吉林大学学报(工学版) ›› 2026, Vol. 56 ›› Issue (1): 21-30.doi: 10.13229/j.cnki.jdxbgxb.20240682
基于目标锚点驱动的多模态轨迹预测方法
高镇海( ),鲍明喜,赵睿,唐明弘,高菲()
),鲍明喜,赵睿,唐明弘,高菲()
- 吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
Multimodal trajectory prediction based on target anchor-driven
Zhen-hai GAO(),Ming-xi BAO,Rui ZHAO,Ming-hong TANG,Fei GAO()
- National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
摘要:
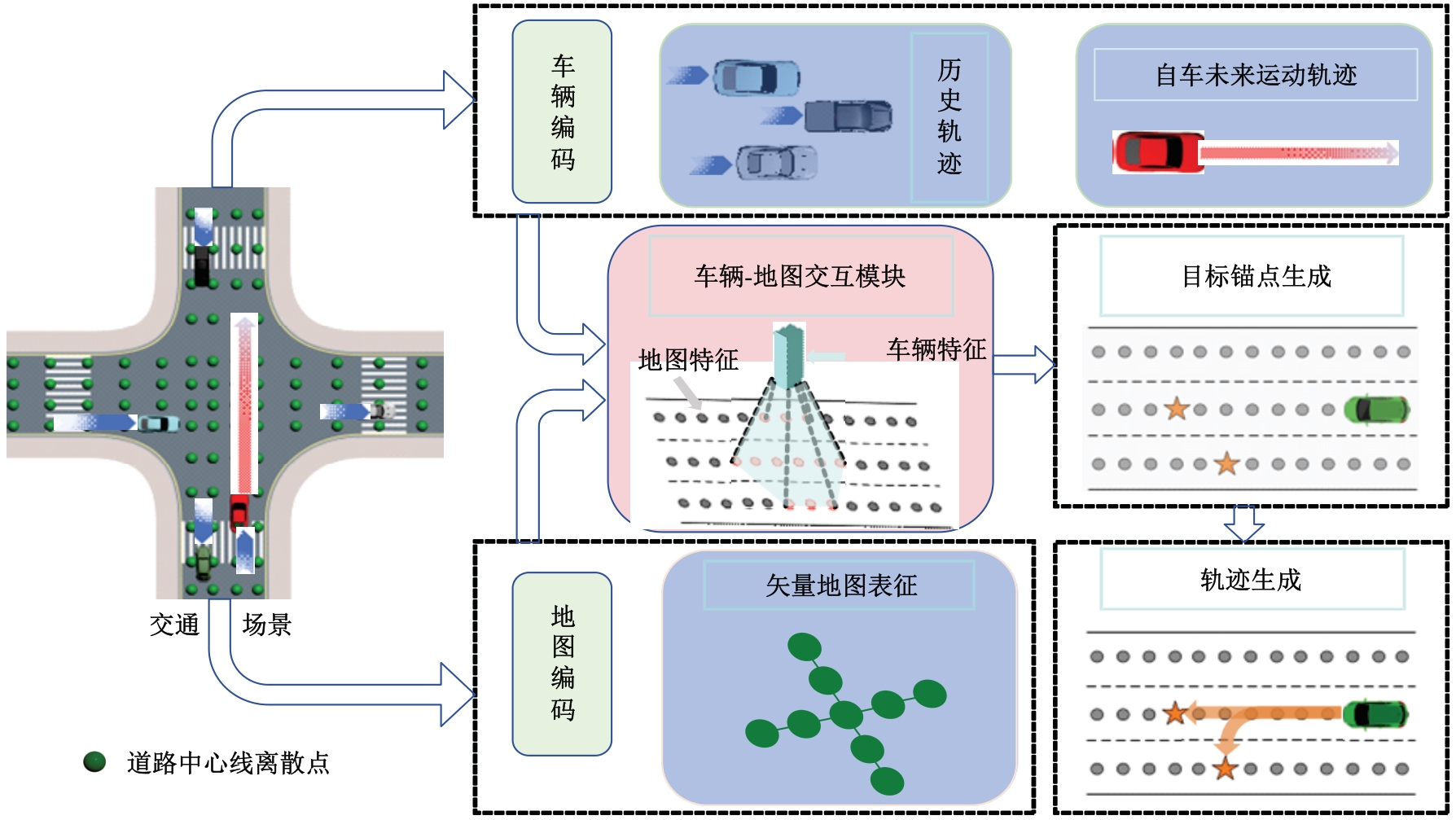
针对现有轨迹预测方法在车辆与地图交互方面的不足,导致轨迹预测结果不符合道路拓扑结构这一缺陷,提出了一种耦合自车运动趋势的目标锚点驱动的多模态轨迹预测方法(TMTP)。该模型通过图模型高效地将交通场景的先验知识引入算法中,以便能精准地描述交通场景中的异构互动关系。同时,该模型充分考虑了动态场景图的车辆历史轨迹、自车未来轨迹和静态场景图中矢量化地图的拓扑信息的交互作用,并通过注意力网络聚合不同节点之间的特征,实现了更好的局部-全局之间的特征融合。此外,TMTP将驾驶意图表征为目标锚点,简化了意图空间的复杂性。本文在大规模Argoverse运动预测基准上对本文方法进行了评估,结果表明:本文模型相比于官方基准模型在
中图分类号:
- U463





| [1] | Huang Y, Du J, Yang Z, et al. A survey on trajectory-prediction methods for autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(3): 652-674. |
| [2] | Gao Z, Bao M, Cui T, et al. Collision risk assessment for intelligent vehicles considering multi-dimensional uncertainties[J]. IEEE Access, 2024, 12: 57780-57795. |
| [3] | 高镇海, 鲍明喜, 高菲, 等. 基于LSTM概率多模态预期轨迹预测方法[J]. 汽车工程, 2023, 45(7): 1145-1152, 1162. |
| Gao Zhen-hai, Bao Ming-xi, Gao Fei, et al. The method of probabilistic multi-modal expected trajectory prediction based on LSTM[J].Automotive Engineering, 2023, 45(7): 1145-1152, 1162. | |
| [4] | Gao Z H, Bao M X, Gao F, et al. Probabilistic multi-modal expected trajectory prediction based on LSTM for autonomous driving[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering,2023,238(9): 2817-2828. |
| [5] | Jia X, Wu P, Chen L, et al. HDGT: heterogeneous driving graph transformer for multi-agent trajectory prediction via scene encoding[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(11): 13860-13875. |
| [6] | Deo N, Trivedi M M. Convolutional social pooling for vehicle trajectory prediction[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops(CVPRW), Salt Lake City, USA, 2018: 1581-1589. |
| [7] | Cai Y, Wang Z, Wang H, et al. Environment-attention network for vehicle trajectory prediction[J]. IEEE Transactions on Vehicular Technology, 2021, 70(11): 11216-11227. |
| [8] | Zhong Z, Luo Y, Liang W. STGM: vehicle trajectory prediction based on generative model for spatial-temporal features[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 18785-18793. |
| [9] | Deo N, Trivedi M M. Multi-modal trajectory prediction of surrounding vehicles with maneuver based LSTMs[C]∥IEEE Intelligent Vehicles Symposium (IV),Changshu, China, 2018:1179-1184. |
| [10] | Wang Y, Wang J, Jiang J, et al. SA-LSTM: a trajectory prediction model for complex off-road multi-agent systems considering situation awareness based on risk field[J]. IEEE Transactions on Vehicular Technology, 2023, 72(11): 14016-14027. |
| [11] | Lin L, Li W, Bi H, et al. Vehicle trajectory prediction using LSTMs with spatial-temporal attention mechanisms[J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14(2): 197-208. |
| [12] | Wu Z, Pan S, Chen F, et al. A comprehensive survey on graph neural networks[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(1): 4-24. |
| [13] | Zhou J, Cui G, Hu S, et al. Graph neural networks: a review of methods and applications[J]. AI Open, 2020, 1(1): 57-81. |
| [14] | Gilles T, Sabatini S, Tsishkou D, et al. GOHOME: graph-oriented heatmap output for future motion estimation[C]∥International Conference on Robotics and Automation(ICRA),Philadelphia, USA, 2022: 9107-9114. |
| [15] | Gilles T, Sabatini S, Tsishkou D, et al. HOME: heatmap output for future motion estimation[C]∥IEEE International Intelligent Transportation Systems Conference(ITSC), Indianapolis, USA,2021: 500-507. |
| [16] | Hong J, Sapp B, Phibin J. Rules of the road: predicting driving behavior with a convolutional model of semantic interactions[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR),Long Beach, USA, 2019: 8446-8454 . |
| [17] | Zhang L, Li P, Chen J, et al. Trajectory prediction with graph-based dual-scale context fusion[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), Kyoto, Japan,2022: 11374-11381 . |
| [18] | Gu J, Sun C, Zhao H. DenseTNT: end-to-end trajectory prediction from dense goal sets[C]∥IEEE/CVF International Conference on Computer Vision (ICCV), Online,2021:15283-15292. |
| [19] | Liang M, Yang B, Hu R, et al. LaneGCN:learning lane graph representations for motion forecasting[C]∥ The 16th European Conference on Computer Vision, Glasgow, UK, 2020: 541-556. |
| [20] | Song H, Ding W, Chen Y, et al. PiP: planning-informed trajectory prediction for autonomous driving[C]∥The 16th European Conference on Computer Vision, Glasgow, UK, 2020: 598-614. |
| [21] | Guo H, Meng Q, Cao D, et al. Vehicle trajectory prediction method coupled with ego vehicle motion trend under dual attention mechanism[J]. IEEE Transactions on Instrumentation and Measurement,2022, 71: 1-16. |
| [22] | Zhang L, Su P H, Hoang J, et al. Map-adaptive goal-based trajectory prediction[J/OL].[2024-05-26].. |
| [23] | Zhao H, Gao J, Lan T, et al. TNT: Target-driveN trajectory prediction[C]∥IEEE Conference on Robot Learning,London, UK,2021: 895-904. |
| [24] | Chang M F, Ramanan D, Hays J, et al. Argoverse: 3D tracking and forecasting with rich maps[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR), Long Beach, USA,2019:8740-8749. |
| [25] | Gilles T, Sabatini S, Tsishkou D, et al. THOMAS: trajectory heatmap output with learned multi-agent sampling[J/OL].[2024-05-26].. |
| [1] | 张向文,王子豪. 电动汽车制动模式切换过程电液协调控制策略[J]. 吉林大学学报(工学版), 2026, 56(1): 31-43. |
| [2] | 兰巍,周政,王冠宇,王伟,张苗苗. 基于机器学习的汽车设计智能拟合方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2858-2863. |
| [3] | 孙天骏,杨惠喆,蔡荣贵,冯嘉仪,冉锐,刘斌. 面向纯电动汽车自适应巡航系统的人性化起停控制策略[J]. 吉林大学学报(工学版), 2025, 55(9): 2847-2857. |
| [4] | 李寿涛,贾湘怡,朱军,郭洪艳,于丁力. 基于Level-K的智能驾驶汽车无信控交叉路口决策方法[J]. 吉林大学学报(工学版), 2025, 55(9): 3069-3078. |
| [5] | 朱冰,孟鹏翔,刘斌,韩嘉懿,赵健,陈志成,宋东鉴,陶晓文. 基于交通环境信息的虚拟车道线拟合方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2935-2945. |
| [6] | 赵俊武,曲婷,胡云峰. 基于自适应采样的智能车辆轨迹规划方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2802-2816. |
| [7] | 于贵申,陈鑫,唐悦,赵春晖,牛艾佳,柴辉,那景新. 激光表面处理对铝-铝粘接接头剪切强度的影响[J]. 吉林大学学报(工学版), 2025, 55(8): 2555-2569. |
| [8] | 高金武,孙少龙,王舜尧,高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2475-2486. |
| [9] | 赵睿,袁其瑞,连家俊,高菲,胡宏宇,高镇海. 考虑双重不确定性的智能车辆碰撞风险评估[J]. 吉林大学学报(工学版), 2025, 55(8): 2597-2610. |
| [10] | 车翔玖,李良. 融合全局与局部细粒度特征的图相似度度量算法[J]. 吉林大学学报(工学版), 2025, 55(7): 2365-2371. |
| [11] | 柴树山,周志强,李海涛,徐炅旸. 基于图时空模式学习网络的路网实时交通事件自动检测方法[J]. 吉林大学学报(工学版), 2025, 55(7): 2145-2161. |
| [12] | 贾美霞,胡建军,肖凤. 基于多软件联合的车用电机变工况多物理场仿真方法[J]. 吉林大学学报(工学版), 2025, 55(6): 1862-1872. |
| [13] | 宋学伟,于泽平,肖阳,王德平,袁泉,李欣卓,郑迦文. 锂离子电池老化后性能变化研究进展[J]. 吉林大学学报(工学版), 2025, 55(6): 1817-1833. |
| [14] | 肖纯,易子淳,周炳寅,张少睿. 基于改进鸽群优化算法的燃料电池汽车模糊能量管理策略[J]. 吉林大学学报(工学版), 2025, 55(6): 1873-1882. |
| [15] | 王健,贾晨威. 面向智能网联车辆的轨迹预测模型[J]. 吉林大学学报(工学版), 2025, 55(6): 1963-1972. |
|
||