吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (8): 2410-2420.doi: 10.13229/j.cnki.jdxbgxb.20211121
• 农业工程·仿生工程 • 上一篇
果树株间避障除草机设计与试验
王永烁1( ),康建明1(),彭强吉1,陈英凯2,方会敏1,牛萌萌1,王少伟1
),康建明1(),彭强吉1,陈英凯2,方会敏1,牛萌萌1,王少伟1
- 1.山东省农业机械科学研究院,济南 250110
2.山东省农业科学院,济南 250110
Design and experiment of obstacle avoidance weeding machine for fruit trees
Yong-shuo WANG1(),Jian-ming KANG1(),Qiang-ji PENG1,Ying-kai CHEN2,Hui-min FANG1,Meng-meng NIU1,Shao-wei WANG1
- 1.Shandong Academy of Agricultural Machinery Science,Jinan 250110,China
2.Shandong Academy of Agricultural Sciences,Jinan 250110,China
摘要:
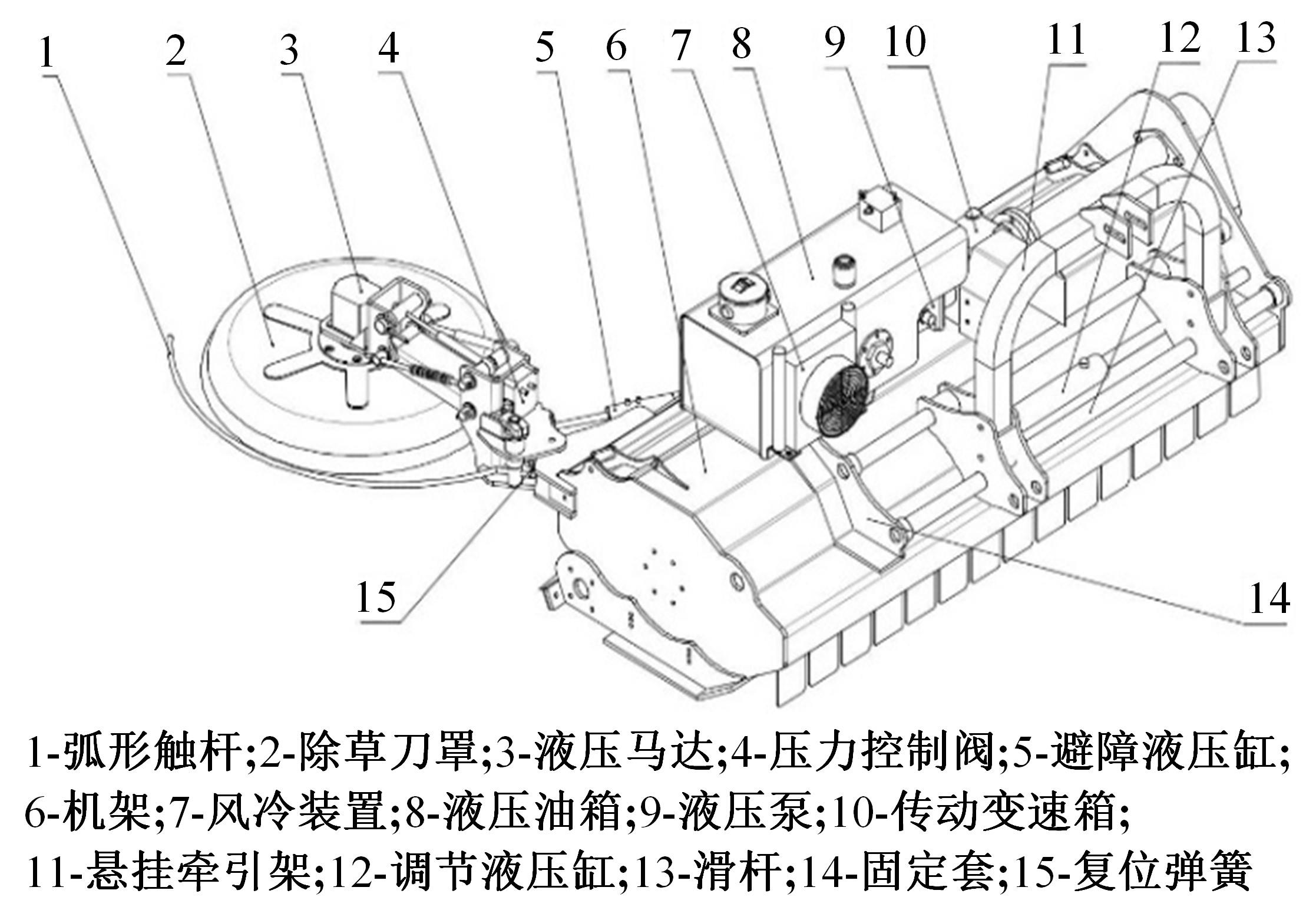
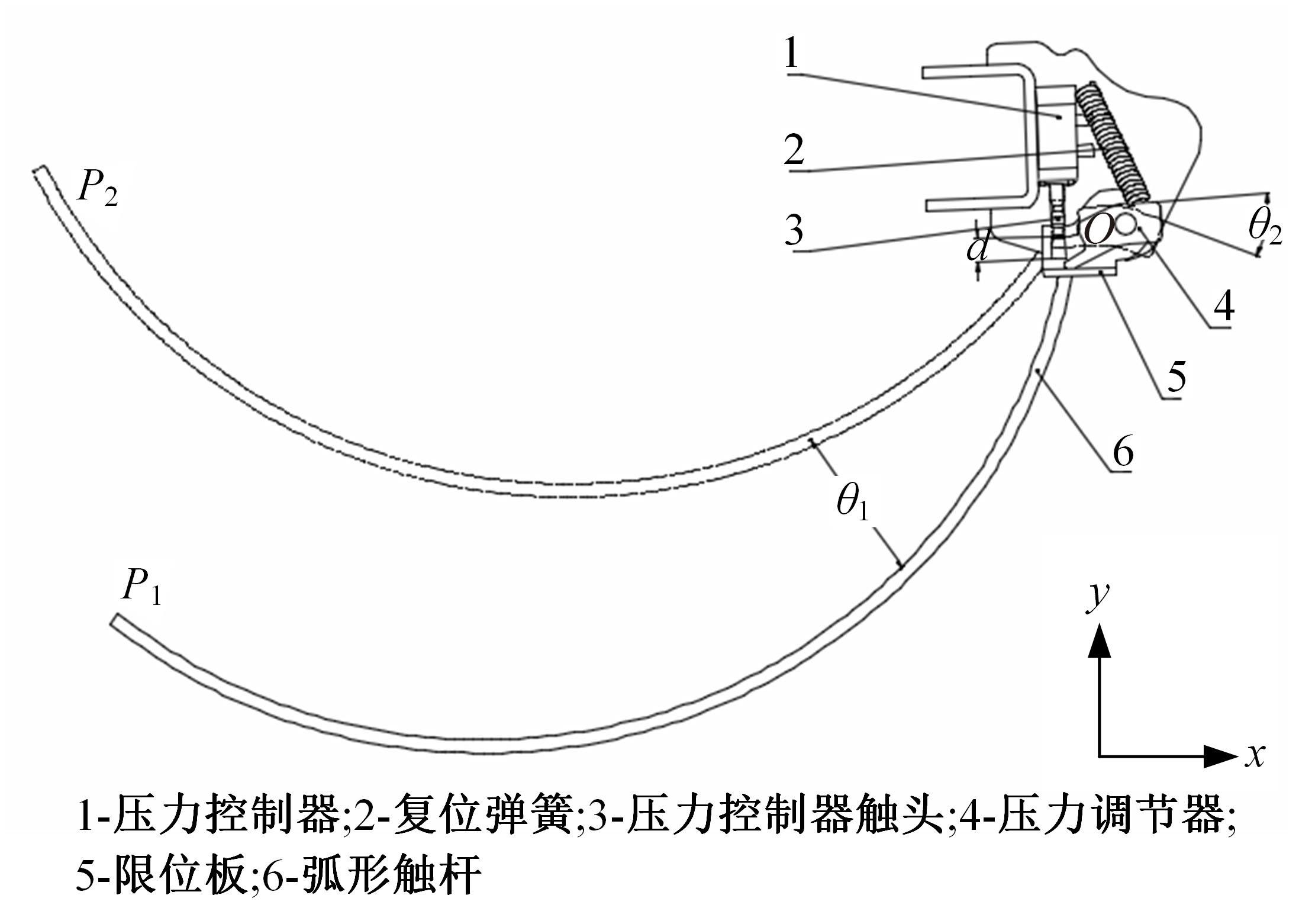
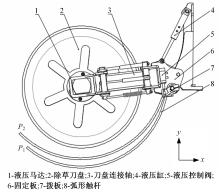
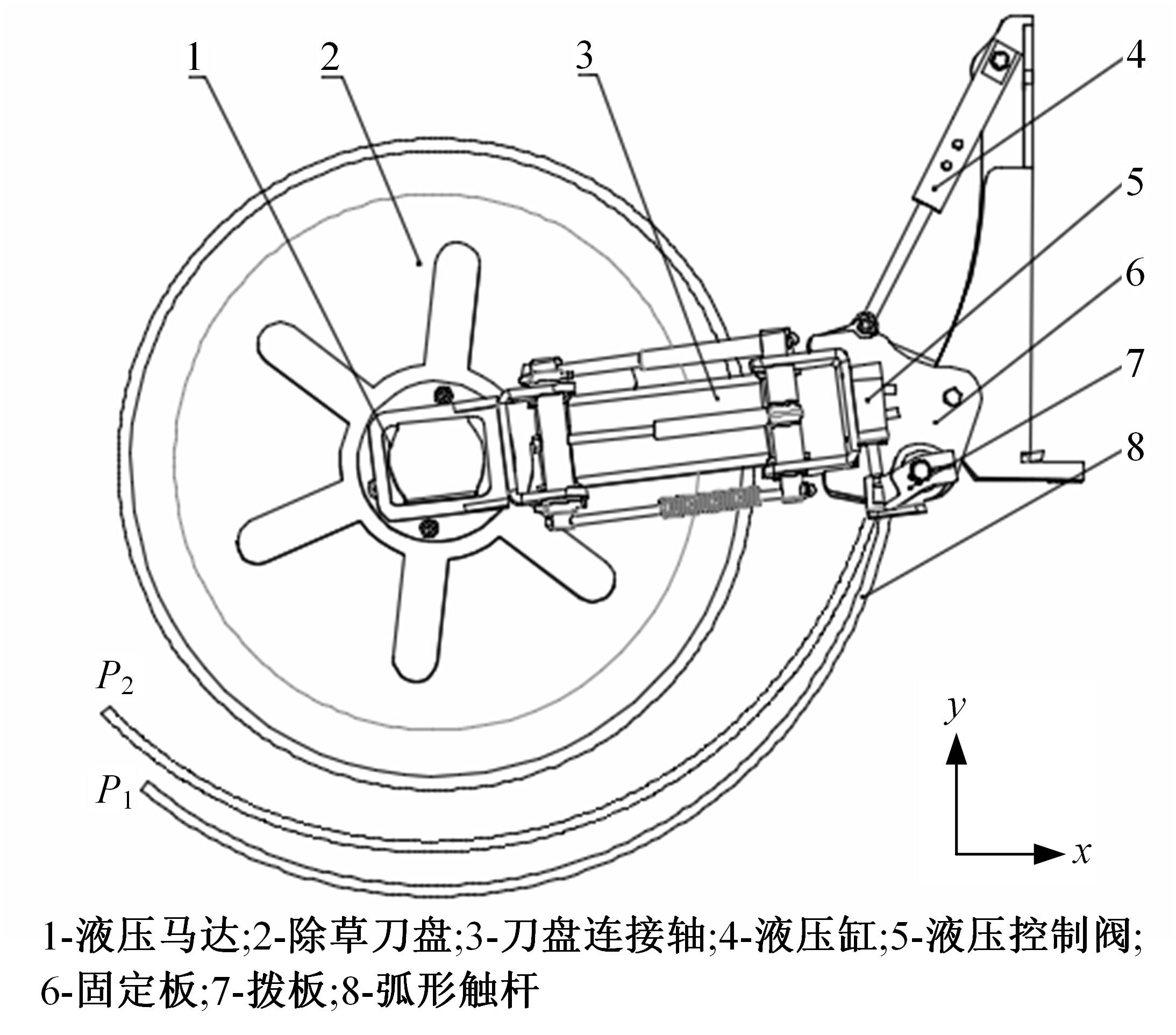
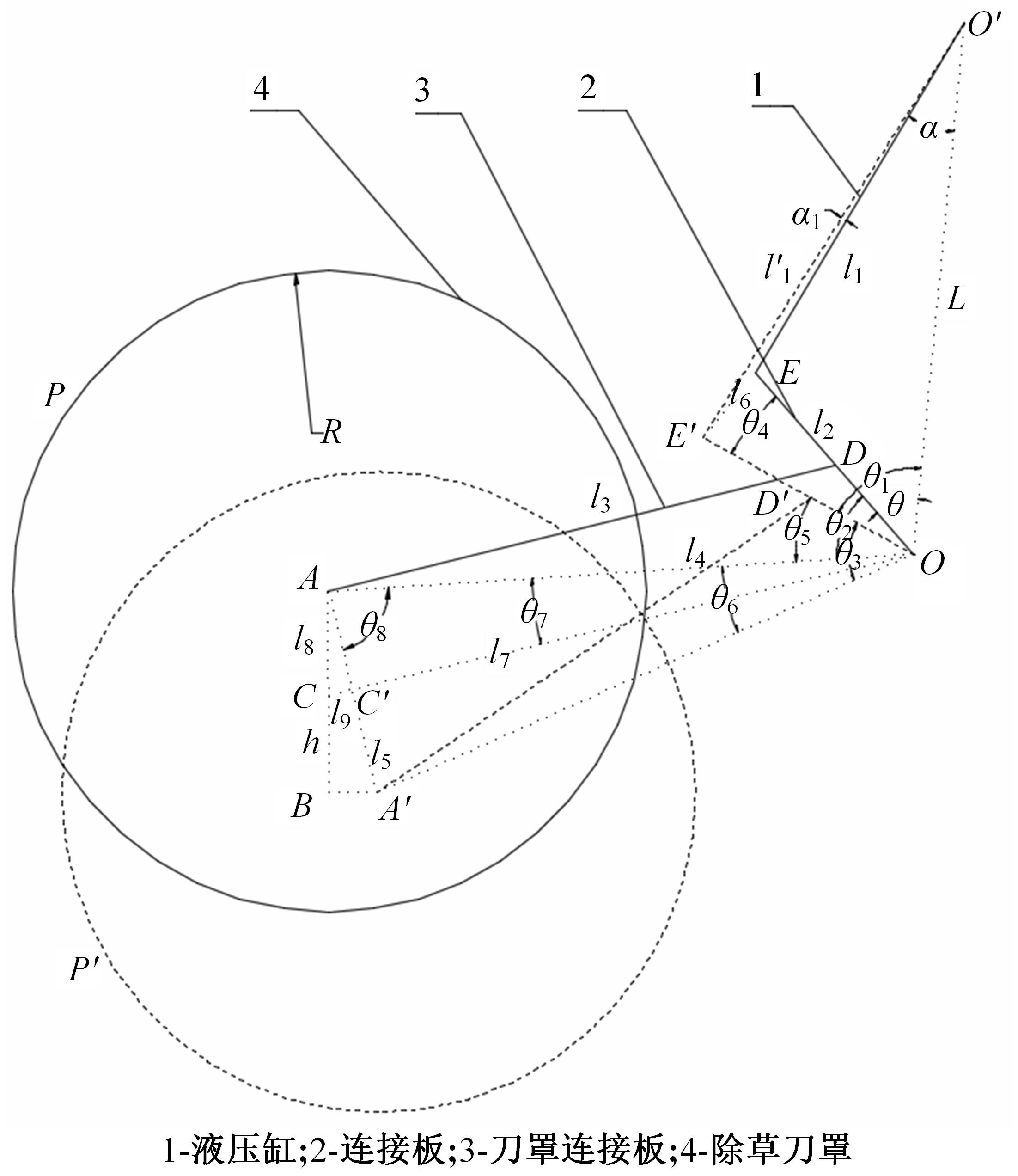
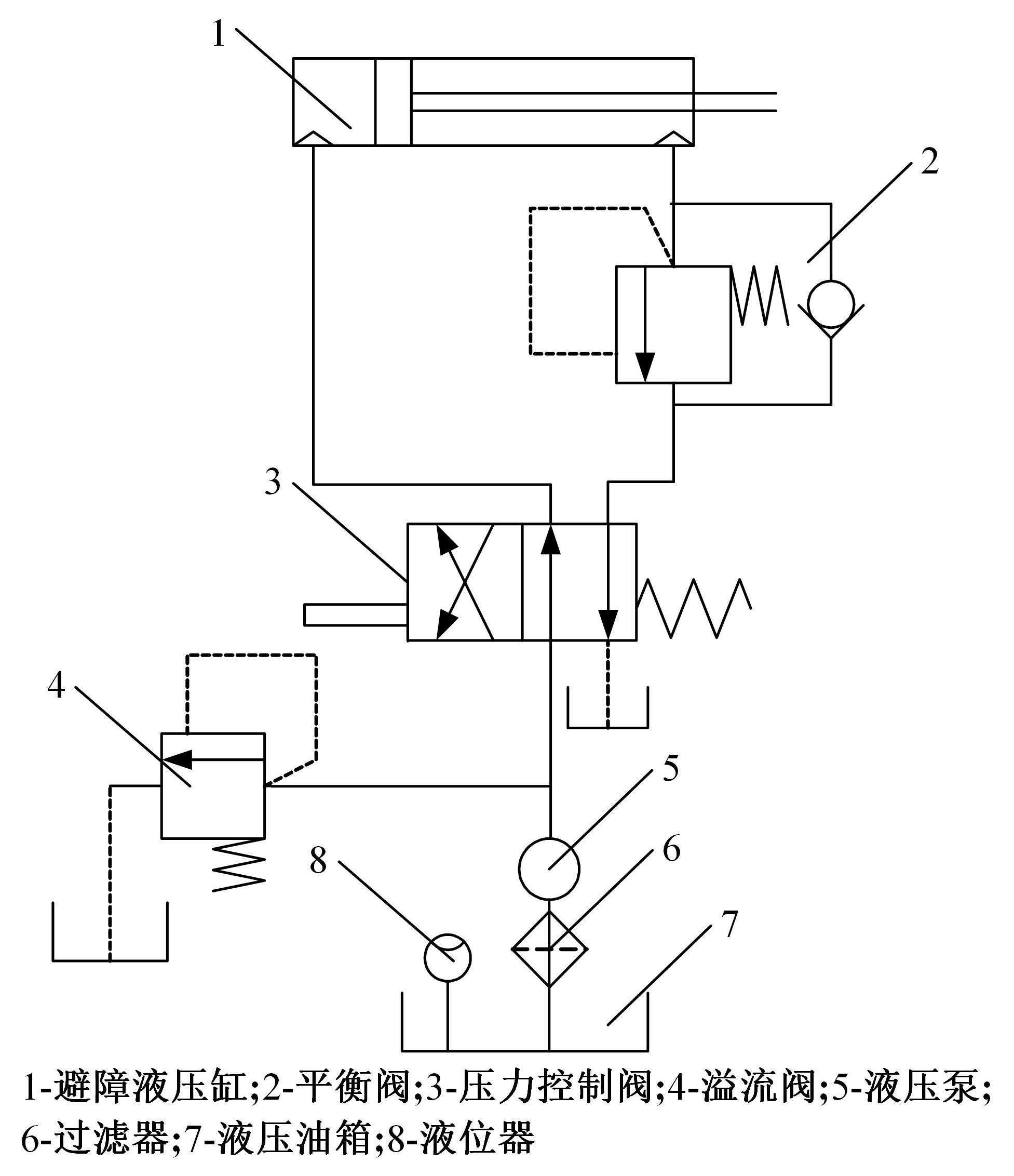
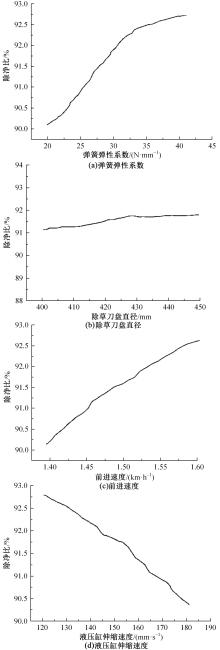
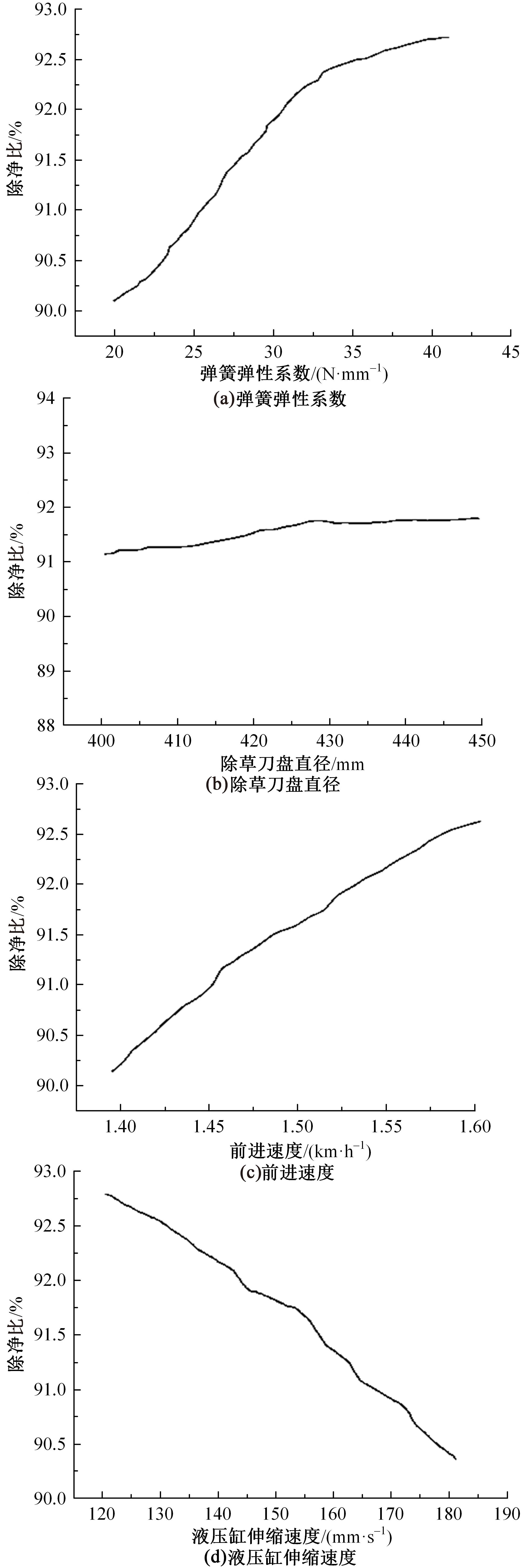
针对果树株间除草作业复杂、杂草除净率低的问题,基于机构往复式伸缩运动思想,设计了一种用于清理果树株间杂草的自动避障除草机。通过对除草机各部件进行理论分析,确定了工作幅宽调节机构、信号采集机构、自动避障机构和除草刀等关键部件的结构及参数。利用弧形触杆和液压系统的协同作用,构建了自动避障控制系统,可根据触杆的不同位置状态,动态控制除草刀避开果树植株。在ADAMS中建立了虚拟样机模型,并进行了单因素仿真试验,确定了影响株间避障除草的关键因素。以避障液压缸速度、机器前进速度和复位弹簧弹性系数作为主要影响因素,杂草除净比为评价指标,利用Box-Benhnken试验设计原理,采用三因素三水平响应面分析方法,设计了二次回归组合试验,建立了杂草除净比的回归模型,得到最优参数分别为:避障液压缸速度126 mm/s,机器前进速度1.57 km/h,弹性系数21。以最优参数进行了田间验证试验,结果表明,所设计的除草机平均杂草除净比为92.65%,达到了果园除草农艺要求。研究结果为果园及其他作物株间除草机的进一步优化提供了参考。
中图分类号:
- S224.1










| 1 | 于威,韩晓梅. 现代化果园机械除草装备与技术应用现状及发展趋向[J].现代农村科技, 2017(6): 97. |
| Yu Wei, Han Xiao-mei. The application status and development trend of modern orchard mechanical weeding equipment and technology[J]. Modern Rural Science and Technology, 2017(6): 97. | |
| 2 | 王奇,周文琪,唐汉,等. 弧齿往复式稻田株间自动避苗除草装置设计与试验[J].农业机械学报,2021, 52(6): 53-61, 72. |
| Wang Qi, Zhou Wen-qi, Tang Han, et al. Design and experiment of arc-tooth reciprocating motion type seedling avoided weeding control device for intertillage paddy[J]. Transactions of the Chinese Society for Agricaltulal Machinery, 2021, 56(6): 53-61, 72. | |
| 3 | Terpstra R, Kouwenhoven J K. Inter-row and intra-row weed-control with a hoe-ridger[J]. Journal of Agricultural Engineering Research, 1981, 26(2): 127-134. |
| 4 | Melander B. Intelligent versus non-intelligent mechanical intra-row weed control in transplanted onion and cabbage[J]. Crop Protection,2015, 72: 1-8. |
| 5 | Norremark M. The development and assessment of the accuracy of an autonomous GPS-based system for intra-row mechanical weed control in row crops[J]. Biosystems Engineering, 2008, 101(4): 396-410. |
| 6 | Norremark M. Evaluation of an autonomous GPS-based systemfor intra-row weed control by assessing the tilled area[J]. Precision Agriculture, 2012, 13(2): 149-162. |
| 7 | Cordill C, Grift T E. Design and testing of an intra-row mechanical weeding machine for corn[J]. Biosystems Engineering, 2011, 110(3): 247-252. |
| 8 | 陈振歆,王金武,牛春亮,等. 弹齿式苗间除草装置关键部件设计与试验[J]. 农业机械学报,2010,41(6): 81-86. |
| Chen Zhen-xin, Wang Jin-wu, Niu Chun-liang, et al. Design and experiment of key components of trash cultivator's working in paddy rice seeding lines[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(6): 81-86. | |
| 9 | 杨松梅,王金武,刘永军,等. 水田株间立式除草装置的设计[J]. 农机化研究,2014, 36(12): 154-157. |
| Yang Song-mei, Wang Jin-wu, Liu Yong-jun, et al. Design and simulation analysis of vertical weed control device between seedlings in paddy field[J]. Journal of Agricultural Mechanization Research, 2014, 36(12): 154-157. | |
| 10 | 韩豹,申建英,李悦梅. 3ZCF-7700 型多功能中耕除草机设计与试验[J]. 农业工程学报,2011, 27(1): 124-129. |
| Han Bao, Shen Jian-ying, Li Yue-mei. Design and experiment of 3ZCF-7700 multi-functional weeding-cultivating machine[J]. Transactions of the Chinese Society of Agricultural Engineering, 2011, 27(1): 124-129. | |
| 11 | 张朋举,张纹,陈树人,等. 八爪式株间机械除草装置虚拟设计与运动仿真[J]. 农业机械学报,2010,41(4): 56-59. |
| Zhang Peng-ju, Zhang Wen, Chen Shu-ren, et al. Virtual design and kinetic simulation for eight claw intra-row mechanical weeding device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(4): 56-59. | |
| 12 | 陈树人,张朋举,尹东富,等. 基于LabVIEW的八爪式机械株间除草装置控制系统[J]. 农工程学报,2010, 26(): 234-237. |
| Chen Shu-ren, Zhang Peng-ju, Yin Dong-fu, et al. Control system of eight claw intra-row mechanical weeding device based on LabVIEW[J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(Sup.2): 234-237. | |
| 13 | 胡炼,罗锡文,张智刚,等. 株间除草装置横向偏移量识别与作物行跟踪控制[J]. 农业工程学报,2013,29(14): 8-14. |
| Hu Lian, Luo Xi-wen, Zhang Zhi-gang, et al. Side-shift offset identification and control of crop row tracking for intra-row mechanical weeding[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(14): 8-14. | |
| 14 | 陈子文,李南,孙哲,等. 行星刷式株间锄草机械手优化与试验[J]. 农业机械学报,2015, 46(9): 94-99. |
| Chen Zi-wen, Li Nan, Sun Zhe, et al. Optimization and experiment of intra-row brush weeding manipulator based on planetary gear train[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(9): 94-99. | |
| 15 | 余涛,蔡晓华,赵德春,等. 智能苗间锄草平台设计[J].农机化研究,2013, 35(11): 30-34. |
| Yu Tao, Cai Xiao-hua, Zhao De-chun, et al. Design of intelligent weeding platform between seedlings[J]. Journal of Agricultural Mechanization Research, 2013, 35(11): 30-34. | |
| 16 | 丛茜,徐金,马博帅,等.基于虚拟仿真的拖拉机后悬挂检测装置设计与实验[J].吉林大学学报:工学版,2021, 51(2): 754-760. |
| Cong Qian, Xu Jin, Ma Bo-shuai, et al. Design and test of tractor hydraulic suspension system testing device based on virtual simulation[J]. Journal of Jilin University (Engineering and Technology Edition),2021, 51(2): 754-760. | |
| 17 | 王新彦,江泉,吕峰,等.基于参数化模型的零转弯半径割草机侧翻稳定性[J].吉林大学学报:工学版,2021, 51(5): 1908-1918. |
| Wang Xin-yan, Jiang Quan, Lv Feng, et al. Rollover stability of zero turning radius lawn mower based on parametric model[J]. Journal of Jilin University (Engineering and Technology Edition),2021, 51(5): 1908-1918. | |
| 18 | 于畅畅,徐丽明,王庆杰,等. 篱架式栽培葡萄双边作业株间自动避障除草机设计与试验[J].农业工程学报,2019, 35(5): 1-9. |
| Yu Chang-chang, Xu Li-ming, Wang Qing-jie, et al. Design and experiment of bilateral operation intra-row auto obstacle avoidance weeder for trellis cultivated grape[J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(5): 1-9. | |
| 19 | 张圣,骆艳洁. 液压系统节能设计[J]. 机床与液压,2007(1): 151-152, 108. |
| Zhang Sheng, Luo Yan-jie. Energy-saving design of hydraulic system[J]. Machine Tool and Hydraulics, 2007(1): 151-152, 108. | |
| 20 | 长广仁藏.旋耕拖拉机基本设计理论[M].北京:机械工业出版社,1978. |
| 21 | 胡友民,杜润生,杨叔子. 液压系统运行状态监测[J]. 液压与气动, 2002(8): 35-37. |
| Hu You-min, Du Run-sheng, Yang Shu-zi. Operation status monitoring of hydraulic system[J]. Hydraulics and Pneumatics, 2002(8): 35-37. | |
| 22 | 郭卫东,李守忠,马璐. ADAMS2013应用实例精解教程[M]. 北京:机械工业出版社,2010. |
| 23 | 李增刚. ADAMS 入门详解与实例[M]. 北京:国防工业出版社,2006. |
| 24 | 康建明,彭强吉,王士国,等. 弹齿式残膜回收机捡拾装置改进设计与试验[J].农业机械学报,2018,49(): 295-303. |
| Kang Jian-ming, Peng Qiang-ji, Wang Shi-guo, et al. Design and experiment on pickup unit of spring-tooth residual plastic film collector[J].Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(Sup.1): 295-303. | |
| 25 | 彭强吉,李成松,康建明,等. 气力式圆筒筛膜杂分离机改进设计与试验[J].农业机械学报,2020, 51(8):126-135. |
| Peng Qiang-ji, Li Cheng-song, Kang Jian-ming, et al. Improved design and test on pneumatic cylinder sieve film hybrid separator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(8): 126-135. |
| [1] | 吕锋,李念,冯壮壮,张杨航. 面向用户的个性化产品服务系统协同过滤推介方法[J]. 吉林大学学报(工学版), 2023, 53(7): 1935-1942. |
| [2] | 王斌,何丙辉,林娜,王伟,李天阳. 基于随机森林特征选择的茶园遥感提取[J]. 吉林大学学报(工学版), 2022, 52(7): 1719-1732. |
| [3] | 耿端阳,孙延成,牟孝栋,张国栋,姜慧新,朱俊科. 基于差速辊的青贮玉米籽粒破碎仿真试验及优化[J]. 吉林大学学报(工学版), 2022, 52(3): 693-702. |
| [4] | 温昌凯,谢斌,宋正河,韩建刚,杨倩雯. 拖拉机耐久性加速结构试验设计方法[J]. 吉林大学学报(工学版), 2022, 52(3): 703-715. |
| [5] | 王国伟,朱庆辉,于海业,黄东岩. 基于数字化农机装备的青贮饲料可追溯系统[J]. 吉林大学学报(工学版), 2022, 52(1): 242-252. |
| [6] | 耿端阳,牟孝栋,张国栋,王宗源,朱俊科,徐海刚. 小麦联合收获机清选机理分析与优化试验[J]. 吉林大学学报(工学版), 2022, 52(1): 219-230. |
| [7] | 梁方,王德成,尤泳,王光辉,王宇兵,张晓明,冯金奎. 草地切根施肥补播复式改良机设计与试验[J]. 吉林大学学报(工学版), 2022, 52(1): 231-241. |
| [8] | 王新彦,江泉,吕峰,易政洋. 基于参数化模型的零转弯半径割草机侧翻稳定性[J]. 吉林大学学报(工学版), 2021, 51(5): 1908-1918. |
| [9] | 钱震杰,金诚谦,袁文胜,倪有亮,张光跃. 柔性脱粒齿杆与谷物含摩擦打击动力学模型[J]. 吉林大学学报(工学版), 2021, 51(3): 1121-1130. |
| [10] | 程超,付君,陈志,任露泉. 玉米籽粒收获机清选筛堵塞规律及脱附试验[J]. 吉林大学学报(工学版), 2021, 51(2): 761-771. |
| [11] | 丛茜,徐金,马博帅,张晓超,陈廷坤. 基于虚拟仿真的拖拉机后悬挂检测装置设计与实验[J]. 吉林大学学报(工学版), 2021, 51(2): 754-760. |
| [12] | 陈学深,黄柱健,马旭,齐龙,方贵进. 水稻机械除草避苗控制系统设计与试验[J]. 吉林大学学报(工学版), 2021, 51(1): 386-396. |
| [13] | 耿端阳,谭德蕾,于兴瑞,苏国粱,王骞,鹿秀凤,金诚谦. 玉米柔性脱粒滚筒脱粒元件设计与试验[J]. 吉林大学学报(工学版), 2020, 50(5): 1923-1933. |
| [14] | 高锐涛,单建,杨洲,文晟,兰玉彬,张泉勇,汪洋. 植保无人机变量喷雾处方图实时解译系统的设计与试验[J]. 吉林大学学报(工学版), 2020, 50(1): 361-374. |
| [15] | 刘恩泽,吴文福. 基于综合指标品质评价算法的单色水果生长状态检测互联网架构[J]. 吉林大学学报(工学版), 2019, 49(6): 2019-2026. |
|
||