吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (6): 1948-1962.doi: 10.13229/j.cnki.jdxbgxb.20221102
智能网联环境下无信号交叉口车辆通行控制策略
潘福全1( ),牛远征1,张丽霞2,杨金顺1,陈秀锋1,陈德启1
),牛远征1,张丽霞2,杨金顺1,陈秀锋1,陈德启1
- 1.青岛理工大学 土木工程学院,山东 青岛 266520
2.青岛理工大学 机械与汽车工程学院,山东 青岛 266520
Strategies for controlling vehicle movements at signal⁃free intersections in intelligent networked environment
Fu-quan PAN1(),Yuan-zheng NIU1,Li-xia ZHANG2,Jin-shun YANG1,Xiu-feng CHEN1,De-qi CHEN1
- 1.School of Civil Engineering,Qingdao University of Technology,Qingdao 266520,China
2.School of Mechanical and Automotive Engineering,Qingdao University of Technology,Qingdao 266520,China
摘要:
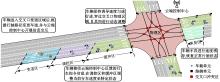
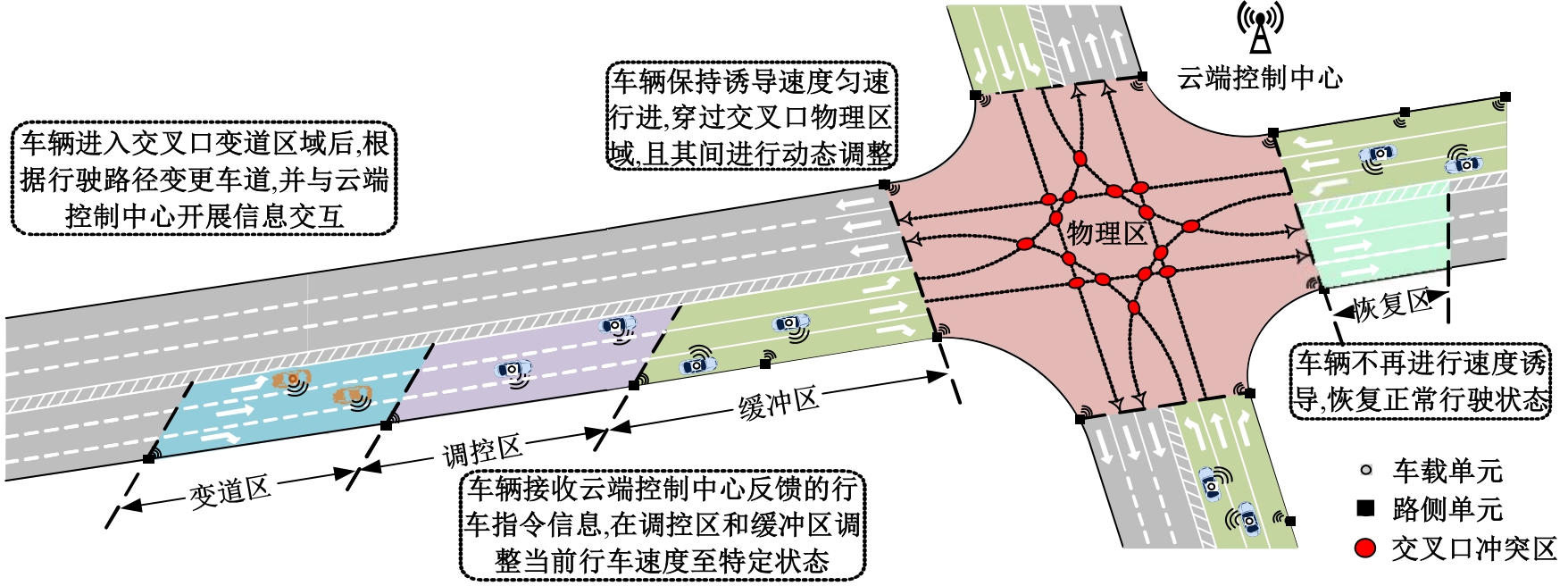
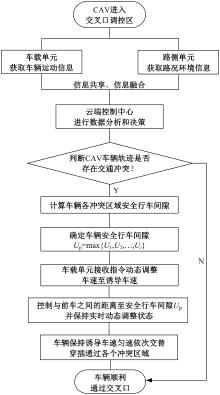
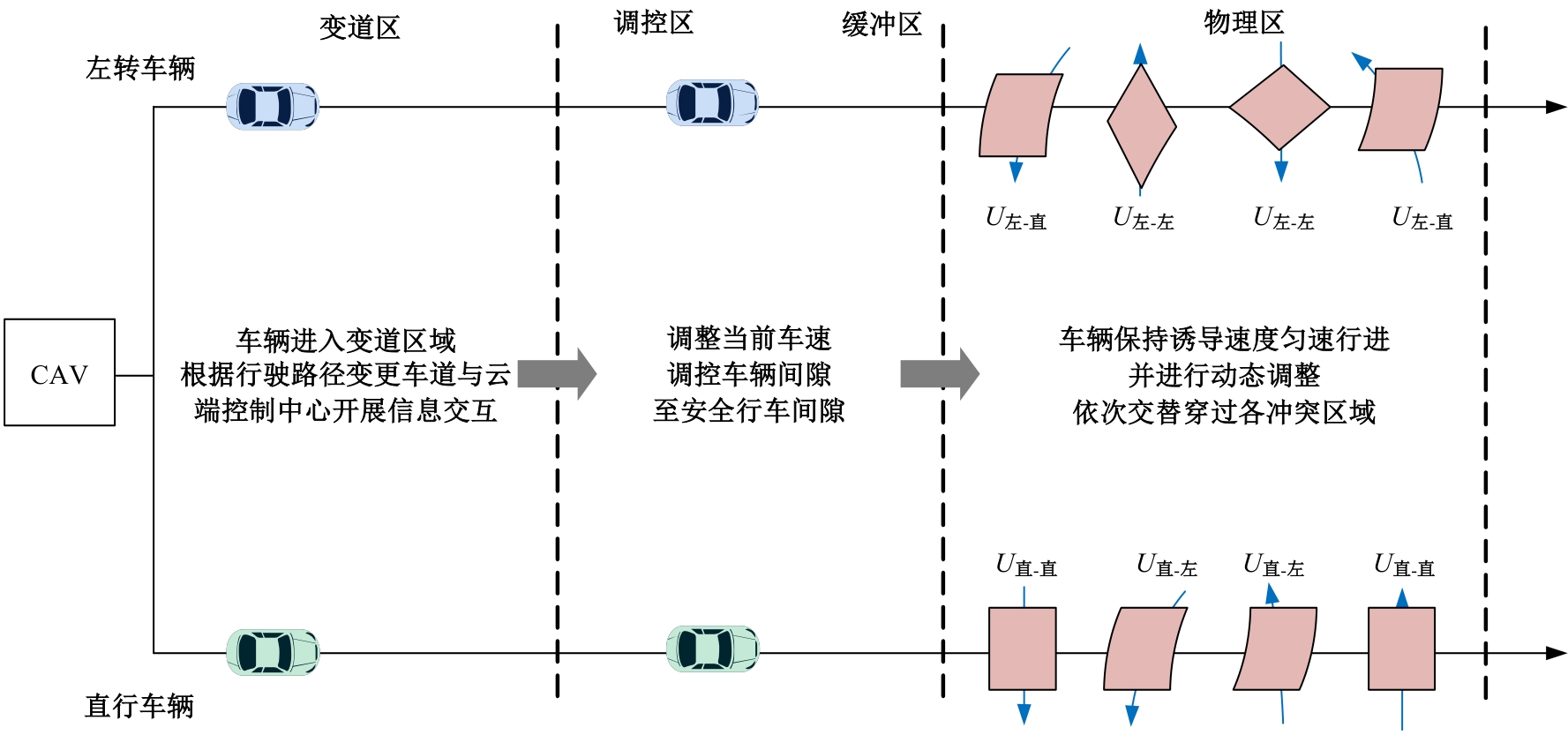
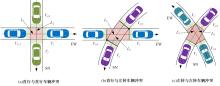
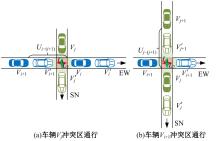
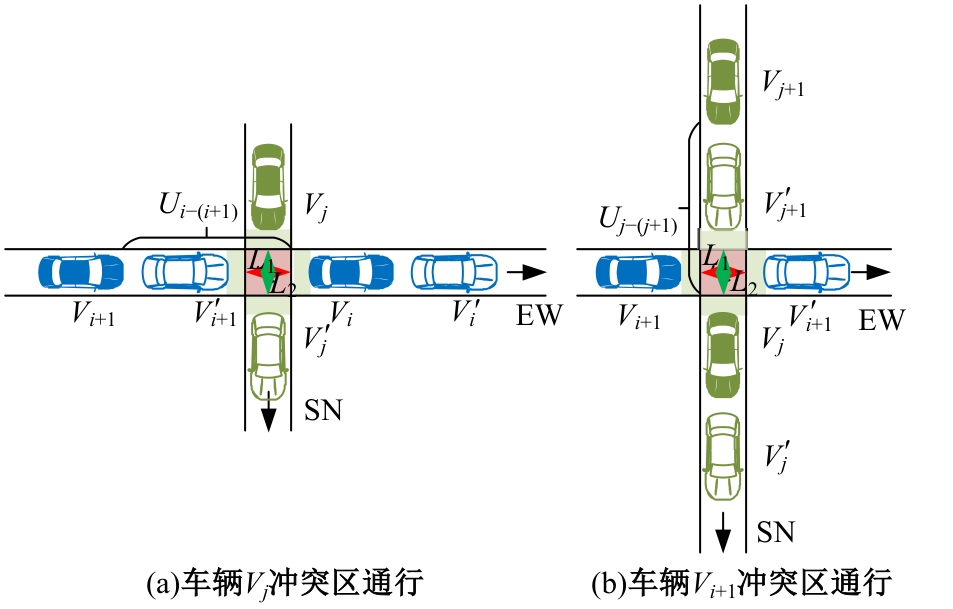
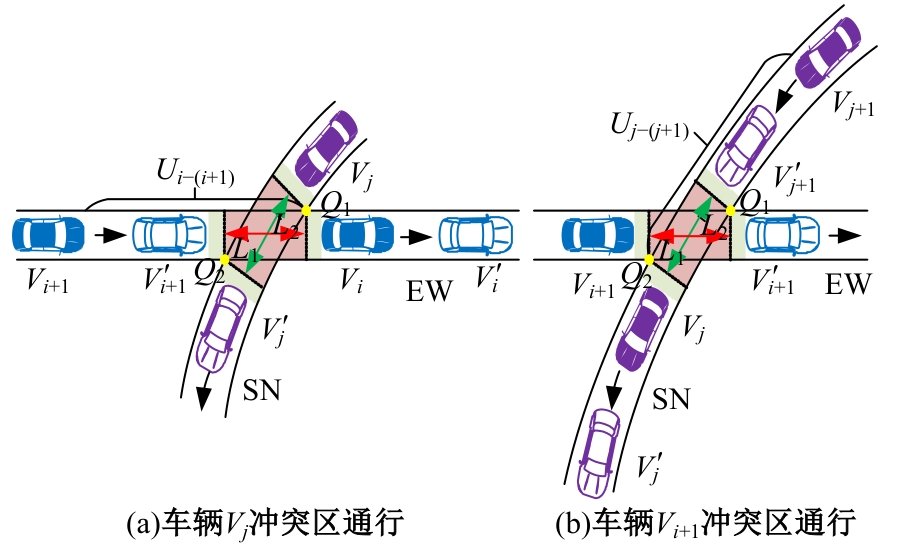
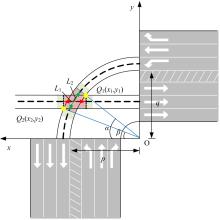
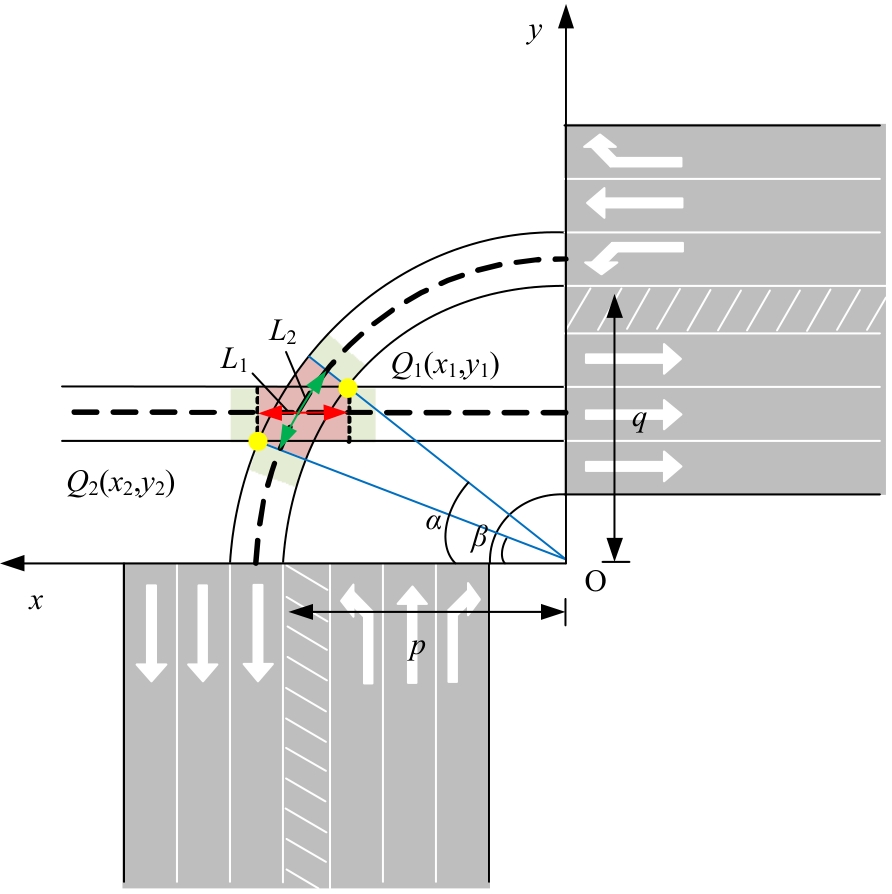
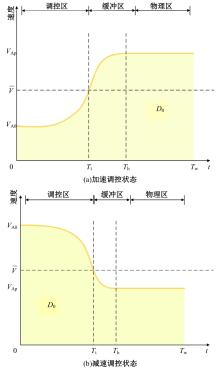
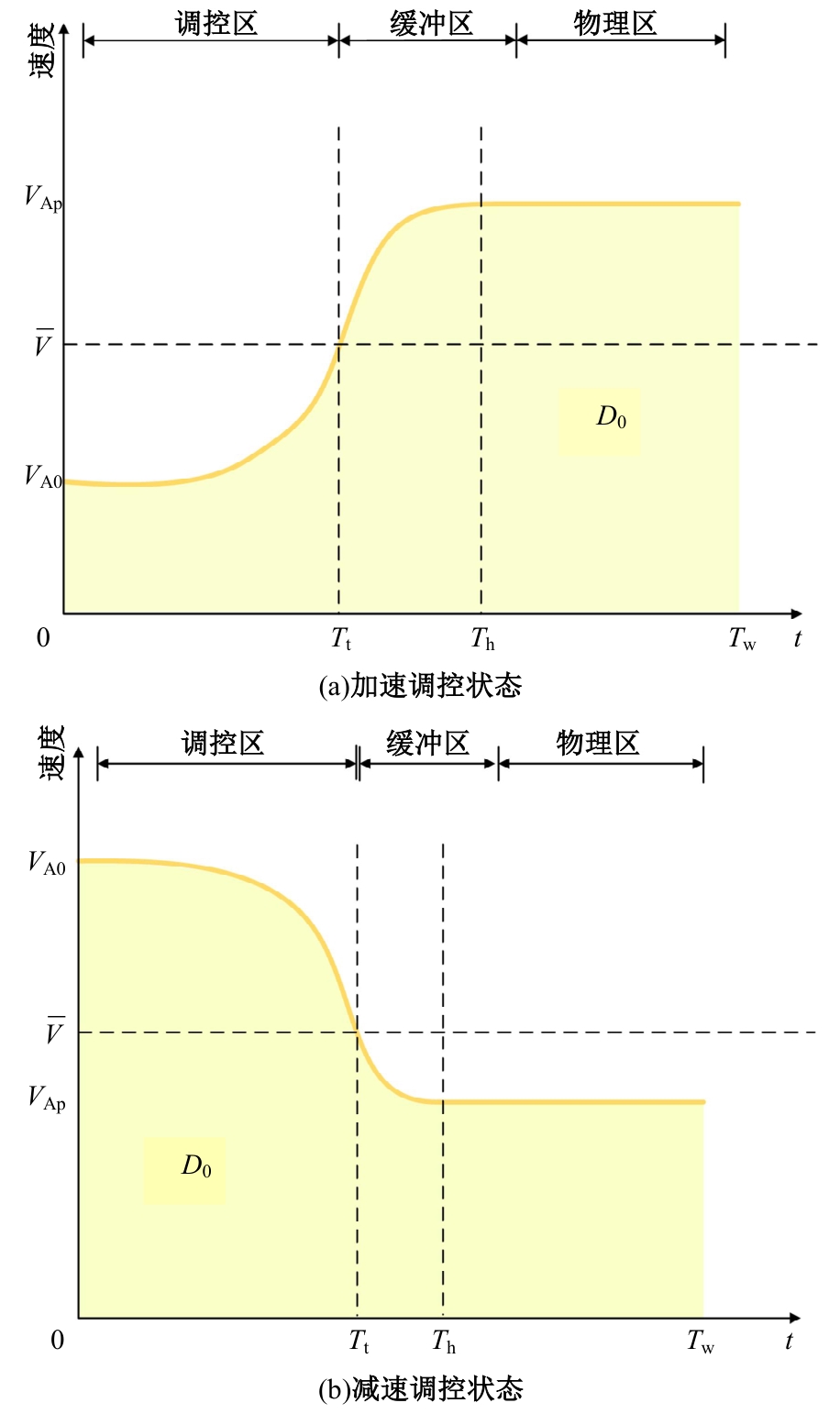
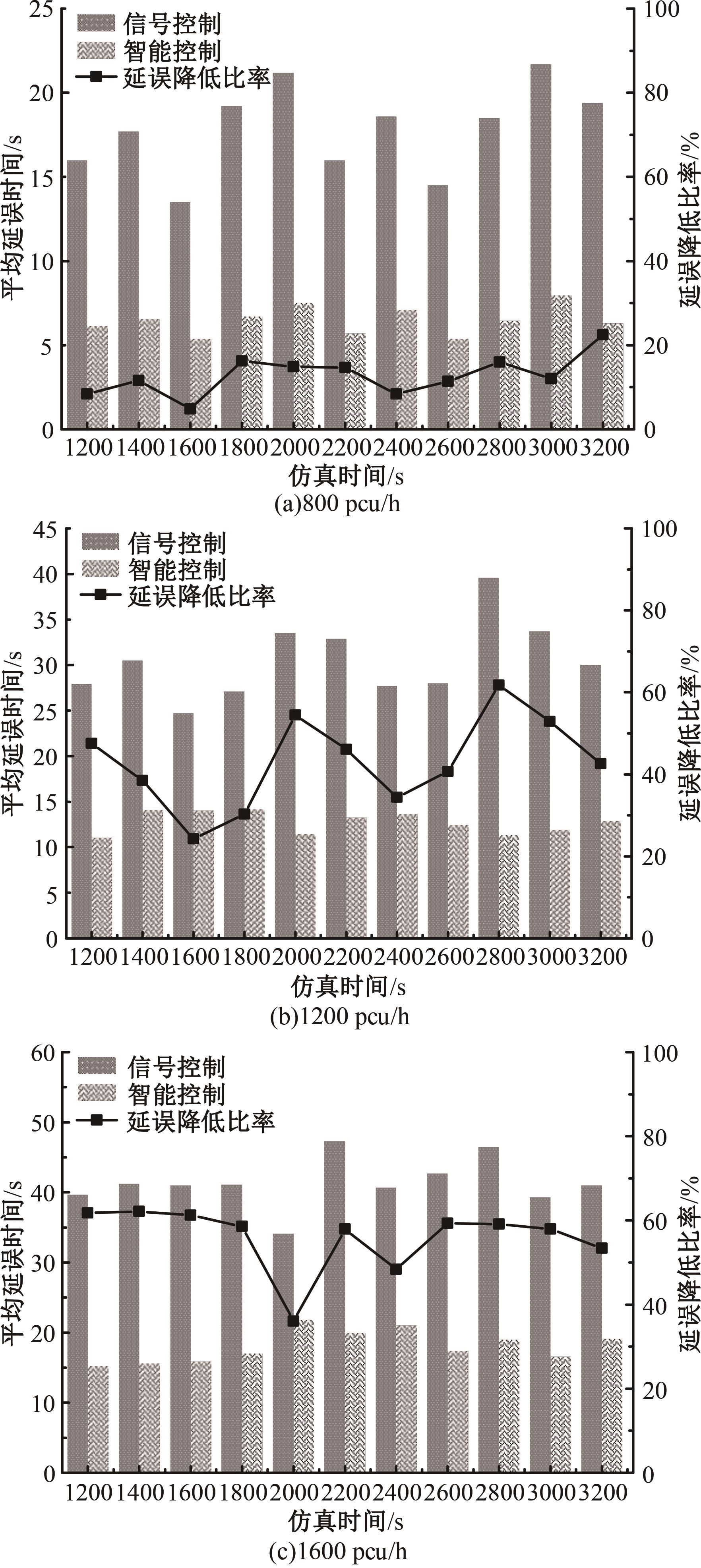
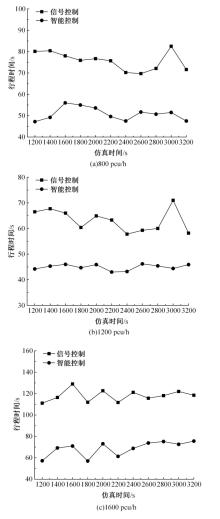
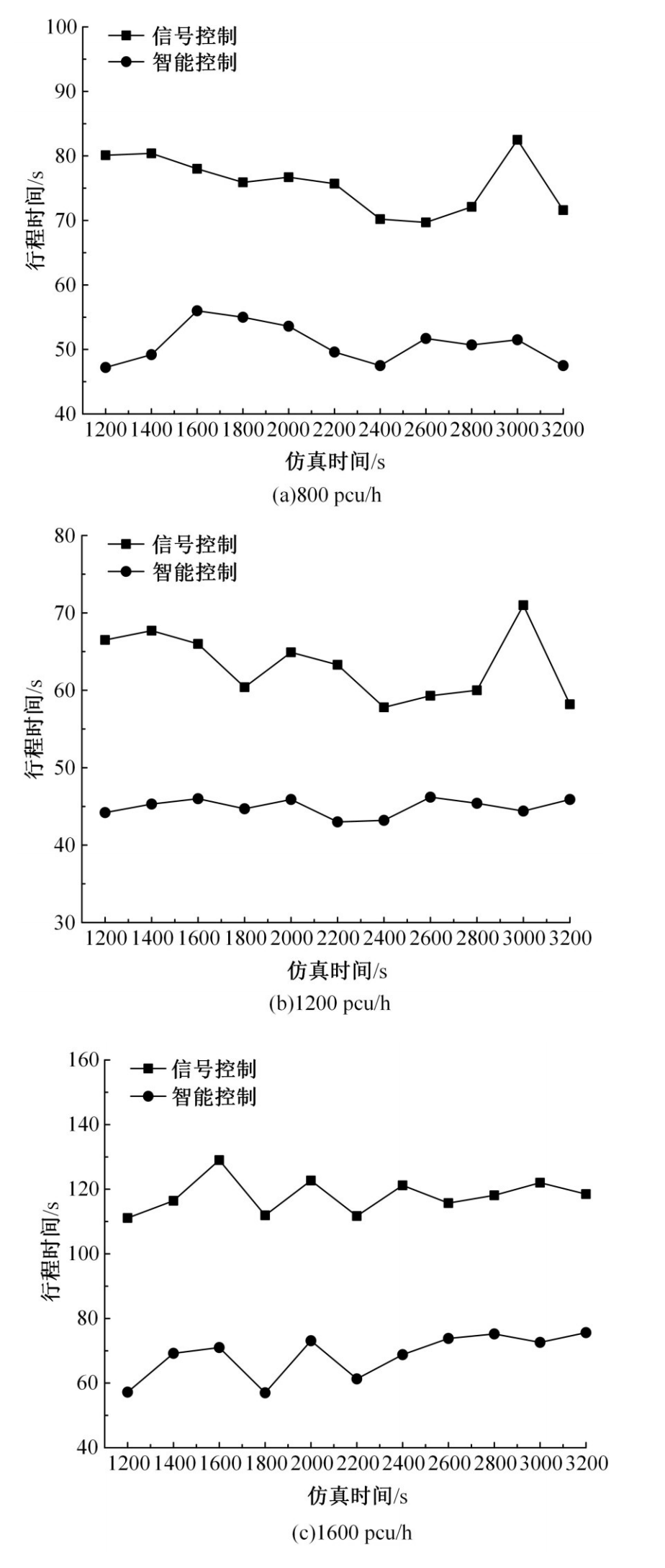
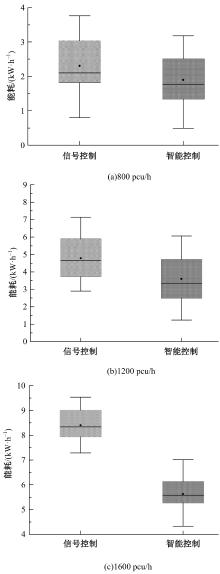
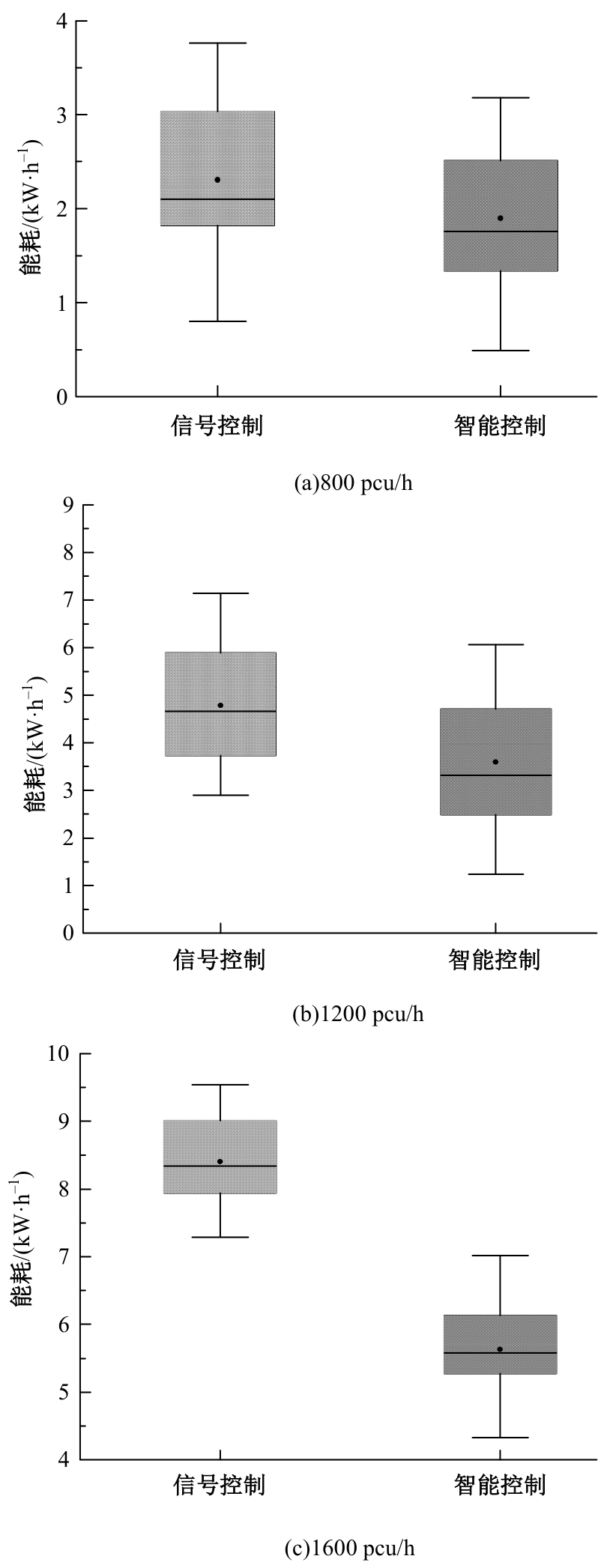
为实现智能网联环境下无信号交叉口网联自动驾驶车辆的智能管控,提高交叉口通行效率,提出了一种基于间隙理论的车辆通行控制策略。依据交叉口区域功能、用途等,将其划分为变道区、调控区、缓冲区、物理区和恢复区;考虑实车物理大小建立了物理区车辆冲突区域计算模型,并通过优化左转车辆轨迹为椭圆轨迹,开发了直行-直行、直行-左转和左转-左转车辆行车间隙控制的数学模型;基于三角函数加速度控制策略建立了调控区和缓冲区的车速诱导模型;运用Vissim和Matlab联合仿真对控制策略及模型的高效性和合理性进行了对比验证。结果表明:本文控制策略及模型能使相冲突的车辆安全不停车地依次穿插通过冲突区域;对比信号控制策略,在交通量为1 600 pcu/h情况下,该控制策略及模型可使车辆通过交叉口的平均延误时间缩短55.97%,平均行程时间缩短41.87%,车辆能耗减少33.31%,且交通流量越大,改善效果越显著。
中图分类号:
- U491.2





| [1] | Zhong G, Zhang J, Yin T T, et al. A cooperative management strategy designed for unsignalized intersections under a connected vehicle environment[J]. Coat International Conference of Transportation Professionals, 2015, 2015: 233-245. |
| [2] | 胡永辉, 金旭峰, 王亦兵, 等. 智能网联混行动力异构交通流生态驾驶[J].中国公路学报, 2022, 35(3): 15-27. |
| Hu Yong-hui, Jin Xu-feng, Wang Yi-bing, et al. Intelligent networked hybrid mobility for heterogeneous traffic flow eco-driving[J]. Chinese Journal of Highways, 2022, 35(3): 15-27. | |
| [3] | Lee J, Park B. Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment[J]. IEEE Intelligent Transportation System, 2012, 13(1): 81-90. |
| [4] | 张游, 潘福全, 张丽霞, 等. 车路协同环境下智能交叉口车速控制[J]. 控制理论与应用, 2022, 39(6): 1057-1064. |
| Zhang You, Pan Fu-quan, Zhang Li-xia,et al. Intelligent intersection speed control in a vehicle-road cooperative environment[J]. Control Theory and Applications, 2022, 39(6): 1057-1064. | |
| [5] | 潘福全, 张游, 张丽霞, 等. 车路协同下基于间隙理论的交叉口智能控制策略[J]. 重庆交通大学学报: 自然科学版, 2022, 41(1): 44-52. |
| Pan Fu-quan, Zhang You, Zhang Li-xia, et al. Intelligent control strategy of intersection based on gap theory under vehicle-road cooperation[J]. Journal of Chongqing Jiaotong University (Natural Science Edition), 2022, 41(1): 44-52. | |
| [6] | Chen W, Liu Y. Gap-based automated vehicular speed guidance towards eco-driving at an unsignalized intersection[J]. Transportmetrica B: Transport Dynamics, 2017, 2017(3): 1-22. |
| [7] | Chai L G, Cai B G, Wei S G, et al. Connected and autonomous vehicles coordinating approach at intersection based on space-time slot[J]. Transportmetrica A: Transport Science, 2018, 14(10): 929-951. |
| [8] | 刘显贵, 王晖年, 洪经纬, 等. 网联环境下信号交叉口车速控制策略及优化[J]. 交通运输系统工程与信息, 2021, 21(2): 82-90. |
| Liu Xian-gui, Wang Hui-nian, Hong Jing-wei, et al. Signal intersection speed control strategy and optimization in a network-linked environment[J]. Transportation Systems Engineering and Information, 2021, 21(2): 82-90. | |
| [9] | Mahyar A, Mehdi N, Oliver G. Optimal traffic control at smart intersections: automated network fundamental diagram[J]. Transportation Research Part B, 2019, 137: 2-18. |
| [10] | Zhang Y, Cassandras C G. Decentralized optimal control of connected automated vehicles at signal-free intersections including comfort-constrained turns and safety guarantees[J]. Automatica, 2019, 109: No.108563. |
| [11] | 常玉林, 张成祥, 张鹏, 等. 车联网环境下基于间隙优化的无信号交叉口车速控制方法[J]. 重庆理工大学学报: 自然科学, 2021, 35(3): 10-17, 60. |
| Chang Yu-lin, Zhang Cheng-xiang, Zhang Peng, et al. A gap optimization-based speed control method for signal-free intersections in a connected vehicle environment[J]. Journal of Chongqing University of Technology (Natural Sciences), 2021, 35(3): 10-17, 60. | |
| [12] | 潘福全, 张丽霞, 陆键, 等. 接入管理技术在公路交叉口安全改善中的运用[J]. 北京工业大学学报, 2011, 37(2): 237-242. |
| Pan Fu-quan, Zhang Li-xia, Lu Jian, et al. The application of access management technology in highway intersection safety improvement[J]. Journal of Beijing University of Technology, 2011, 37(2): 237-242. | |
| [13] | Milanés V, Shladover S E, Spring J, et al. Cooperative adaptive cruise control in real traffic situations[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 15(1): 296-305. |
| [14] | Milanés V, Shladover S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. |
| [15] | Xiao L, Wang M, Schakel W, et al. Unravelling effects of cooperative adaptive cruise control deactivation on traffic flow characteristics at merging bottlenecks[J]. Transportation Research Part C: emerging technologies, 2018, 96: 380-397. |
| [16] | Wu X, Freese D, Cabrera A, et al. Electric vehicles' energy consumption measurement and estimation[J]. Transportation Research Part D: Transport and Environment, 2015, 34: 52-67. |
| [17] | Altan O D, Wu G, Barth M J, et al. GlidePath: eco-friendly automated approach and departure at signalized intersections[J]. IEEE Transactions on Intelligent Vehicles, 2017, 2(4): 266-277. |
| [18] | 张健, 吴坤润, 杨敏, 等. 智能网联环境下交叉口双环自适应控制模型[J]. 吉林大学学报: 工学版, 2021, 51(2): 541-548. |
| Zhang Jian, Wu Kun-run, Yang Min, et al. Dual-loop adaptive control model for intersections in an intelligent network link environment[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(2): 541-548. | |
| [19] | Stevanovic J, Stevanovic A, Martin P T, et al. Stochastic optimization of traffic control and transit priority settings in VISSIM[J]. Transportation Research Part C: Emerging Technologies, 2008, 16(3): 332-349. |
| [20] | Mahmassani H S. 50th Anniversary invited article—autonomous vehicles and connected vehicle systems: flow and operations considerations[J]. Transportation Science, 2016, 50(4): 1140-1162. |
| [1] | 赵红专,吴泽健,张鑫,石胜文,李文勇,展新,许恩永,王佳明. 基于密度离散度和信息传输延迟的网联商用车弯道格子模型[J]. 吉林大学学报(工学版), 2025, 55(6): 2015-2029. |
| [2] | 闫晟煜,程铭杰,田宏策,王洪瑀,周永恒,马博浩. 封闭式景区纯电动客车调度方法[J]. 吉林大学学报(工学版), 2025, 55(6): 1984-1993. |
| [3] | 潘义勇,徐家聪,尤逸文,全勇俊. 网约车出行需求影响因素多尺度空间异质性分析[J]. 吉林大学学报(工学版), 2025, 55(5): 1567-1575. |
| [4] | 卢凯明,陈艳艳,仝瑶,张健,李永行,罗莹. 数据驱动的信号交叉口排队尾车驶离状态预测[J]. 吉林大学学报(工学版), 2025, 55(4): 1275-1286. |
| [5] | 周成栋,宋菲,赵小梅,姚俊杰. 基于多模式双动态演化的拥堵收费模型[J]. 吉林大学学报(工学版), 2025, 55(4): 1319-1327. |
| [6] | 张河山,范梦伟,谭鑫,郑展骥,寇立明,徐进. 基于改进YOLOX的无人机航拍图像密集小目标车辆检测[J]. 吉林大学学报(工学版), 2025, 55(4): 1307-1318. |
| [7] | 秦严严,肖腾飞,罗钦中,王宝杰. 雾天高速公路车辆跟驰安全分析与控制策略[J]. 吉林大学学报(工学版), 2025, 55(4): 1241-1249. |
| [8] | 宋现敏,湛天舒,李海涛,刘博,张云翔. 考虑用户成本和泊位利用率的停车预约分配模型[J]. 吉林大学学报(工学版), 2025, 55(4): 1287-1297. |
| [9] | 郭祎,魏书威,姜涛. 基于区位势能和多源数据的城市客运交通规划算法[J]. 吉林大学学报(工学版), 2025, 55(4): 1328-1335. |
| [10] | 刘照霞,付锐,牛世峰. 基于极值理论与智能网联信息的超车风险评估[J]. 吉林大学学报(工学版), 2025, 55(3): 925-937. |
| [11] | 潘义勇,徐翔宇. 数据不平衡的MobileViT网络交通事故严重程度预测模型[J]. 吉林大学学报(工学版), 2025, 55(3): 947-953. |
| [12] | 陈永恒,杨家伟,孙经宇. 借道左转交叉口的网联左转车辆最佳轨迹控制[J]. 吉林大学学报(工学版), 2025, 55(2): 614-622. |
| [13] | 陈发城,鲁光泉,林庆峰,张浩东,马社强,刘德志,宋会军. 有条件自动驾驶下驾驶人接管行为综述[J]. 吉林大学学报(工学版), 2025, 55(2): 419-433. |
| [14] | 何永明,冯佳,魏堃,万亚楠. 超高速公路曲线路段车辆制动侧滑影响因素分析[J]. 吉林大学学报(工学版), 2025, 55(2): 591-602. |
| [15] | 吴娇蓉,刘旭东. 不同住房类型空间单元的建成环境对通勤方式选择的影响分析[J]. 吉林大学学报(工学版), 2025, 55(2): 554-565. |
|