吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (4): 1288-1292.doi: 10.13229/j.cnki.jdxbgxb20180217
• • 上一篇
可实现车辆稳定性控制的滑模变结构策略
李寿涛1( ),李秋媛1,刘辉1,丁辉1,田彦涛1,于丁力2
),李秋媛1,刘辉1,丁辉1,田彦涛1,于丁力2
- 1. 吉林大学 通信工程学院,长春 130022
2. 利物浦约翰摩尔大学 工程与技术学院,英国 利物浦 L3 3AF
Sliding mode variable structure strategy for vehicle stability control
Shou⁃tao LI1(),Qiu⁃yuan LI1,Hui LIU1,Hui DING1,Yan⁃tao TIAN1,Ding⁃li YU2
- 1. College of Communication Engineering,Jilin University,Changchun 130022,China
2. School of Engineering,Liverpool John Moores University,Liverpool L3 3AF,UK
摘要:
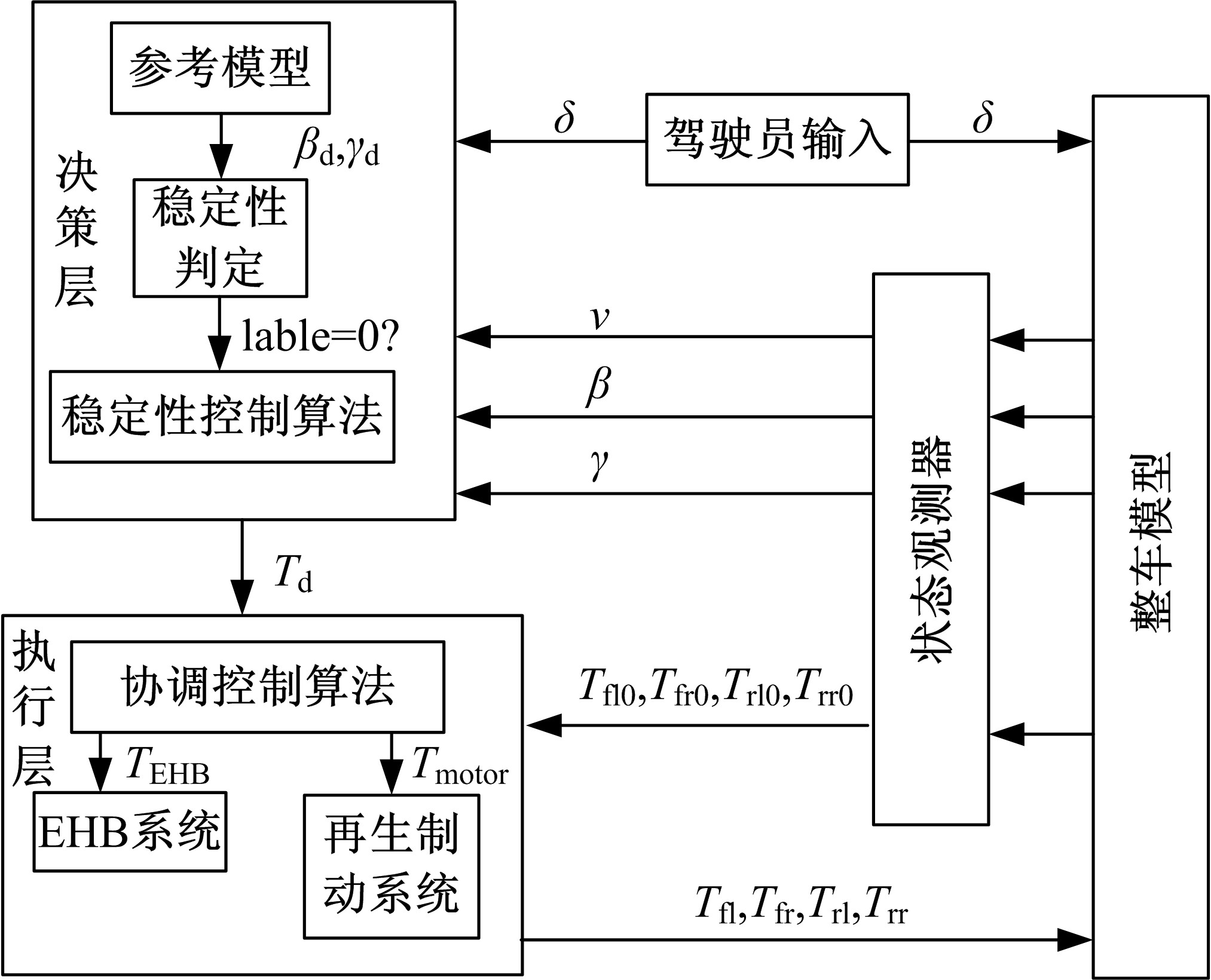
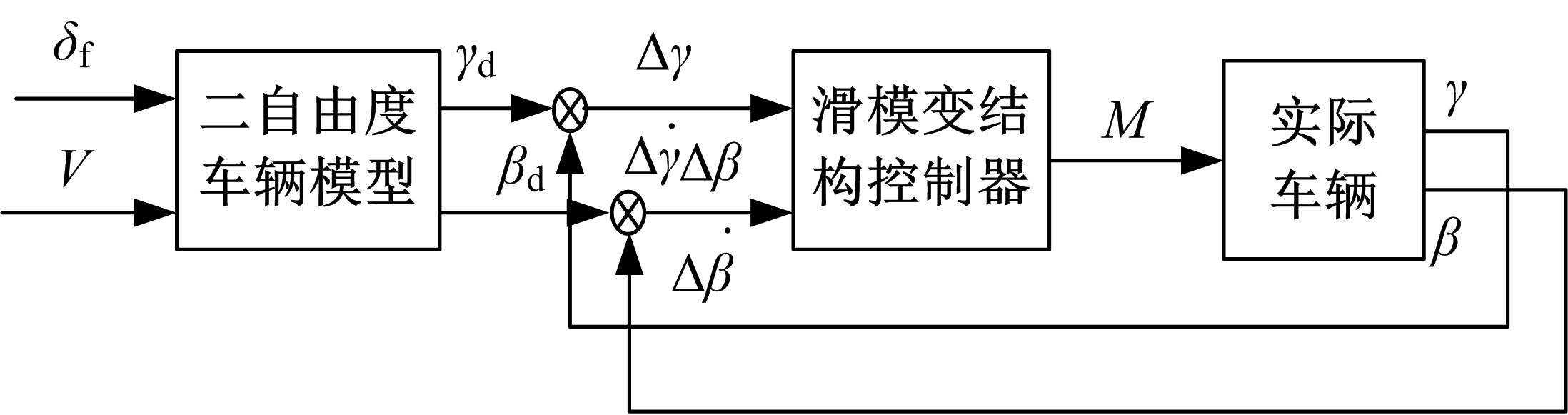
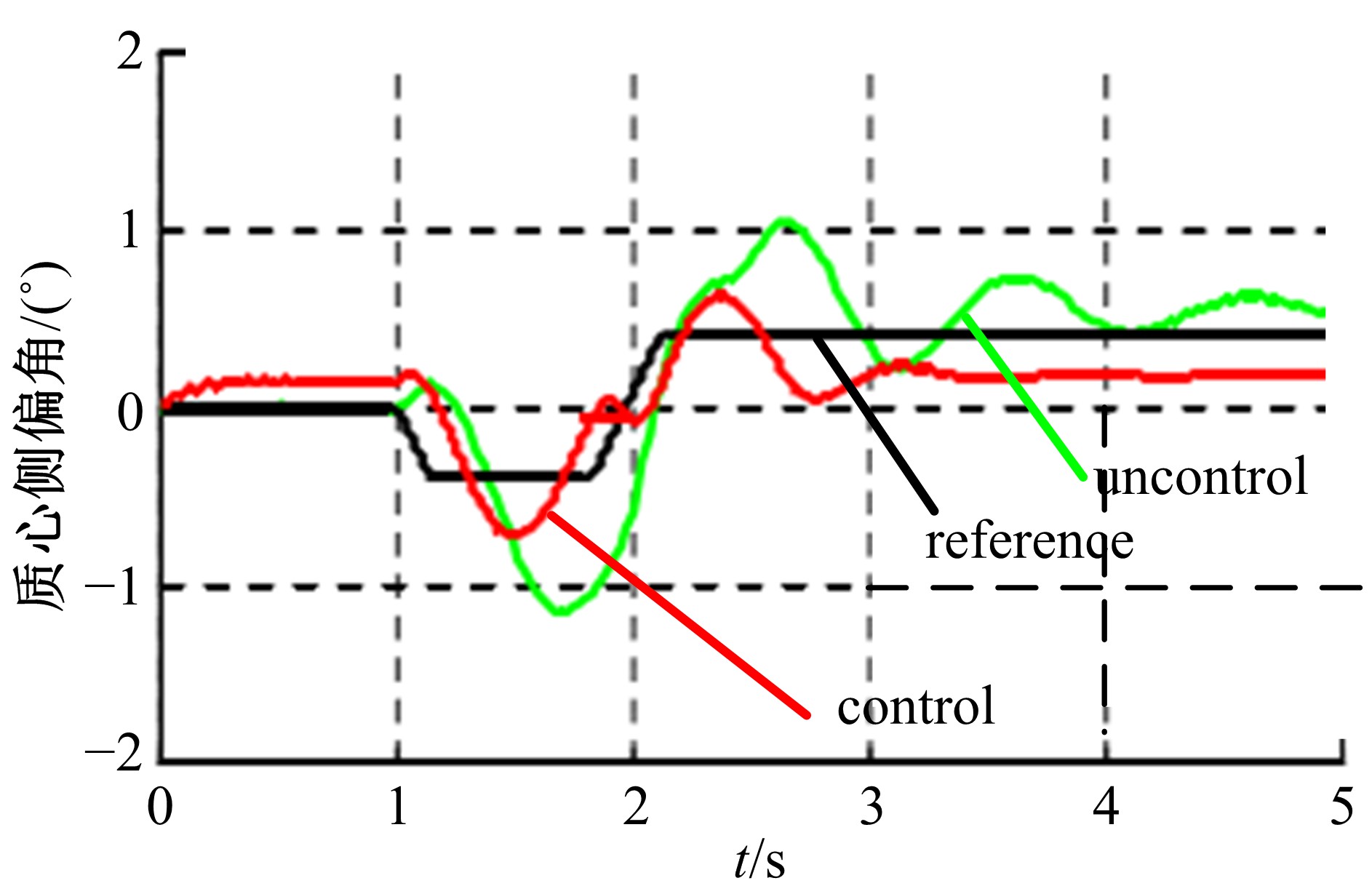
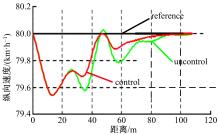
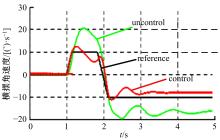
针对横摆角速度及质心侧偏角在车辆稳定控制中的重要作用,提出一种分层结构,在上层系统采用滑模变结构策略对汽车稳定性进行操纵。参考二自由度车辆模型计算控制变量名义值,针对横摆角速度及质心侧偏角偏差和偏差导数,设计汽车稳定操纵系统,由控制参量决策出最优附加横摆力矩。利用李雅普诺夫判定方法判断所设计的闭环系统的稳定性。试验结果表明,本文设计的滑膜变结构控制器在紧急工况下能够明显改善车辆稳定性能,提高行车安全。
中图分类号:
- U463





| 1 | JieJ, KhajepourA, MelekW W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952⁃964. |
| 2 | LiuZhen⁃yu,PuLin, ZhuKong⁃lin, et al. Design and evaluation of V2X communication system for vehicle and pedestrian safety[J]. The Journal of China Universities of Posts and Telecommunications, 2015,22(6): 18⁃26. |
| 3 | 丁辉. 混合动力汽车制动协调及稳定性控制策略研究[D]. 长春:吉林大学通信工程学院,2017. |
| DingHui. Research on braking coordination and stability control strategy of hybrid electric vehicle[D]. Changchun: College of Communication Engineering, Jilin University, 2017. | |
| 4 | AlipouriY, AlipourH. Attenuating noise effect on yaw rate control of independent drive electric vehicle using minimum variance controller[J]. Nonlinear Dynamics, 2017, 87(3): 1637⁃1651. |
| 5 | DingShi⁃hong, LiuLu, ZhengWei⁃xing. Sliding mode direct yaw⁃moment control design for in⁃wheel electric vehicles[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6752⁃6762. |
| 6 | XiaXin, XiongLu, HouYu⁃ye, et al. Vehicle stability control based on driver's emergency alignment intention recognition[J]. International Journal of Automotive Technology, 2017, 18(6): 993⁃1006. |
| 7 | JalaliM, KhosravaniS, KhajepourA, et al. Model predictive control of vehicle stability using coordinated active steering and differential brakes[J]. Mechatronics, 2017, 48: 30⁃41. |
| 8 | RenHong⁃bin, ChenSi⁃zhong, ZhaoYu⁃zhuang. Longitudinal speed control algorithm to improve the vehicle stability and mobility on a sharp curve[J]. Journal of Beijing Institute of Technology, 2016,25(4): 441⁃447. |
| 9 | NahidiA, KasaiezadehA, KhosravaniS, et al. Modular integrated longitudinal and lateral vehicle stability control for electric vehicles[J]. Mechatronics, 2017, 44: 60⁃70. |
| 10 | YoonM Y, BaekS H, BooK S, et al. Map⁃based control method for vehicle stability enhancement[J]. Journal of Central South University, 2015, 22(1): 114⁃120. |
| 11 | 高玉, 申焱华, 刘相新, 等. 计及转角影响的八轴独立电驱车稳定性控制[J]. 汽车工程, 2016, 38(4): 403⁃409. |
| GaoYu, ShenYan⁃hua, LiuXiang⁃xin, et al. Stability control for eight⁃axle independent in⁃wheel motor | |
| drive vehicle considering the effects of steering angle[J]. Automotive Engineering, 2016, 38(4): 403⁃409. | |
| 12 | 张宝珍, 阿米尔, 谢晖. 基于主动脉冲后轮转向的侧翻稳定性仿真与试验[J]. 汽车工程, 2016, 38(7): 857⁃864. |
| ZhangBao⁃zhen, KhajepourAmir , XieHui. Simulation and test of rollover stability based on rear wheel pulsed active steering[J]. Automotive Engineering, 2016, 38(7): 857⁃864. |
| [1] | 李静,石求军,刘鹏,户亚威. 基于纵向车速估算的商用车ABS神经网络滑模控制[J]. 吉林大学学报(工学版), 2019, 49(4): 1017-1025. |
| [2] | 杨顺,蒋渊德,吴坚,刘海贞. 基于多类型传感数据的自动驾驶深度强化学习方法[J]. 吉林大学学报(工学版), 2019, 49(4): 1026-1033. |
| [3] | 陈鑫,李铭,阮新建,王宁,王佳宁. 基于浸入单元法和延迟分离涡模型的Ahmed车模尾流涡旋结构[J]. 吉林大学学报(工学版), 2019, 49(4): 1034-1042. |
| [4] | 周华,杨志刚,朱晖. 基于整车风洞试验的MIRA车型数值计算[J]. 吉林大学学报(工学版), 2019, 49(4): 1043-1053. |
| [5] | 陈吉清,刘蒙蒙,兰凤崇. 三元动力电池及其成组后的过充安全性试验[J]. 吉林大学学报(工学版), 2019, 49(4): 1072-1080. |
| [6] | 柳润东,毛军,郗艳红,张宏宇,彭飞. 横风下高速列车会车压力波对风障的气动冲击[J]. 吉林大学学报(工学版), 2019, 49(4): 1054-1062. |
| [7] | 秦国锋,那景新,慕文龙,谭伟,栾建泽,申浩. 高温老化对CFRP/铝合金粘接接头失效的影响[J]. 吉林大学学报(工学版), 2019, 49(4): 1063-1071. |
| [8] | 张立斌,吴岛,单洪颖,邓祥敬. 基于制动试验台架的多轴车轴荷自调系统设计[J]. 吉林大学学报(工学版), 2019, 49(4): 1081-1091. |
| [9] | 常成,宋传学,张雅歌,邵玉龙,周放. 双馈电机驱动电动汽车变频器容量最小化[J]. 吉林大学学报(工学版), 2018, 48(6): 1629-1635. |
| [10] | 席利贺,张欣,孙传扬,王泽兴,姜涛. 增程式电动汽车自适应能量管理策略[J]. 吉林大学学报(工学版), 2018, 48(6): 1636-1644. |
| [11] | 何仁,杨柳,胡东海. 冷藏运输车太阳能辅助供电制冷系统设计及分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1645-1652. |
| [12] | 那景新,慕文龙,范以撒,谭伟,杨佳宙. 车身钢-铝粘接接头湿热老化性能[J]. 吉林大学学报(工学版), 2018, 48(6): 1653-1660. |
| [13] | 刘玉梅,刘丽,曹晓宁,熊明烨,庄娇娇. 转向架动态模拟试验台避撞模型的构建[J]. 吉林大学学报(工学版), 2018, 48(6): 1661-1668. |
| [14] | 宋大凤, 吴西涛, 曾小华, 杨南南, 李文远. 基于理论油耗模型的轻混重卡全生命周期成本分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1313-1323. |
| [15] | 朱剑峰, 张君媛, 陈潇凯, 洪光辉, 宋正超, 曹杰. 基于座椅拉拽安全性能的车身结构改进设计[J]. 吉林大学学报(工学版), 2018, 48(5): 1324-1330. |
|
||