吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (3): 680-687.doi: 10.13229/j.cnki.jdxbgxb20180201
面向车辆自主驾驶的行人跟踪算法
李志慧1( ),钟涛1,赵永华2(),胡永利1,李海涛1,赵景伟3
),钟涛1,赵永华2(),胡永利1,李海涛1,赵景伟3
- 1. 吉林大学 交通学院, 长春 130022
2. 吉林大学 公共计算机公共教学与研究中心, 长春 130022
3. 长春市公安局交警支队, 长春 130000
Pedestrian tracking algorithm for autonomous driving
Zhi⁃hui LI1(),Tao ZHONG1,Yong⁃hua ZHAO2(),Yong⁃li HU1,Hai⁃tao LI1,Jing⁃wei ZHAO3
- 1. College of Transportation, Jilin University, Changchun 130022,China
2. Public Computer Education and Research Center, Jilin University, Changchun 130022,China
3. Traffic Police Division of Public Security Bureau, Changchun 130000,China
摘要:
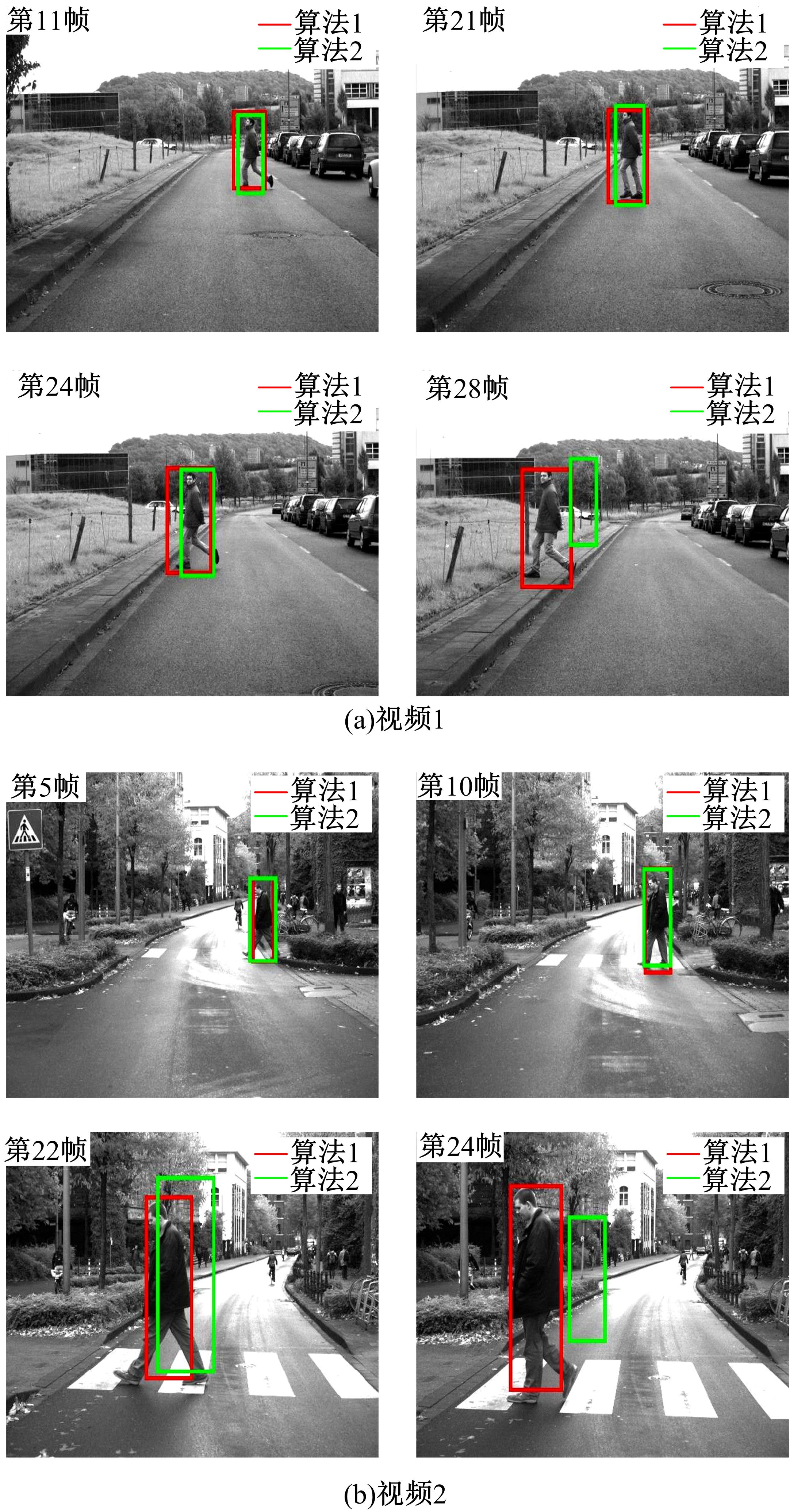
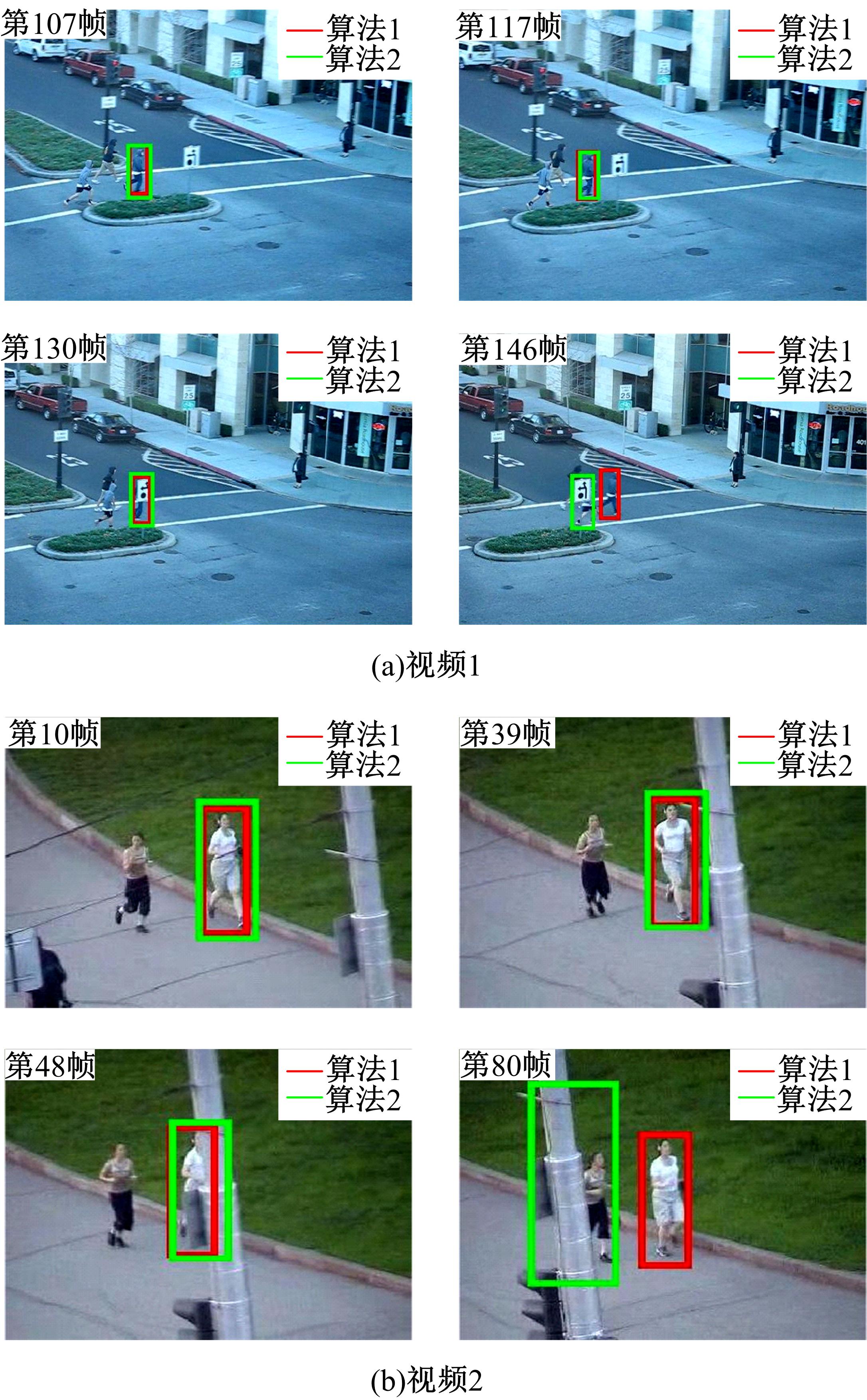
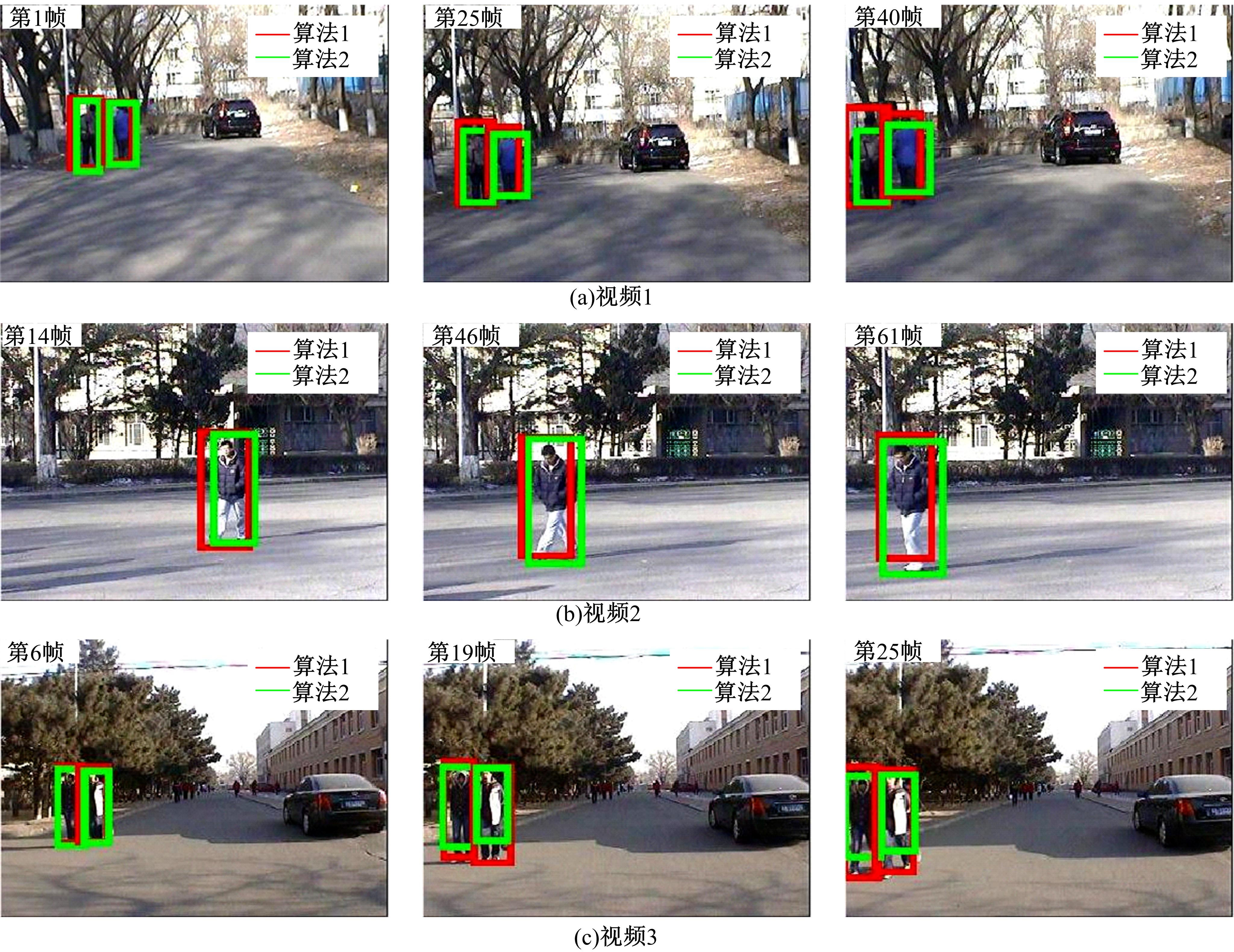
基于背景感知相关滤波框架和车辆前方行人运动的特点,建立了运动行人尺度快速估计和选择性更新的行人跟踪算法。首先,在线训练学习待跟踪行人的背景感知相关滤波器。其次,针对行人的尺度变化训练一个一维的尺度相关滤波器对尺度进行精细搜索,使算法更适应车载的快速尺度变化。再次,利用峰值旁瓣比评价行人状态,建立两相关滤波器的选择性更新机制。最后,基于吉林大学车载试验数据库JLU?PDS、德国奔驰Daimler、美国OTB共享国际测试库,与卡尔曼车载行人跟踪算法进行对比测试,试验结果表明本文算法具有较好的尺度适应和抗遮挡性能,更能满足车辆自主驾驶的需求。
中图分类号:
- U495





| 1 | 李文辉,周强,王莹,等 . 基于均值偏移粒子滤波的自适应跟踪[J]. 吉林大学学报:工学版,2012,42(2):407⁃411. |
| Li Wen⁃hui , Zhou Qiang , Wang Ying ,et al . Adaptive tracking algorithm based on particle filter⁃mean shift[J]. Journal of Jilin University(Engineering and Technology Edition), 2012,42(2):407⁃411. | |
| 2 | 赵宏伟,冯嘉,臧雪柏,等 . 一种实用的运动目标检测和跟踪算法[J]. 吉林大学学报:工学版,2009,39(增刊2):386⁃390. |
| Zhao Hong⁃wei , Feng Jia , Zang Xue⁃bai ,et al . Practical moving target detection and tracking algorithm[J]. Journal of Jilin University(Engineering and Technology Edition), 2009,39(Sup.2):386⁃390. | |
| 3 | 李鹏,宋申民,陈兴林,等 . 基于迭代sigma点粒子滤波的再入目标跟踪[J]. 吉林大学学报:工学版,2009,39(6):1585⁃1589. |
| Li Peng , Song Shen⁃min , Chen Xing⁃lin , et al . Iterative Sigma point filter in target tracking on reentry[J]. Journal of Jilin University(Engineering and Technology Edition), 2009, 39(6): 1585⁃1589. | |
| 4 | Li Fu⁃liang , Zhang Rong⁃hui , You Feng . Fast pedestrian detection and dynamic tracking for intelligent vehicles within V2V cooperative environment[J]. Iet Image Processing,2017,11(10):833⁃840. |
| 5 | Kwak J Y , Ko B , Nam J Y . Pedestrian tracking using online boosted random ferns learning in far⁃infrared imagery for safe driving at night[J]. IEEE Transactions on Intelligent Transportation Systems,2017,18(1):1⁃13. |
| 6 | Lee J Y , Yu W . Moving object tracking in driving environment[C]∥8th International Conference on Ubiquitous Robots & Ambient Intelligence,Incheon,Korea,2011:139⁃141. |
| 7 | Fan Zi⁃pei , Wang Ze⁃liang , Cui Jin⁃shi , et al . Monocular pedestrian tracking from a moving vehicle[C]∥Asian Conference on Computer Vision,2012:335⁃346. |
| 8 | Guo Lie , Li Lin⁃hui , Zhao Yi⁃bing , et al . Pedestrian tracking based on camshift with kalman prediction for autonomous vehicle[J]. International Journal of Advanced Robotic Systems,2016,13(3):1⁃9. |
| 9 | 郭烈,张广西,葛平淑,等 . 基于特征组合粒子滤波的行人跟踪方法[J]. 计算机应用与软件,2013,30(11):4⁃7. |
| Guo Lie , Zhang Guang⁃xi , Ge Ping⁃shu ,et al . Pedestrian tracking based on particle filter with features combination[J], Computer Applications and Software,2013,30(11):4⁃7. | |
| 10 | 李锴,冯瑞 . 基于粒子滤波的多特征融合视频行人跟踪算法[J]. 计算机工程,2012,38(24):141⁃145. |
| Li Kai , Feng Rui . Pedestrian tracking algorithm in video of multi⁃feature fusion based on particle filter[J]. Computer Engineering,2012,38(24):141⁃145. | |
| 11 | Xuan T N , Thomas M , Alois K . Robust pedestrian detection and tracking from a moving vehicle[J]. Proceedings of the SPIE,2011,7878(6):536⁃547. |
| 12 | Galoogahi H K , Fagg A , Lucey S . Learning background⁃aware correlation filters for visual tracking[J/OL].[2018⁃02⁃26].http:∥ci2cv.net/media/papers/436.pdf. |
| 13 | 李志慧,胡永利,赵永华,等 . 基于车载的运动行人区域估计方法[J]. 吉林大学学报:工学版,2018,48(3):694⁃703. |
| Li Zhi⁃hui , Hu Yong⁃li , Zhao Yong⁃hua , et al . Locating moving pedestrian from running vehicle[J]. Journal of jilin University(Engineering and Technology Edition),2018,48(3):694⁃703. | |
| 14 | Enzweiler M , Gavrila D M . Monocular pedestrian detection: survey and experiments[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2009,31(12):2179⁃2195. |
| 15 | Wu Y , Lim J , Yang M H . Object Tracking Benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,37(9):1834⁃1848. |
| 16 | Bolme D S , Beveridge J R , Draper B A , et al . Visual object tracking using adaptive correlation filters[C]∥2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Francisco San , CA, USA ,2010:1⁃10. |
| 17 | Henriques J F , Caseiro R , Martins P . High⁃speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,37(3):583⁃596. |
| 18 | Henriques J F , Caseiro R , Martins P , et al . Exploiting the circulant structure of tracking⁃by⁃detection with kernels[J]. Lecture Notes in Computer Science,2012,7575:702⁃715. |
| 19 | Kiani H , Sim T , Lucey S . Correlation filters with limited boundaries[J]. 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, Massachusetts,2015:4630⁃4638. |
| 20 | Boyd S , Parikh N , Chu E , et al . Distributed optimization and statistical learning via the alternating direction method of multipliers[J]. Foundations & Trends in Machine Learning, 2010,3(1):1⁃122. |
| 21 | Sherman J , Morrison W J . Adjustment of an inverse matrix corresponding to a change in one element of a given matrix[J]. Annals of Mathematical Statistics,1950,21(1):124⁃127. |
| 22 | Pathan S S , Al⁃Hamadi A , Michaelis B . Intelligent feature⁃guided multi⁃object tracking using kalman filter[C]∥2nd International Conference on Computer,Control and Communication,Karachi,Pakistan,2009:1⁃6. |
| [1] | 白乔文,曲昭伟,陈永恒,熊帅,陶楚青. 非严格优先权下无左转专用相位直行车辆轨迹模型建立[J]. 吉林大学学报(工学版), 2019, 49(3): 673-679. |
| [2] | 曹宁博,赵利英,曲昭伟,陈永恒,白乔文,邓晓磊. 考虑双向行人跟随行为的社会力模型[J]. 吉林大学学报(工学版), 2019, 49(3): 688-694. |
| [3] | 罗小芹,王殿海,金盛. 面向混合交通的感应式交通信号控制方法[J]. 吉林大学学报(工学版), 2019, 49(3): 695-704. |
| [4] | 陈磊,王江锋,谷远利,闫学东. 基于思维进化优化的多源交通数据融合算法[J]. 吉林大学学报(工学版), 2019, 49(3): 705-713. |
| [5] | 凃强,程琳,林芬,孙超. 考虑出行者风险态度的最优路径搜索[J]. 吉林大学学报(工学版), 2019, 49(3): 720-726. |
| [6] | 尹超英,邵春福,王晓全. 考虑停车可用性的建成环境对小汽车通勤出行的影响[J]. 吉林大学学报(工学版), 2019, 49(3): 714-719. |
| [7] | 陈永恒,刘芳宏,曹宁博. 信控交叉口行人与提前右转机动车冲突影响因素[J]. 吉林大学学报(工学版), 2018, 48(6): 1669-1676. |
| [8] | 常山,宋瑞,何世伟,黎浩东,殷玮川. 共享单车故障车辆回收模型[J]. 吉林大学学报(工学版), 2018, 48(6): 1677-1684. |
| [9] | 曲大义,杨晶茹,邴其春,王五林,周警春. 基于干线车流排队特性的相位差优化模型[J]. 吉林大学学报(工学版), 2018, 48(6): 1685-1693. |
| [10] | 刘兆惠, 王超, 吕文红, 管欣. 基于非线性动力学分析的车辆运行状态参数数据特征辨识[J]. 吉林大学学报(工学版), 2018, 48(5): 1405-1410. |
| [11] | 宗芳, 齐厚成, 唐明, 吕建宇, 于萍. 基于GPS数据的日出行模式-出行目的识别[J]. 吉林大学学报(工学版), 2018, 48(5): 1374-1379. |
| [12] | 刘翔宇, 杨庆芳, 隗海林. 基于随机游走算法的交通诱导小区划分方法[J]. 吉林大学学报(工学版), 2018, 48(5): 1380-1386. |
| [13] | 钟伟, 隽志才, 孙宝凤. 不完全网络的城乡公交一体化枢纽层级选址模型[J]. 吉林大学学报(工学版), 2018, 48(5): 1387-1397. |
| [14] | 宗芳, 路峰瑞, 唐明, 吕建宇, 吴挺. 习惯和路况对小汽车出行路径选择的影响[J]. 吉林大学学报(工学版), 2018, 48(4): 1023-1028. |
| [15] | 栾鑫, 邓卫, 程琳, 陈新元. 特大城市居民出行方式选择行为的混合Logit模型[J]. 吉林大学学报(工学版), 2018, 48(4): 1029-1036. |
|
||