吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (9): 3020-3031.doi: 10.13229/j.cnki.jdxbgxb.20250381
• 计算机科学与技术 • 上一篇
融合改进A*与DWA算法的车间移动机器人路径规划
张伏1( ),韩伟东1,鲍若飞1,张亚坤1,王亚飞2,付三玲3
),韩伟东1,鲍若飞1,张亚坤1,王亚飞2,付三玲3
- 1.河南科技大学 农业装备工程学院,河南 洛阳 471003
2.江苏大学 农业工程学院,江苏 镇江 212013
3.河南科技大学 物理工程学院,河南 洛阳 471003
Path planning of workshop mobile robots integrated with improved A* and DWA algorithms
Fu ZHANG1(),Wei-dong HAN1,Ruo-fei BAO1,Ya-kun ZHANG1,Ya-fei WANG2,San-ling FU3
- 1.College of Agricultural Equipment Engineering,Henan University of Science and Technology,Luoyang 471003,China
2.College of Agricultural Engineering,Jiangsu University,Zhenjiang 212013,China
3.College of Physics Engineering,Henan University of Science and Technology,Luoyang 471003,China
摘要:
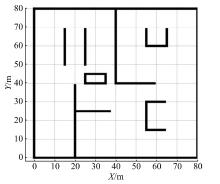
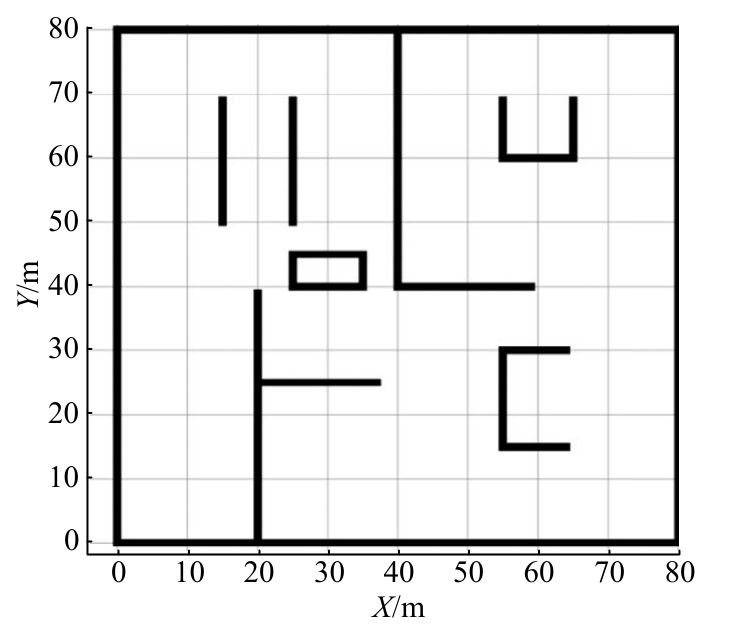
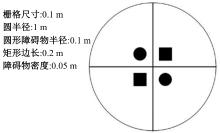
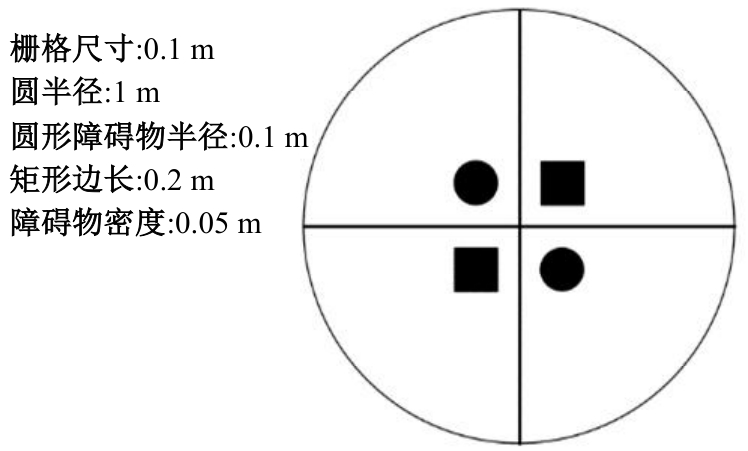
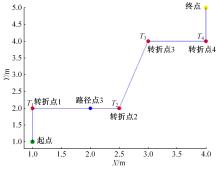
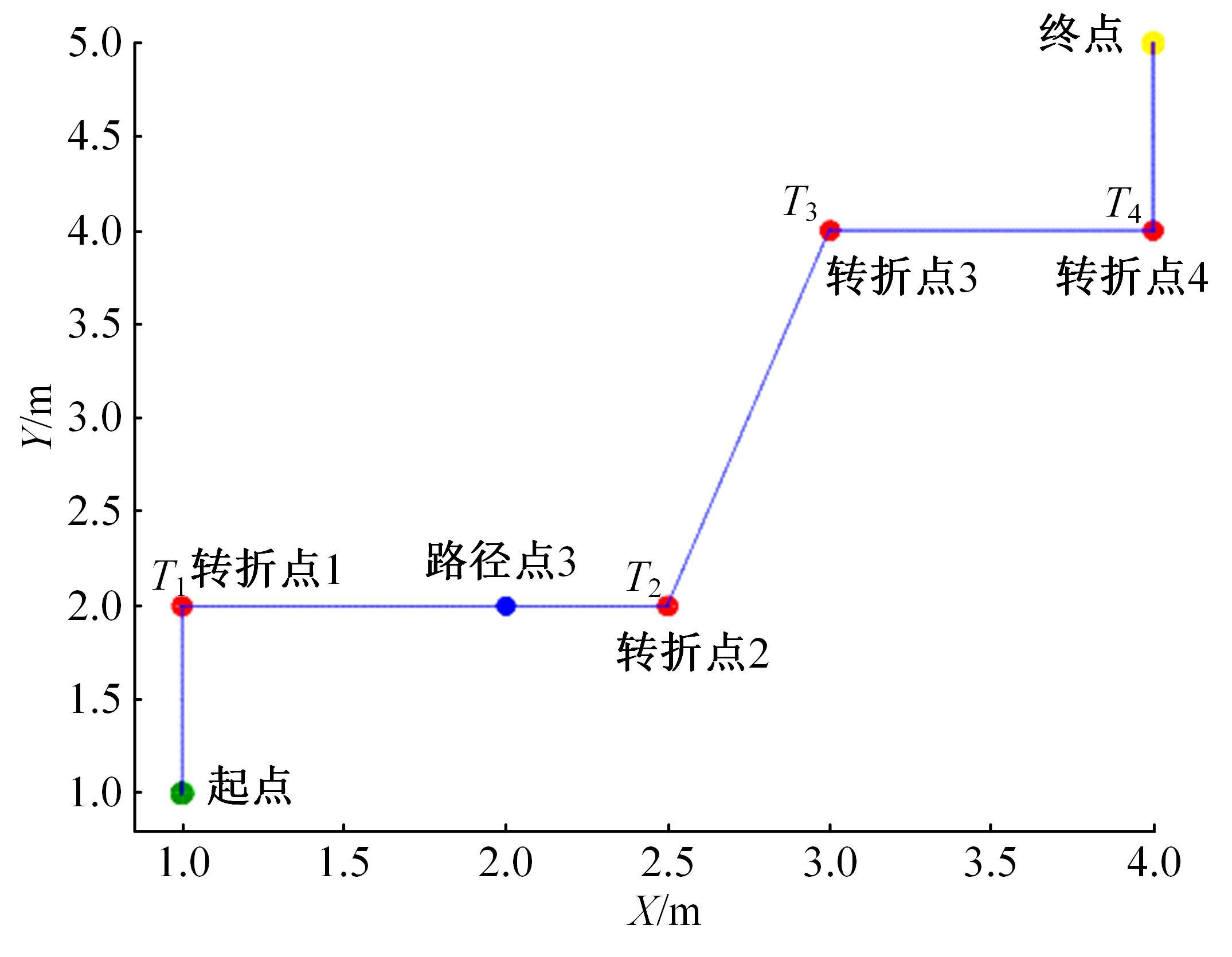
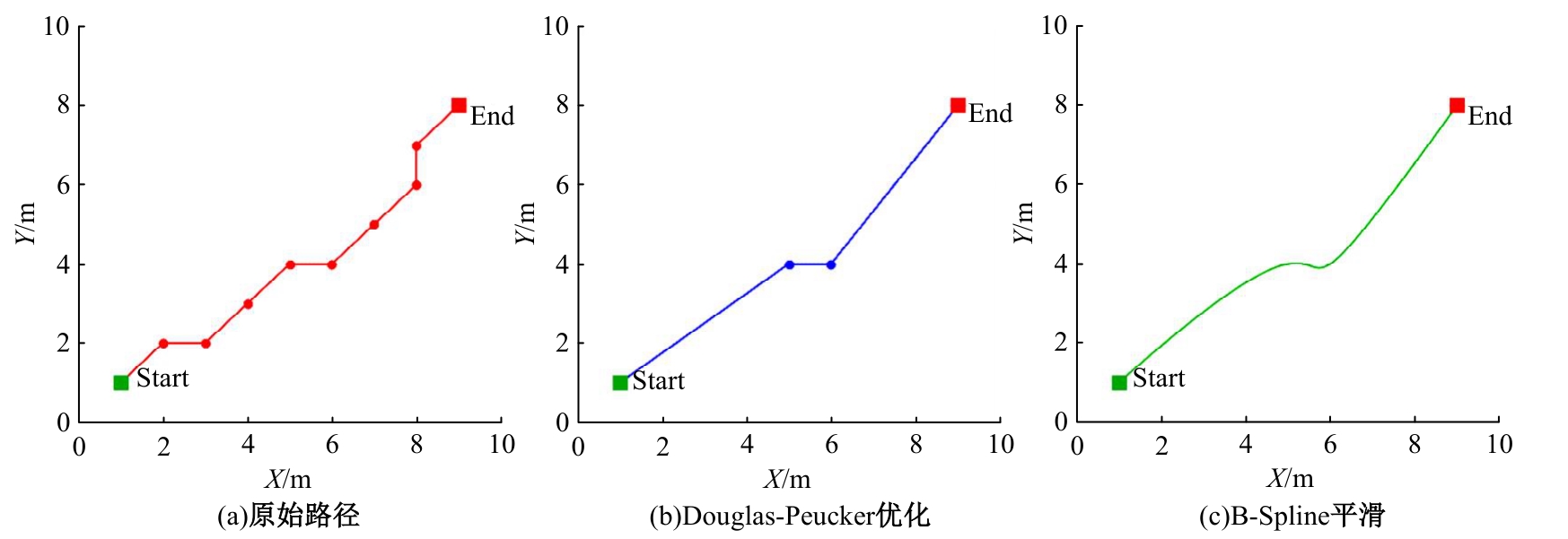
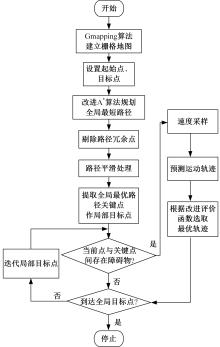
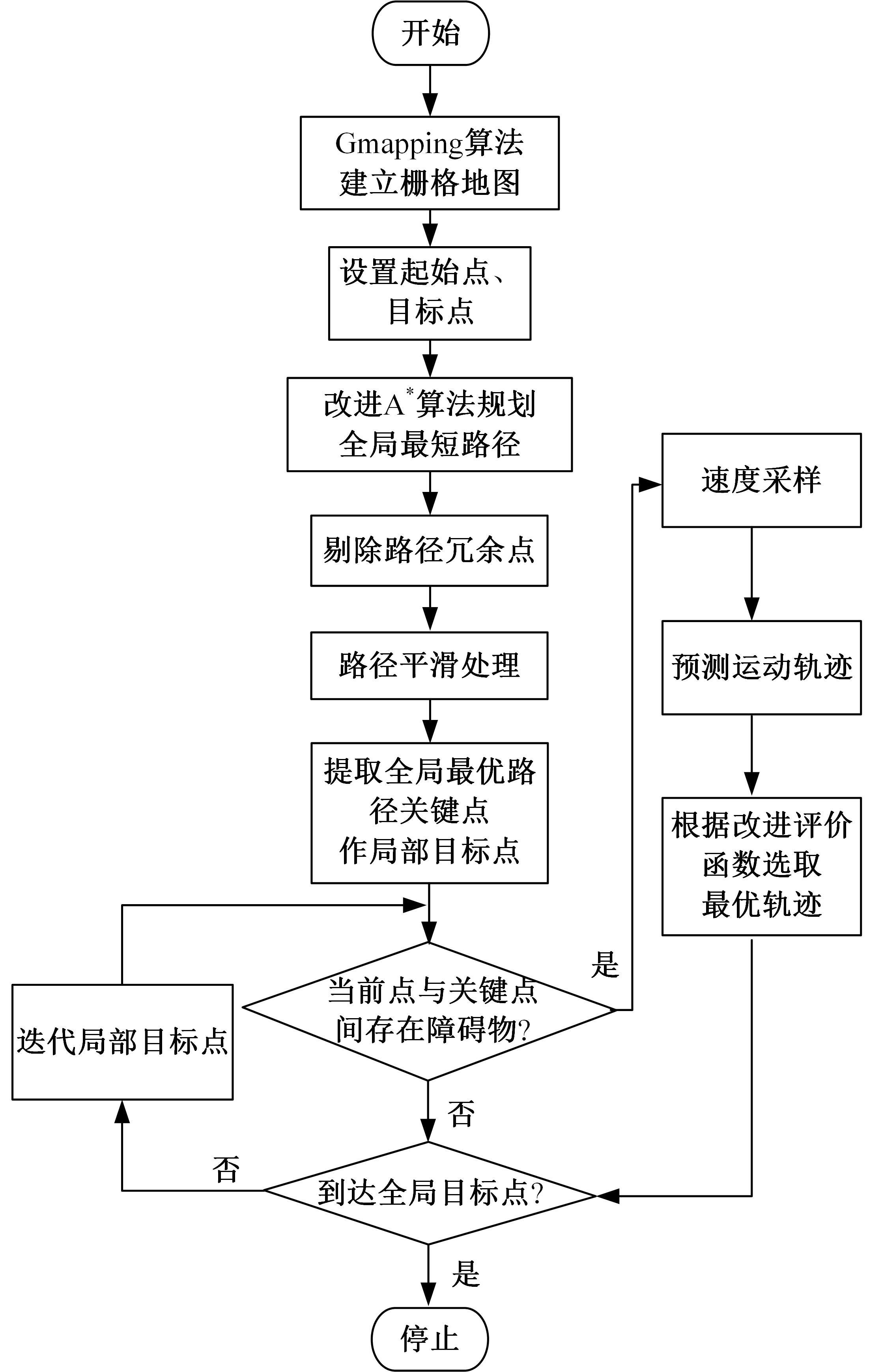
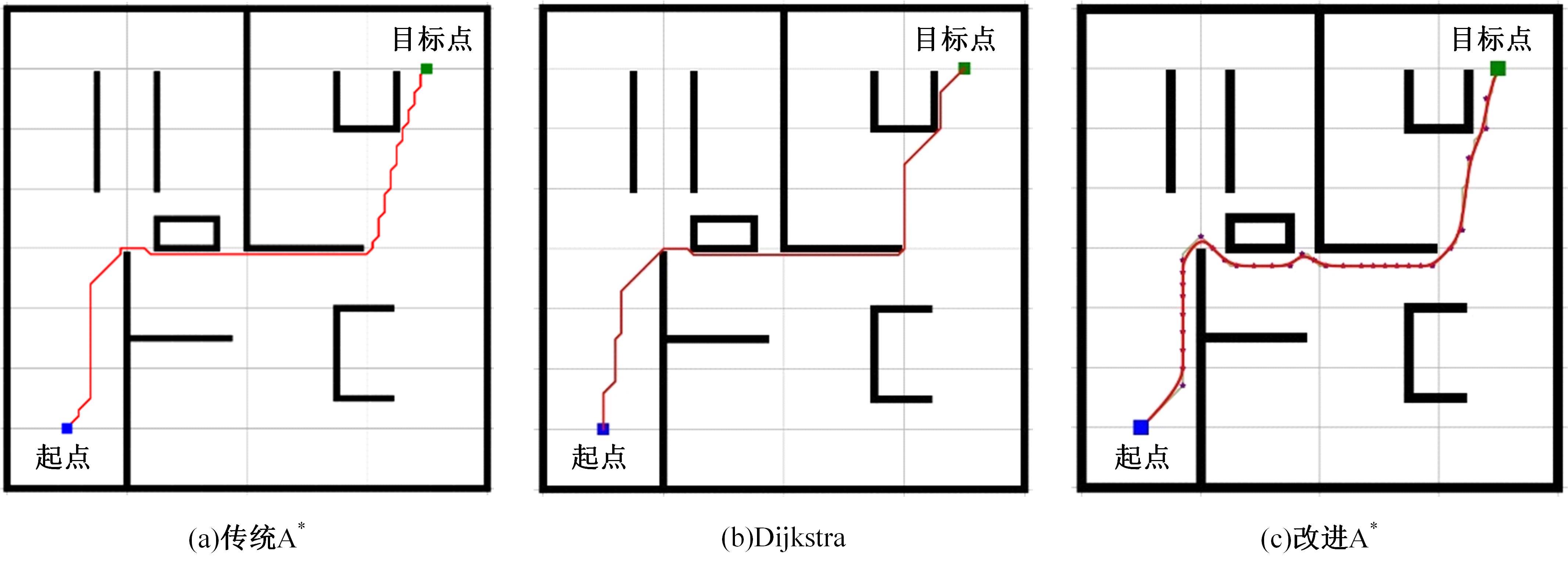
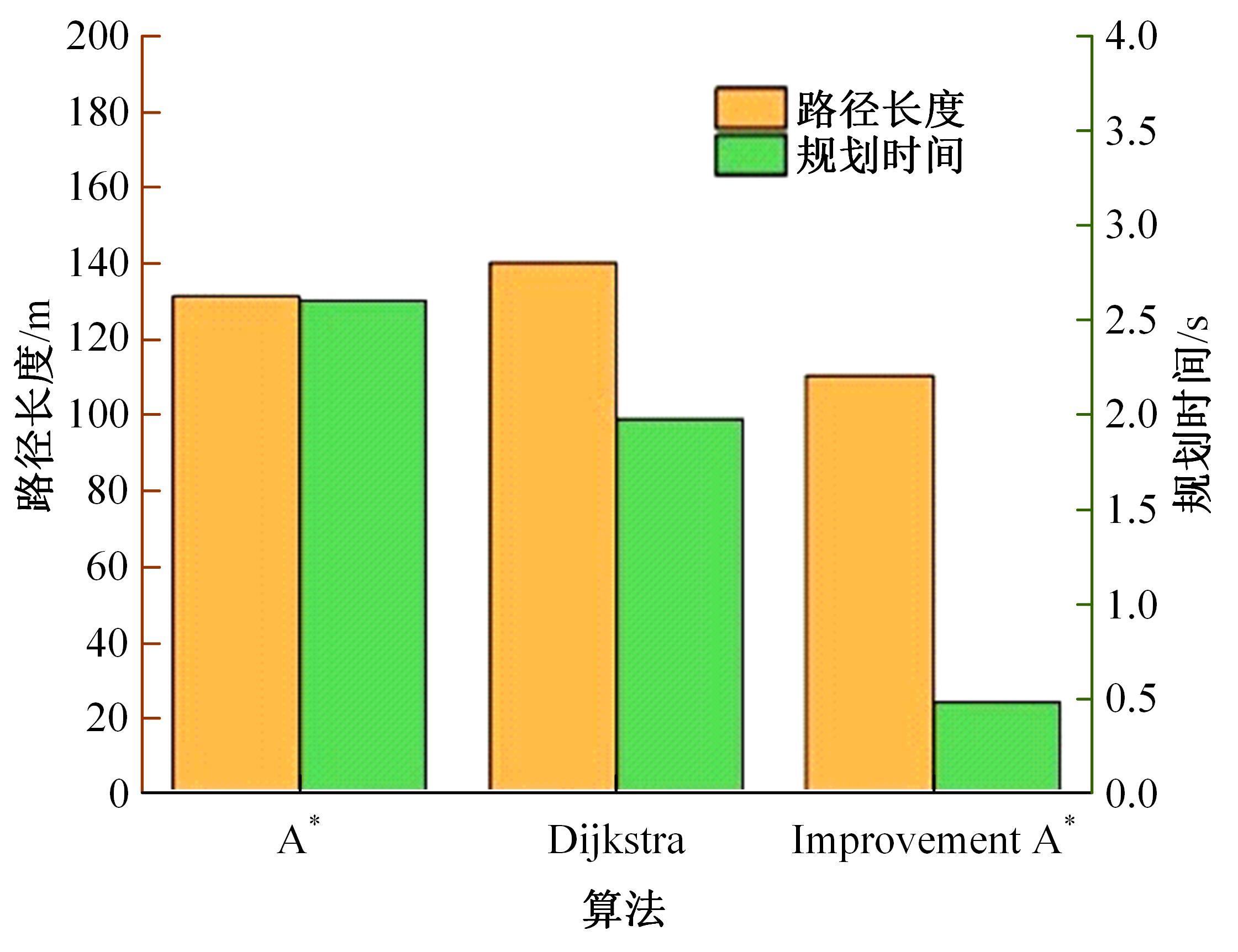
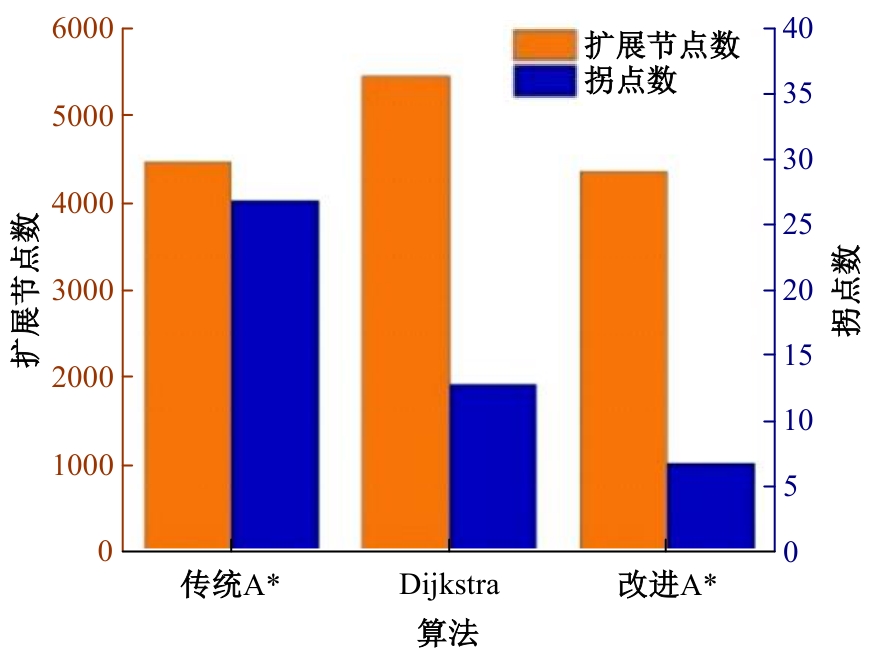
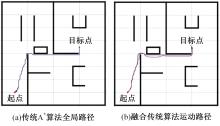
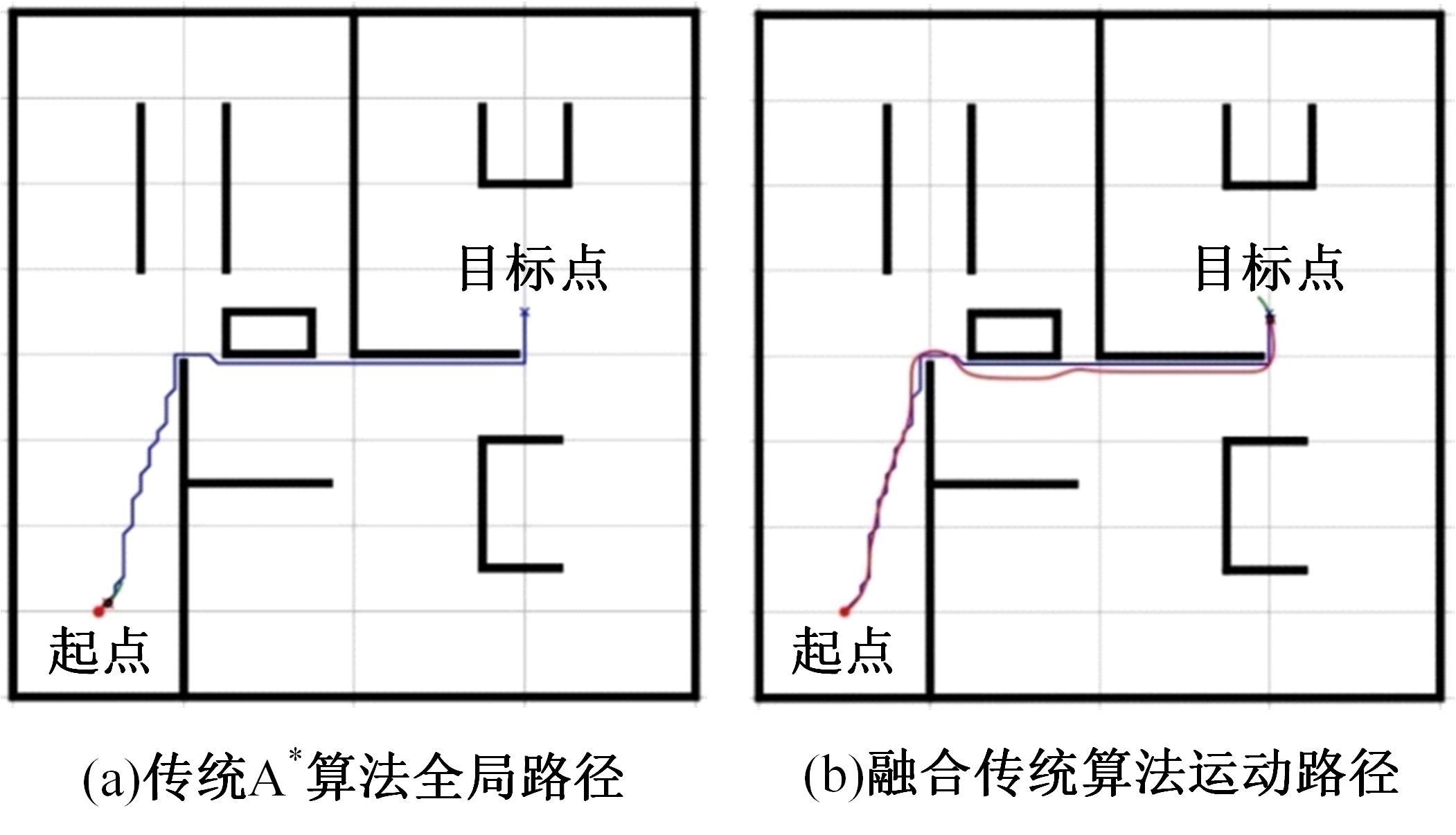
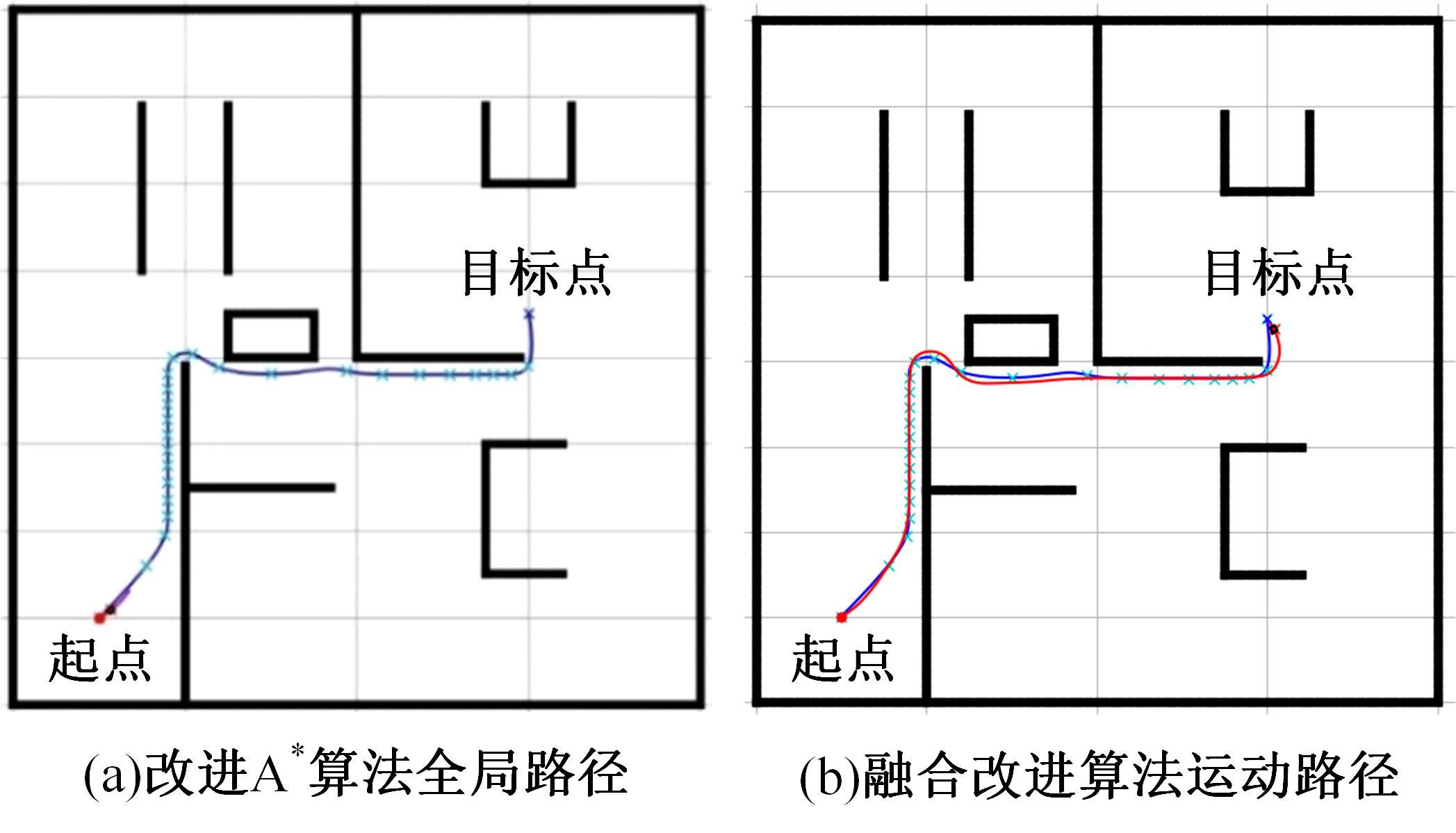
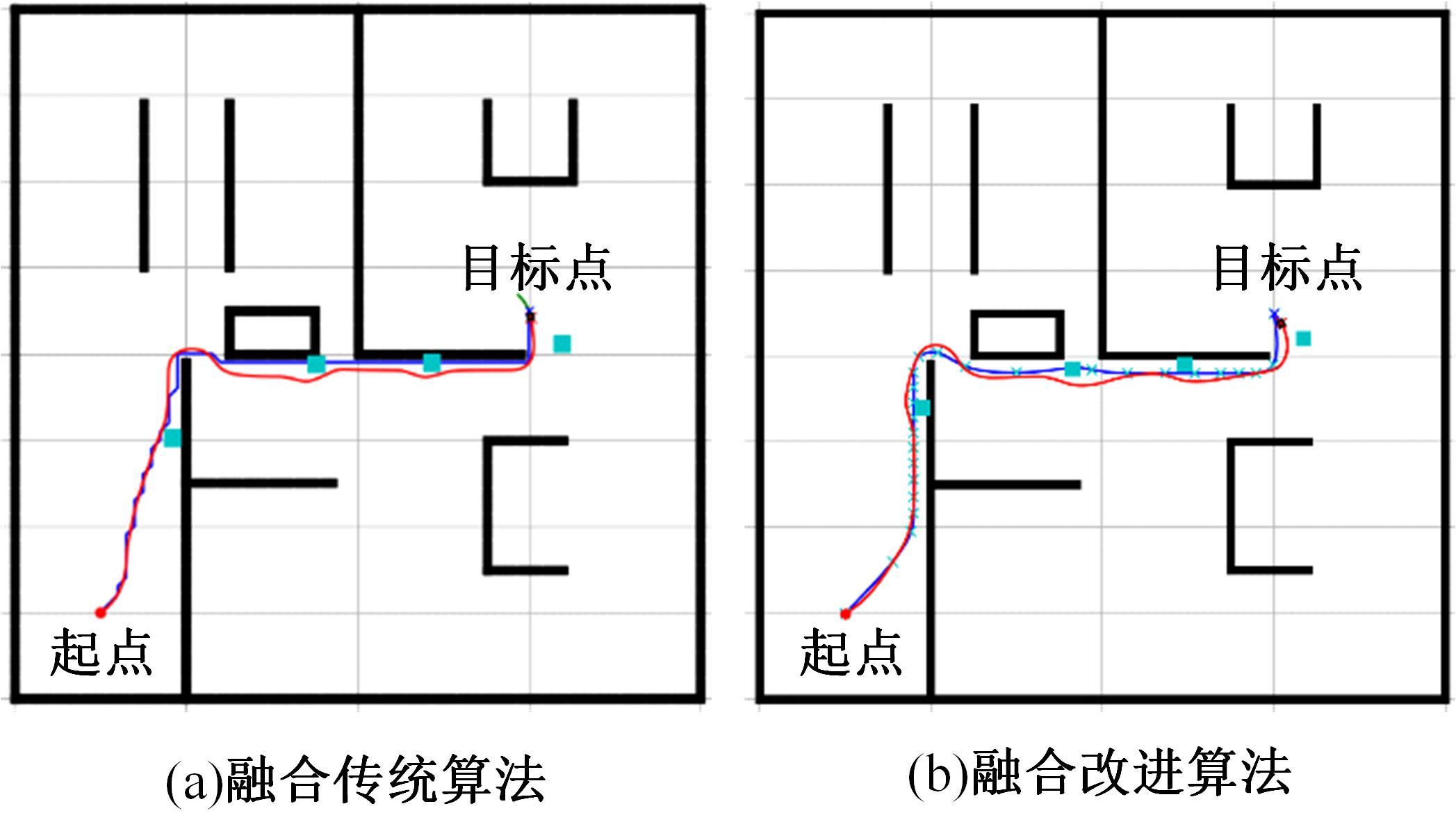
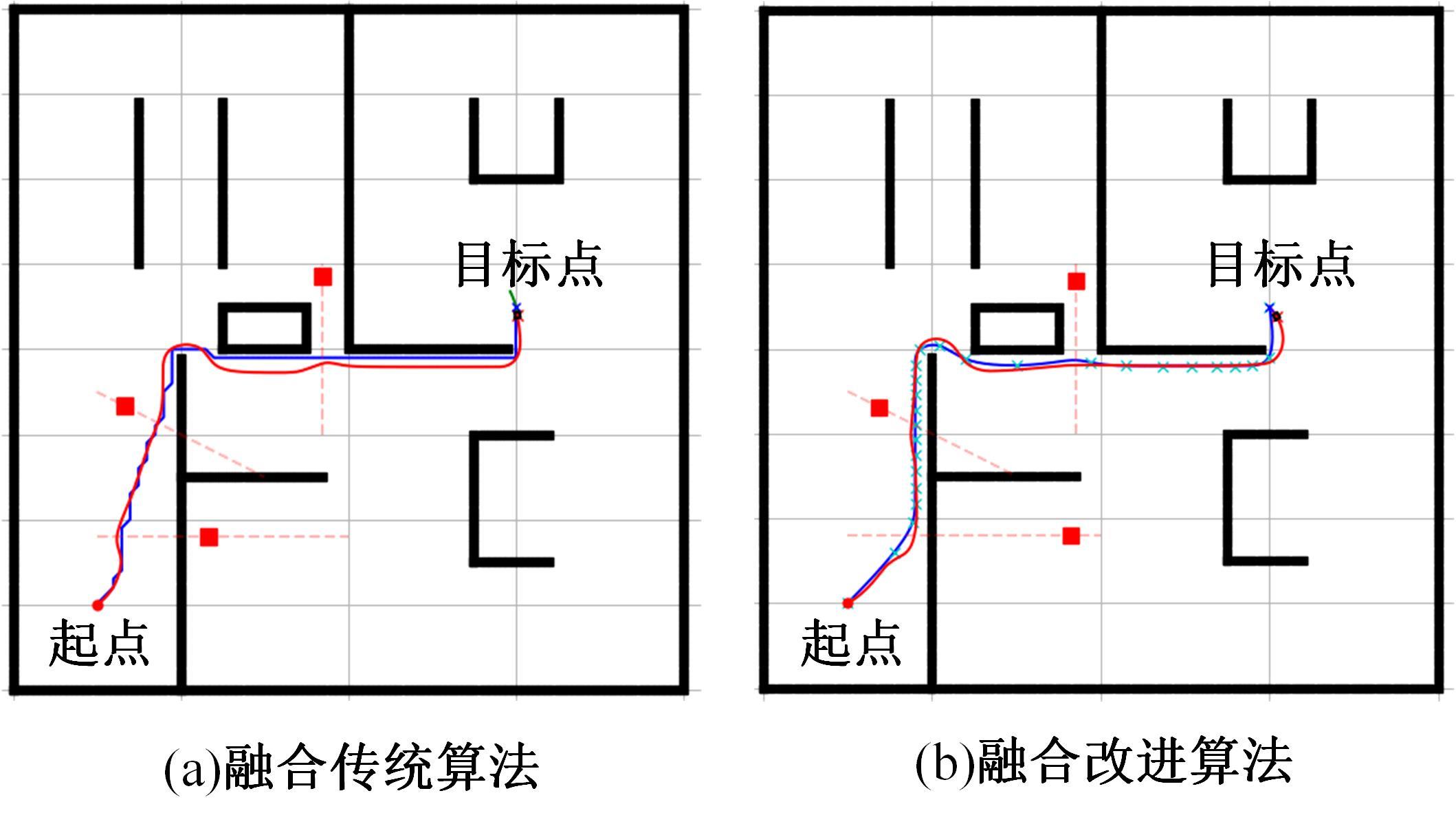
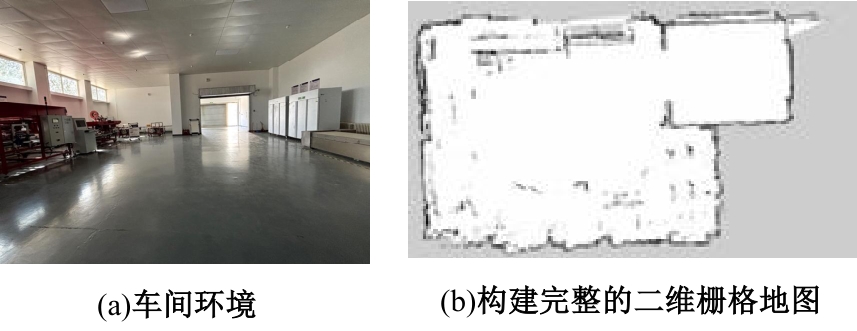
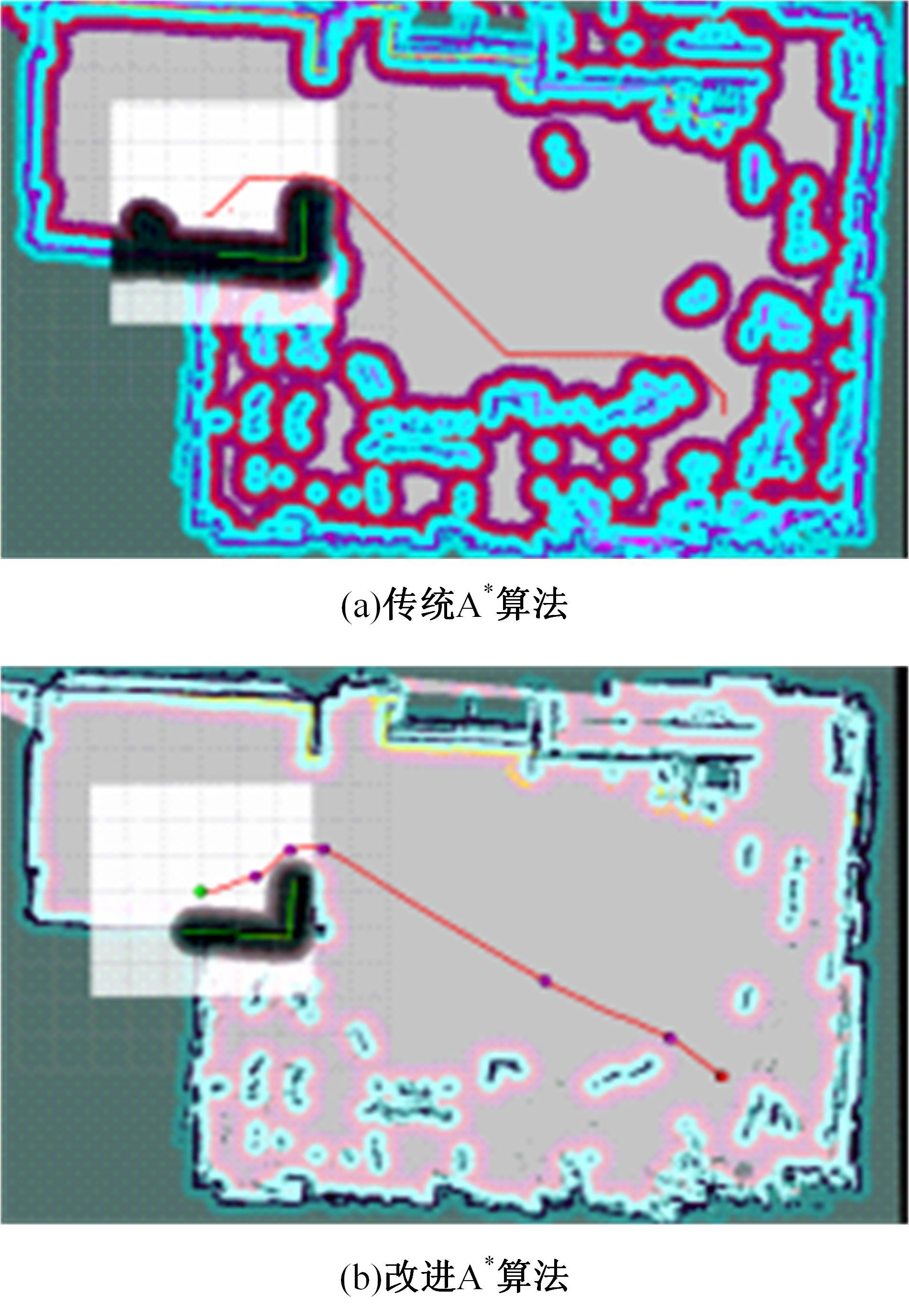
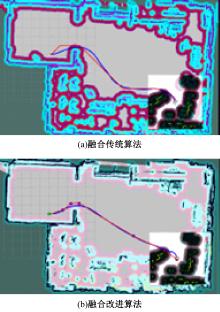
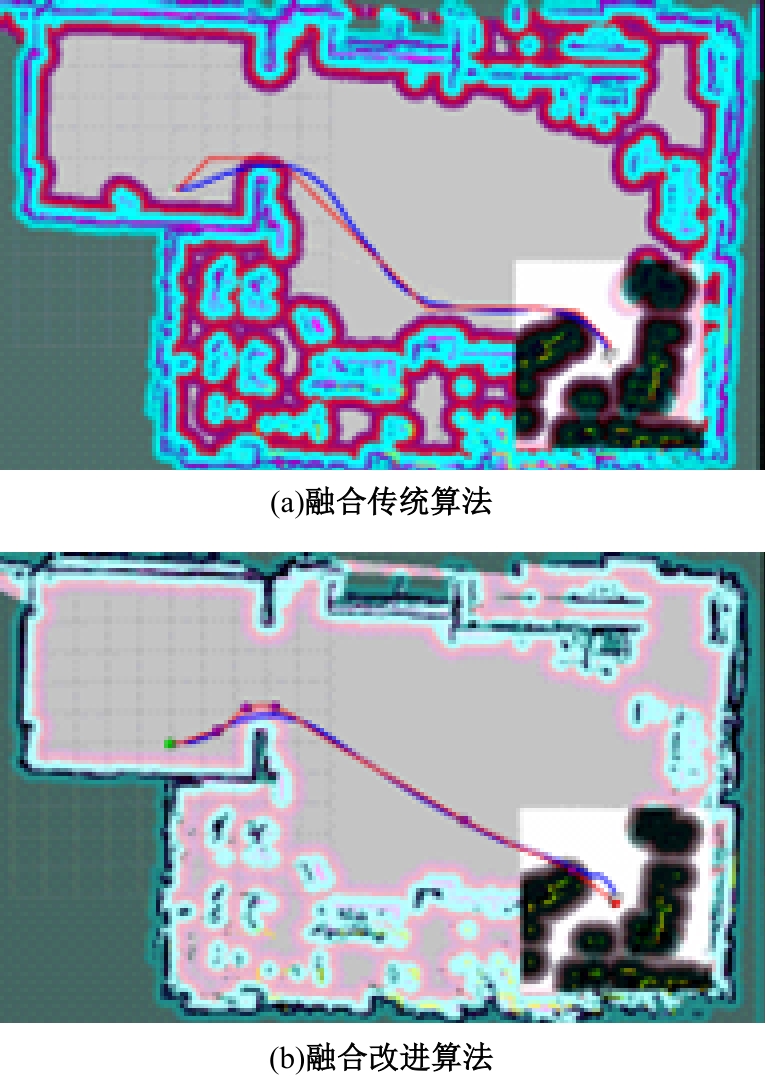
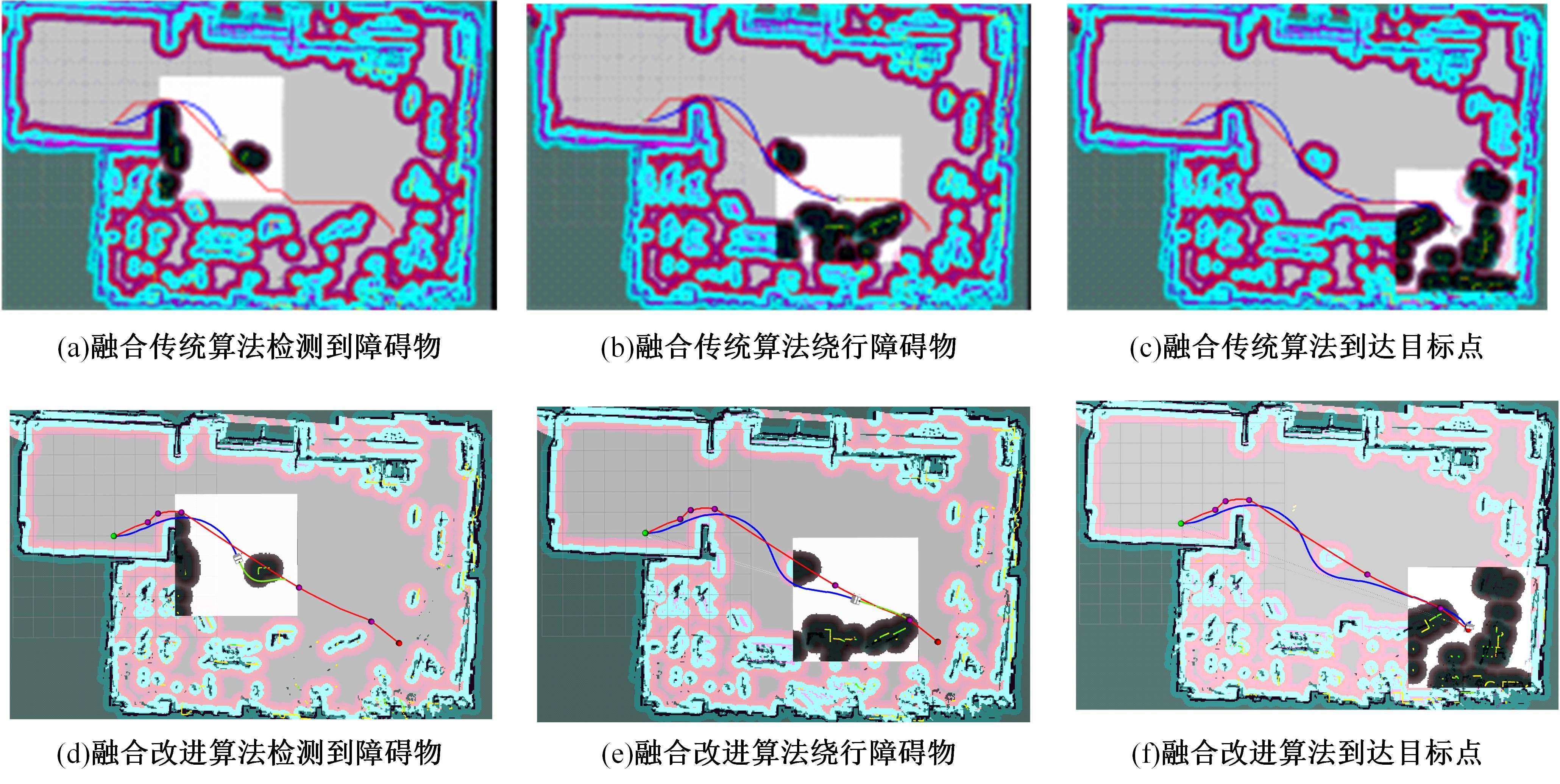
为实现复杂车间环境下移动机器人高效路径规划,提出了一种融合改进A*与DWA算法的混合路径规划方法。首先,优化全局路径规划A*算法,考虑障碍物密度、转弯次数和运动惯性因子的影响,改进启发函数;其次,引入权重因子动态调整启发函数权重,采用Douglas-Peucker算法简化路径,同时引入B-Spline算法平滑路径;最后,改进局部路径规划DWA算法,将全局最优路径关键点作为DWA算法过程的目标点,引入当前点与目标点距离、当前点与动态障碍物距离和路径跟踪代价3项评价子项,重构轨迹评价函数。仿真结果表明:相较于传统A*算法,改进A*算法在路径长度、规划时间、扩展节点数和拐点数方面分别减少15.80%、81.20%、2.30%和74.10%;在添加临时静态障碍物和动态障碍物场景中,融合改进算法的运行时间分别缩短22.02%和22.32%。试验结果表明:融合改进算法可高效规划路径且安全避开障碍物。
中图分类号:
- TP242



| [1] | 向抒林, 陈炜, 程伟, 等. 石油化工储罐区巡检机器人研究现状与展望[J]. 石油化工腐蚀与防护, 2024, 41(6): 1-8. |
| Xiang Shu-lin, Chen Wei, Cheng Wei, et al. Research status and prospect of inspection robot for petrochemical storage tank area[J]. Petrochemical Corrosion and Protection,2024, 41(6): 1-8. | |
| [2] | Zhang H J, Jiang F, Liu C K, et al. Review of autonomous path planning for planetary rovers[J]. Chinese Journal of Engineering, 2024, 46(11): 2063-2075. |
| [3] | Zhong J K, Kong D Y, Wei Y L, et al. Efficiency-optimized path planning algorithm for car-like mobile robots in bilateral constraint corridor environments[J]. Robotics and Autonomous Systems, 2025, 186: No.104923. |
| [4] | Zhang Z W, Wu L H, Zhang W Q, et al. Energy-efficient path planning for a single-load automated guided vehicle in a manufacturing workshop[J]. Computers & Industrial Engineering, 2021, 158: No.107397. |
| [5] | Katona K, Neamah H A, Korondi P. Obstacle avoidance and path planning methods for autonomous navigation of mobile robot[J]. Sensors, 2024, 24(11): No.2411. |
| [6] | 霍凤财, 迟金, 黄梓健, 等. 移动机器人路径规划算法综述[J]. 吉林大学学报: 信息科学版, 2019, 36(6): 639-647. |
| Huo Feng-cai, Chi Jin, Huang Zi-jian, et al. A review of path planning algorithms for mobile robots[J]. Journal of Jilin University (Information Science Edition), 2019, 36(6): 639-647. | |
| [7] | 姚得鑫, 伞红军, 王雅如, 等. 移动机器人路径规划中A*算法的改进研究[J]. 系统仿真学报, 2024, 36(11): 2684-2698. |
| Yao De-xin, Hong-jun San, Wang Ya-ru, et al. Research on the improvement of A* algorithm in path planning of mobile robot[J]. Journal of System Simulation, 2024, 36(11): 2684-2698. | |
| [8] | 杨姝慧, 郝子鑫, 李彬. 机器人路径规划算法研究分析与综述[J]. 齐鲁工业大学学报, 2024, 38(5): 37-46. |
| Yang Shu-hui, Hao Zi-xin, Li Bin. Research analysis and summary of robot path planning algorithm[J]. Journal of Qilu University of Technology, 2024, 38(5): 37-46. | |
| [9] | Chen H, Lin Z, Chen Z, et al. Adaptive DWA algorithm with decision tree classifier for dynamic planning in USV navigation[J]. Ocean Engineering, 2025, 321: No.120328. |
| [10] | Wang Y C, Li J L, Zhao S Q, et al. Hybrid path planning for USV with kinematic constraints and COLREGS based on improved APF-RRT and DWA[J]. Ocean Engineering, 2025, 318: No.120128. |
| [11] | 王云亮, 张赛, 吴艳娟. 基于改进A*平滑性路径规划算法研究[J]. 计算机应用与软件, 2025, 42(1): 258-263, 276. |
| Wang Yun-liang, Zhang Sai, Wu Yan-juan. Research on path planning algorithm based on improved A* smoothness[J]. Computer Applications and Software, 2025, 42(1): 258-263, 276. | |
| [12] | 张宸威, 黄平, 张国恒, 等. 基于改进A*算法的自适应路径规划研究[J]. 通信与信息技术, 2025(1): 43-45, 122. |
| Zhang Chen-wei, Huang Ping, Zhang Guo-heng, et al. Research on adaptive path planning based on improved A* algorithm[J]. Communication and Information Technology, 2025(1): 43-45, 122. | |
| [13] | Zhang J Q, Ling H J, Tang Z H, et al. Path planning of USV in confined waters based on improved A∗ and DWA fusion algorithm[J]. Ocean Engineering, 2025, 322: No.120475. |
| [14] | Wang Y C, Fu C H, Huang R Y, et al. Path planning for mobile robots in greenhouse orchards based on improved A* and fuzzy DWA algorithms[J]. Computers and Electronics in Agriculture, 2024, 227: No.109598. |
| [15] | Guo H, Li Y, Wang H, et al. Path planning of greenhouse electric crawler tractor based on the improved A* and DWA algorithms[J]. Computers and Electronics in Agriculture, 2024, 227: No.109596. |
| [16] | Ayalew W, Menebo M, Merga C, et al. Optimal path planning using bidirectional rapidly-exploring random tree star-dynamic window approach (BRRT*-DWA) with adaptive Monte Carlo localization (AMCL) for mobile robot[J]. Engineering Research Express, 2024, 6(3): No.035212. |
| [17] | Jathunga T, Rajapaksha S. Improved path planning for multi-robot systems using a hybrid probabilistic roadmap and genetic algorithm approach[J]. Journal of Robotics and Control, 2025, 6(2): 715-733. |
| [1] | 李健,孙晓海,廖昌义,杨建平. 基于双起点蚁群算法的机器人路径规划方法[J]. 吉林大学学报(工学版), 2025, 55(1): 325-332. |
| [2] | 朱瑾,黄琦. 路网资源分配下自动化码头水平运输调度与路径规划[J]. 吉林大学学报(工学版), 2024, 54(8): 2245-2255. |
| [3] | 孙帅帅,冯春晓,张良. 基于离散采样的多模态四足机器人路径规划[J]. 吉林大学学报(工学版), 2024, 54(4): 1120-1128. |
| [4] | 孙宝凤,刘娇娇,姚天姿,任欣欣. 考虑能量消耗的纯电动物流车柔性时间窗路径规划问题[J]. 吉林大学学报(工学版), 2023, 53(4): 1047-1059. |
| [5] | 吴振宇,刘小飞,王义普. 基于DKRRT*-APF算法的无人系统轨迹规划[J]. 吉林大学学报(工学版), 2023, 53(3): 781-791. |
| [6] | 孙宝凤,姚天姿,陈雨琦. 考虑时变交通拥堵的纯电动物流车路径规划模型[J]. 吉林大学学报(工学版), 2023, 53(2): 468-479. |
| [7] | 杨帆,翟志强,汪圆圆,朱忠祥,杜岳峰,毛恩荣. 基于虚拟现实的拖拉机变速箱装配系统设计[J]. 吉林大学学报(工学版), 2023, 53(10): 3038-3044. |
| [8] | 张必达,闫强,张琳,张海瑞. 基于实时交通信息的电动汽车充换电路径规划方法[J]. 吉林大学学报(工学版), 2022, 52(10): 2333-2342. |
| [9] | 张家旭,王晨,赵健,卜纯研. 面向狭小平行泊车位的路径规划与跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(5): 1879-1886. |
| [10] | 张家旭,王欣志,赵健,施正堂. 汽车高速换道避让路径规划及离散滑模跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1081-1090. |
| [11] | 韩小健,赵伟强,陈立军,郑宏宇,刘阳,宗长富. 基于区域采样随机树的客车局部路径规划算法[J]. 吉林大学学报(工学版), 2019, 49(5): 1428-1440. |
| [12] | 钱立军, 胡伟龙, 刘庆, 吴冰. 多段式自动泊车路径规划及其关键技术[J]. 吉林大学学报(工学版), 2016, 46(3): 785-791. |
| [13] | 周炳海, 周琪. 防潜在死锁的整体式自动物料搬运系统调度方法[J]. 吉林大学学报(工学版), 2016, 46(2): 595-601. |
| [14] | 康冰, 王曦辉, 刘富. 基于改进蚁群算法的搜索机器人路径规划[J]. 吉林大学学报(工学版), 2014, 44(4): 1062-1068. |
| [15] | 刘厚德,梁斌,徐文福,穆清涛,余江华. 自旋目标运动预测及自主捕获路径规划方法[J]. 吉林大学学报(工学版), 2014, 44(3): 757-764. |
|
||