吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (4): 1100-1106.doi: 10.13229/j.cnki.jdxbgxb20180441
• • 上一篇
车路协同环境下路段掉头区域车辆协同控制
吴文静1( ),陈润超1,贾洪飞1(),罗清玉1,孙迪2
),陈润超1,贾洪飞1(),罗清玉1,孙迪2
- 1. 吉林大学 交通学院,长春 130022
2. 北京联合大学 城市轨道交通与物流学院,北京 100101
Collaborative control method of vehicles in U⁃turn zone under environment of cooperative vehicle infrastructure system
Wen⁃jing WU1(),Run⁃chao CHEN1,Hong⁃fei JIA1(),Qing⁃yu LUO1,Di SUN2
- 1. College of Transportation, Jilin University, Changchun 130022, China
2. School of Urban Rail Transit and Logisitics, Beijing Union University, Beijing 100101, China
摘要:
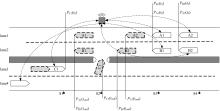
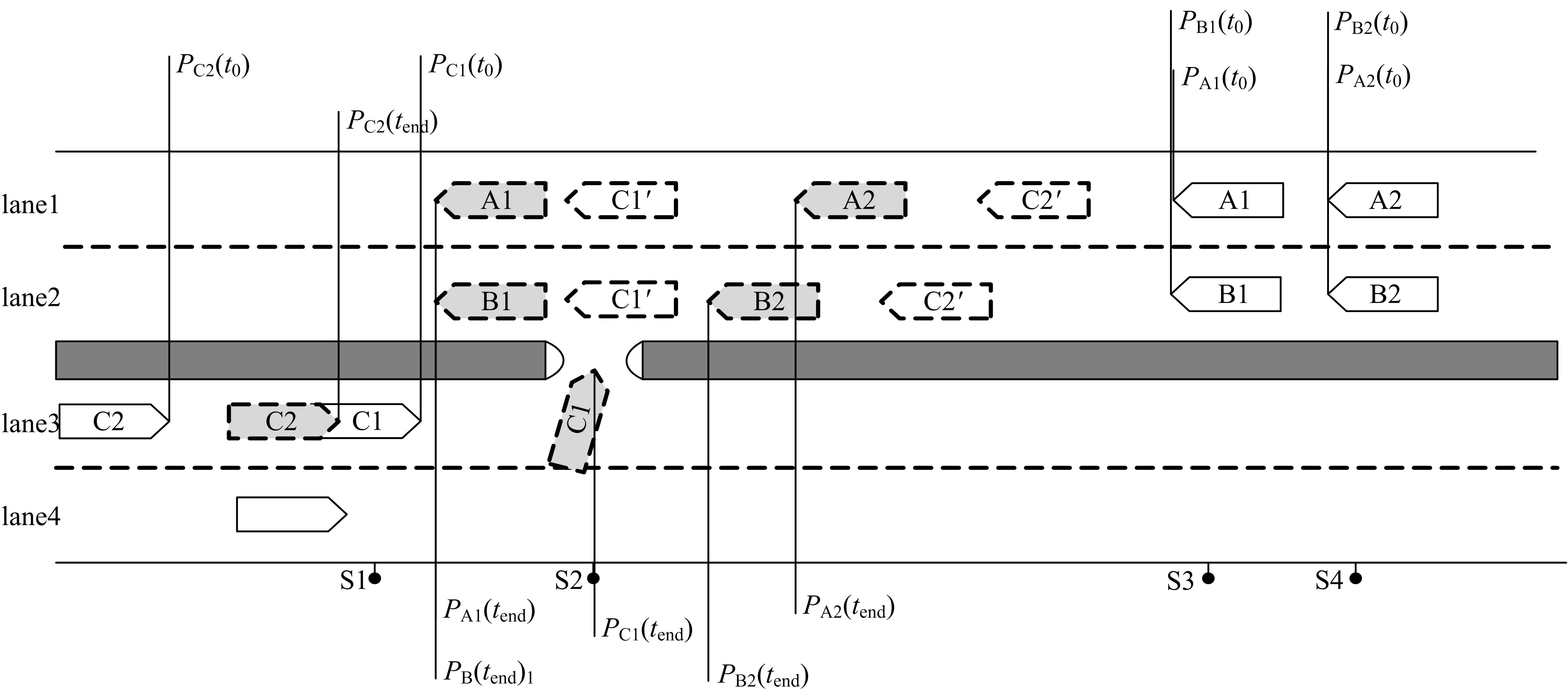
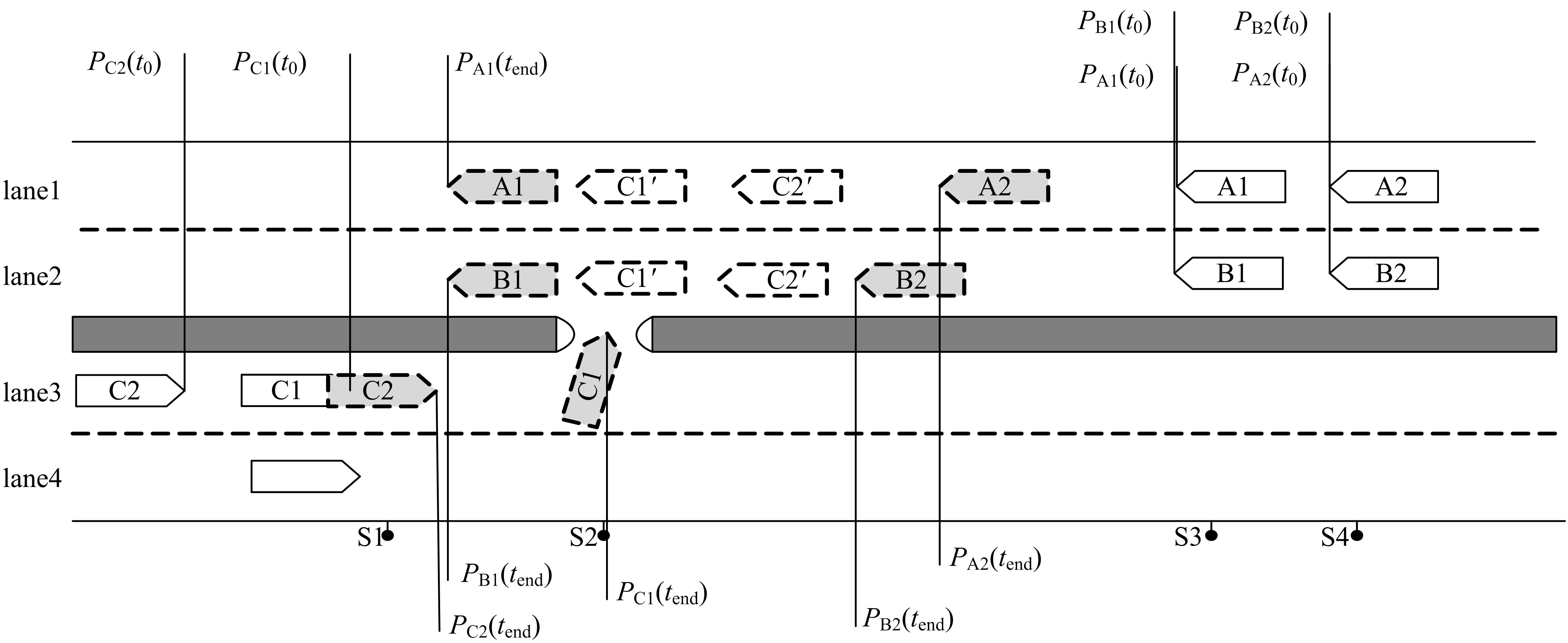
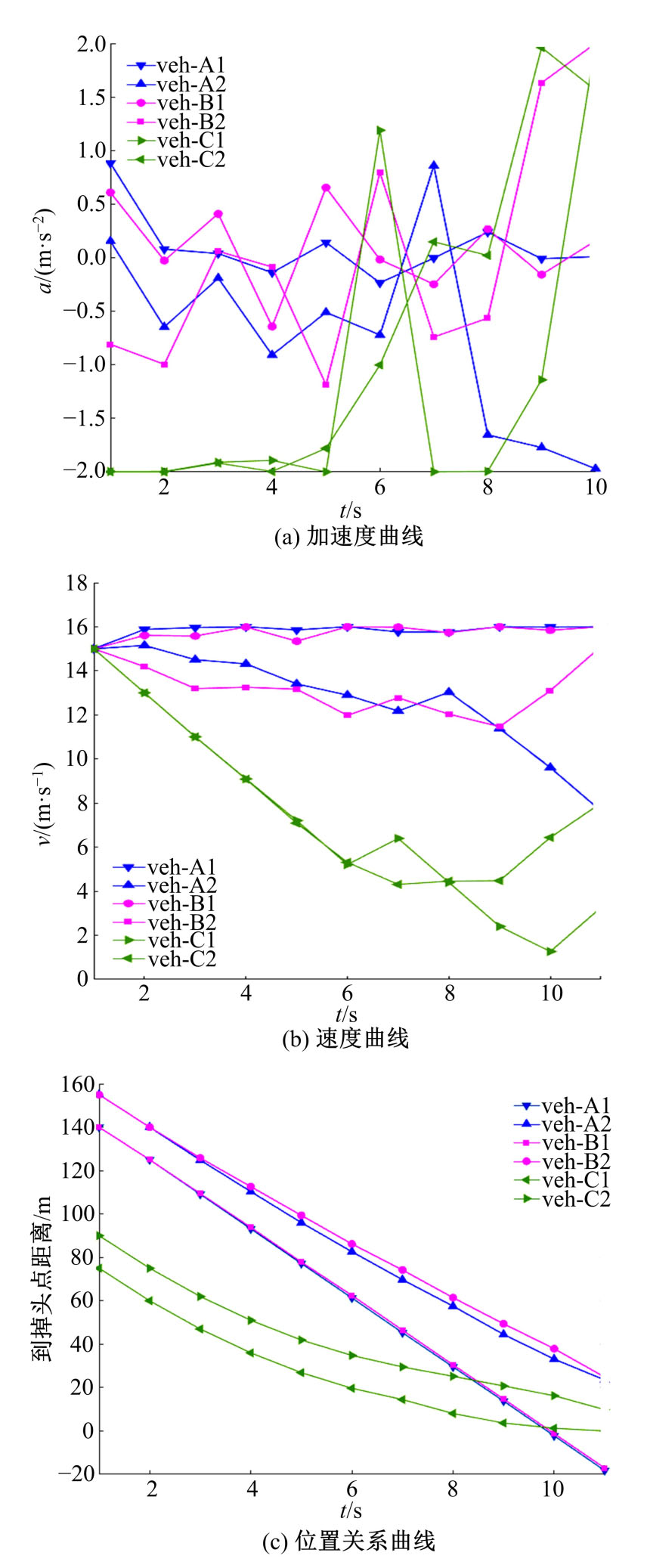
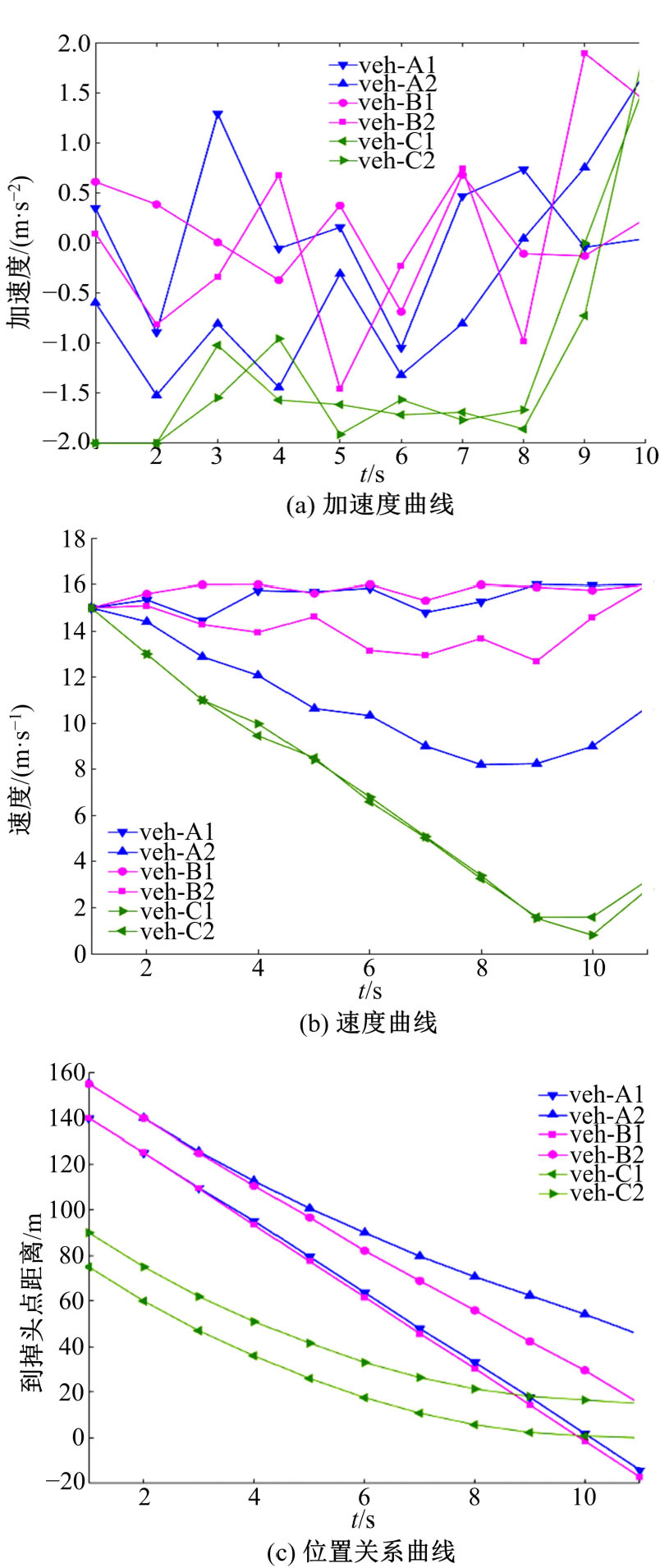
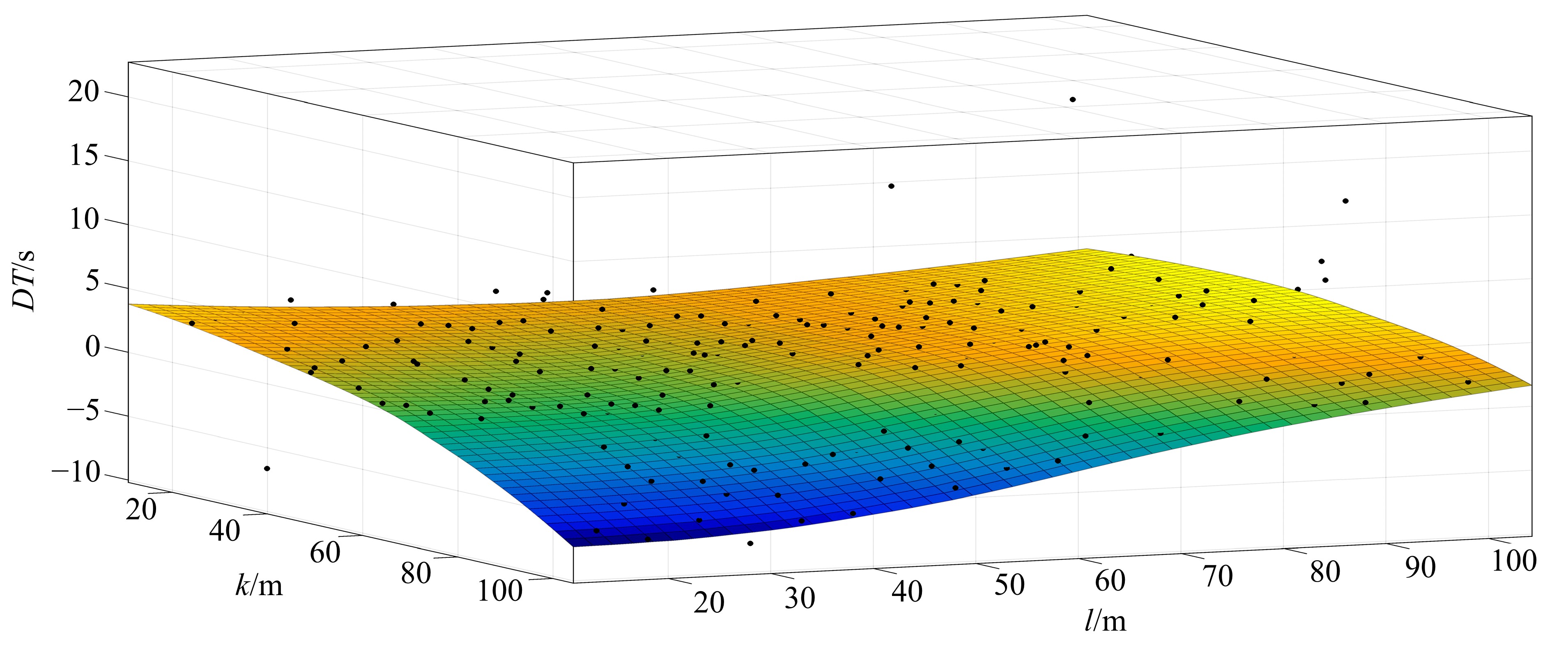
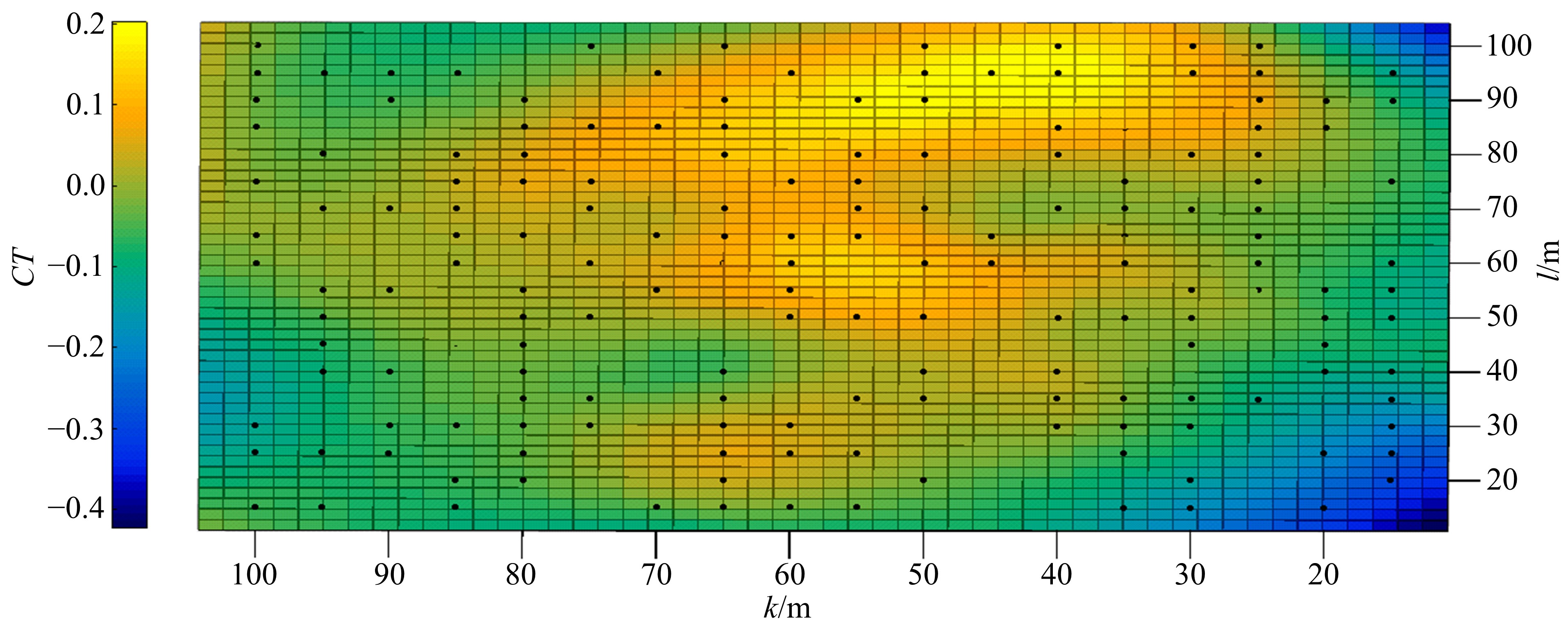
在车辆驾驶安全的前提下,以车速最大为目标研究了车路协同系统(CVIS)环境下掉头区域车辆的协同控制优化方法。分别设置单车连续掉头及车队掉头两种场景进行控制策略的仿真试验。结果表明,本文方法可实现掉头区域车辆的协同控制。最后,以总延误时间、驾驶舒适性为指标评估控制效率,并得到两种控制策略相适用的车头间距的阈值。
中图分类号:
- U491



| 1 | Wang Yun⁃peng , Wen⁃juan E , Tang Wen⁃zhong , et al . Automated on⁃ramp merging control algorithm based on internet⁃connected vehicles[J]. IET Intelligent Transport Systems, 2013, 7(4): 371⁃379. |
| 2 | Xie Yuan C , Zhang Hui X , Gartner N H , et al . Collaborative merging strategy for freeway ramp operations in a connected and autonomous vehicles environment[J]. Journal of Intelligent Transportation Systems: Technology, Planning, and Operations, 2017, 21(2): 136⁃147. |
| 3 | Zhang Hao . Research and development of CVIS testing system at road intersection based on ZigBee[J]. Applied Mechanics and Materials, 2014, 462⁃463: 505⁃509. |
| 4 | Zhang Guo⁃hui , Wang Yin⁃hai . Optimizing minimum and maximum green time settings for traffic actuated control at isolated intersections[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(1): 164⁃173. |
| 5 | Li Zhi⁃xia . Next⁃generation intersection control powered by autonomous and connected vehicle technologies[C]∥ Advance in Intelligent Systems and Computing, Berlin: Springer, 2017: 25⁃26. |
| 6 | Zheng Yi , Jin Li⁃sheng , Jiang Yu⁃ying , et al . Research on cooperative vehicle intersection control scheme without using traffic lights under the connected vehicles environment[J]. Advances in Mechanical Engineering, 2017, 9(8): 1⁃13. |
| 7 | Rahmati Y , Alireza T . Towards a collaborative connected, automated driving environment: a game theory based decision framework for unprotected left turn maneuvers[C]∥2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, USA, 2017: 1316⁃1321. |
| 8 | Dong Fang , Zhao Ya⁃nan , Gao Li . Application of Gray Correlation and Improved AHP to Evaluation on Intelligent U⁃Turn Behavior of Unmanned Vehicles[C]∥IEEE International Symposium on Computational Intelligence and Design, Ghaziabad, India,2016:25⁃29. |
| [1] | 曲昭伟,潘昭天,陈永恒,陶鹏飞,孙迪. 基于最优速度模型的改进安全距离跟驰模型[J]. 吉林大学学报(工学版), 2019, 49(4): 1092-1099. |
| [2] | 白乔文,曲昭伟,陈永恒,熊帅,陶楚青. 非严格优先权下无左转专用相位直行车辆轨迹模型建立[J]. 吉林大学学报(工学版), 2019, 49(3): 673-679. |
| [3] | 李志慧,钟涛,赵永华,胡永利,李海涛,赵景伟. 面向车辆自主驾驶的行人跟踪算法[J]. 吉林大学学报(工学版), 2019, 49(3): 680-687. |
| [4] | 曹宁博,赵利英,曲昭伟,陈永恒,白乔文,邓晓磊. 考虑双向行人跟随行为的社会力模型[J]. 吉林大学学报(工学版), 2019, 49(3): 688-694. |
| [5] | 罗小芹,王殿海,金盛. 面向混合交通的感应式交通信号控制方法[J]. 吉林大学学报(工学版), 2019, 49(3): 695-704. |
| [6] | 陈磊,王江锋,谷远利,闫学东. 基于思维进化优化的多源交通数据融合算法[J]. 吉林大学学报(工学版), 2019, 49(3): 705-713. |
| [7] | 尹超英,邵春福,王晓全. 考虑停车可用性的建成环境对小汽车通勤出行的影响[J]. 吉林大学学报(工学版), 2019, 49(3): 714-719. |
| [8] | 凃强,程琳,林芬,孙超. 考虑出行者风险态度的最优路径搜索[J]. 吉林大学学报(工学版), 2019, 49(3): 720-726. |
| [9] | 陈永恒,刘芳宏,曹宁博. 信控交叉口行人与提前右转机动车冲突影响因素[J]. 吉林大学学报(工学版), 2018, 48(6): 1669-1676. |
| [10] | 常山,宋瑞,何世伟,黎浩东,殷玮川. 共享单车故障车辆回收模型[J]. 吉林大学学报(工学版), 2018, 48(6): 1677-1684. |
| [11] | 曲大义,杨晶茹,邴其春,王五林,周警春. 基于干线车流排队特性的相位差优化模型[J]. 吉林大学学报(工学版), 2018, 48(6): 1685-1693. |
| [12] | 宗芳, 齐厚成, 唐明, 吕建宇, 于萍. 基于GPS数据的日出行模式-出行目的识别[J]. 吉林大学学报(工学版), 2018, 48(5): 1374-1379. |
| [13] | 刘翔宇, 杨庆芳, 隗海林. 基于随机游走算法的交通诱导小区划分方法[J]. 吉林大学学报(工学版), 2018, 48(5): 1380-1386. |
| [14] | 钟伟, 隽志才, 孙宝凤. 不完全网络的城乡公交一体化枢纽层级选址模型[J]. 吉林大学学报(工学版), 2018, 48(5): 1387-1397. |
| [15] | 刘兆惠, 王超, 吕文红, 管欣. 基于非线性动力学分析的车辆运行状态参数数据特征辨识[J]. 吉林大学学报(工学版), 2018, 48(5): 1405-1410. |
|
||