吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (9): 2676-2686.doi: 10.13229/j.cnki.jdxbgxb.20221452
• 通信与控制工程 • 上一篇
面向不同驾驶行为模型的共享控制器设计
田彦涛( ),庾文彦,季言实,谢波
),庾文彦,季言实,谢波
- 吉林大学 通信工程学院,长春 130022
Shared controller design for different driving behavior models
Yan-tao TIAN(),Wen-yan YU,Yan-shi JI,bo XIE
- College of Communication Engineering,Jilin University,Changchun 130022 China
摘要:
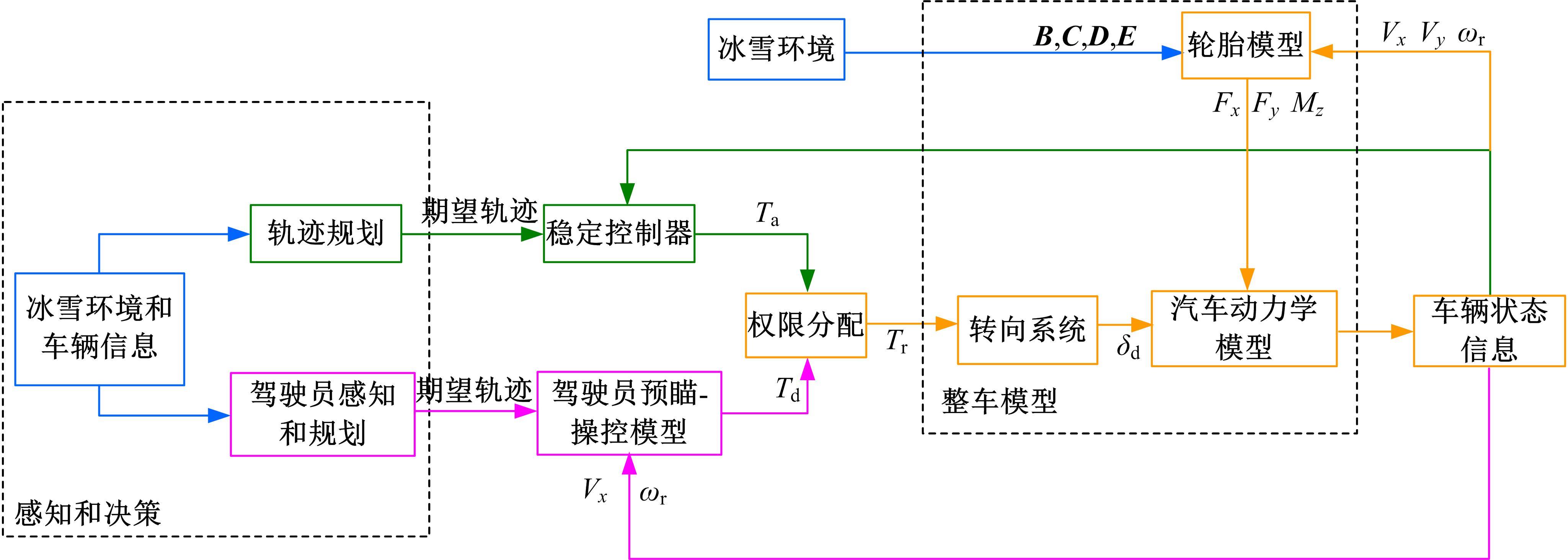
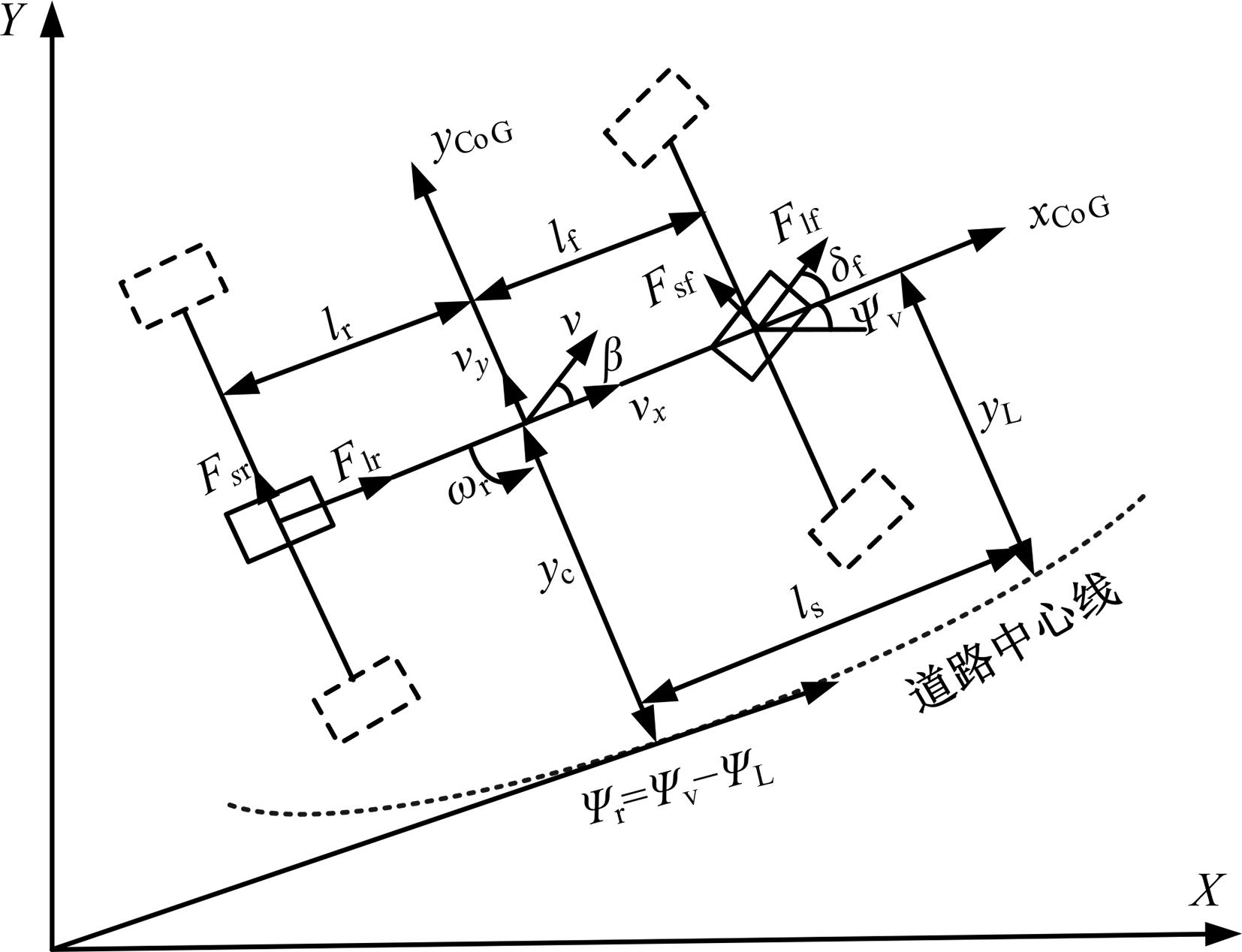
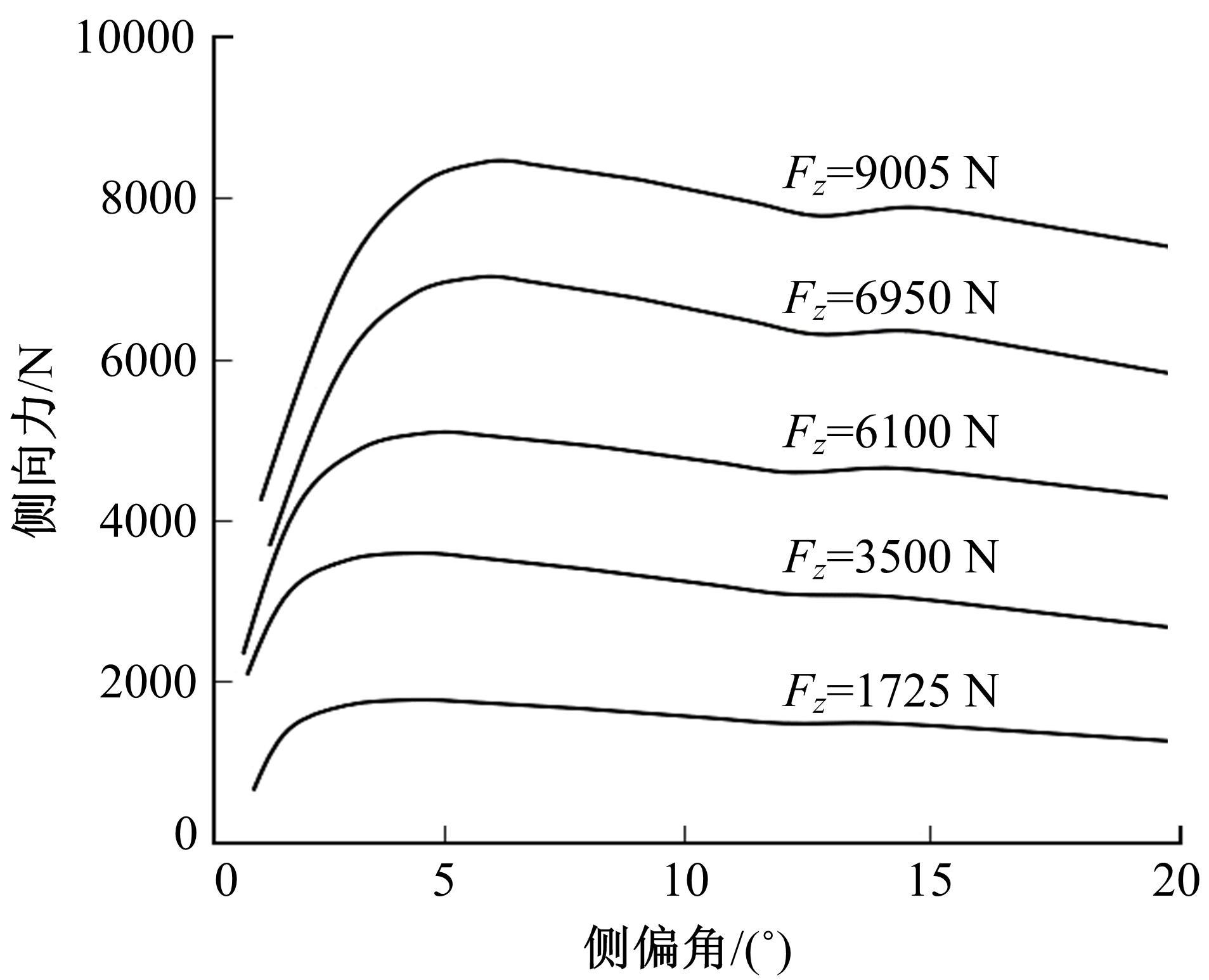
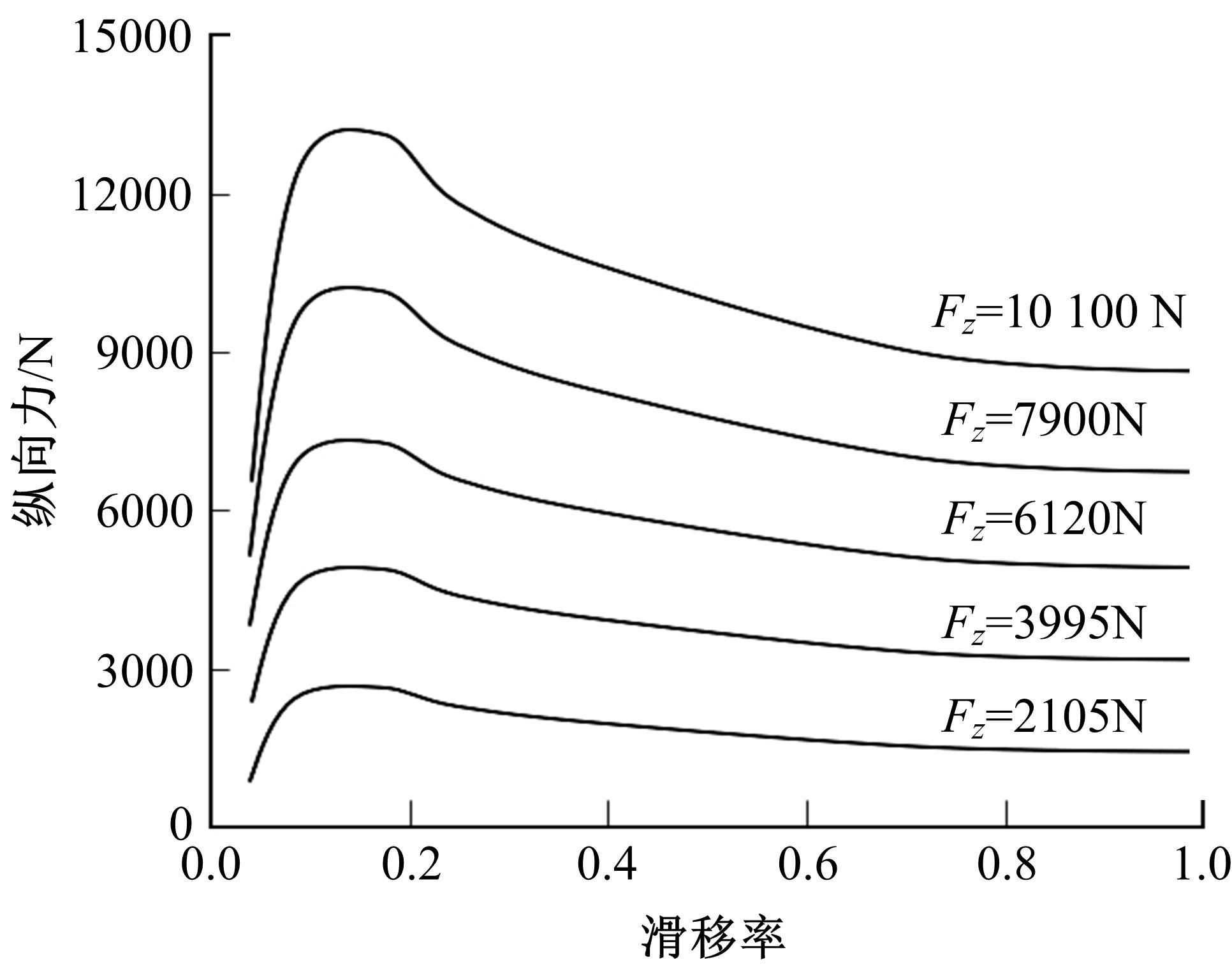
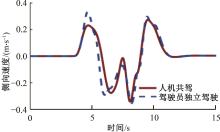
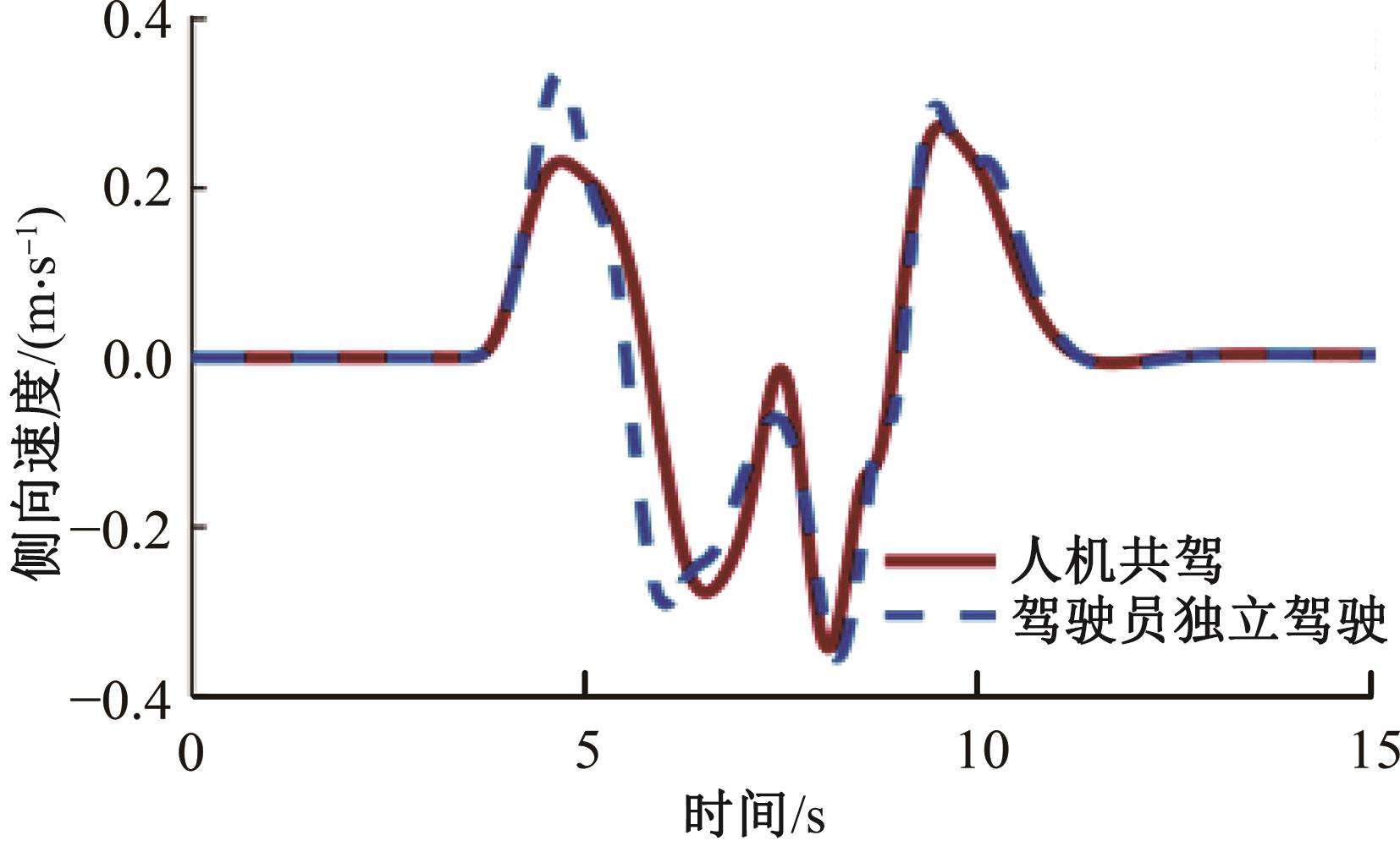
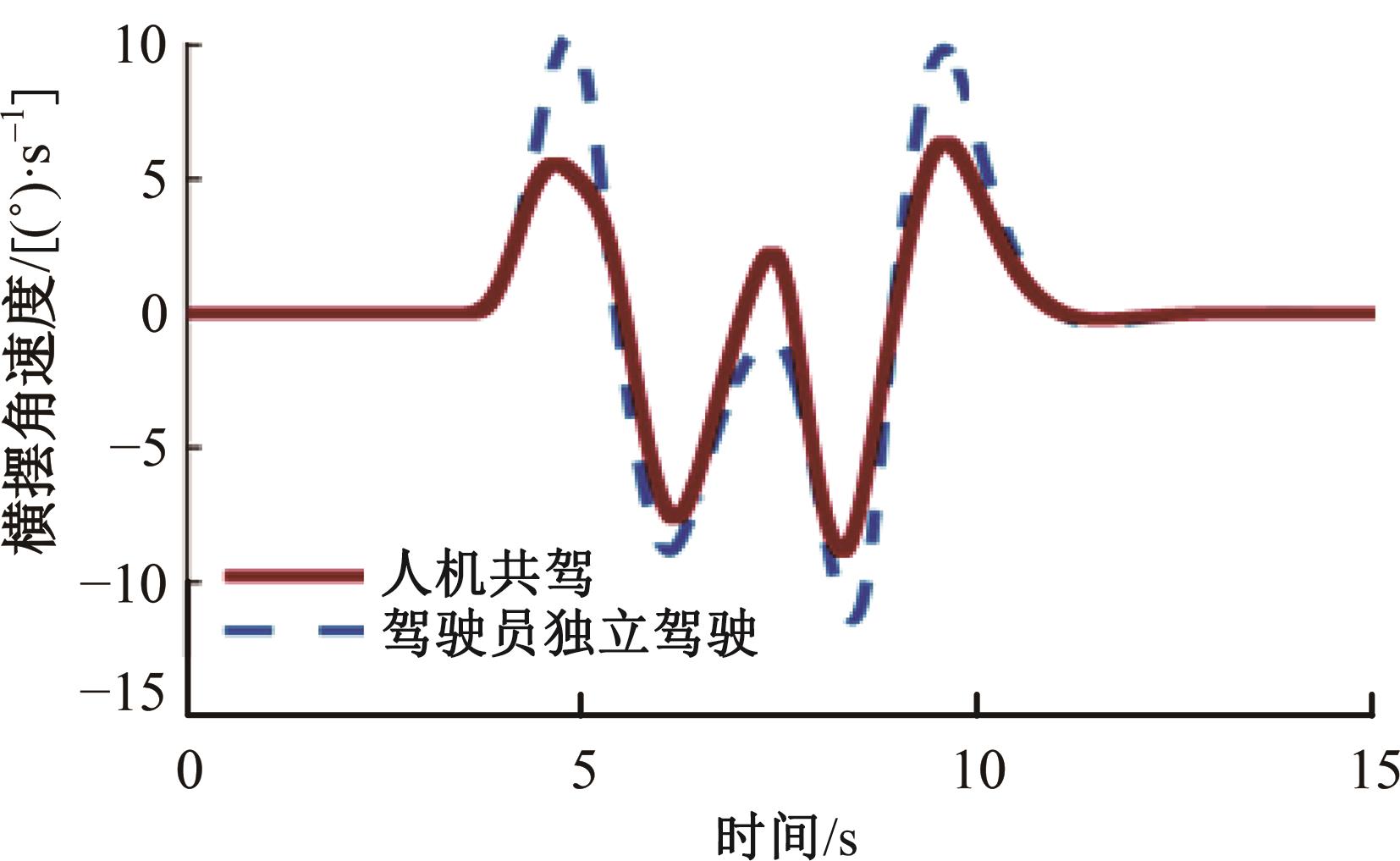
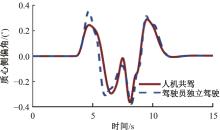
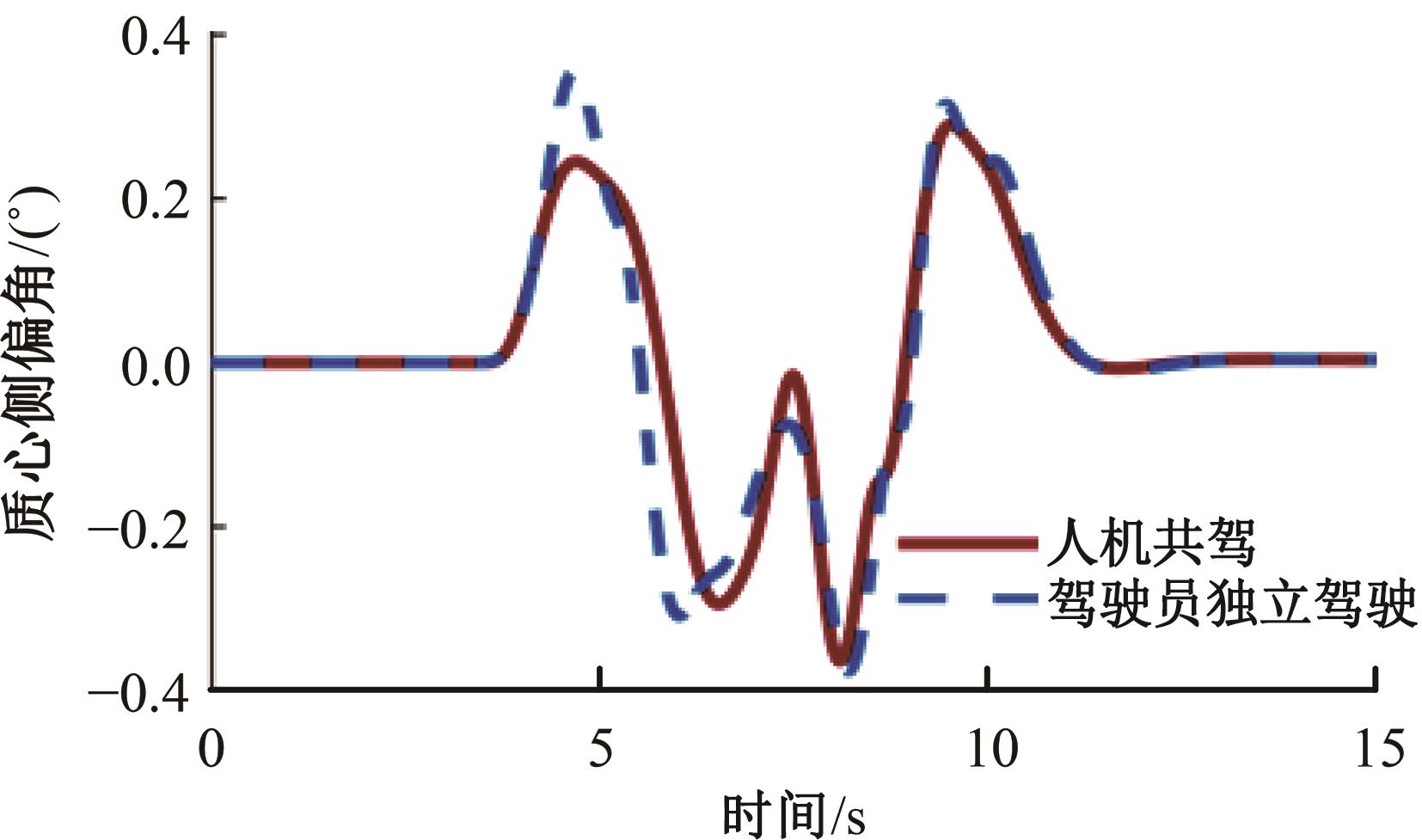
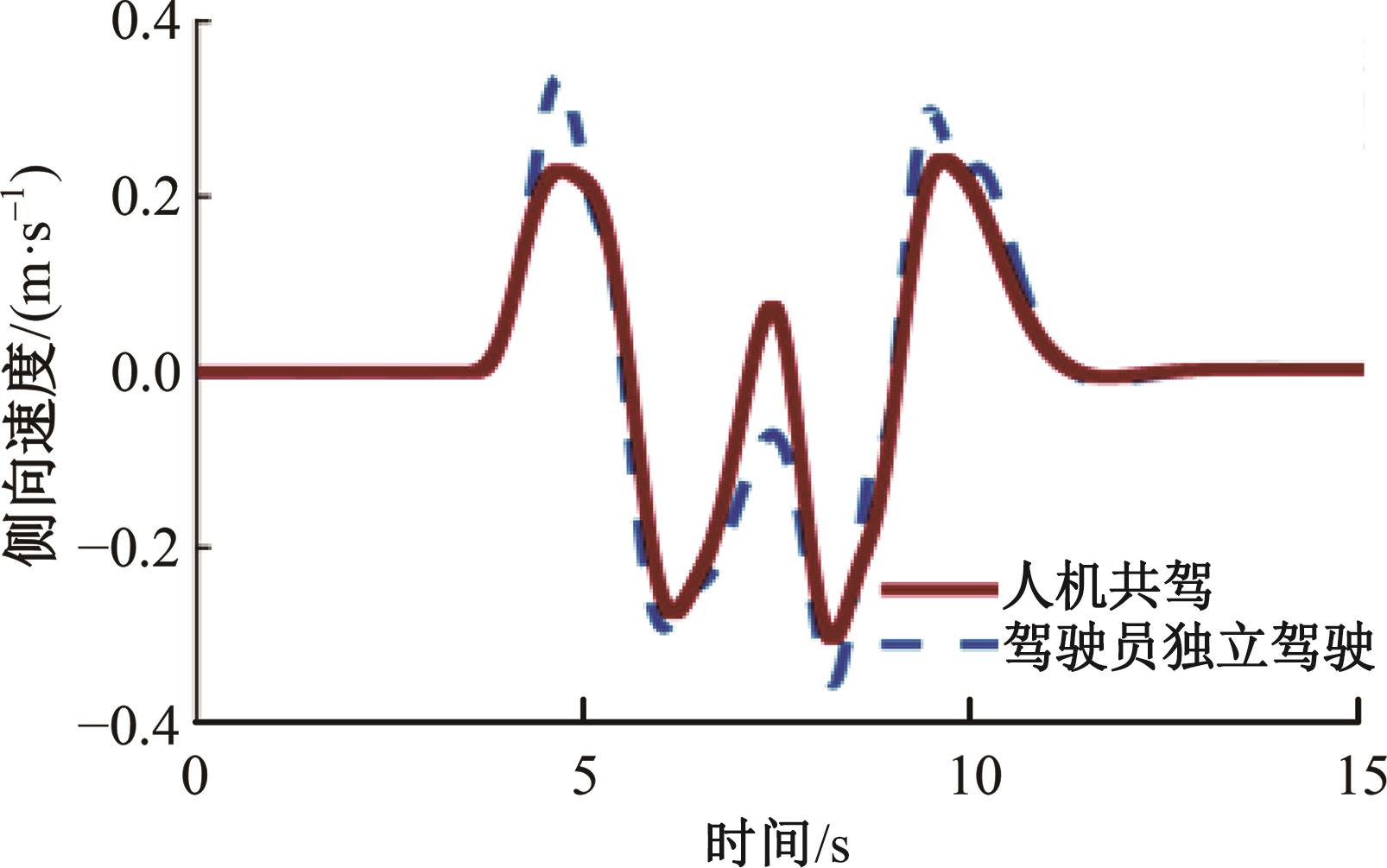
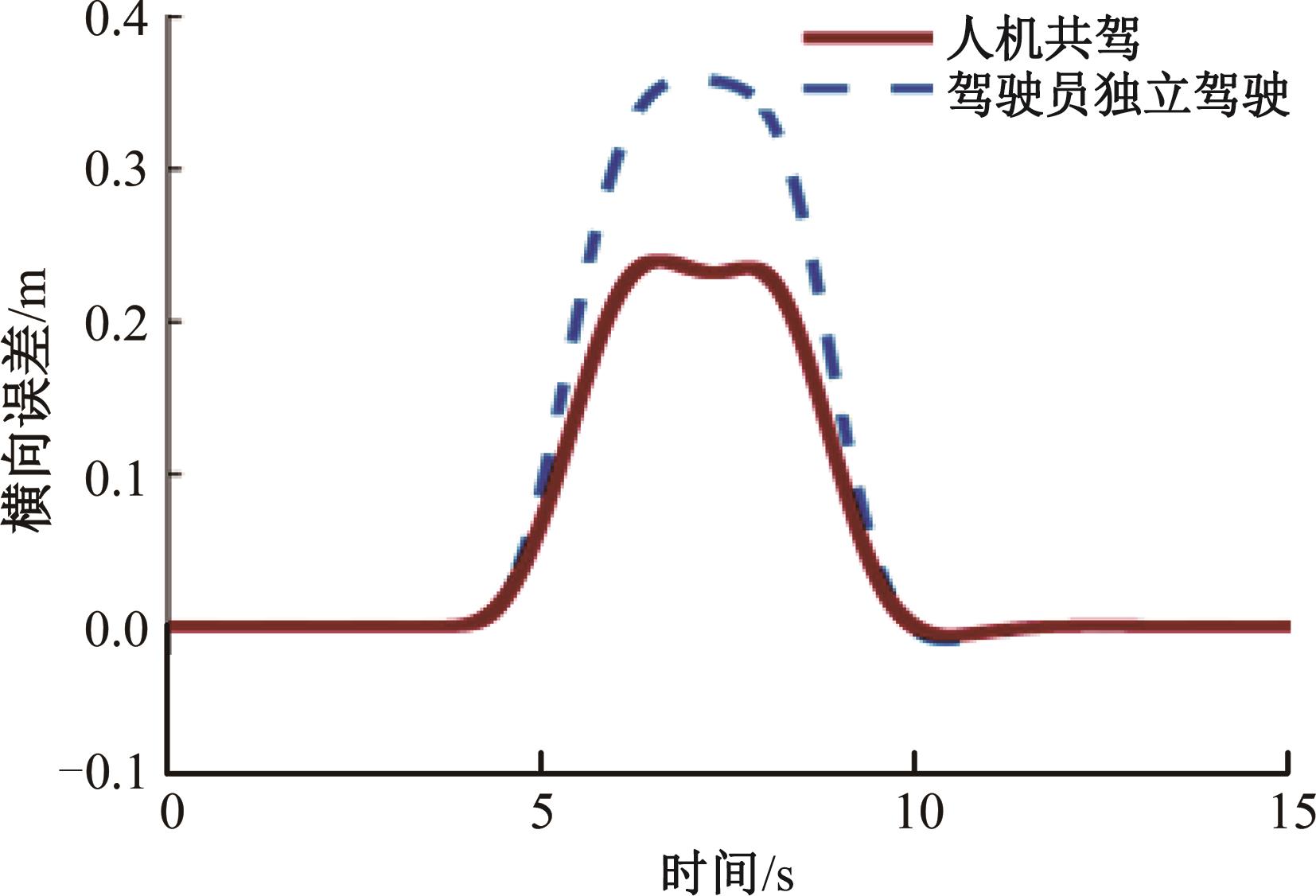
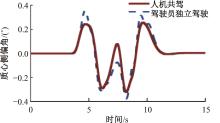
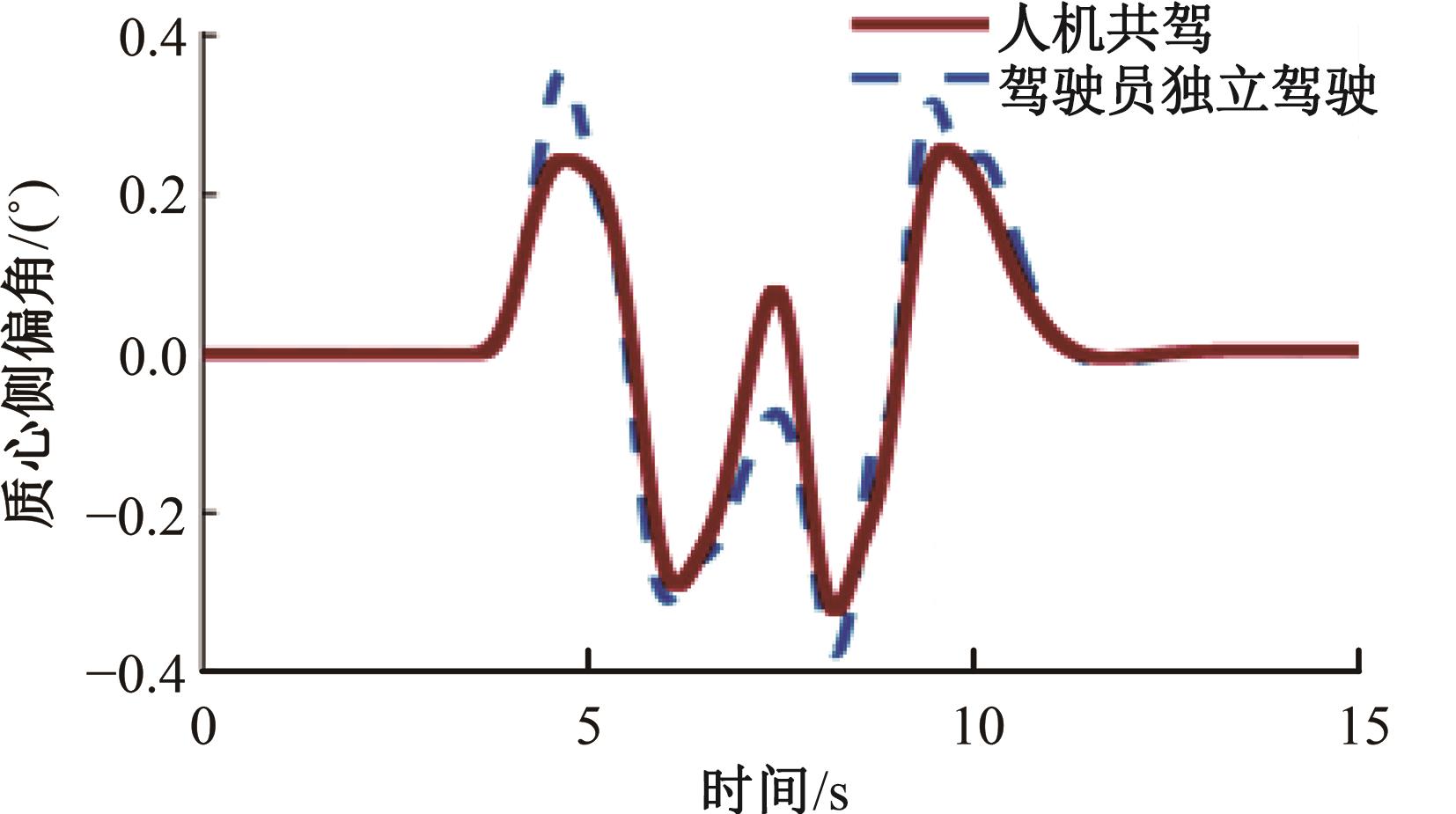
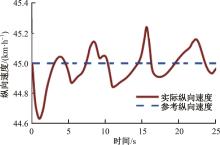
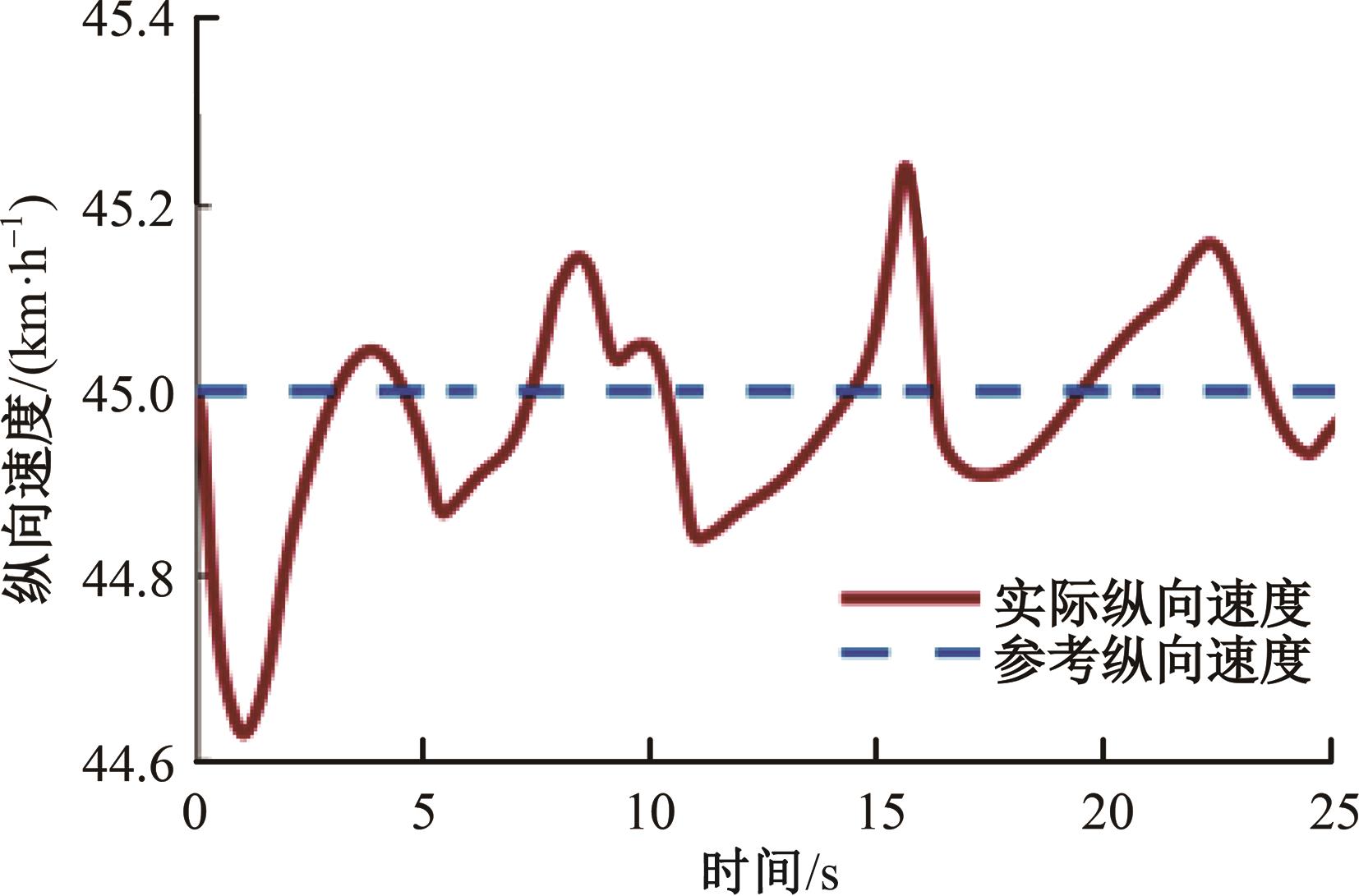
针对驾驶员在驾驶车辆时存在差异性的问题,确保不同驾驶员驾驶车辆时均能保证整个系统的闭环稳定性,同时使车辆轨迹跟踪误差最小化,设计了H∞ 鲁棒控制器。建立了能够描述不同驾驶员行为的预瞄-操控模型,并将汽车动力学模型与轮胎模型结合在一起设计了整体系统模型,同时在人机共享控制双环结构的基础上设计了H∞ 鲁棒控制器。最后,在Simulink/CarSim联合仿真平台上验证了本文控制器能够改善汽车的跟踪性能和系统稳定性。
中图分类号:
- TP273








| 1 | Soualmi B, Sentouh C, Popieul J C, et al. Fuzzy Takagi-Sugeno LQ controller for a shared control of vehicle[C]∥2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, USA,2011: 965-961. |
| 2 | Saito T, Wada T, Sonoda K. Control authority transfer method for automated to manual driving via shared authority mode[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(2): 198-207. |
| 3 | Wada T, Sonoda K, Okasaka T, et al. Authority transfer method from automated to manual driving via haptic shared control[C]∥2016 IEEE International Conference on Systems, Man, and Cybernetics(SMC), Budapest,Hungary, 2016: 2659-2664. |
| 4 | Nguyen A T, Sentouh C, Popieul J C. Driver-automation cooperative approach for shared steering control under multiple system constraints: design and experiments[J]. IEEE Transactions on Industrial Electronics, 2017, 64(5): 3819-3830. |
| 5 | Tian Y, Zhao Y, Shi Y, et al. The indirect shared steering control under double loop structure of driver and automation[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1403-1416. |
| 6 | Li Z J, Zhao S N, Duan J D,et al. Human Co-operative wheelchair with brain-machine interaction based on shared control strategy[J]. IEEE/ASME Transactions on Mechatronics: A Joint Publication of the IEEE Industrial Electronics Society and the ASME Dynamic Systems and Control Division, 2017, 22(1): 185-195. |
| 7 | Xing Y, Huang C, Lyu C. Driver automation collaboration for automated vehicles: a review of human-centered shared control[C]∥2020 IEEE Intelligent Vehicles Symposium, Las Vegas, USA, 2020: 1964-1971. |
| 8 | Wang W S, Na X X, Cao D P,et al.Decision-making in driver-automation shared control: a review and perspectives[J].IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1289-1307. |
| 9 | Ren X S. Rethinking the relationship between humans and computers[J]. Computer, 2016, 49(8): 104-108. |
| 10 | Petermeijer S M, Abbink D A, de Winter J C F. Should drivers be operating within an automation-free bandwidth? Evaluating haptic steering support systems with different levels of authority[J].Human Factors, 2015, 57(1): 5-20. |
| 11 | 杨建森, 郭孔辉, 丁海涛, 等. 基于模型预测控制的汽车底盘集成控制[J]. 吉林大学学报: 工学版, 2011, 41(): 1-5. |
| Yang Jian-sen, Guo Kong-hui, Ding Hai-tao,et al. Integrated control of automobile chassis based on model predictive control[J]. Journal of Jilin University (Engineering and Technology Edition),2011,41(Sup.2): 1-5. | |
| 12 | 顾万里, 王萍,胡云峰, 等. 具有H∞性能的轮式移动机器人非线性控制器设计[J]. 吉林大学学报:工学版, 2018, 48(6): 1811-1819. |
| Gu Wan-li, Wang Ping, Hu Yun-feng,et al. Nonlinear controller design for wheeled mobile robot with H∞ performance[J]. Journal of Jilin University (Engineering and Technology Edition),2018,48(6):1811-1819. | |
| 13 | Lio M, Biral F, Bertolazzi E, et al. Artificial Co-drivers as a universal enabling technology for future intelligent vehicles and transportation systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 244-263. |
| 14 | 李静,张家旭. 基于状态反馈的车辆底盘集成H∞鲁棒控制[J]. 吉林大学学报: 工学版,2016,46(3): 685-691. |
| Li Jing, Zhang Jia-xu. Integrated H∞ robust control for vehicle chassis based on state feedback[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(3): 685-691. | |
| 15 | Saleh L, Chevrel P, Claveau F, et al. Shared steering control between a driver and an automation: stability in the presence of driver behavior uncertainty[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2): 974-983. |
| 16 | 庞辉, 王延, 刘凡. 考虑参数不确定性的主动悬架H2/H∞性能控制 [J].控制与决策, 2019, 34(3): 470-478. |
| Pang Hui, Wang Yan, Liu Fan. H2/H∞ performance control of active suspension considering parameter uncertainty[J]. Control and Decision, 2019, 34(3): 470-478. | |
| 17 | 王菁. 线控四轮转向汽车的鲁棒控制研究[D].长春:吉林大学通信工程学院, 2016. |
| Wang Jing. Study on robust control of a vehicle with wire controlled four wheel steering[D].Changchun: College of Communication Engineering, Jilin University, 2016. | |
| 18 | Chouki S, Anh-tu N, Amir B M, et al. Driver-automation cooperation oriented approach for shared control of lane keeping assist systems[J]. IEEE Transactions on Control Systems Technology, 2019, 27(5): 1962-1978. |
| [1] | 李文航,倪涛,赵丁选,邓英杰,师小波. 基于模型预测反馈技术的救援车辆液压悬挂系统控制方法[J]. 吉林大学学报(工学版), 2024, 54(3): 610-619. |
| [2] | 赵靖华,张雨彤,曹派,王忠恕,李小平,孙亚南,解方喜. 压缩天然气发动机增程式电动汽车能量管理优化[J]. 吉林大学学报(工学版), 2024, 54(3): 600-609. |
| [3] | 赵靖华,杜世豪,刘靓葳,胡云峰,孙耀,解方喜. 基于改进混沌优化的选择性催化还原系统参数辨识方法[J]. 吉林大学学报(工学版), 2024, 54(2): 550-557. |
| [4] | 王守瑞,靳伍银,芮执元,张霞. 基于快速非奇异终端滑模的三维天车负载摆动控制[J]. 吉林大学学报(工学版), 2023, 53(12): 3508-3517. |
| [5] | 孙耀,胡云峰,周杰敏,程欢,曲婷,赵靖华,陈虹. 基于分层控制器的SCR系统滚动时域优化控制方法[J]. 吉林大学学报(工学版), 2023, 53(1): 61-71. |
| [6] | 高金武,贾志桓,王向阳,邢浩. 基于PSO-LSTM的质子交换膜燃料电池退化趋势预测[J]. 吉林大学学报(工学版), 2022, 52(9): 2192-2202. |
| [7] | 高金武,王义琳,刘华洋,王艺达. 基于滑模观测器的质子交换膜燃料电池阴极进气系统解耦控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2156-2167. |
| [8] | 李昂,杨泓渊,雷小萌,宋凯文,千承辉. 基于等效连杆模型的六足机器人行进姿态闭环控制[J]. 吉林大学学报(工学版), 2022, 52(7): 1696-1708. |
| [9] | 朱航,于瀚博,梁佳辉,李宏泽. 基于电场模型的无人机搜寻改进算法及仿真分析[J]. 吉林大学学报(工学版), 2022, 52(12): 3029-3038. |
| [10] | 鲜斌,张诗婧,韩晓薇,蔡佳明,王岭. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报(工学版), 2021, 51(6): 2259-2267. |
| [11] | 许芳,张君明,胡云峰,曲婷,曲逸,刘奇芳. 智能车辆路径跟踪横纵向耦合实时预测控制器[J]. 吉林大学学报(工学版), 2021, 51(6): 2287-2294. |
| [12] | 韩光信,赵聚乐,胡云峰. 控制输入受限的板球系统滚动线性二次型调节器控制[J]. 吉林大学学报(工学版), 2021, 51(6): 1982-1989. |
| [13] | 于树友,常欢,孟凌宇,郭洋,曲婷. 基于扰动观测器的轮式移动机器人滚动时域路径跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1097-1105. |
| [14] | 吴爱国,韩俊庆,董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1905-1912. |
| [15] | 王伟,赵健廷,胡宽荣,郭永仓. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报(工学版), 2020, 50(2): 464-471. |
|
||