吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (9): 2883-2891.doi: 10.13229/j.cnki.jdxbgxb.20240005
• 车辆工程·机械工程 • 上一篇
基于并联平台的船舶运动测量及补偿
黄玲涛( ),李晨旭,张红彦()
),李晨旭,张红彦()
- 吉林大学 机械与航空航天工程学院,长春 130022
Ship motion measurement and compensation based on parallel platform
Ling-tao HUANG(),Chen-xu LI,Hong-yan ZHANG()
- School of Mechanical and Aerospace Engineering,Jilin University,Changchun 130022,China
摘要:
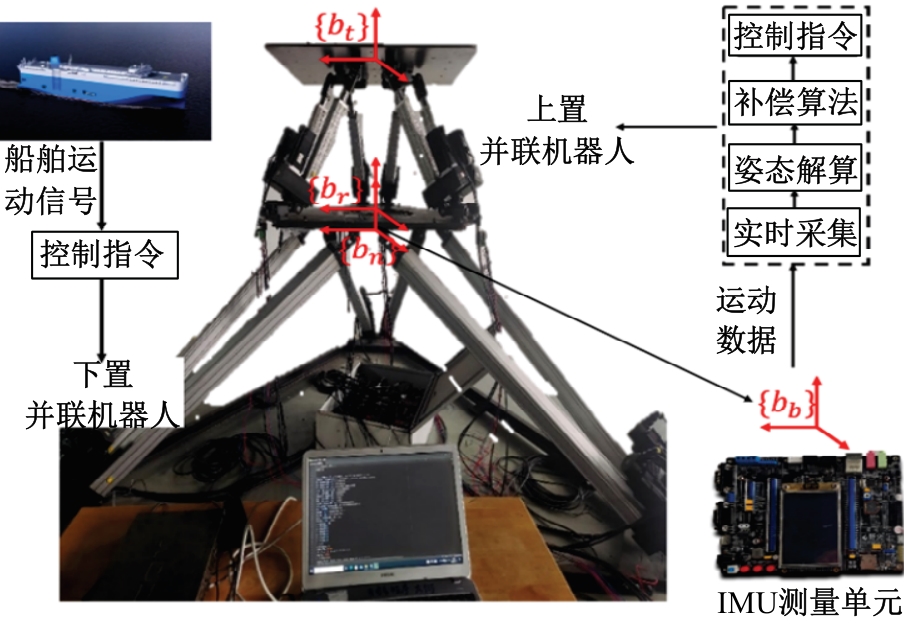
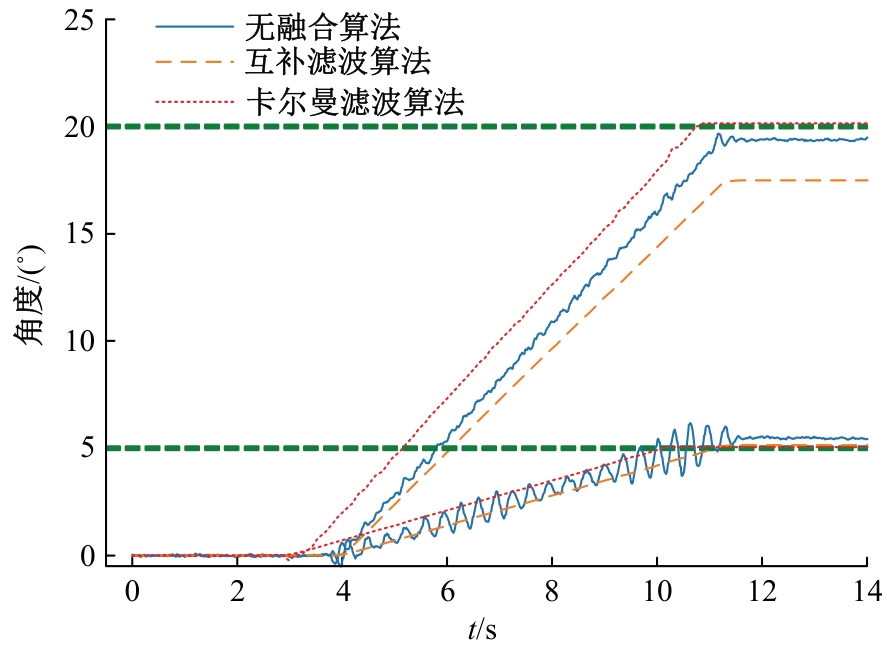
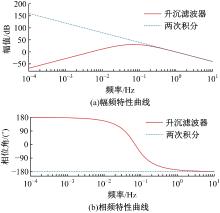
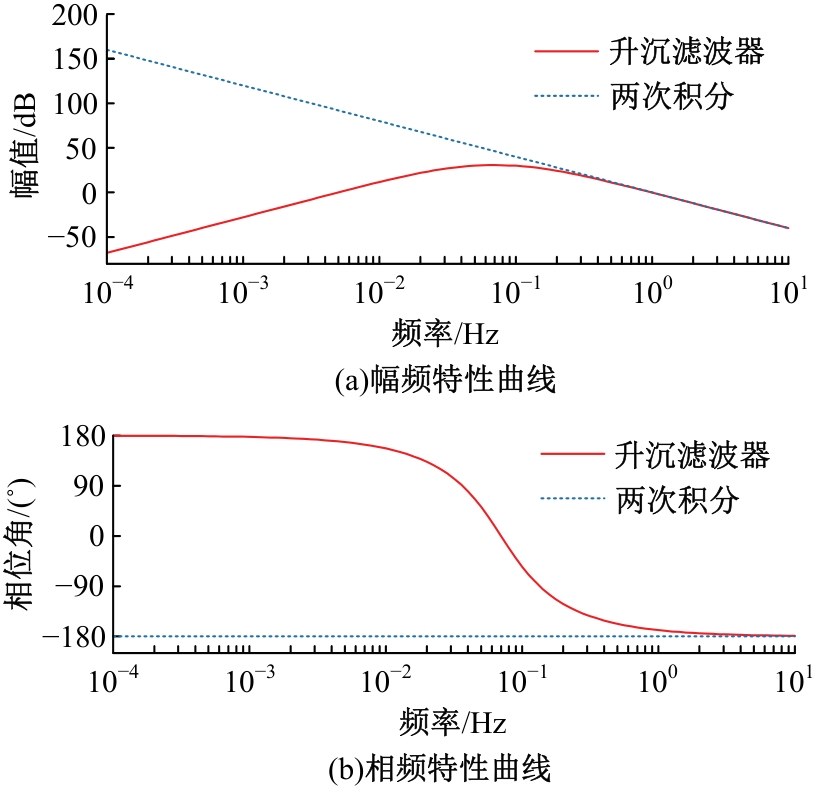
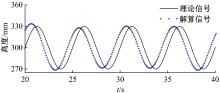
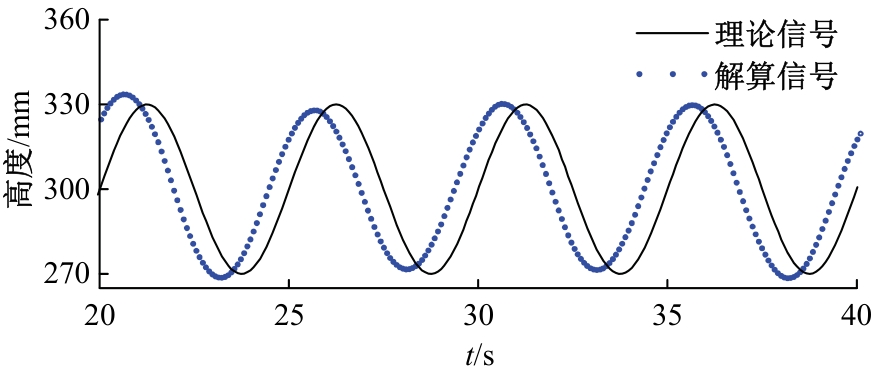
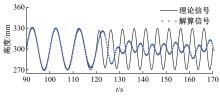
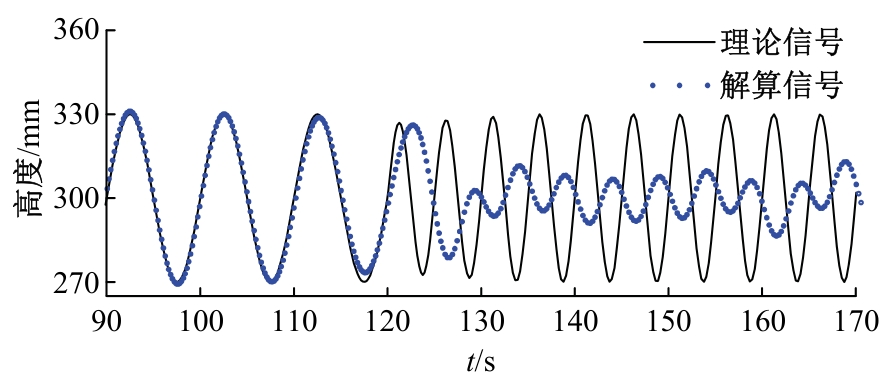
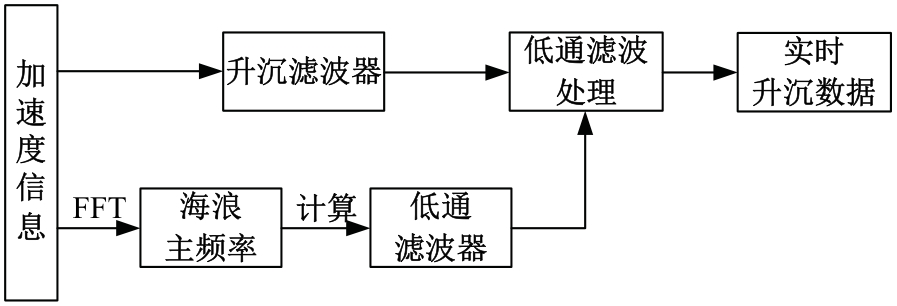
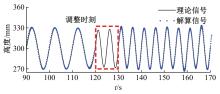
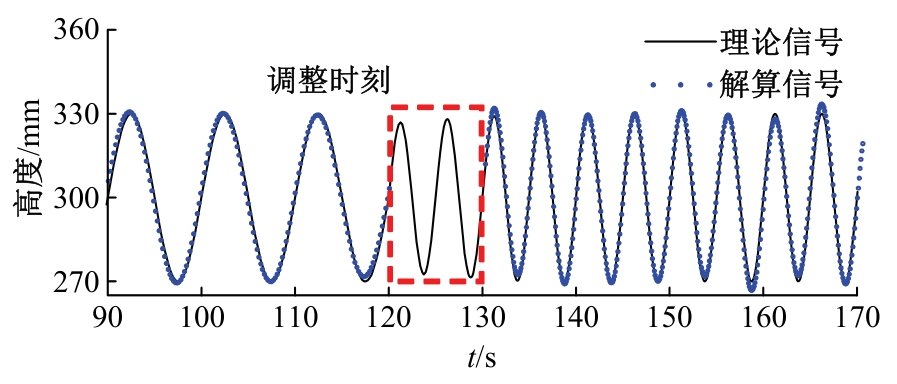
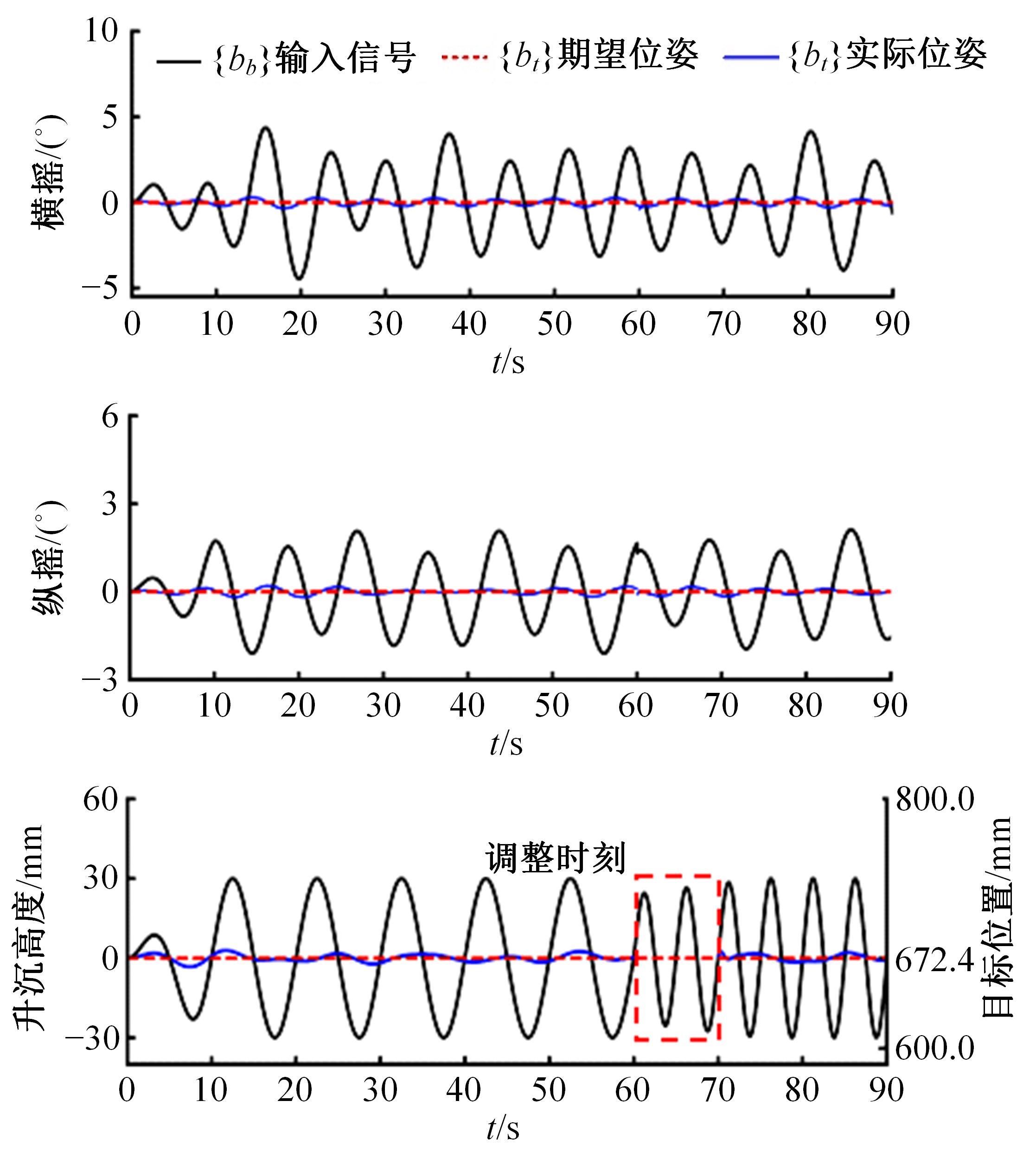
针对船舶在海浪作用下的多自由度复合运动补偿问题,提出了一种基于并联平台模拟海浪的船舶运动测量及补偿算法,包含姿态解算算法及升沉位移解算算法。首先,搭建一个由2个六自由度并联平台串联的船舶运动补偿实验平台;其次,基于惯性测量单元,采用卡尔曼滤波姿态解算算法对船舶模拟运动的横摇、纵摇姿态进行解算;再次,设计升沉位移解算算法,该算法具有高通滤波、相位补偿及海浪频率自适应的特性;最后,进行船舶运动补偿实验。实验结果表明,上置并联平台能够有效抑制海浪对船舶运动的影响,显著提高船舶作业的平稳性。实验验证了本文所提算法的合理性及有效性,为真实船舶运动补偿研究提供一种有效方法。
中图分类号:
- TP29


| [1] | 张哲, 郑国富, 丁兰, 等. 福建省海洋工程装备产业现状与发展对策探讨[J]. 海洋开发与管理, 2018, 35(5): 114-118. |
| Zhang Zhe, Zheng Guo-fu, Ding Lan, et al. The industrial status and developing countermeasures of marine engineering equipment in Fujian province[J]. Ocean Development and Management, 2018, 35(5): 114-118. | |
| [2] | 刘贤胜. 船用起重机主动升沉补偿控制系统研究[D]. 哈尔滨:哈尔滨工程大学船舶工程学院, 2016. |
| Liu Xian-sheng. Research on active heave compensation control system for marine cranes[D]. Harbin: School of Shipbuilding Engineering, Harbin Engineering University, 2016. | |
| [3] | From P J, Gravdahl J T, Abbeel P. On the influence of ship motion prediction accuracy on motion planning and control of robotic manipulators on seaborne platforms[C]∥Proceeding of International Conference on Robotics and Automation. Piscataway,N J:IEEE, 2010: 5281-5288. |
| [4] | 付怀达. 基于IMU的船舶纵横摇及升沉信息测量技术研究[D]. 镇江:江苏科技大学机械工程学院, 2021. |
| Fu Huai-da. Research on information measurement technology of ship pitch roll and heave based on IMU[D]. Zhenjiang: School of Mechanical Engineering, Jiangsu University of Science and Technology, 2021. | |
| [5] | 陈远明, 叶家玮, 宋鑫. 波浪运动补偿稳定平台系统的设计与建模[J]. 机床与液压, 2007,35(10): 115-117, 170. |
| Chen Yuan-ming, Ye Jia-wei, Song Xin. Design and modeling of a wave motion compensating stable platform system[J].Machine Tool and Hydraulic, 2007,35(10): 115-117, 170. | |
| [6] | 王守平. 外军海上补给装备发展趋势[J]. 航海, 2007(4): 26-27. |
| Wang Shou-ping. The development trend of foreign naval supply equipment[J]. Navigation, 2007(4): 26-27. | |
| [7] | Henriksen V W, Røine A G, Skjong E,et al. Three-axis motion compensated crane head control[J]. IFAC-Papers OnLine, 2016, 49(23): 159-166. |
| [8] | Harib K, Srinivasan K. Kinematic and dynamic analysis of stewart platform-based machine tool structures[J]. Robotica, 2003, 21(5): 541-554. |
| [9] | 黎锐. 船用吊运机械臂工况模拟与运动补偿控制研究[D]. 长春:吉林大学机械与航空航天工程学院, 2019. |
| Li Rui. Research on ship motion simulation and mechanical arm lifting motion compensation control[D]. Changchun: School of Mechanical and Aerospace Engineering, Jilin University, 2019. | |
| [10] | Suzuki T. Attitude-estimation-free GNSS and IMU integration[J]. IEEE Robotics and Automation Letters, 2024, 9(2): 1090-1097. |
| [11] | Liu X K, Wen W S, Hsu L T. GLIO: Tightly-coupled GNSS/LIDAR/IMU integration for continuous and drift-free state estimation of intelligent vehicles in urban areas[J].IEEE Transactions on Intelligent Vehicles, 2024,9(1): 142-144. |
| [12] | Akbari A, Rahemi F, Khosrowjerdi M J, et al. Roll and pitch estimation from IMU data using an LPV H∞ filter[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: No.9511110. |
| [13] | del Pizzo S, Gaglione S, Angrisano A, et al. Reliable vessel attitude estimation by wide angle camera[J]. Measurement, 2018, 127: 314-324. |
| [14] | 黄伟, 田明, 冯进良, 等. 基于模糊卡尔曼滤波的姿态估计[J]. 长春理工大学学报:自然科学版, 2023, 46(2): 120-127. |
| Huang Wei, Tian Ming, Feng Jin-liang, et al. Pose estimation based on fuzzy Kalman filtering[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2023, 46 (2): 120-127. | |
| [15] | Godhaven J M. Adaptive tuning of heave filter in motion sensor[C]∥Proceedings of the IEEE Oceanic Engineering Society, OCEANS' 98.Piscataway, N J:IEEE, 1998: 174-178. |
| [16] | 严恭敏, 苏幸君, 翁浚, 等. 基于惯导和无时延滤波器的舰船升沉测量[J]. 导航定位学报, 2016, 4(2): 91-93. |
| Yan Gong-min, Su Xing-jun, Weng Jun, et al. Measurement of ships heave motion based on INS and zero-phase-delay digital filter[J]. Journal of Navigation and Positioning, 2016, 4 (2): 91-93. | |
| [17] | 卢道华, 付怀达, 王佳, 等. 基于IMU与UKF的船舶升沉运动信息测量方法[J]. 北京航空航天大学学报, 2021, 47(7): 1323-1331. |
| Lu Dao-hua, Fu Huai-da, Wang Jia, et al. Measurement method of ship's heave motion information based on IMU and UKF algorithm[J]. Journal of Beihang University, 2021, 47 (7): 1323-1331. | |
| [18] | 马建明, 何景峰, 熊海国,等. 六自由度运动模拟器振动控制策略[J]. 吉林大学学报:工学版, 2010, 40(2): 511-516. |
| Ma Jian-ming, He Jing-feng, Xiong Hai-guo, et al. Vibration control strategy for six-DOF motion simulator[J]. Journal of Jilin University (Engineering and Technology Edition), 2010, 40 (2): 511-516. | |
| [19] | 刘香福. 海浪补偿模拟系统的优化设计及实验分析[D]. 长春:吉林大学机械与航空航天工程学院, 2018. |
| Liu Xiang-fu. The optimal design and experimental analysis of wave compensation simulation system[D]. Changchun: School of Mechanical and Aerospace Engineering, Jilin University, 2018. | |
| [20] | 倪涛, 黎锐, 缪海峰, 等. 船载机械臂末端位置实时补偿[J]. 吉林大学学报:工学版, 2020, 50(6): 2028-2035. |
| Ni Tao, Li Rui, Miao Hai-feng, et al. Real time compensation of the end position of shipborne robotic arms[J] Journal of Jilin University (Engineering and Technology Edition), 2020, 50(6): 2028-2035. | |
| [21] | 陶幸. 基于IMU的人体动作捕捉方法研究[D]. 南京:南京邮电大学电子信息学院, 2022. |
| Tao Xing. Research on human motion capture method based on IMU[D]. Nanjing: School of Electronic Information, Nanjing University of Posts and Telecommunications, 2022. | |
| [22] | 廖坤男, 郭玉英. 基于改进自适应卡尔曼滤波的姿态解算方法研究[J]. 制造业自动化, 2023, 45(6): 154-159. |
| Liao Kun-nan, Guo Yu-ying. An improved adaptive Kalman filter based attitude estimation algorithm[J]. Manufacturing Automation, 2023, 45 (6): 154-159. | |
| [23] | 余义, 章政. 单球驱动自平衡机器人的互补滤波姿态解算[J]. 计算机工程与设计, 2019, 40(4): 969-975. |
| Yu Yi, Zhang Zheng. Complementary filtering pose solution for a single ball driven self balancing robot[J]. Computer Engineering and Design, 2019, 40 (4): 969-975. | |
| [24] | Wampler C W. Forward displacement analysis of general six-in-parallel SPS (Stewart) platform manipulators using soma coordinates[J]. Mechanism and Machine Theory, 1996, 31(3): 331-337. |
| [25] | 邸瑛琳. 基于惯性导航的升沉测量系统研究[D]. 哈尔滨:哈尔滨工业大学航天学院, 2020. |
| Di Ying-lin. Research on heave measurement system based on inertial navigation[D]. Harbin: School of Aerospace Science, Harbin Institute of Technology, 2020. | |
| [26] | 黄荣. 基于惯性测量和数字滤波的舰船升沉运动计算方法研究[D]. 南京:东南大学仪器科学与工程学院, 2019. |
| Huang Rong. Research on calculation method of ship heave motion based on inertial measurement and digital filtering[D]. Nanjing: School of Instrument Science and Engineering, Southeast University, 2019. | |
| [27] | 陈琦, 李格伦, 李智刚. 用于船舶升沉运动估算的自适应数字滤波器[J]. 中国惯性技术学报, 2018, 26(4): 421-427. |
| Chen Qi, Li Ge-lun, Li Zhi-gang. Adaptive digital filter for vessel's heave motion estimation[J].Journal of Chinese Inertial Technology, 2018, 26 (4): 421-427. |
| [1] | 孙鹏远,陈国栋,张慧峰,陈伟轩,刘帅. 基于自适应观测器的氢内燃机排气流量估计[J]. 吉林大学学报(工学版), 2025, 55(9): 2837-2846. |
| [2] | 孙天骏,杨惠喆,蔡荣贵,冯嘉仪,冉锐,刘斌. 面向纯电动汽车自适应巡航系统的人性化起停控制策略[J]. 吉林大学学报(工学版), 2025, 55(9): 2847-2857. |
| [3] | 赵俊武,曲婷,胡云峰. 基于自适应采样的智能车辆轨迹规划方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2802-2816. |
| [4] | 王立勇,郑存金,张金乐,李乐. 基于局部自适应带宽扩散核密度估计的载荷外推[J]. 吉林大学学报(工学版), 2025, 55(8): 2511-2519. |
| [5] | 高金武,孙少龙,王舜尧,高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2475-2486. |
| [6] | 张连连,郭伟,刘锋. 软件定义物联网中多源异构数据混合属性特征检测[J]. 吉林大学学报(工学版), 2025, 55(8): 2746-2752. |
| [7] | 艾青林,刘元宵,杨佳豪. 基于MFF-STDC网络的室外复杂环境小目标语义分割方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2681-2692. |
| [8] | 张宇飞,王丽敏,赵建平,贾智尧,李明洋. 基于中心选择大逃杀优化算法的机器人逆运动学求解[J]. 吉林大学学报(工学版), 2025, 55(8): 2703-2710. |
| [9] | 齐晓亮,陈海鹏,石泽男,王守佳. 基于改进PositionRank算法的高校教师自我评价关键词提取方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2753-2760. |
| [10] | 袁平,蔡亚夫,戴理朝,董必钦,王磊. 基于锈损单元畸变控制的结构3D荷载路径拓扑搜寻方法[J]. 吉林大学学报(工学版), 2025, 55(7): 2212-2222. |
| [11] | 文斌,彭顺,杨超,沈艳军,李辉. 多深度自适应融合去雾生成网络[J]. 吉林大学学报(工学版), 2025, 55(6): 2103-2113. |
| [12] | 赵男男,金凤,丁宏钰. 基于权重优化AF的非线性主动噪声控制算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1722-1727. |
| [13] | 张河山,范梦伟,谭鑫,郑展骥,寇立明,徐进. 基于改进YOLOX的无人机航拍图像密集小目标车辆检测[J]. 吉林大学学报(工学版), 2025, 55(4): 1307-1318. |
| [14] | 刘琳,任彦君,沈童,殷国栋,章友京. 融合整车质量估计的电动汽车坡道识别[J]. 吉林大学学报(工学版), 2025, 55(3): 846-856. |
| [15] | 程德强,刘规,寇旗旗,张剑英,江鹤. 基于自适应大核注意力的轻量级图像超分辨率网络[J]. 吉林大学学报(工学版), 2025, 55(3): 1015-1027. |
|
||