吉林大学学报(工学版) ›› 2018, Vol. 48 ›› Issue (6): 1811-1819.doi: 10.13229/j.cnki.jdxbgxb20170628
具有H∞性能的轮式移动机器人非线性控制器设计
顾万里1,2( ),王萍1,2(),胡云峰1,2,蔡硕2,陈虹1,2
),王萍1,2(),胡云峰1,2,蔡硕2,陈虹1,2
- 1. 吉林大学 汽车仿真与控制国家重点实验室,长春130022
2. 吉林大学 通信工程学院,长春130022
Nonlinear controller design of wheeled mobile robot with H∞ performance
GU Wan-li1,2(),WANG Ping1,2(),HU Yun-feng1,2,CAI Shuo2,CHEN Hong1,2
- 1. State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130022,China
2. College of Communication Engineering, Jilin University, Changchun 130022,China
摘要:
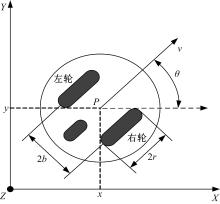
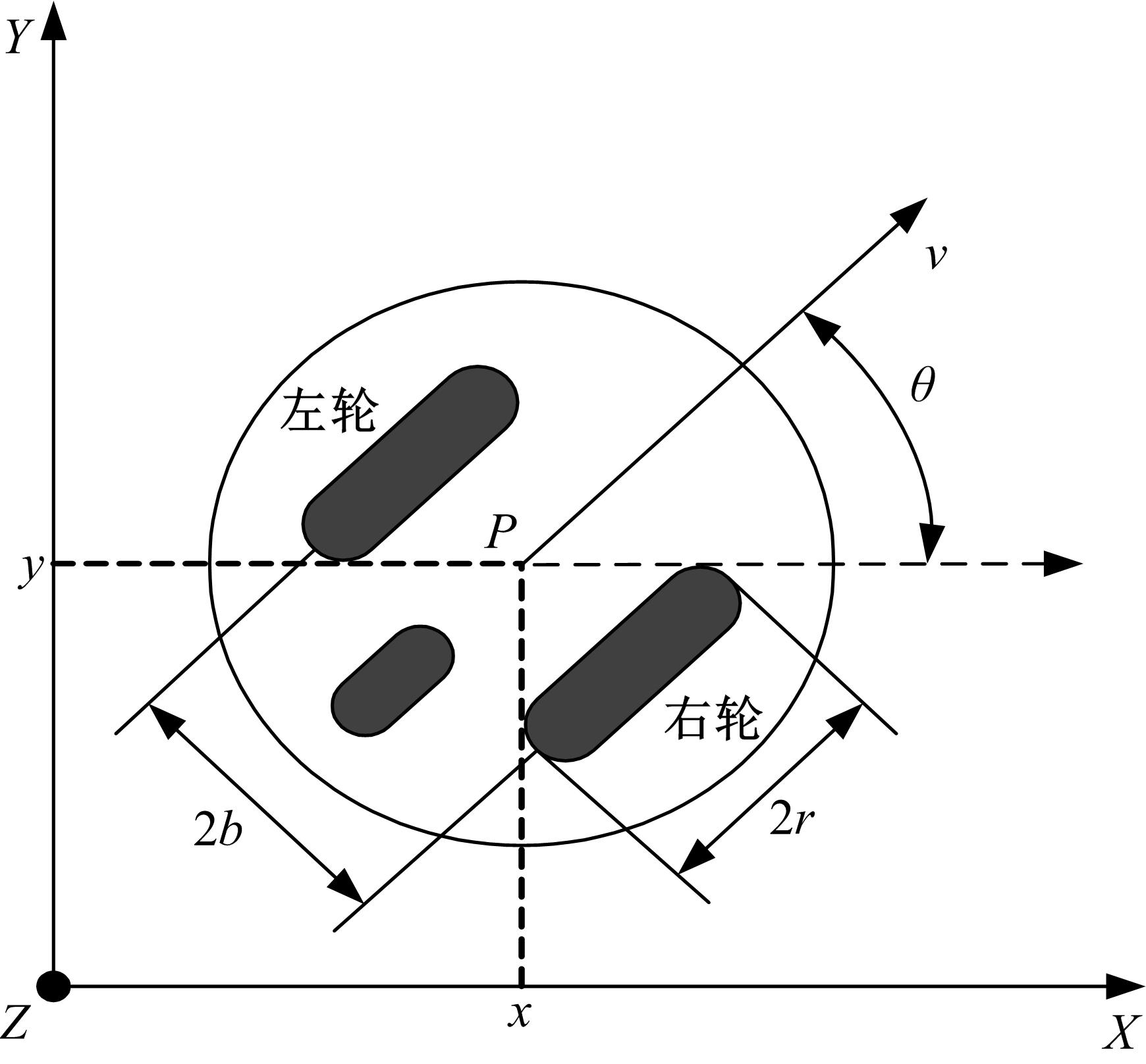
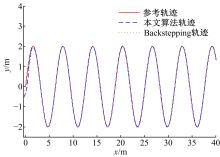
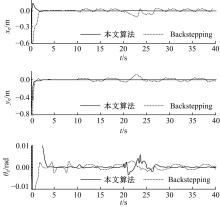
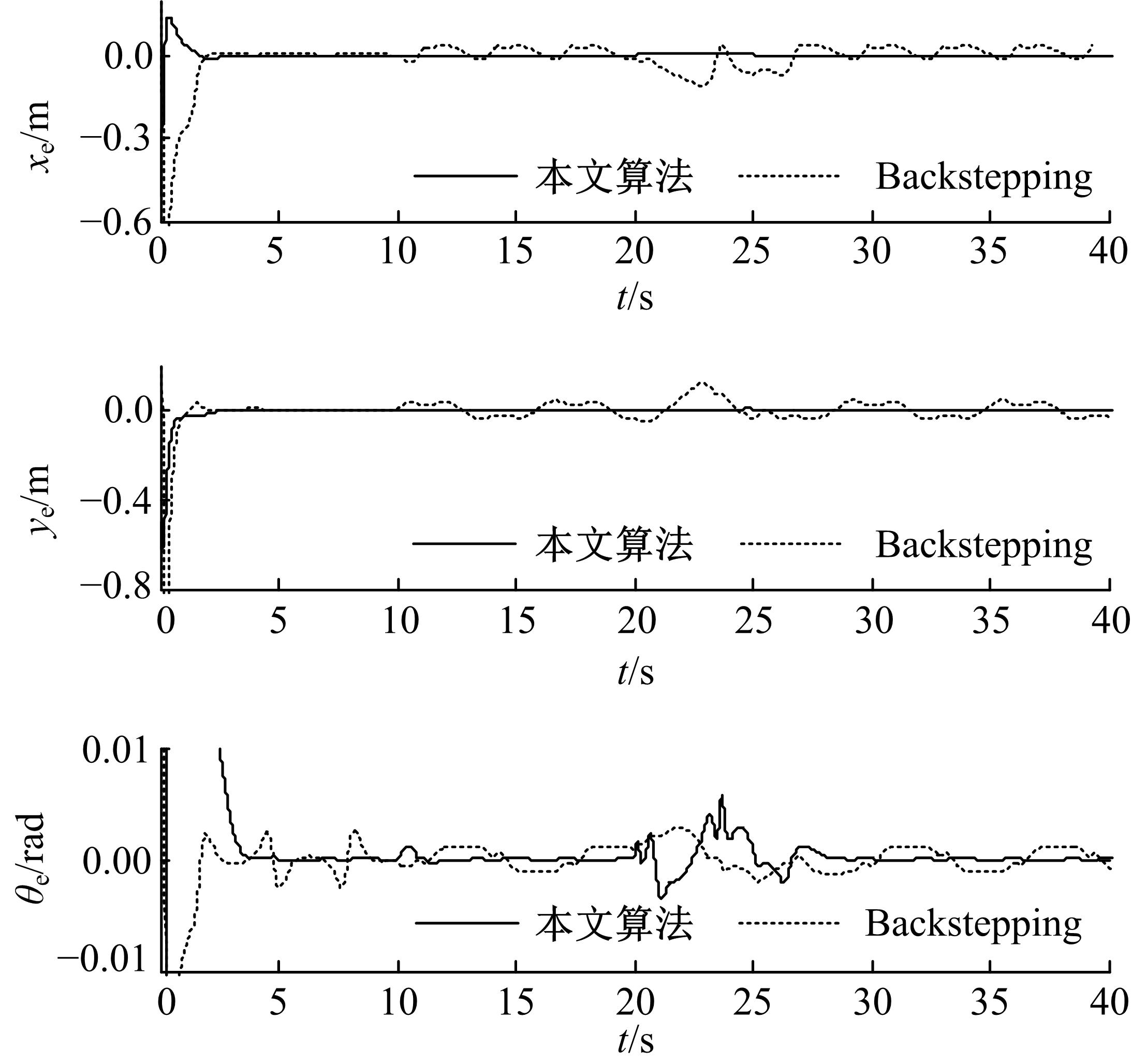
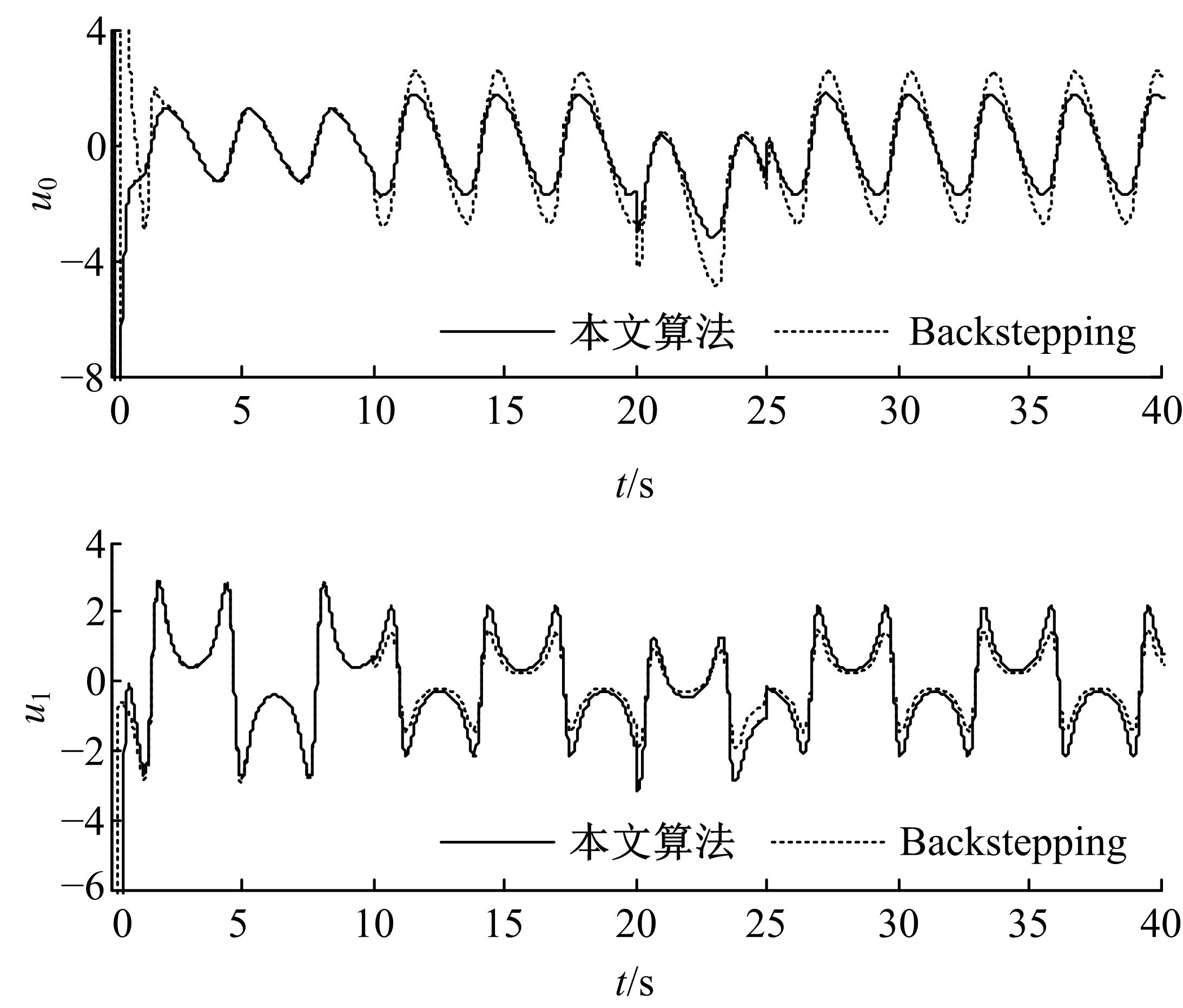
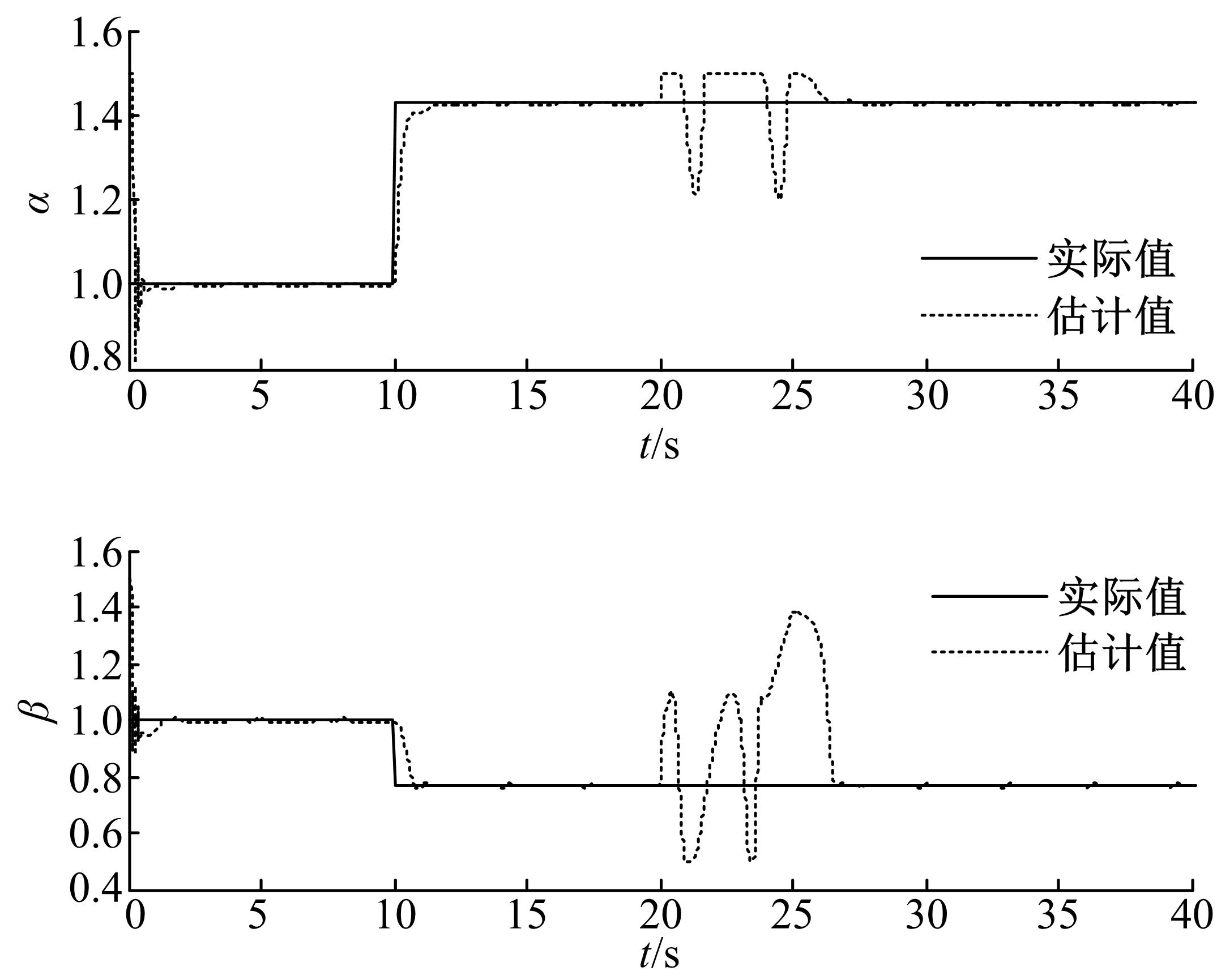
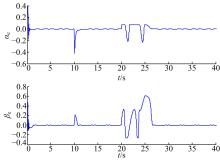
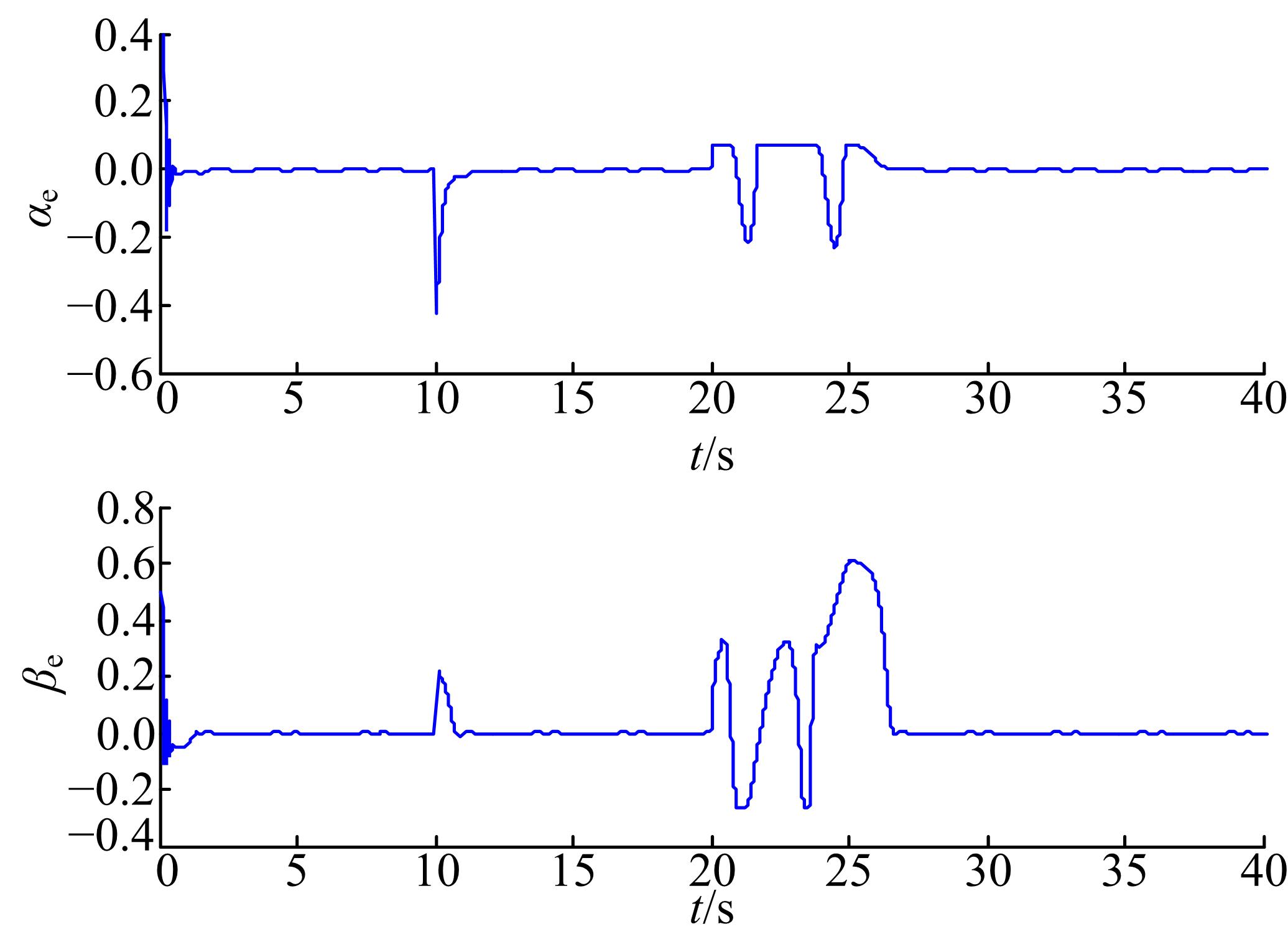
针对移动机器人动力学模型中的参数不确定性和扰动不确定性问题,提出了具有H∞跟踪性能的自适应反步控制方法。首先,以线速度和角速度为虚拟的控制输入,设计了具有渐进稳定性的运动学轨迹跟踪控制器。其次,针对动力学系统中存在的不确定参数,采用自适应方法对其进行在线估计,该方法通过引入不连续映射保证了参数估计值的有界性。然后,采用反步法设计了动力学控制器,同时,在Lyapunov框架下证明了该控制器对扰动具有H∞性能。最后通过仿真试验证明,即使在参数未知的情况下,该控制器也能够控制移动机器人跟踪上参考轨迹,且当系统存在外部扰动时,系统输出偏差能够收敛到有界范围内。由此验证了本文方法能够有效抑制系统参数变化及扰动对控制性能的影响。
中图分类号:
- TP273


| [1] |
Sutoh M, Otsuki M, Wakabayashi S , et al. The right path:comprehensive path planning for lunar exploration rovers[J]. IEEE Robotics & Automation Magazine, 2015,22(1):22-33.
doi: 10.1109/MRA.2014.2381359 |
| [2] | Cen Y, Song C, Xie N, et al. Path planning method for mobile robot based on ant colony optimization algorithm [C]//3rd IEEE Conference on Industrial Electronics and Applications,Iciea, 2008: 298-301. |
| [3] | 叶锦华, 李迪, 叶峰 . 轮式移动机器人的双强化学习自适应模糊控制[J]. 吉林大学学报:工学版, 2014,44(3):742-749. |
| Ye Jin-hua, Li Di, Ye Feng . Dual reinforcement learning adaptive fuzzy control of wheeled mobile robot[J]. Journal of Jilin University (Engineering and Technology Edition), 2014,44(3):742-749. | |
| [4] | 李艳东, 王宗义, 朱玲 , 等. 基于递归模糊神经网络的移动机器人滑模控制[J]. 吉林大学学报:工学版, 2011,41(6):1731-1737. |
| Li Yan-dong, Wang Zong-yi, Zhu Ling , et al. Sliding control of mobile robots based on recurrent fuzzy-neural network[J]. Journal of Jilin University (Engineering and TechnologyEdition), 2011,41(6):1731-1737. | |
| [5] |
Boubens M, Boukabou A, Chadli M . Robust adaptive neural network-based trajectory tracking control approach for nonholonomic electrically driven mobile robots[J]. Robotics and Autonomous Systems, 2017,92:30-40.
doi: 10.1016/j.robot.2017.03.001 |
| [6] |
Du Hai-bo, Wen Guang-hui, Cheng Ying-ying , et al. Distributed finite-time cooperative control of multiple high-order nonholonomic mobile robots[J]. IEEE Transactions on Neural Networks and Learning Systems, 2017,28(12):2998-3006.
doi: 10.1109/TNNLS.2016.2610140 pmid: 28113525 |
| [7] |
Jiang Z P, Nijmeijer H . Tracking control of mobile robots: a case study in backstepping[J]. Automatica, 1997,33(7):1393-1399.
doi: 10.1016/S0005-1098(97)00055-1 |
| [8] |
Zhang Q, Shippen J, Jones B . Robust backstepping and neural network control of a low-quality nonholonomic mobile robot[J]. International Journal of Machine Tools and Manufacture, 1999,39(7):1117-1134.
doi: 10.1016/S0890-6955(98)00080-7 |
| [9] |
d'Andréa-Novel B, Campion G, Bastin G . Control of nonholonomic wheeled mobile robots by state feedback linearization[J]. The International Journal of Robotics Research, 1995,14(6):543-559.
doi: 10.1109/ROBOT.1992.220061 |
| [10] |
Yang J M, Kim J H . Sliding mode control for trajectory tracking of nonholonomic wheeled mobile robots[J]. IEEE Transactions on Robotics and Automation, 1999,15(3):578-587.
doi: 10.1109/70.768190 |
| [11] |
孙棣华, 崔明月, 李永福 . 具有参数不确定性的轮式移动机器人自适应Backstepping控制[J]. 控制理论与应用, 2012,29(9):1198-1204.
doi: 10.7641/j.issn.1000-8152.2012.9.ccta111045 |
|
Sun Di-hua, Cui Ming-yue, Li Yong-fu . Adaptive backstepping control of wheeled mobile robots withparameter uncertainties[J]. Control Theory & Applications, 2012,29(9):1198-1204.
doi: 10.7641/j.issn.1000-8152.2012.9.ccta111045 |
|
| [12] |
Das T, Kar I N . Design and implementation of an adaptive fuzzy logic-based controller for wheeled mobile robots[J]. IEEE Transactions on Control Systems Technology, 2006,14(3):501-510.
doi: 10.1109/TCST.2006.872536 |
| [13] | 姜玉乾 . 基于解耦和H∞鲁棒的非完整移动机器人轨迹跟踪控制研究 [D]. 南京:南京航空航天大学机电学院, 2005. |
| Jiang Yu-qian . Trajectory tracking control of nonholonomicmobile robot based on decoupling and H∞ robust strategy[D]. Nanjing: College of Mechanical-Electrical Engineering, Nanjing University of Aeronautics and Astronautics, 2005. | |
| [14] | 王伟 . 移动机器人H∞控制及数据采集[D]. 东营:中国石油大学(华东)信息与控制工程学院 , 2011. |
| Wang Wei . H∞ robust control for mobile robot and data collection [D]. Dongying: College of Information and Control Engineering,China University of Petroleum(East China) , 2011. | |
| [15] |
Ye J . Tracking control of a non-holonomic wheeled mobile robot using improved compound cosine function neural networks[J]. International Journal of Control, 2015,88(2):364-373.
doi: 10.1080/00207179.2014.953590 |
| [16] |
Huang J, Wen C, Wang W , et al. Adaptive stabilization and tracking control of a nonholonomic mobile robot with input saturation and disturbance[J]. Systems & Control Letters, 2013,62(3):234-241.
doi: 10.1016/j.sysconle.2012.11.020 |
| [17] |
Chang Y C . An adaptive H/sup/spl infin//tracking control for a class of nonlinear multiple-input multiple-output (MIMO) systems[J]. IEEE Transactions on Automatic Control, 2001,46(9):1432-1437.
doi: 10.1109/9.948472 |
| [18] |
Zhou S, Lam J, Zheng W X . Control design for fuzzy systems based on relaxed nonquadratic stability and hinfty performance conditions[J]. IEEE Transactions on Fuzzy Systems, 2007,15(2):188-199.
doi: 10.1109/TFUZZ.2006.879996 |
| [19] | Sontag E D . Input to State Stability: Basic Concepts and Results[M]. Berlin Heidelberg:Springer, 2008: 163-220. |
| [1] | 温海营,任翔,徐卫良,丛明,秦文龙,胡书海. 咀嚼机器人颞下颌关节仿生设计及试验测试[J]. 吉林大学学报(工学版), 2019, 49(3): 943-952. |
| [2] | 于树友,谭雷,王伍洋,陈虹. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报(工学版), 2019, 49(3): 934-942. |
| [3] | 李战东,陶建国,罗阳,孙浩,丁亮,邓宗全. 核电水池推力附着机器人系统设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1820-1826. |
| [4] | 赵爽,沈继红,张刘,赵晗,陈柯帆. 微细电火花加工表面粗糙度快速高斯评定[J]. 吉林大学学报(工学版), 2018, 48(6): 1838-1843. |
| [5] | 王德军, 魏薇郦, 鲍亚新. 考虑侧风干扰的电子稳定控制系统执行器故障诊断[J]. 吉林大学学报(工学版), 2018, 48(5): 1548-1555. |
| [6] | 闫冬梅, 钟辉, 任丽莉, 王若琳, 李红梅. 具有区间时变时滞的线性系统稳定性分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1556-1562. |
| [7] | 董惠娟, 于震, 樊继壮. 基于激光测振仪的非轴对称超声驻波声场的识别[J]. 吉林大学学报(工学版), 2018, 48(4): 1191-1198. |
| [8] | 张茹斌, 占礼葵, 彭伟, 孙少明, 刘骏富, 任雷. 心肺功能评估训练系统的恒功率控制[J]. 吉林大学学报(工学版), 2018, 48(4): 1184-1190. |
| [9] | 田彦涛, 张宇, 王晓玉, 陈华. 基于平方根无迹卡尔曼滤波算法的电动汽车质心侧偏角估计[J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
| [10] | 张士涛, 张葆, 李贤涛, 王正玺, 田大鹏. 基于零相差轨迹控制方法提升快速反射镜性能[J]. 吉林大学学报(工学版), 2018, 48(3): 853-858. |
| [11] | 王林, 王洪光, 宋屹峰, 潘新安, 张宏志. 输电线路悬垂绝缘子清扫机器人行为规划[J]. 吉林大学学报(工学版), 2018, 48(2): 518-525. |
| [12] | 胡云峰, 王长勇, 于树友, 孙鹏远, 陈虹. 缸内直喷汽油机共轨系统结构参数优化[J]. 吉林大学学报(工学版), 2018, 48(1): 236-244. |
| [13] | 朱枫, 张葆, 李贤涛, 王正玺, 张士涛. 基于强跟踪卡尔曼滤波的陀螺信号处理[J]. 吉林大学学报(工学版), 2017, 47(6): 1868-1875. |
| [14] | 晋超琼, 张葆, 李贤涛, 申帅, 朱枫. 基于扰动观测器的光电稳定平台摩擦补偿策略[J]. 吉林大学学报(工学版), 2017, 47(6): 1876-1885. |
| [15] | 冯建鑫. 具有测量时滞的不确定系统的递推鲁棒滤波[J]. 吉林大学学报(工学版), 2017, 47(5): 1561-1567. |
|