吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (2): 413-420.doi: 10.13229/j.cnki.jdxbgxb20210707
电动载货三轮车风险行为及影响因素分析
贺宜1,2( ),孙昌鑫1,2,彭建华3,吴超仲1,2,江亮4,马明5
),孙昌鑫1,2,彭建华3,吴超仲1,2,江亮4,马明5
- 1.武汉理工大学 智能交通系统研究中心,武汉 430063
2.武汉理工大学 水路公路交通安全控制与装备教育部工程研究中心,武汉 430063
3.交通运输部科学研究院,北京 100029
4.交通运输部 中国交通通信信息中心,北京 100011
5.交通运输部 运输服务司,北京 100736
Risk behaviors and influencing factors of cargo electric tricycles
Yi HE1,2(),Chang-xin SUN1,2,Jian-hua PENG3,Chao-zhong WU1,2,Liang JIANG4,Ming MA5
- 1.Intelligent Transportation Systems Research Center,Wuhan University of Technology,Wuhan 430063,China
2.Engineering Research Center of Waterway and Highway Traffic Safety Control and Equipment,Ministry of Education,Ministry of Education,Wuhan University of Technology,Wuhan 430063,China
3.China Academy of Transportation Sciences,Ministry of Transport,Beijing 100029,China
4.China Transport Telecommunications & Information Center,Ministry of Transport,Beijing 100011,China
5.Department of Transport Services,Ministry of Transport,Beijing 100736,China
摘要:
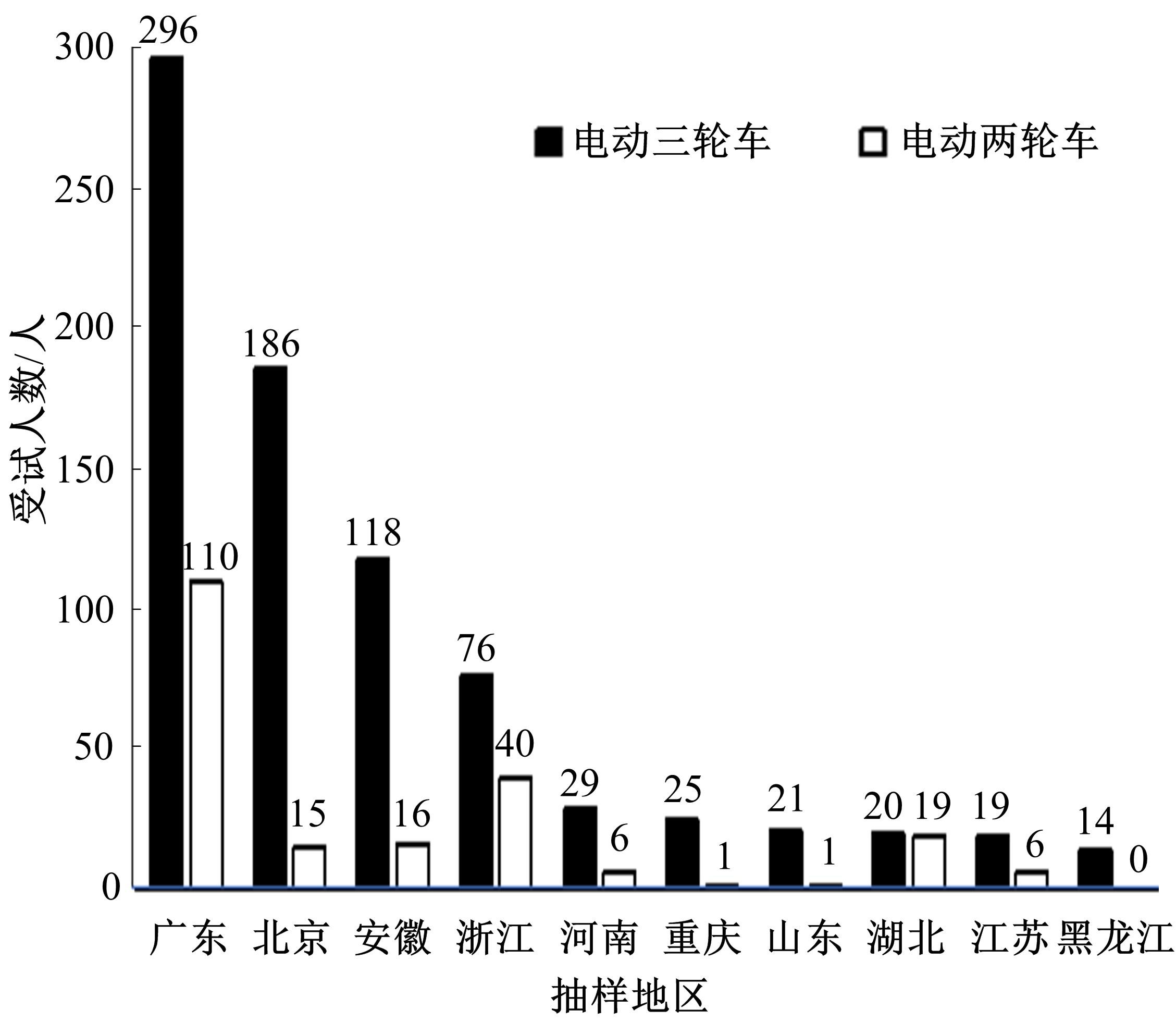
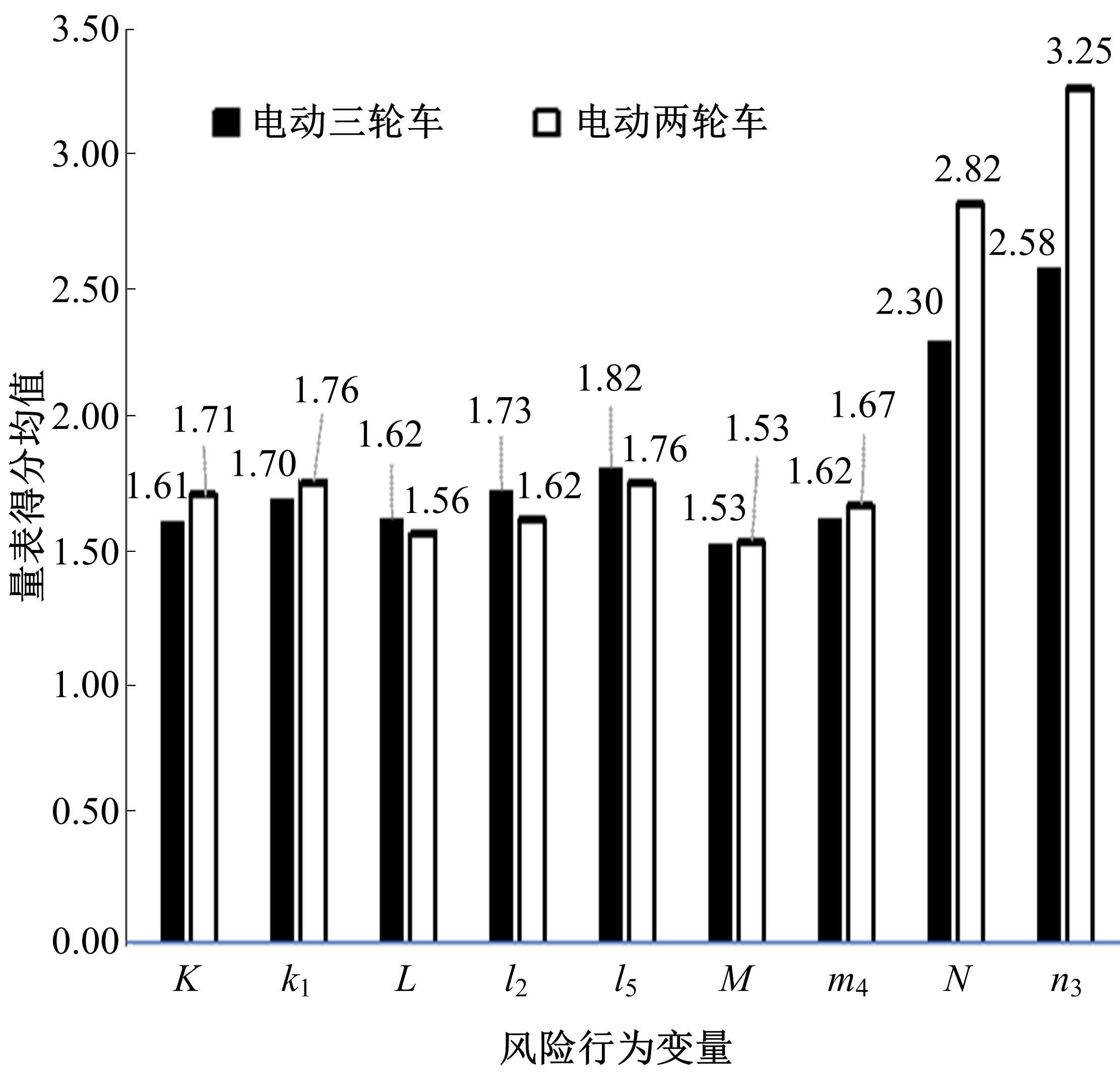
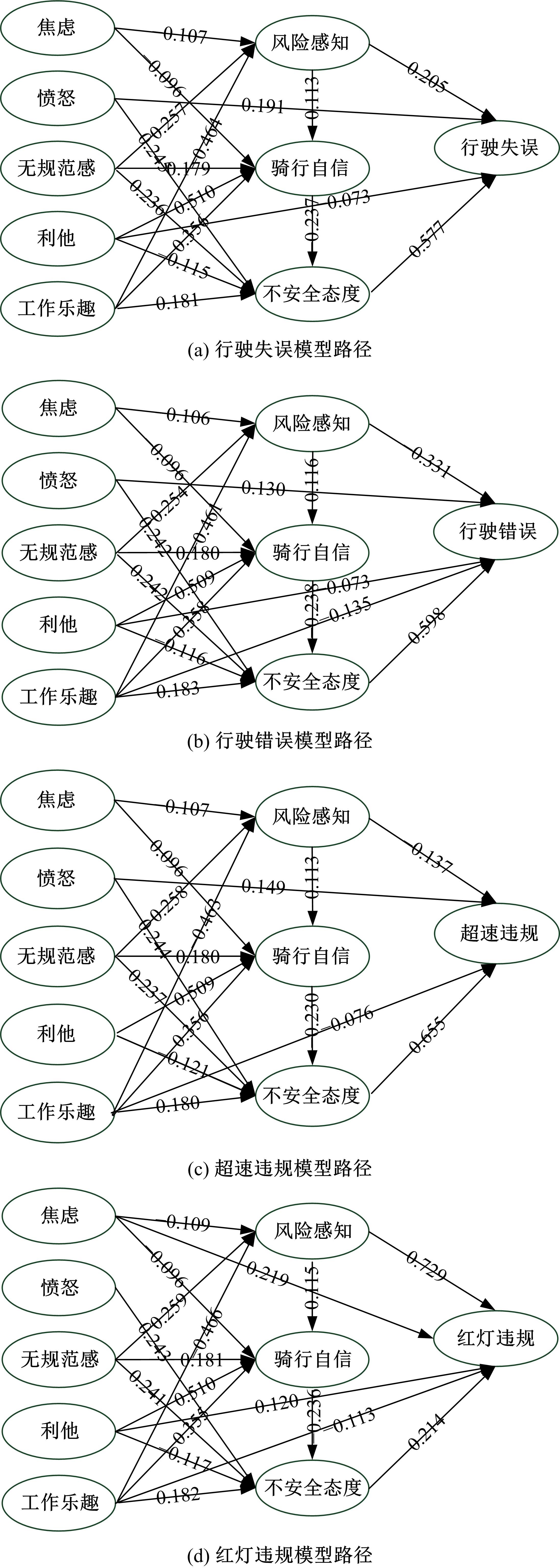
为探究电动载货三轮车群体风险驾驶行为的行为特征及其影响因素,设计并实施了“个性特质-态度/感知-行为”风险行为影响因素问卷量表,分析了906名电动载货三轮车骑行者和280名对照组,数据采用结构方程模型建立了道路行驶失误、道路行驶错误、超速违规和红灯违规4类风险行为模型,基于样本数据的信息熵对风险因素二次赋权,分析各因素对电动载货三轮车骑行风险行为的影响机制。结果表明:容易愤怒(β=0.332,0.309)且利他性差(β=-0.215,-0.156)者易发生行驶错误和超速违规的行为;容易愤怒(β=0.275),无规范感较强(β=0.164)且利他性差(β=-0.209)者容易发生行驶失误类风险行为;焦虑程度高(β=0.144)且无规范感强(β=0.231)者容易发生红灯违规类风险行为;安全态度差者容易发生所有风险行为。失误、错误、超速、红灯4类风险行为的综合风险得分分别为0.367、0.176、0.321、0.136。
中图分类号:
- U491.254



| 1 | 傅志寰, 孙永福, 翁孟勇, 等. 交通强国战略研究[M]. 北京: 人民交通出版社, 2019. |
| 2 | 严新平, 吴兵, 贺宜, 等. 我国零死亡愿景交通安全理念[J]. 交通信息与安全, 2019(1): 1-6. |
| Yan Xin-ping, Wu Bing, He Yi, et al. A study of "Version Zero" concept of transportation safety and its implementation strategies in China[J]. Journal of Transport Information and Safety, 2019(1): 1-6. | |
| 3 | 第一物流研究院. 电动三轮车在快递行业使用情况报告[R]. 北京: 现代物流报, 2016. |
| 4 | Zhang G, Yau K K W, Chen G. Risk factors associated with traffic violations and accident severity in China[J]. Accident Analysis & Prevention, 2013, 59: 18-25. |
| 5 | Vlahogianni E I, Yannis G, Golias J C. Overview of critical risk factors in power-two-wheeler safety[J]. Accident Analysis & Prevention, 2012, 49: 12-22. |
| 6 | Johnson P, Brooks C, Savage H. Fatal and Serious Road Crashes Involving Motorcyclists[M]. Australia: Department of Infrastructure, Transport, Regional Development and Local Government, 2008. |
| 7 | Zambon F, Hasselberg M. Factors affecting the severity of injuries among young motorcyclists-a Swedish nationwide cohort study[J]. Traffic Injury Prevention, 2006, 7: 143-149. |
| 8 | 江亮, 贺宜. 电动两轮车风险驾驶行为及事故影响因素分析[J]. 吉林大学学报: 工学版, 2019, 49(4): 1107-1113. |
| Jiang Liang, He Yi. Risky driving behavior and influencing factors for electric two-wheeler[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1107-1113. | |
| 9 | Reason J, Manstead A, Stradling S, et al. Errors and violations on the roads: a real distinction?[J]. Ergonomics, 1990, 33(10/11): 1315-1332. |
| 10 | Westerman S J, Haigney D. Individual differences in driver stress, error and violation[J]. Personality and Individual Differences, 2000, 29(5): 981-998. |
| 11 | Chen C. Personality, safety attitudes and risky driving behaviors—evidence from young Taiwanese motorcyclists[J].Accident Analysis & Prevention, 2009, 41(5): 963-968. |
| 12 | Wang C, Xu C, Xia J, et al. The effects of safety knowledge and psychological factors on self-reported risky driving behaviors including group violations for e-bike riders in China[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2018, 56: 344-353. |
| 13 | Ulleberg P, Rundmo T. Personality, attitudes and risk perception as predictors of risky driving behaviour among young drivers[J]. Safety Science, 2003, 41(5): 427-443. |
| 14 | Starkey N J, Isler R B.The role of executive function, personality and attitudes to risks in explaining self-reported driving behaviour in adolescent and adult male drivers[J].Transportation Research Part F:Traffic Psychology and Behaviour,2016,38:127-136. |
| 15 | Yao L, Wu C. Traffic safety for electric bike riders in china: attitudes, risk perception, and aberrant riding behaviors[J]. Transportation Research Record: Journal of the Transportation Research Board, 2012, 2314(1): 49-56. |
| 16 | Mallia L, Lazuras L, Violani C, et al. Crash risk and aberrant driving behaviors among bus drivers: the role of personality and attitudes towards traffic safety[J]. Accident Analysis & Prevention, 2015, 79: 145-151. |
| 17 | Wong J, Chung Y, Huang S. Determinants behind young motorcyclists' risky riding behavior[J]. Accident Analysis & Prevention, 2010, 42(1): 275-281. |
| 18 | Johnson J A. Measuring thirty facets of the five factor model with a 120-item public domain inventory: development of the IPIP-NEO-120[J]. Journal of Research in Personality, 2014(51): 78-89. |
| 19 | Goldbery L R. The development of markers for the big-five factor structure[J]. Psychological Assessment, 1992, 4(1): 26-42. |
| 20 | Anderson J C, Gerbing D W. Structural equation modeling in practice: a review and recommended two-step approach[J]. Psychological Bulletin, 1988, 103(3): 411-423. |
| 21 | 秦浩, 陈景武. 结构方程模型原理及其应用注意事项[J]. 中国卫生统计, 2006(4): 367-369. |
| Qin Hao, Chen Jing-wu. Principles and application considerations of structural equation model[J]. Chinese Journal of Health Statistics, 2006(4): 367-369. | |
| 22 | Hooper D, Coughlan J, Mullen M R. Structural equation modelling: guidelines for determining model fit[J]. Electronic Journal of Business Research Methods, 2008, 1(6): 53-60. |
| 23 | Papantoniou P, Antoniou C, Yannis G, et al. Which factors affect accident probability at unexpected incidents? A structural equation model approach[J]. Journal of Transportation Safety & Security, 2019, 11(5): 544-561. |
| 24 | 吴超仲, 万平, 张晖, 等. 交通从众行为研究——机遇与挑战[J]. 交通信息与安全, 2013, 31(2): 1-5. |
| Wu Chao Zhong, Wan Ping, Zhang Hui, et al. Traffic conformity behavior research—opportunity and challenge[J]. Journal of Transport Information and Safety, 2013, 31(2): 1-5. | |
| 25 | 董春娇,董黛悦,诸葛承祥,等.电动自行车出行特性及骑行决策行为建模[J].吉林大学学报:工学版,2022, 52(11): 2618-2625. |
| Dong Chun-jiao, Dong Dai-yue, Cheng-xiang Zhu-ge, et al. Trip characteristics and decision⁃making behaviors modeling of electric bicycles riding[J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(11): 2618-2625. |
| [1] | 潘恒彦,张文会,梁婷婷,彭志鹏,高维,王永岗. 基于MIMIC与机器学习的出租车驾驶员交通事故诱因分析[J]. 吉林大学学报(工学版), 2023, 53(2): 457-467. |
| [2] | 朱洁玉,马艳丽. 合流区域多车交互风险实时评估方法[J]. 吉林大学学报(工学版), 2022, 52(7): 1574-1581. |
| [3] | 彭涛,方锐,刘兴亮,王海玮,庞彦伟,许洪国,刘福聚,王涛. 基于典型事故场景的雪天高速换道自动驾驶策略[J]. 吉林大学学报(工学版), 2022, 52(11): 2558-2567. |
| [4] | 程国柱,程瑞,徐亮,张文会. 基于乘员伤害分析的公路路侧事故风险评价[J]. 吉林大学学报(工学版), 2021, 51(3): 875-885. |
| [5] | 江亮,贺宜. 电动两轮车风险驾驶行为及事故影响因素分析[J]. 吉林大学学报(工学版), 2019, 49(4): 1107-1113. |
| [6] | 王露,刘玉雯,陈红. 侧风下峡谷桥隧连接段汽车的行驶特性[J]. 吉林大学学报(工学版), 2019, 49(3): 736-748. |
| [7] | 代存杰,李引珍,马昌喜,柴获,牟海波. 不确定条件下危险品配送路线多准则优化[J]. 吉林大学学报(工学版), 2018, 48(6): 1694-1702. |
| [8] | 侯现耀, 陈学武. 基于态度的公交出行信息使用市场细分[J]. 吉林大学学报(工学版), 2018, 48(1): 98-104. |
| [9] | 王芳荣, 郭柏苍, 金立生, 高琳琳, 岳欣羽. 次任务驾驶安全评价指标筛选及其权值计算[J]. 吉林大学学报(工学版), 2017, 47(6): 1710-1715. |
| [10] | 谭立东, 刘丹, 李文军. 基于蝇复眼的交通事故现场全景图像阵列仿生设计[J]. 吉林大学学报(工学版), 2017, 47(6): 1738-1744. |
| [11] | 李显生, 孟祥雨, 郑雪莲, 程竹青, 任圆圆. 非满载罐体内液体冲击动力学特性[J]. 吉林大学学报(工学版), 2017, 47(3): 737-743. |
| [12] | 王占中, 赵利英, 曹宁博. 基于多层编码遗传算法的危险品运输调度模型[J]. 吉林大学学报(工学版), 2017, 47(3): 751-755. |
| [13] | 徐进, 陈薇, 周佳, 罗骁, 邵毅明. 汽车转向盘操作与驾驶负荷的相关性[J]. 吉林大学学报(工学版), 2017, 47(2): 438-445. |
| [14] | 郭应时, 付锐, 赵凯, 马勇, 袁伟. 驾驶人换道意图实时识别模型评价及测试[J]. 吉林大学学报(工学版), 2016, 46(6): 1836-1844. |
| [15] | 孙璐, 徐建, 崔相民. 面板数据模型分析及交通事故预测[J]. 吉林大学学报(工学版), 2015, 45(6): 1771-1778. |
|