吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (3): 683-691.doi: 10.13229/j.cnki.jdxbgxb.20220580
• 交通运输工程·土木工程 • 上一篇
不同险态情景下共驾型智能车辆接管行为特征分析
严利鑫( ),冯进培,郭军华,龚毅轲
),冯进培,郭军华,龚毅轲
- 华东交通大学 交通运输工程学院,南昌 330013
Analysis of characteristics of the takeover behavior of co⁃driving intelligent vehicles under different dangerous scenarios
Li-xin YAN(),Jin-pei FENG,Jun-hua GUO,Yi-ke GONG
- School of Transportation Engineering,East China Jiaotong University,Nanchang 330013,China
摘要:
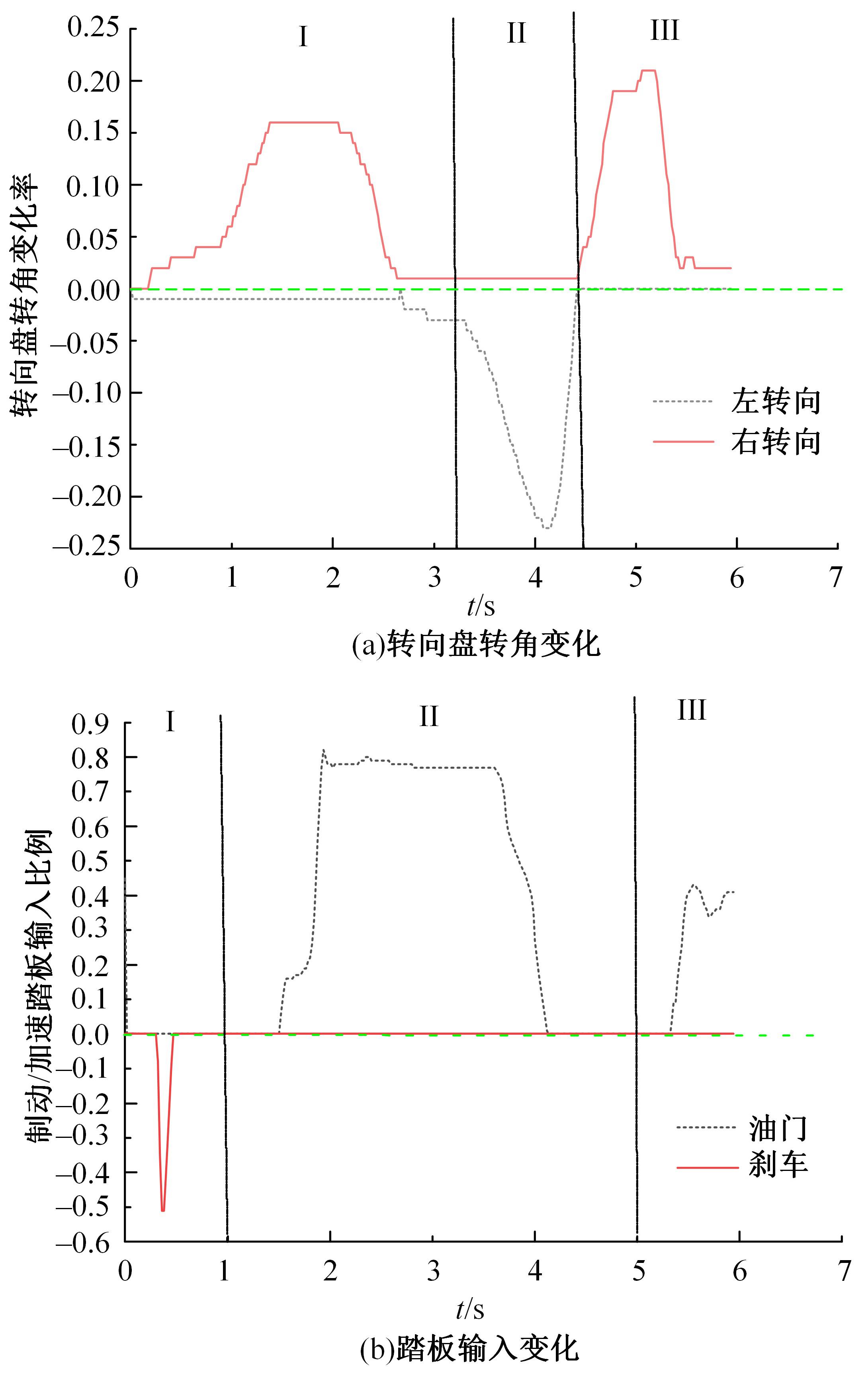
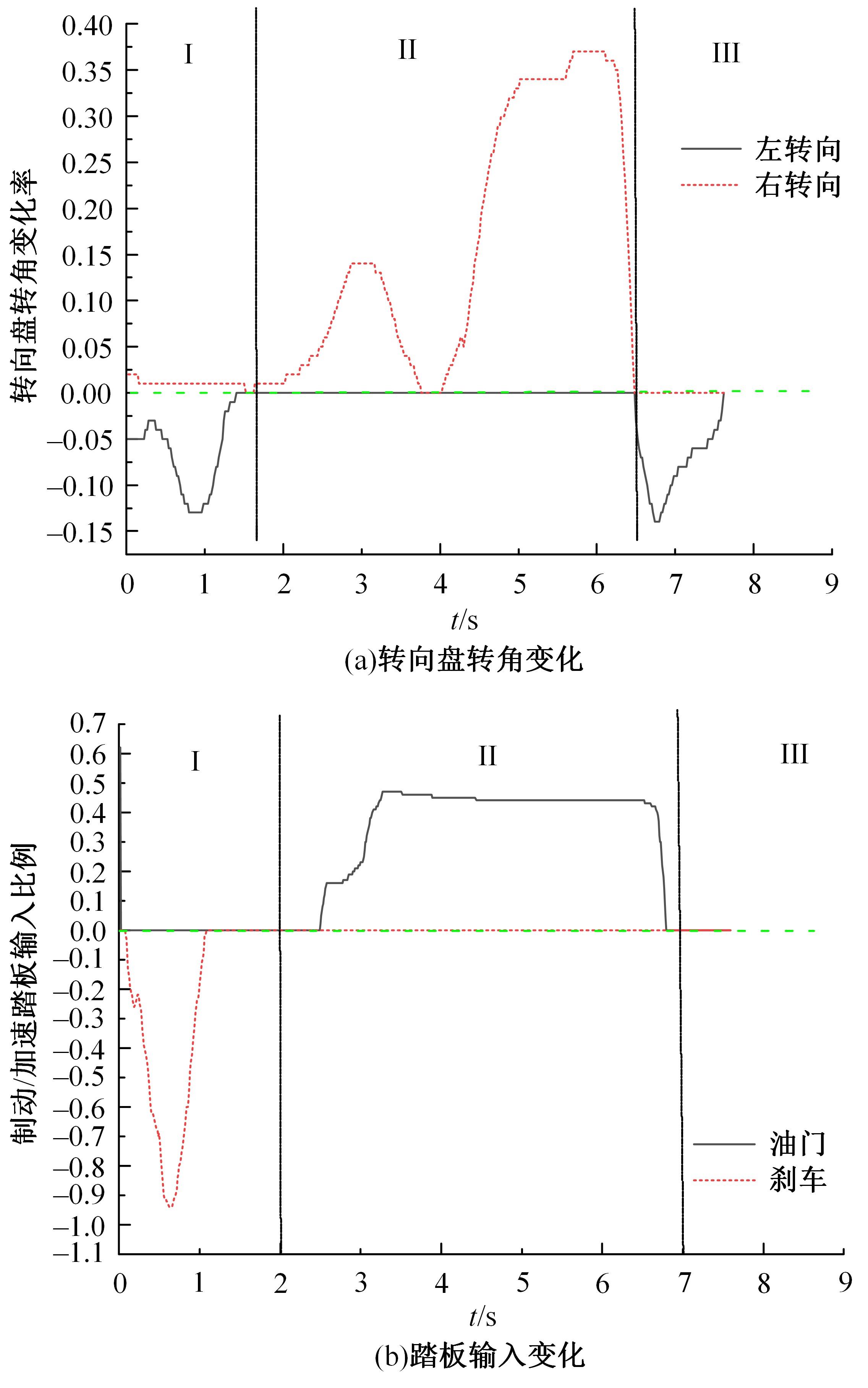
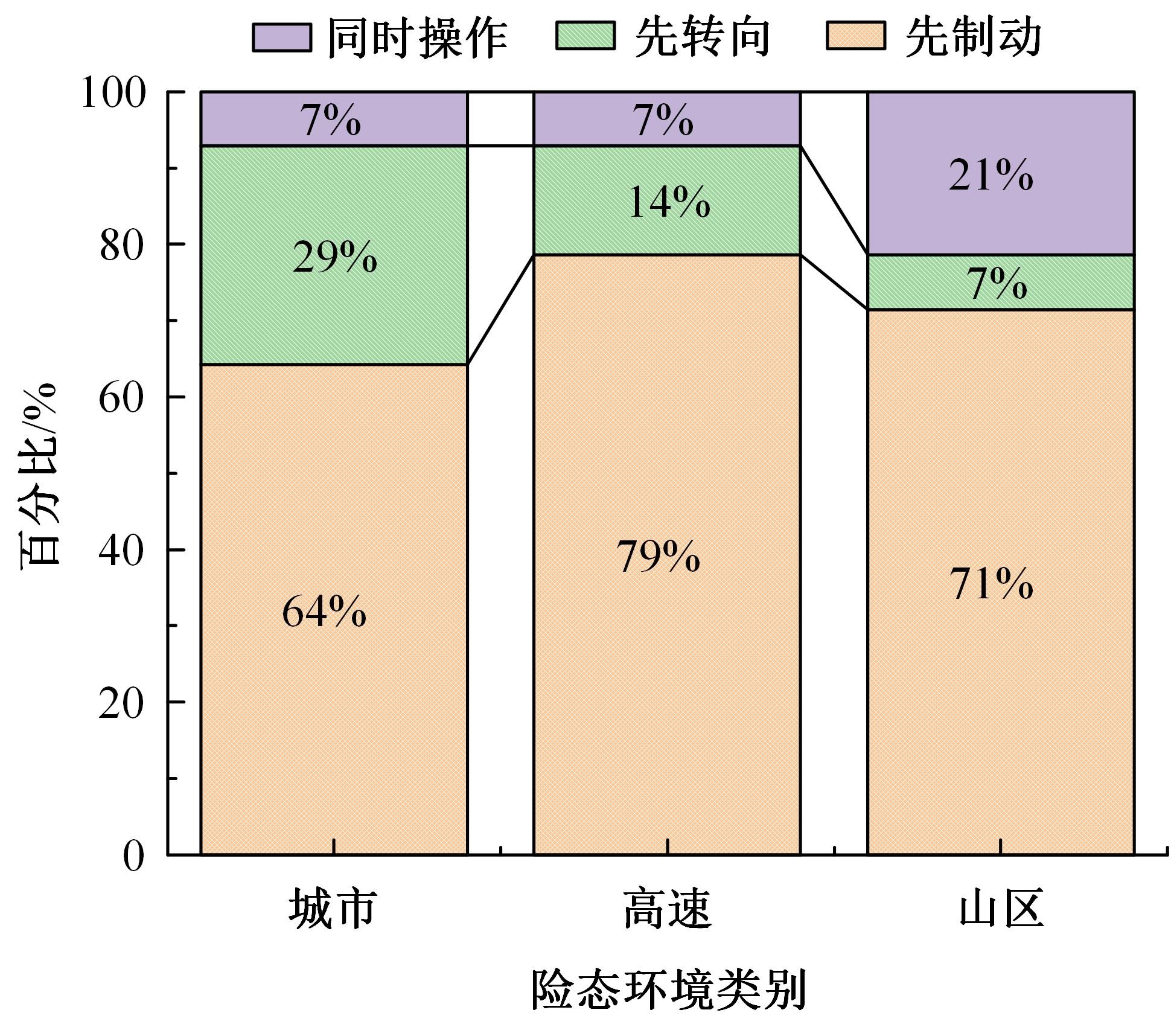
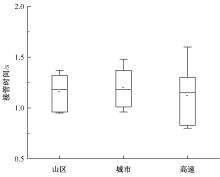
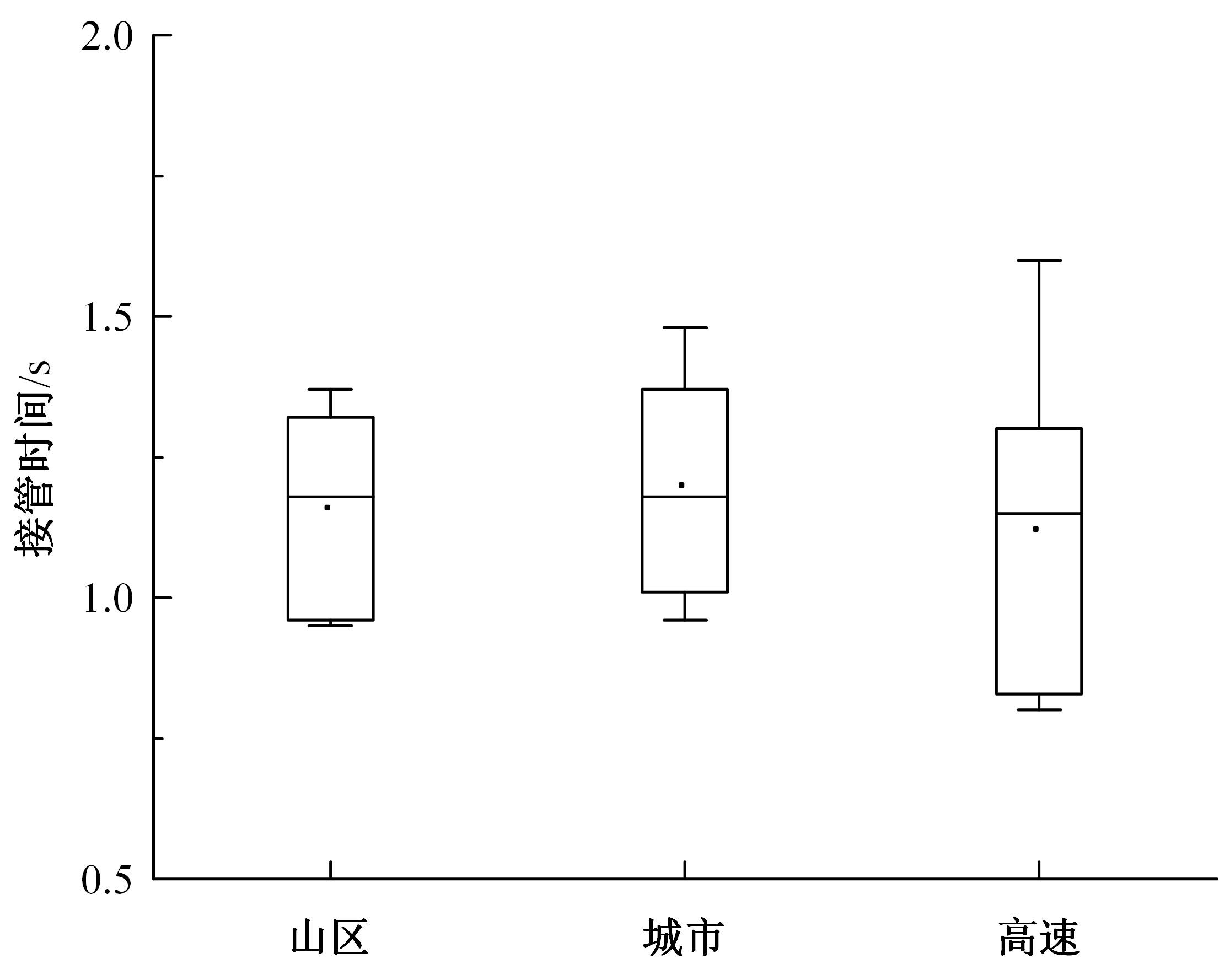
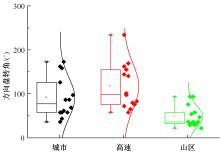
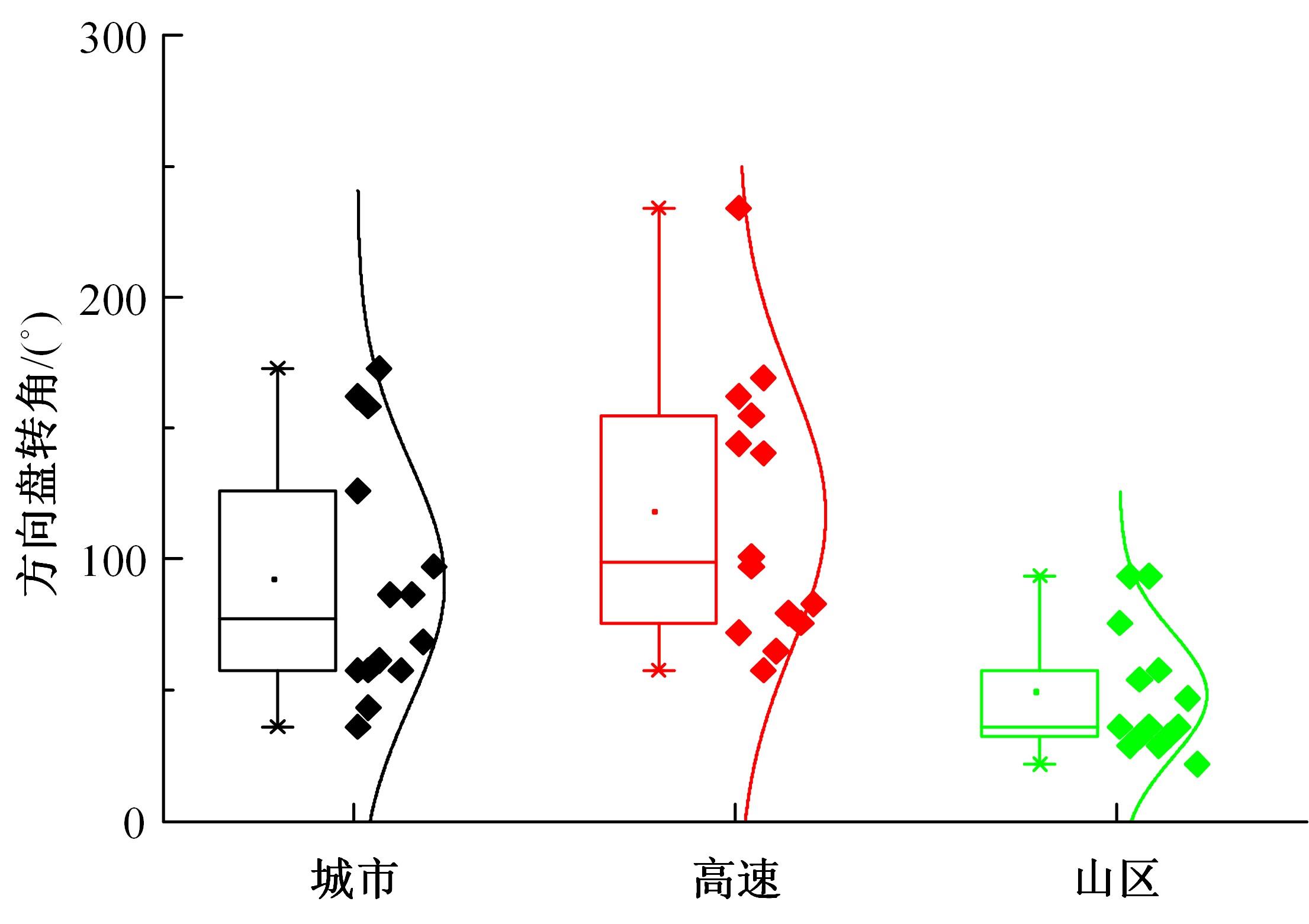
为提高驾驶人在不同险态交通情景下接管智能车辆的安全性,在模拟驾驶平台上分别研究了高速公路、山区道路和城市道路3类典型险态环境下驾驶人接管行为的特征和差异性。试验采集并分析了16名驾驶人在3类典型险态环境下的驾驶行为数据。结果表明:①驾驶人在接管车辆时采取的应急操作包括制动、转向、同时转向制动3种,各行为占比分别为71.4%、16.7%和11.9%。②不同险态交通情景下驾驶人接管反应时间无显著差异(P>0.05);在高速-城市险态情景下车辆最大纵向减速度存在显著差异(P=0.002<0.05),在山区-城市险态情景下车辆最大纵向减速度存在显著差异(P=0.048<0.05);在城市-山区险态情景下车辆最大转向盘转角存在显著差异(P=0.015<0.05);在山区-高速险态情景下车辆最大转向盘转角存在显著差异(P=0.000<0.05)。说明在不同险态交通情景下应采用不同的接管措施以提升接管的安全性和有效性。本文研究结果可为不同险态环境下的智能车辆接管系统研发提供参考。
中图分类号:
- U491.25








| 1 | 胡云峰, 曲婷, 刘俊,等. 智能汽车人机协同控制的研究现状与展望[J]. 自动化学报, 2019, 45(7): 1261-1280. |
| Hu Yun-feng, Qu Ting, Liu Jun, et al. Human-machine cooperative control of intelligent vehicle: recent developments and future perspectives[J]. Automatic Chemical, 2019, 45(7): 1261-1280. | |
| 2 | SAE J3016. Taxonomy and definitions for terms related to on-road motor vehicle automated driving systems [S]. |
| 3 | 姚荣涵, 徐文韬, 郭伟伟. 基于因子长短期记忆的驾驶人接管行为及意图识别[J]. 吉林大学学报: 工学版, 2023, 53(3): 758-771. |
| Yao Rong-han, Xu Wen-tao, Guo Wei-wei, et al. Drivers' takeover behavior and intention recognition based on factor and long short⁃term memory[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(3): 758-771. | |
| 4 | Dogan E, Honnêt V, Masfrand S, et al. Effects of non-driving-related tasks on takeover performance in different takeover situations in conditionally automated driving[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2019, 62: 494-504. |
| 5 | Zeeb K, Buchner A. Is take-over time all that matters? The impact of visual-cognitive load on driver takeover quality after conditionally automated driving[J]. Accident Analysis & Prevention, 2016, 92: 230-239. |
| 6 | 鲁光泉, 赵鹏云, 王兆杰, 等. 自动驾驶中视觉次任务对年轻驾驶人接管时间的影响[J]. 中国公路学报, 2018, 31(4): 165-171. |
| Lu Guang-quan, Zhao Peng-yun, Wang Zhao-jie, et al. Effects of visual tasks on young drivers in automatic driving[J]. Journal of China Road, 2018, 31(4): 165-171. | |
| 7 | Park S, Jeong H, Kwon C, et al. Analysis of take-over time and stabilization of autonomous vehicle using a driving simulator[J]. The Journal of The Korea Institute of Intelligent Transport Systems, 2019, 18(4): 31-43. |
| 8 | Park S, Yun Y W, Ko H,et al. Analysis of the influence of road traffic conditions and weather on the take-over of a conditional autonomous vehicle[J]. The Journal of the Korea Institute of Intelligent Transport Systems, 2020, 19(6): 235-249. |
| 9 | Kim J W, Yang J H. Understanding metrics of vehicle control take-over requests in simulated automated vehicles[J]. International Journal of Automotive Technology, 2020, 21(3): 757-770. |
| 10 | Lin Q F, Lyu Y, Zhang K F, et al. Effects of non-driving related tasks on readiness to take over control in conditionally automated driving[J]. Traffic Injury Prevention, 2021, 22(8): 629-633. |
| 11 | Samani A R, Mishra S, Dey K. Assessing the effect of long-automated driving operation, repeated take-over requests, and driver's characteristics on commercial motor vehicle drivers' driving behavior and reaction time in highly automated vehicles[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2022, 84: 239-261. |
| 12 | Feldhütter A, Gold C, Schneider S, et al. How the duration of automated driving influences take-over performance and gaze behavior[C]∥Advances in Ergonomic Design of Systems, Products and Processes, Springer, Berlin, Heidelberg, 2017: 309-318. |
| 13 | Radlmayr J, Gold C, Lorenz L, et al. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving[J]. Proceedings of the Human Factors & Ergonomics Society Annual Meeting, 2014, 58(1): 2063-2067. |
| 14 | 钮建伟, 张雪梅, 孙一品, 等. 险情中驾驶人接管自动驾驶车辆的驾驶行为研究[J]. 中国公路学报, 2018, 31(6): 272-280. |
| Niu Jian-wei, Zhang Xue-mei, Sun Yi-pin, et al. Study on the driving behavior of the driver in the automatic driving vehicle in the danger[J]. Journal of China Road, 2018, 31(6): 272-280. | |
| 15 | 林庆峰, 王兆杰, 鲁光泉. 城市道路环境下自动驾驶车辆接管绩效分析[J]. 中国公路学报, 2019, 32(6): 240-247. |
| Lin Qing-feng, Wang Zhao-jie, Lu Guang-quan. Analysis of automatic driving vehicle in urban road environment[J]. Journal of China Highway, 2019, 32(6): 240-247. | |
| 16 | Körber M, Gold C, Lechner D, et al. The influence of age on the take-over of vehicle control in highly automated driving[J]. Transportation Research Part F Traffic Psychology & Behaviour, 2016, 39: 19-32. |
| 17 | Wu C, Wu H, Lyu N, et al. Take-over performance and safety analysis under different scenarios and secondary tasks in conditionally automated driving[J]. IEEE Access, 2019, 7: 136924-136933. |
| 18 | 郭烈, 胥林立, 秦增科, 等. 自动驾驶接管影响因素分析与研究进展[J]. 交通运输系统工程与信息, 2022, 22(2): 72-90. |
| Guo Lie, Xu Lin-li, Qin Zeng-ke, et al. Analysis and research progress of influencing factors of autonomous driving takeover[J]. Transportation Systems Engineering and Information Technology, 2022, 22(2): 72-90. | |
| 19 | Ito T, Takata A, Oosawa K. Time required for take-over from automated to manual driving[C]∥SAE International Paper, 2016-01-0158. |
| 20 | Clark H, Feng J. Age differences in the takeover of vehicle control and engagement in non-driving-related activities in simulated driving with conditional automation[J]. Accident Analysis & Prevention, 2017, 106: 468-479. |
| [1] | 谢宪毅,王禹涵,金立生,赵鑫,郭柏苍,廖亚萍,周彬,李克强. 基于改变控制时域时间步长的智能车轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(3): 620-630. |
| [2] | 张健,李青扬,李丹,姜夏,雷艳红,季亚平. 基于深度强化学习的自动驾驶车辆专用道汇入引导[J]. 吉林大学学报(工学版), 2023, 53(9): 2508-2518. |
| [3] | 郑植,袁佩,金轩慧,魏思斯,耿波. 桥墩复合材料柔性防撞护舷试验[J]. 吉林大学学报(工学版), 2023, 53(9): 2581-2590. |
| [4] | 李洪涛,王琳虹,李俊达. 公路交叉口照明和限速对视觉搜索能力的影响[J]. 吉林大学学报(工学版), 2023, 53(8): 2287-2297. |
| [5] | 李建华,王泽鼎. 考虑路径耗时的城市汽车分布式充电桩选点规划[J]. 吉林大学学报(工学版), 2023, 53(8): 2298-2303. |
| [6] | 巫威眺,曾坤,周伟,李鹏,靳文舟. 基于多源数据和响应面优化的公交客流预测深度学习方法[J]. 吉林大学学报(工学版), 2023, 53(7): 2001-2015. |
| [7] | 何永明,陈世升,冯佳,万亚楠. 基于高精地图的超高速公路虚拟轨道系统[J]. 吉林大学学报(工学版), 2023, 53(7): 2016-2028. |
| [8] | 程国柱,盛林,赵浩,冯天军. 基于危险度分析的信号交叉口专用相位设置条件[J]. 吉林大学学报(工学版), 2023, 53(7): 1962-1969. |
| [9] | 薛志佳,王召阳,张久鹏,晏长根,许子凯,张英立,黄晓明,马涛. 泥石流作用下道路结构韧性分析及提升[J]. 吉林大学学报(工学版), 2023, 53(6): 1773-1781. |
| [10] | 刘振亮,赵存宝,吴云鹏,马迷娜,马龙双. 数据驱动的公路桥梁网络全寿命抗震韧性评估[J]. 吉林大学学报(工学版), 2023, 53(6): 1695-1701. |
| [11] | 贾洪飞,徐英俊,杨丽丽,王楠. 商品车多式联运联盟成员选择及利益分配[J]. 吉林大学学报(工学版), 2023, 53(4): 1060-1069. |
| [12] | 孙超,尹浩为,汤文蕴,褚昭明. 交通需求估计下的检测器布局和手机数据扩样推断[J]. 吉林大学学报(工学版), 2023, 53(4): 1070-1077. |
| [13] | 常玉林,徐文倩,孙超,张鹏. 车联网环境下考虑遵从程度的混合流量逐日均衡[J]. 吉林大学学报(工学版), 2023, 53(4): 1085-1093. |
| [14] | 肖雪,李克平,彭博,昌满玮. 基于决策-规划迭代框架的智驾车换道行为建模[J]. 吉林大学学报(工学版), 2023, 53(3): 746-757. |
| [15] | 姚荣涵,徐文韬,郭伟伟. 基于因子长短期记忆的驾驶人接管行为及意图识别[J]. 吉林大学学报(工学版), 2023, 53(3): 758-771. |
|
||