吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (3): 846-856.doi: 10.13229/j.cnki.jdxbgxb.20230625
融合整车质量估计的电动汽车坡道识别
刘琳1( ),任彦君1,2,沈童1,殷国栋2(),章友京2
),任彦君1,2,沈童1,殷国栋2(),章友京2
- 1.东南大学 机械工程学院,南京 211189
2.科大国创极星(芜湖)科技有限公司,安徽 芜湖 241000
Electric vehicle ramp recognition based on fusion of vehicle mass estimation
Lin LIU1(),Yan-jun REN1,2,Tong SHEN1,Guo-dong YIN2(),You-jing ZHANG2
- 1.Department of Mechanical Engineering,Southeast University,Nanjing 211189,China
2.Keda Guohuang Jixing (Wuhu) Technology Co. ,Ltd. ,Wuhu 241000,China
摘要:
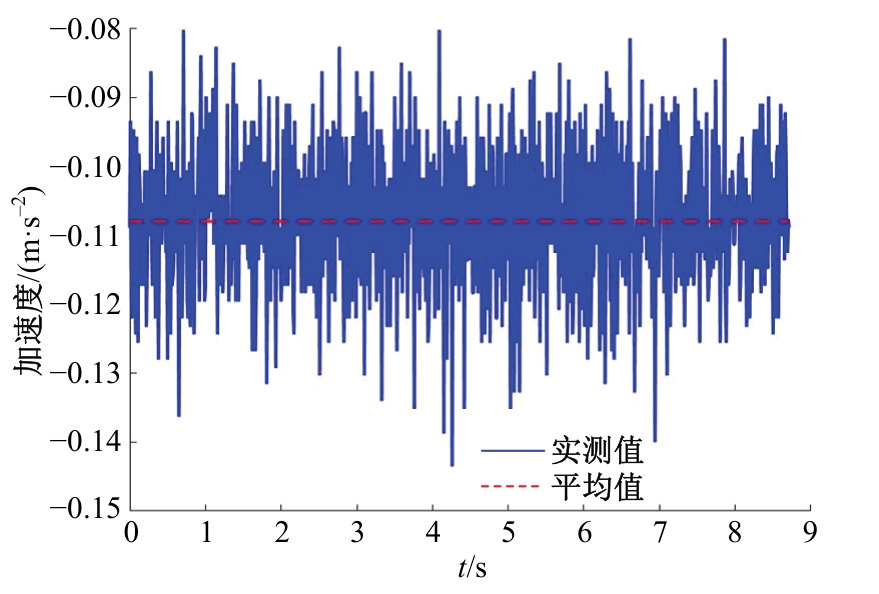
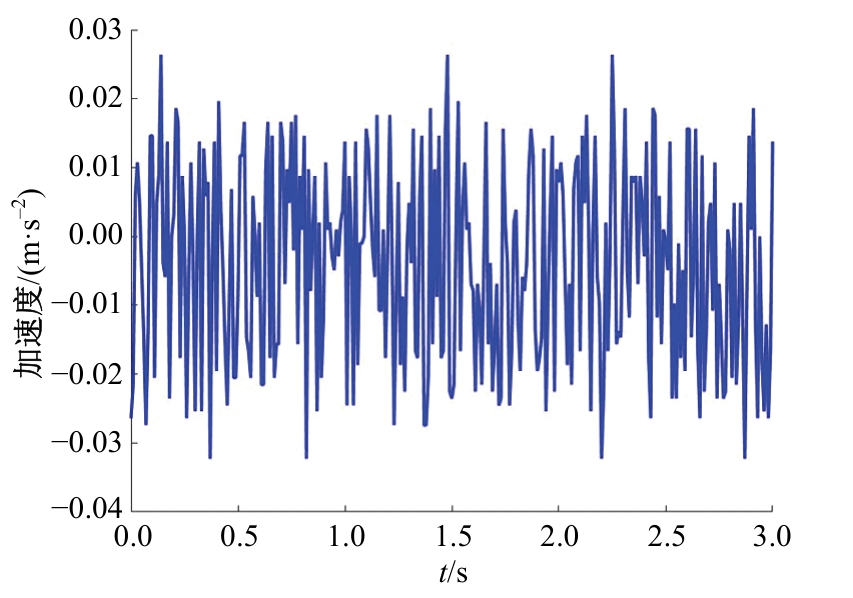
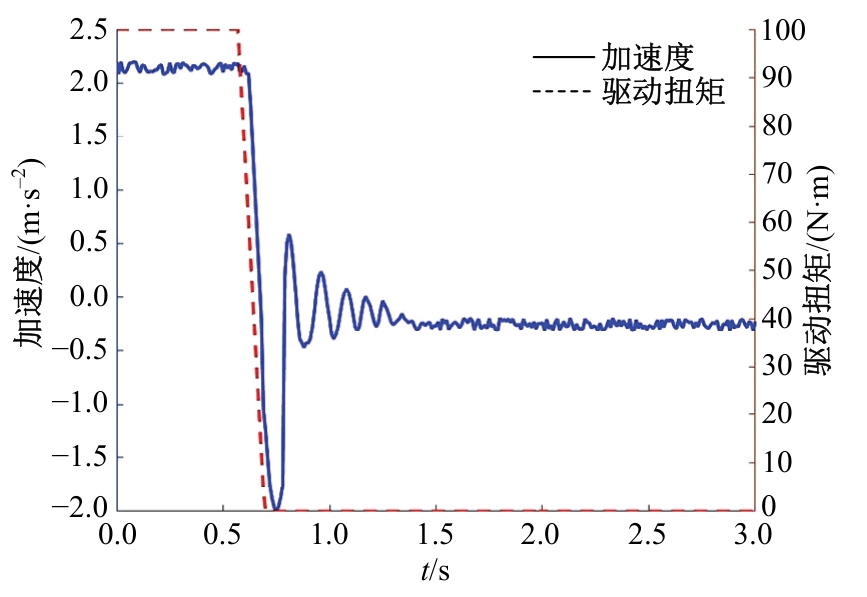
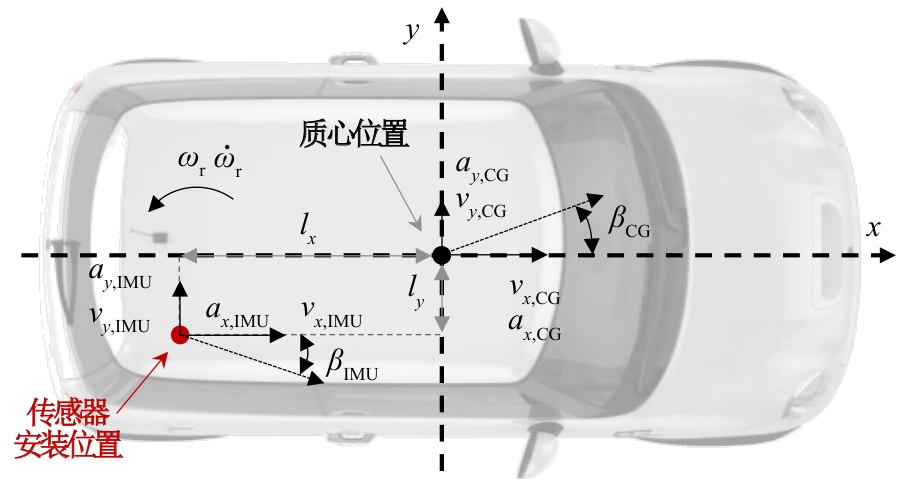
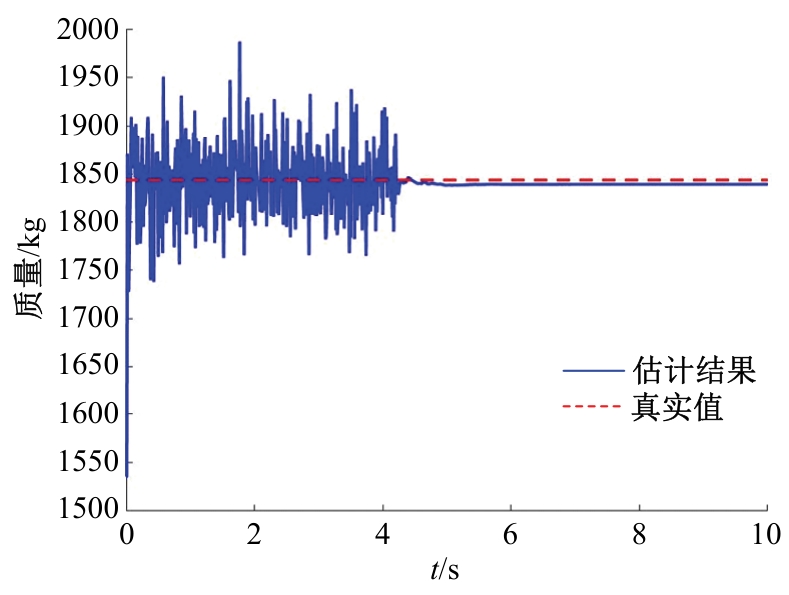
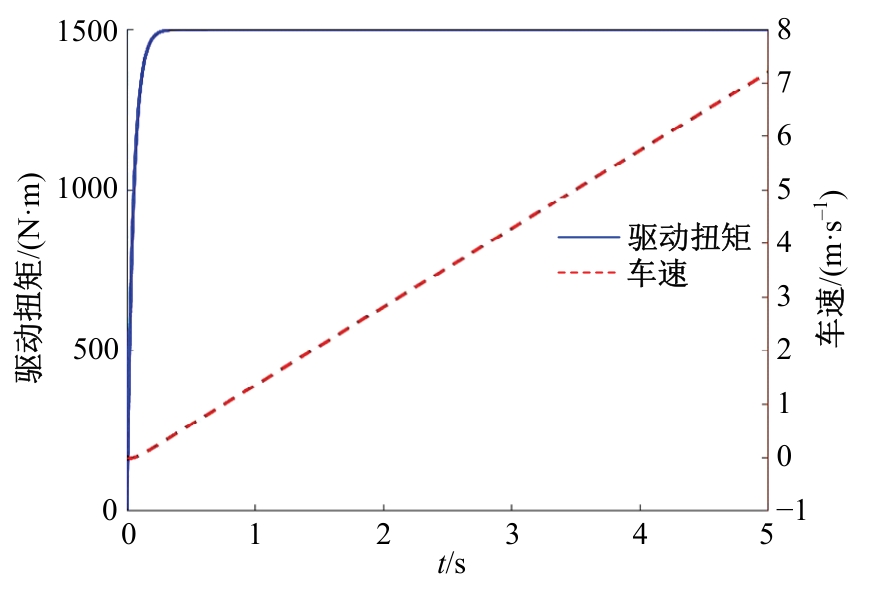
针对现有坡道识别算法工况适应性差,无法满足量产车应用要求等问题,提出了一种融合整车质量估计的电动汽车坡道识别方法。建立了车辆纵向动力学模型,分析了加速度传感器在实际车载条件下的信号特征。构建了带遗忘因子的最小二乘整车质量估计策略,实现了在起步工况下直接获取整车质量。针对静态驻车和动态行车两种驾驶场景分别设计了坡道识别算法,静态场景下采用滤波锁存策略应对车内活动等干扰因素,动态场景下设计了基于量测噪声自适应的Kalman滤波算法,实现了针对坡道的动力学观测和运动学观测的融合估计。通过Simulink-Carsim联合仿真验证了该方法的有效性。最后,在奇瑞新能源的量产纯电动汽车平台和域控制器上完成了实车测试,道路实验结果表明:该方法得到的整车质量估计误差在±10 kg以内,坡道静态误差小于0.001 rad,动态误差在0.005 rad以内,估计准确性和稳定性大幅提升,有效保障了电动汽车智能驾驶功能的环境适应性。
中图分类号:
- U461.72


| 1 | 林楠, 施树明, 马力, 等. 含坡度变化率信息的道路坡度估计[J]. 吉林大学学报: 工学版, 2016, 46(6):1845-1850. |
| Lin Nan, Shi Shu-ming, Ma Li, et al. Road slope estimation with slope change rate information[J]. Journal of Jilin University (Engineering and Techgnology Edition), 2016,46(6): 1845-1850. | |
| 2 | 曾小华, 钱琦峰, 宋大凤, 等. 基于加速度校正的坡度估计算法与实现[J]. 汽车工程, 2020, 42(10):1369-1377. |
| Zeng Xiao-hua, Qian Qi-feng, Song Da-feng, et al. Slope estimation algorithm and implementation based on acceleration correction[J]. Automotive Engineering, 2020, 42 (10):1369-1377. | |
| 3 | Li E H, He W P, Yu H L. Model-based embedded road grade estimation using quaternion unscented Kalman filter[J]. IEEE Transactions on Vehicular Technology, 2022,71(4):3704-3714. |
| 4 | 雍文亮, 管欣, 王博, 等. 基于多传感数据融合滤波的纵向坡度识别算法[J]. 机械工程学报, 2018,54(14): 116-124. |
| Yong Wen-liang, Guan Xin, Wang Bo, et al. Longitudinal slope recognition algorithm based on multi-sensor data fusion filtering[J]. Journal of Mechanical Engineering, 2018,54(14): 116-124. | |
| 5 | Guo J W, He C, Li J Q, et al. Slope estimation method of electric vehicles based on improved sage-husa adaptive Kalman filter[J]. Energies, 2022, 15(11): No.4126. |
| 6 | 褚文博, 罗禹贡, 罗剑, 等. 电驱动车辆的整车质量与路面坡度估计[J].清华大学学报: 自然科学版, 2014, 54(6): 724-728. |
| Chu Wen-bo, Luo Yu-gong, Luo Jian, et al. Estimation of Vehicle mass and road slope for electric drive vehicles[J]. Journal of Tsinghua University (Natural Science Edition), 2014, 54(6):724-728. | |
| 7 | Li B, Zhang J, Du H, et al. Two-layer structure based adaptive estimation for vehicle mass and road slope under longitudinal motion[J]. Measurement, 2017, 95: 439-455. |
| 8 | Li X, Ma J, Zhao X, et al. Intelligent Two-step estimation approach for vehicle mass and road grade[J]. IEEE Access, 2020, 8:218853-218862. |
| 9 | 孙恩鑫, 殷玉明, 辛喆, 等. 微小加速度下汽车质量-道路坡度自适应估计[J]. 清华大学学报:自然科学版, 2022, 62(1): 125-132. |
| Sun En-xin, Yin Yu-ming, Xin Zhe, et al. Adaptive estimation of vehicle mass road slope under small acceleration[J]. Journal of Tsinghua University (Natural Science Edition), 2022, 62(1): 125-132. | |
| 10 | 郝胜强, 罗培培, 席军强. 基于稳态卡尔曼滤波的车辆质量与道路坡度估计[J]. 汽车工程, 2018, 40(9): 1062-1067, 1075. |
| Hao Sheng-qiang, Luo Pei-pei, Xi Jun-qiang. Vehicle mass and road slope estimation based on steady-state Kalman filtering[J] Automotive Engineering, 2018, 40(9):1062-1067, 1075. | |
| 11 | Ritter A, Widmer F, Vetterli B, et al. Optimization-based online estimation of vehicle mass and road grade: theoretical analysis and experimental validation[J]. Mechatronics, 2021, 80: No.102663. |
| 12 | 王凡勋, 殷国栋, 沈童, 等. 四轮驱动电动汽车质心侧偏角与轮胎侧向力非线性鲁棒融合估计[J]. 中国机械工程,2022(22): 2673-2683. |
| Wang Fan-xun, Yin Guo-dong, Shen Tong, et al. Nonlinear robust fusion estimation of center of mass slip angle and tire lateral force for four wheel drive electric vehicles[J]. China Mechanical Engineering,2022(22): 2673-2683. | |
| 13 | 任彦君, 殷国栋, 沙文瀚, 等. 基于运动学信息融合的四轮驱动汽车纵向车速自适应估计方法[J]. 机械工程学报, 2021,57(8): 184-194. |
| Ren Yan-jun, Yin Guo-dong, Sha Wen-han, et al. Adaptive estimation method for longitudinal speed of four-wheel drive vehicles based on kinematic information fusion[J]. Journal of Mechanical Engineering, 2021,57(8): 184-194. |
| [1] | 李艳波,柳柏松,姚博彬,陈俊硕,渠开发,武奇生,曹洁宁. 考虑路网随机特性的高速公路换电站选址[J]. 吉林大学学报(工学版), 2023, 53(5): 1364-1371. |
| [2] | 葛动元,向文江,李健,刘恩辰,姚锡凡. 基于机器视觉的电动汽车充电自动定位方法[J]. 吉林大学学报(工学版), 2023, 53(12): 3465-3471. |
| [3] | 李杰,贾长旺,成林海,赵旗. 轮毂电机电动汽车主动悬架约束状态反馈H∞控制[J]. 吉林大学学报(工学版), 2023, 53(1): 41-49. |
| [4] | 庄伟超,丁昊楠,董昊轩,殷国栋,王茜,周朝宾,徐利伟. 信号交叉口网联电动汽车自适应学习生态驾驶策略[J]. 吉林大学学报(工学版), 2023, 53(1): 82-93. |
| [5] | 刘兴涛,林思源,武骥,何耀,刘新天. 计及电池功率状态的再生制动优化策略[J]. 吉林大学学报(工学版), 2022, 52(12): 2796-2805. |
| [6] | 李翠玉,胡雅梦,康亚伟,张德良. 应用自适应遗传算法的电动汽车充放电协同调度[J]. 吉林大学学报(工学版), 2022, 52(11): 2508-2513. |
| [7] | 张必达,闫强,张琳,张海瑞. 基于实时交通信息的电动汽车充换电路径规划方法[J]. 吉林大学学报(工学版), 2022, 52(10): 2333-2342. |
| [8] | 赵又群,李宇昊,邓汇凡,林涛,林棻. 基于Popov超稳定性的分布式电动汽车稳定性控制[J]. 吉林大学学报(工学版), 2022, 52(10): 2225-2233. |
| [9] | 李明,薛庆峰,张可欣,吕然,韦长华. 电动汽车热泵空调系统性能分析[J]. 吉林大学学报(工学版), 2021, 51(6): 1943-1952. |
| [10] | 李浩,陈浩. 考虑充电排队时间的电动汽车混合交通路网均衡[J]. 吉林大学学报(工学版), 2021, 51(5): 1684-1691. |
| [11] | 王聪,马彦,王国光. 电动汽车充电站内的实时最优功率分配[J]. 吉林大学学报(工学版), 2021, 51(4): 1490-1495. |
| [12] | 宋强,孙丹婷,章伟. 纯电动车机械式自动变速器换挡非线性建模及控制[J]. 吉林大学学报(工学版), 2021, 51(3): 810-819. |
| [13] | 马苗苗,潘军军,刘向杰. 含电动汽车的微电网模型预测负荷频率控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1644-1652. |
| [14] | 席利贺,张欣,孙传扬,王泽兴,姜涛. 增程式电动汽车自适应能量管理策略[J]. 吉林大学学报(工学版), 2018, 48(6): 1636-1644. |
| [15] | 常成,宋传学,张雅歌,邵玉龙,周放. 双馈电机驱动电动汽车变频器容量最小化[J]. 吉林大学学报(工学版), 2018, 48(6): 1629-1635. |
|
||