吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (9): 2547-2556.doi: 10.13229/j.cnki.jdxbgxb.20221391
• 交通运输工程·土木工程 • 上一篇
共驾型智能车辆人机接管行为序列编码与解析
严利鑫1( ),曾涛1,贺宜2(),郭军华1,胡鑫辉1
),曾涛1,贺宜2(),郭军华1,胡鑫辉1
- 1.华东交通大学 交通运输工程学院,南昌 330013
2.武汉理工大学 智能交通系统研究中心,武汉 430063
Man-machine takeover behavior sequence coding and analysis of shared driving intelligent vehicle
Li-xin YAN1(),Tao ZENG1,Yi HE2(),Jun-hua GUO1,Xin-hui HU1
- 1.School of Transportation Engineering,East China Jiaotong University,Nanchang 330013,China
2.Intelligent Transportation Systems Research Center,Wuhan University of Technology,Wuhan 430063,China
摘要:
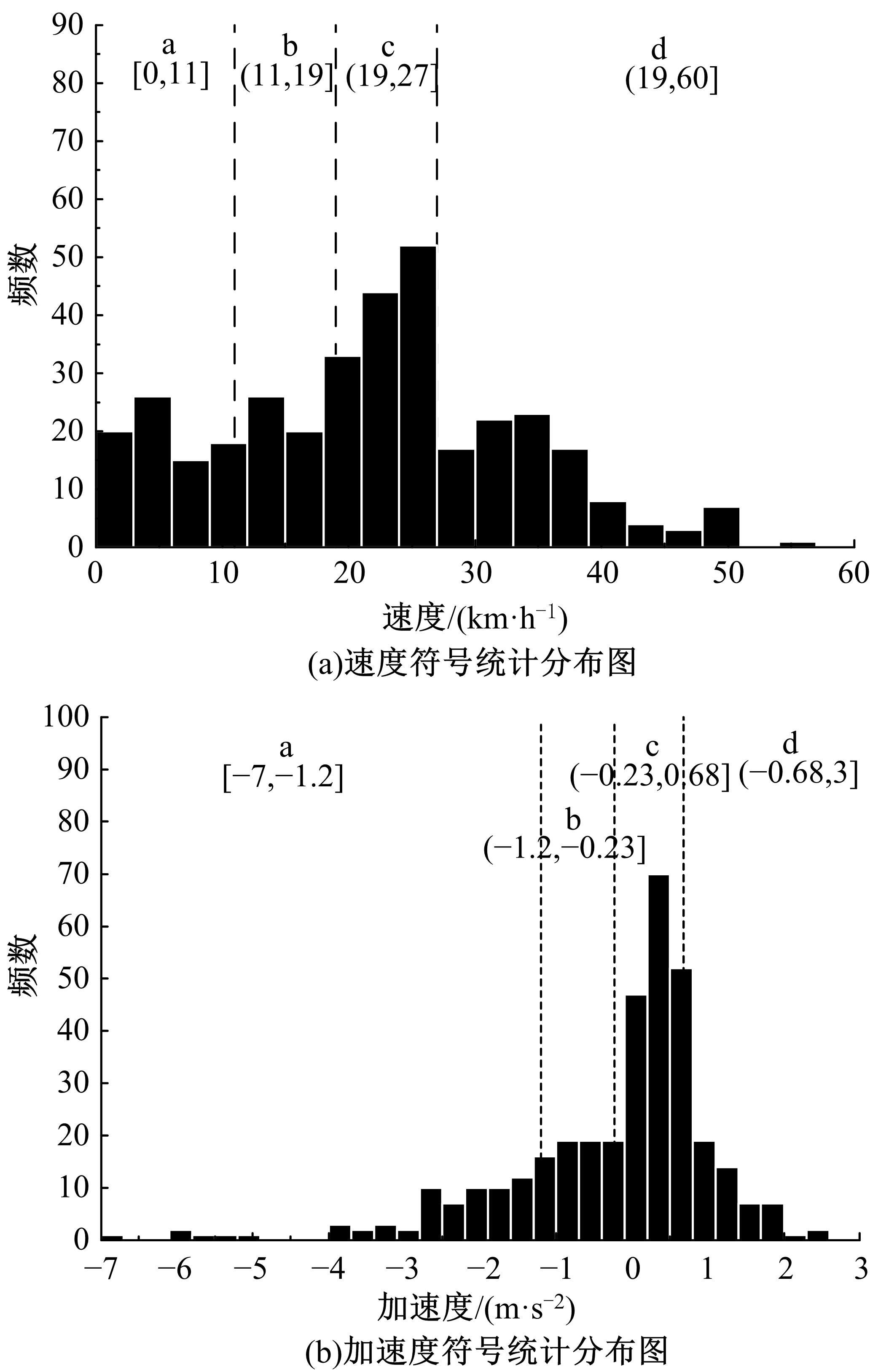
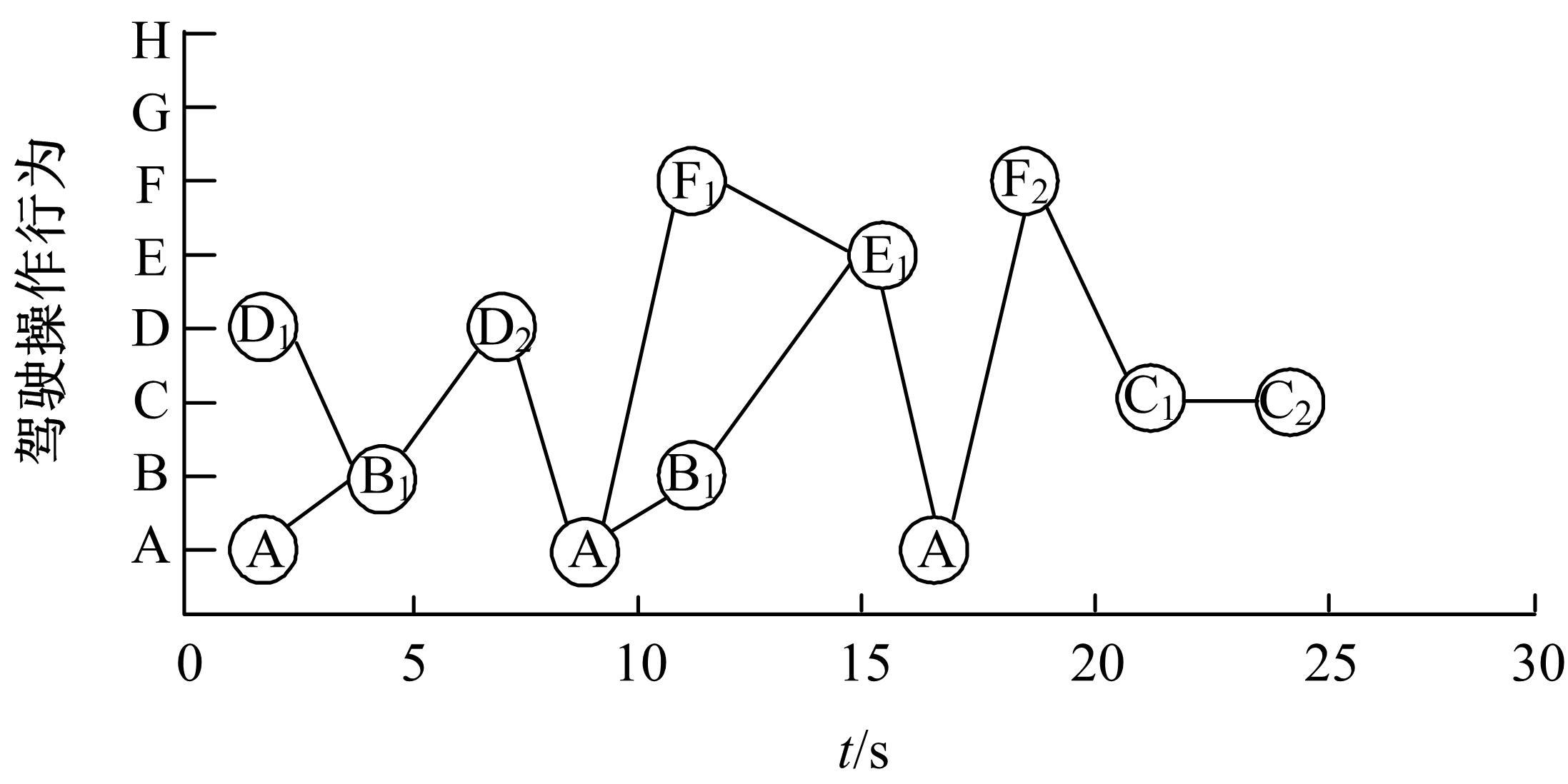
共驾型智能车辆同时具备人工驾驶和自动驾驶模式,其驾驶行为特性必将呈现新的特征。本文收集了15名被试人机接管的驾驶数据,采用符号聚合近似方法和视频录像标定法构建了驾驶行为特征图谱,通过最长公共子序列算法得出共通行为序列。结果表明,当车辆前方出现障碍物时,驾驶接管共通行为序列为:同时注视前方和制动踏板踩下-同时观察左后视镜和打开左转向灯-向左打方向盘-关闭左转向灯,该结论有助于提高智能车辆接管的有效性。
中图分类号:
- U491.1





| 1 | Lotz A, Russwinkel N, Wohlfarth E. Take-over expectation and criticality in level 3 automated driving: a test track study on take-over behavior in semi-trucks[J]. Cognition Technology & Work, 2020, 22(4): 733-744. |
| 2 | 倪定安, 郭凤香, 周燕宁. 无信号控制交叉口老年驾驶人转向行为图谱研究[J]. 交通信息与安全, 2022, 40(3): 108-117. |
| Ni Ding-an, Guo Feng-xiang, Zhou Yan-ning. A graph study on turning behaviors of older drivers at unsignalized intersections[J]. Journal of Transport Information and Safety, 2022, 40(3): 108-117. | |
| 3 | Cai H, Hu Z, Chen Z, et al. A driving fingerprint map method of driving characteristic representation for driver identification[J]. IEEE Access, 2018, 6: 71012-71019. |
| 4 | Balsa-Barreiro J, Valero-Mora P M, Berné-Valero J L, et al. GIS mapping of driving behavior based on naturalistic driving data[J]. International Journal of Geo-Information, 2019, 8(5): No.226. |
| 5 | 万平, 吴超仲, 林英姿, 等. 基于驾驶行为多元时间序列特征的愤怒驾驶状态检测[J]. 吉林大学学报:工学版, 2017, 47(5): 1426-1435. |
| Wan Ping, Wu Chao-zhong, Lin Ying-zi, et al. Driving anger detection based on multivariate time series features of driving behavior[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(5): 1426-1435. | |
| 6 | 严利鑫, 冯进培, 郭军华, 等. 不同险态情景下共驾型智能车辆接管行为特征分析[J].吉林大学学报: 工学版, 2024, 54(3): 683-691. |
| Yan Li-xin, Feng Jin-pei, Guo Jun-hua, et al. Analysis of characteristics of the takeover behavior of co-driving intelligent vehicles under different dangerous scenarios[J]. Journal of Jilin University (Engineering and Technology Edition), 2024, 54(3): 683-691. | |
| 7 | Peng H, Chen F, Chen P. Examining the effects of visibility and time headway on the takeover risk during conditionally automated driving[J]. International Journal of Environmental Research and Public Health, 2022, 19(21): No. 13904. |
| 8 | Yang S, Kuo J, Lenné M G. Effects of distraction in on-road level 2 automated driving: impacts on glance behavior and takeover performance[J]. Human Factors, 2021, 63(8): 1485-1497. |
| 9 | Li Y, Sun D, Zhao M, et al. MPC-based switched driving model for human vehicle co-piloting considering human factors[J]. Transportation Research Part C Emerging Technologies, 2020, 115: No.102612. |
| 10 | 王彦峰, 陈浩林, 赵晓华, 等. 驾驶次任务沉浸等级对接管行为的影响分析[J]. 交通信息与安全, 2022, 40(1): 135-143. |
| Wang Yan-feng, Chen Hao-lin, Zhao Xiao-hua, et al. A study on the impact of immersion levels of non-driving-related tasks on takeover behavior[J]. Journal of Transport Information and Safety, 2022, 40(1): 135-143. | |
| 11 | 孙川. 基于自然驾驶数据的车辆驾驶风险辨识及控制研究[D]. 武汉: 武汉理工大学交通与物流工程学院, 2016. |
| Sun Chuan. Identification and control for driving risk of vehicle using naturalistic driving data[D]. Wuhan: School of Transportation and Logistics Engineering, Wuhan University of Technology, 2016. | |
| 12 | Chen H, Feng S, Xin P, et al. Dangerous driving behavior recognition and prevention using an autoregressive time-series model[J]. Tsinghua Science and Technology, 2017, 22(6): 682-690. |
| 13 | 衡红军, 刘静. 基于混合方法的多维时间序列驾驶异常点检测[J]. 计算机工程, 2020, 46(3): 99-104. |
| Heng Hong-jun, Liu Jing. Driving outlier detection using multidimensional time series based on hybrid methods[J]. Computer Engineering, 2020, 46(3): 99-104. | |
| 14 | Le X T, Tran T M, Nguyen H T. An improvement of SAX representation for time series by using complexity invariance[J]. Intelligent Data Analysis, 2020, 24(3): 625-641. |
| 15 | Zhao A, Chen R, Qi Y, et al. Evaluating the impact of criminalizing drunk driving on road-traffic injuries in guangzhou, China: a time-series study[J]. Journal of Epidemiology, 2016, 26(8): 433-439. |
| 16 | Hung N, Anh D T. An improvement of PAA for dimensionality reduction in large time series databases[C]∥Pacific Rim International Conference on Artificial Intelligence: Trends in Artificial Intelligence. Berlin: Springer-Verlag, 2008: 698-707. |
| 17 | 孙川, 吴超仲, 褚端峰, 等. 基于SAX的车载数据时空语义编码及分析方法[J]. 公路交通科技, 2019, 36(8): 124-132. |
| Sun Chuan, Wu Chao-zhong, Chu Duan-feng, et al. Space-time semantic coding for on-board data and analysis method based on SAX[J]. Journal of Highway and Transportation Research and Development, 2019, 36(8): 124-132. | |
| 18 | 吕超, 鲁洪良, 于洋, 等. 基于分层强化学习和社会偏好的自主超车决策系统[J]. 中国公路学报, 2022, 35(3): 115-126. |
| Chao Lyu, Lu Hong-liang, Yu Yang, et al. Autonomous overtaking decision making system based on hierarchical reinforcement learning and social preferences[J]. China Journal of Highway and Transport, 2022, 35(3): 115-126. | |
| 19 | Cunneen M, Mullins M, Murphy F. Autonomous vehicles and embedded artificial intelligence: the challenges of framing machine driving decisions[J]. Applied Artificial Intelligence, 2019, 33(8): 706-731. |
| 20 | 伍毅平, 赵晓华. 基于图谱的个体驾驶行为特征描述方法研究[J]. 交通工程, 2018, 18(1): 13-17. |
| Wu Yi-ping, Zhao Xiao-hua. A graph based method to describe individual driving behavior[J]. Journal of Transportation Engineering, 2018, 18(1): 13-17. |
| [1] | 周锡浈,宫贺,李敦敦,季彦婕,严杰. 建成环境对路内停车泊位使用率的非线性影响模型[J]. 吉林大学学报(工学版), 2024, 54(9): 2520-2530. |
| [2] | 曲昭伟,李霖,陈永恒,吴场建. 长区间掉头车辆特性分析及其安全评价[J]. 吉林大学学报(工学版), 2024, 54(8): 2206-2213. |
| [3] | 何永明,权聪,魏堃,冯佳,万亚楠,陈世升. 超高速公路车路协同路侧单元感知融合方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1923-1934. |
| [4] | 程国柱,盛林,王浩宇,冯天军. 考虑右转车二次冲突的信号交叉口行人过街安全评价方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1903-1912. |
| [5] | 秦雅琴,钱正富,谢济铭. 协同换道避障模型和轨迹数据驱动的车辆协同避障策略[J]. 吉林大学学报(工学版), 2024, 54(5): 1311-1322. |
| [6] | 张明业,杨敏,黎彧,黄世玉,李清韵. 考虑有序充电策略的多车型电动公交调度优化[J]. 吉林大学学报(工学版), 2024, 54(5): 1293-1301. |
| [7] | 陈仁祥,胡超超,胡小林,杨黎霞,张军,何家乐. 基于改进YOLOv5的驾驶员分心驾驶检测[J]. 吉林大学学报(工学版), 2024, 54(4): 959-968. |
| [8] | 赵晓华,刘畅,亓航,欧居尚,姚莹,郭淼,杨海益. 高速公路交通事故影响因素及异质性分析[J]. 吉林大学学报(工学版), 2024, 54(4): 987-995. |
| [9] | 金志刚,苏仁鋆,赵晓芳. 基于异质图网络的心理评估方法[J]. 吉林大学学报(工学版), 2024, 54(4): 1078-1085. |
| [10] | 涂辉招,王万锦,乔鹏,郭静秋,鹿畅,吴海飞. 自动驾驶卡车路测安全员接管干预行为解析[J]. 吉林大学学报(工学版), 2024, 54(3): 727-740. |
| [11] | 曲大义,张可琨,顾原,王韬,宋慧,戴守晨. 自动驾驶车辆换道决策行为分析及分子动力学建模[J]. 吉林大学学报(工学版), 2024, 54(3): 700-710. |
| [12] | 严利鑫,冯进培,郭军华,龚毅轲. 不同险态情景下共驾型智能车辆接管行为特征分析[J]. 吉林大学学报(工学版), 2024, 54(3): 683-691. |
| [13] | 姜文明,齐立忠,张苏,荣经国,武宏波,左超,张晓龙. 基于知识图谱的电网工程建筑信息模型质量检查方法[J]. 吉林大学学报(工学版), 2024, 54(3): 807-814. |
| [14] | 马潇驰,陆建. 基于基因表达式编程的高架道路事故实时预测[J]. 吉林大学学报(工学版), 2024, 54(3): 719-726. |
| [15] | 张健,李青扬,李丹,姜夏,雷艳红,季亚平. 基于深度强化学习的自动驾驶车辆专用道汇入引导[J]. 吉林大学学报(工学版), 2023, 53(9): 2508-2518. |
|
||