吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (5): 1285-1292.doi: 10.13229/j.cnki.jdxbgxb.20220770
• 交通运输工程·土木工程 • 上一篇
考虑多车影响的智能网联车跟驰模型
蒲云1,2,3( ),徐银1,2,3,刘海旭1,2,3(),谭一帆1,2,3,4
),徐银1,2,3,刘海旭1,2,3(),谭一帆1,2,3,4
- 1.西南交通大学 交通运输与物流学院,成都 610031
2.西南交通大学 综合交通大数据应用技术国家工程实验室,成都 611756
3.西南交通大学 综合交通运输智能化国家地方联合工程实验室,成都 610031
4.威斯康星大学 麦迪逊分校 土木与环境工程系,威斯康星州 麦迪逊 53706
An improved car⁃following model for connected and automated vehicles considering impact of multiple vehicles
Yun PU1,2,3(),Yin XU1,2,3,Hai-xu LIU1,2,3(),Yi-fan TAN1,2,3,4
- 1.School of Transportation and Logistics,Southwest Jiaotong University,Chengdu 610031,China
2.National Engineering Laboratory of Application Technology of Integrated Transportation Big Data SWJTU,Southwest Jiaotong University,Chengdu 611756,China
3.National United Engineering Laboratory of Integrated and Intelligent Transportation,Southwest Jiaotong University,Chengdu 610031,China
4.Department of Civil and Environment Engineering,University of Wisconsin-Madison,Madison 53706,USA
摘要:
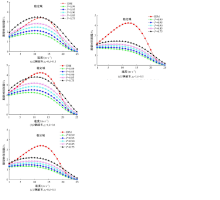
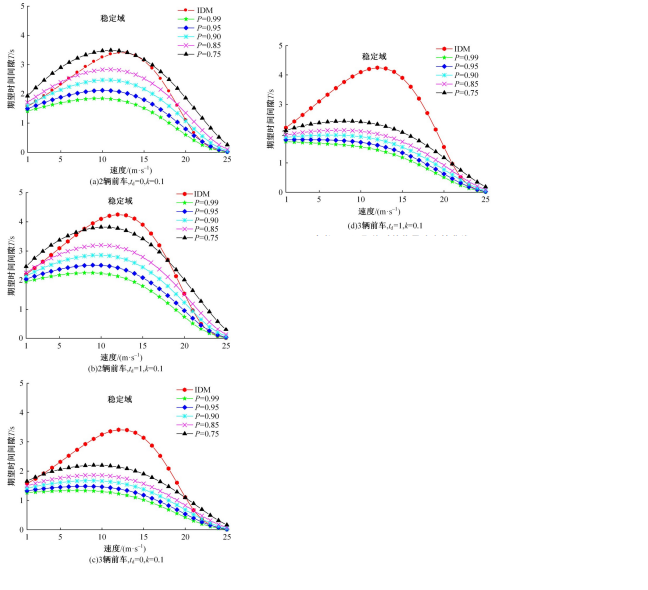
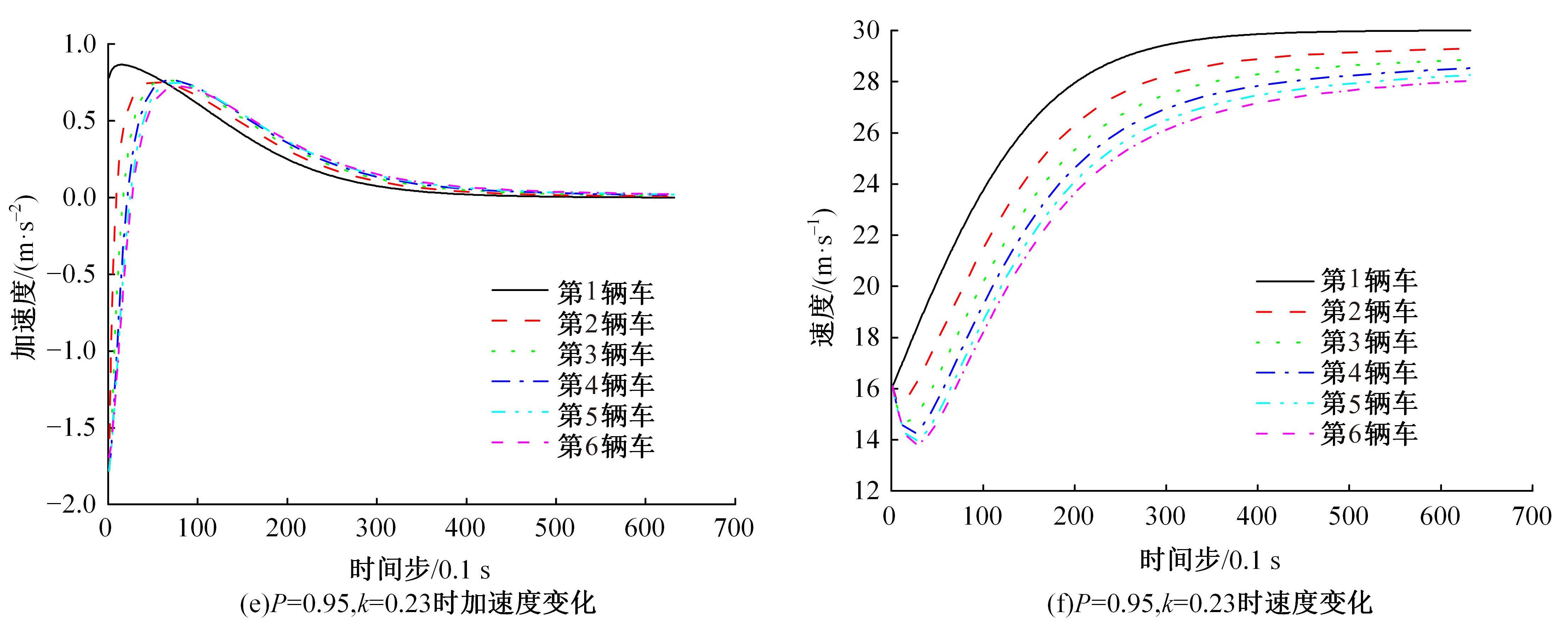
为研究智能网联车(CAV)对交通流的影响,基于智能驾驶人模型(IDM),考虑后车和多前车速度差的影响,构建CAV智能驾驶跟驰模型,推导了CAV跟驰模型的临界稳定性条件。然后以考虑1辆后车和5辆前车速度差的CAV跟驰模型设计数值仿真实验。结果表明:交通流稳定性随考虑后车影响的权重比例变化而变化,即只有当后视权重比例在恰当范围内时才可提高交通流稳定性;考虑后车影响和多前车速度差还可削弱由时延导致的交通流不稳定性。同时,新模型控制下的车辆加速度变化更平稳,更有助于提高交通流稳定性和交通流安全性。
中图分类号:
- U491.1

| 1 | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报,2017, 8(1): 1-14. |
| Li Ke-qiang, Dai Yi-fan, Li Sheng-bo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. | |
| 2 | 宗芳, 石佩鑫, 王猛, 等. 考虑前后多车的网联自动驾驶车辆混流跟驰模型[J]. 中国公路学报, 2021, 34(7): 105-117. |
| Zong Fang, Shi Pei-xin, Wang Meng, et al. Connected and automated vehicle mixed-traffic car following model considering the states of multiple front and rear vehicles[J]. China Journal of Highway and Transport, 2021, 34(7): 105-117. | |
| 3 | 秦严严, 杨晓庆, 王昊. 智能网联混合交通流CO2排放影响及改善方法[J]. 吉林大学学报: 工学版,2023, 53(1): 150-158. |
| Qin Yan-yan, Yang Xiao-qing, Wang Hao. Impact of CO2 emissions from connected and automated vehicle mixed traffic flow and improvement method[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(1): 150-158. | |
| 4 | Sun J, Zheng Z D, Sun J. Stability analysis methods and their applicability to car-following models in conventional and connected environments[J]. Transportation Research Part B: Methodological,2018, 109:212-237. |
| 5 | 罗瑞发, 郝慧君, 徐桃让, 等. 考虑智能网联车队强度的混合交通流基本图模型[J]. 吉林大学学报: 工学版, 2023, 53(2): 405-412. |
| Luo Rui-fa, Hao Hui-jun, Xu Tao-rang, et al. Fundamental diagram model of mixed traffic flow of connected and automated vehicles considering vehicles degradations and platooning intensity[J]. Journal of Jilin University (Engineering and Technology Edition),2023, 53(2): 405-412. | |
| 6 | Zhu W X, Zhang H M. Analysis of mixed traffic flow with human-driving and autonomous cars based on car-following model[J]. Physica A: Statistical Mechanics and its Applications, 2018, 496: 274-285. |
| 7 | Yao Z H, Hu R, Wang Y, et al. Stability analysis and the fundamental diagram for mixed connected automated and human-driven vehicles[J]. Physica A: Statistical Mechanics and its Applications, 2019, 533:121931. |
| 8 | Zhai C, Wu W T. Heterogeneous traffic flow modeling with drivers' timid and aggressive characteristics[J]. Chinese Physics B, 2021,30(10): 160-171. |
| 9 | Zhu W X, Zhang L D. A new car-following model for autonomous vehicles flow with mean expected velocity field[J]. Physica A: Statistical Mechanics and its Applications, 2018, 492: 2154-2165. |
| 10 | 纪艺, 史昕, 赵祥模. 基于多前车信息融合的智能网联车辆跟驰模型[J]. 计算机应用, 2019, 39(12):3685-3690. |
| Ji Yi, Shi Xin, Zhao Xiang-mo. Car-following model for intelligent connected vehicles based on multiple headway information fusion[J]. Journal of Computer Applications, 2019, 39(12): 3685-3690. | |
| 11 | 安树科, 徐良杰, 钱良辉, 等. 考虑前方多车优化速度信息的车辆跟驰模型[J]. 东南大学学报: 自然科学版, 2020, 50(6): 1156-1162. |
| An Shu-ke, Xu Liang-jie, Qian Liang-hui, et al. Car-following model with optimal velocity information of multiple-vehicle ahead[J]. Journal of Southeast University (Natural Science Edition), 2020, 50(6): 1156-1162. | |
| 12 | Li T L, Ngoduy D, Hui F, et al. A car-following model to assess the impact of V2V messages on traffic dynamics[J]. Transportmetrica B: Transport Dynamics, 2020, 8(1): 150-165. |
| 13 | Yi Z W, Lu W Q, Xu L H, et al. Intelligent back-looking distance driver model and stability analysis for connected and automated vehicles[J]. Journal of Central South University, 2020, 27(11): 3499-3512. |
| 14 | Treiber M, Hennecke A, Helbing D. Congested traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62(2):1805-1824. |
| 15 | Minderhoud M M, Bovy P H L. Extended time-to-collision measures for road traffic safety assessment[J]. Accident Analysis & Prevention,2001, 33(1):89-97. |
| 16 | 吴兵, 王文璇, 李林波, 等. 多前车影响的智能网联车辆纵向控制模型[J]. 交通运输工程学报, 2020,20(2): 184-194. |
| Wu Bing, Wang Wen-xuan, Li Lin-bo, et al. Longitudinal control model for connected autonomous vehicles influenced by multiple preceding vehicles[J]. Journal of Traffic and Transportation Engineering,2020, 20(2): 184-194. |
| [1] | 曹倩,李志慧,陶鹏飞,李海涛,马永建. 面向交通事故检测及预防的异质传感器布设方法[J]. 吉林大学学报(工学版), 2024, 54(4): 969-978. |
| [2] | 张鑫,胡启洲,何君,吴啸宇. 考虑交通梗塞的合流区交通状况诊断[J]. 吉林大学学报(工学版), 2024, 54(2): 478-484. |
| [3] | 张卫华,刘嘉茗,解立鹏,丁恒. 网联混合环境快速路交织区自动驾驶车辆换道模型[J]. 吉林大学学报(工学版), 2024, 54(2): 469-477. |
| [4] | 岳昊,张琦悦,杨子玉,任孟杰,张旭. 拥堵空间排队的静态交通流分配迭代加权算法[J]. 吉林大学学报(工学版), 2024, 54(1): 136-145. |
| [5] | 杜筱婧,姚荣涵. 智能网联公交车出站强制换道的演化博弈机制[J]. 吉林大学学报(工学版), 2024, 54(1): 124-135. |
| [6] | 马壮林,崔姗姗,胡大伟,王晋. 限行政策下传统小汽车出行者出行方式选择[J]. 吉林大学学报(工学版), 2023, 53(7): 1981-1993. |
| [7] | 张雅丽,付锐,袁伟,郭应时. 考虑能耗的进出站驾驶风格分类及识别模型[J]. 吉林大学学报(工学版), 2023, 53(7): 2029-2042. |
| [8] | 尹超英,陆颖,邵春福,马健霄,许得杰. 考虑空间自相关的建成环境对通勤方式选择的影响[J]. 吉林大学学报(工学版), 2023, 53(7): 1994-2000. |
| [9] | 潘恒彦,王永岗,李德林,陈俊先,宋杰,杨钰泉. 基于交通冲突的长纵坡路段追尾风险评估及预测[J]. 吉林大学学报(工学版), 2023, 53(5): 1355-1363. |
| [10] | 宋灿灿,荆迪菲,谢俊峰,康可心. 设置广告牌的高速公路平曲线路段驾驶行为分析[J]. 吉林大学学报(工学版), 2023, 53(5): 1345-1354. |
| [11] | 罗瑞发,郝慧君,徐桃让,顾秋凡. 考虑智能网联车队强度的混合交通流基本图模型[J]. 吉林大学学报(工学版), 2023, 53(2): 405-412. |
| [12] | 卢凯,徐广辉,叶志宏,林永杰. 考虑清空时间的双向队首绿波协调控制数解算法[J]. 吉林大学学报(工学版), 2023, 53(2): 421-429. |
| [13] | 曹倩,李志慧,陶鹏飞,马永建,杨晨曦. 考虑风险异质特性的路网交通事故风险评估方法[J]. 吉林大学学报(工学版), 2023, 53(10): 2817-2825. |
| [14] | 秦严严,杨晓庆,王昊. 智能网联混合交通流CO2排放影响及改善方法[J]. 吉林大学学报(工学版), 2023, 53(1): 150-158. |
| [15] | 张鑫,张卫华. 快速路合流区主线不同交通状态下的安全性分析[J]. 吉林大学学报(工学版), 2022, 52(6): 1308-1314. |
|
||