吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (6): 2287-2294.doi: 10.13229/j.cnki.jdxbgxb20210470
• 通信与控制工程 • 上一篇
智能车辆路径跟踪横纵向耦合实时预测控制器
许芳1,2( ),张君明2,胡云峰2,曲婷1,曲逸2,刘奇芳2()
),张君明2,胡云峰2,曲婷1,曲逸2,刘奇芳2()
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.吉林大学 通信工程学院,长春 130022
Lateral and longitudinal coupling real⁃time predictive controller for intelligent vehicle path tracking
Fang XU1,2(),Jun-ming ZHANG2,Yun-feng HU2,Ting QU1,Yi QU2,Qi-fang LIU2()
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
摘要:
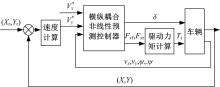
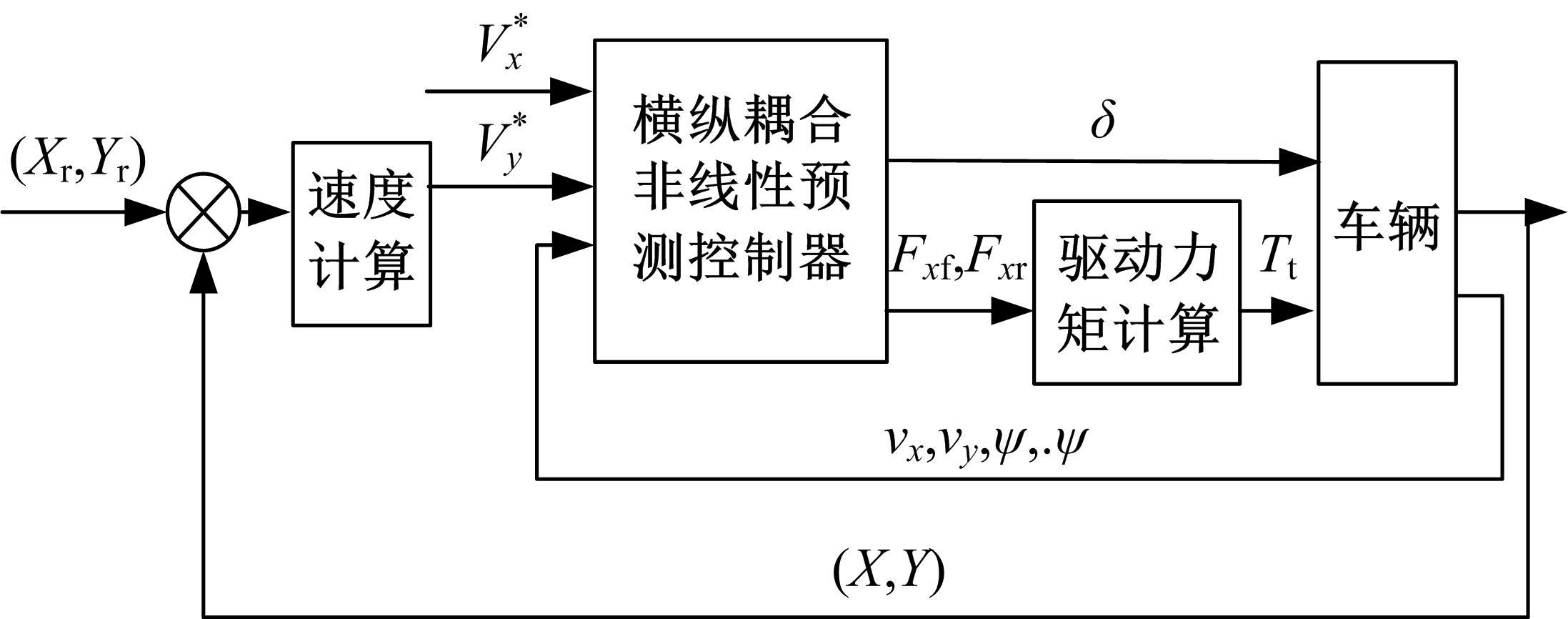
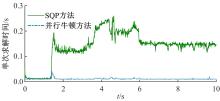
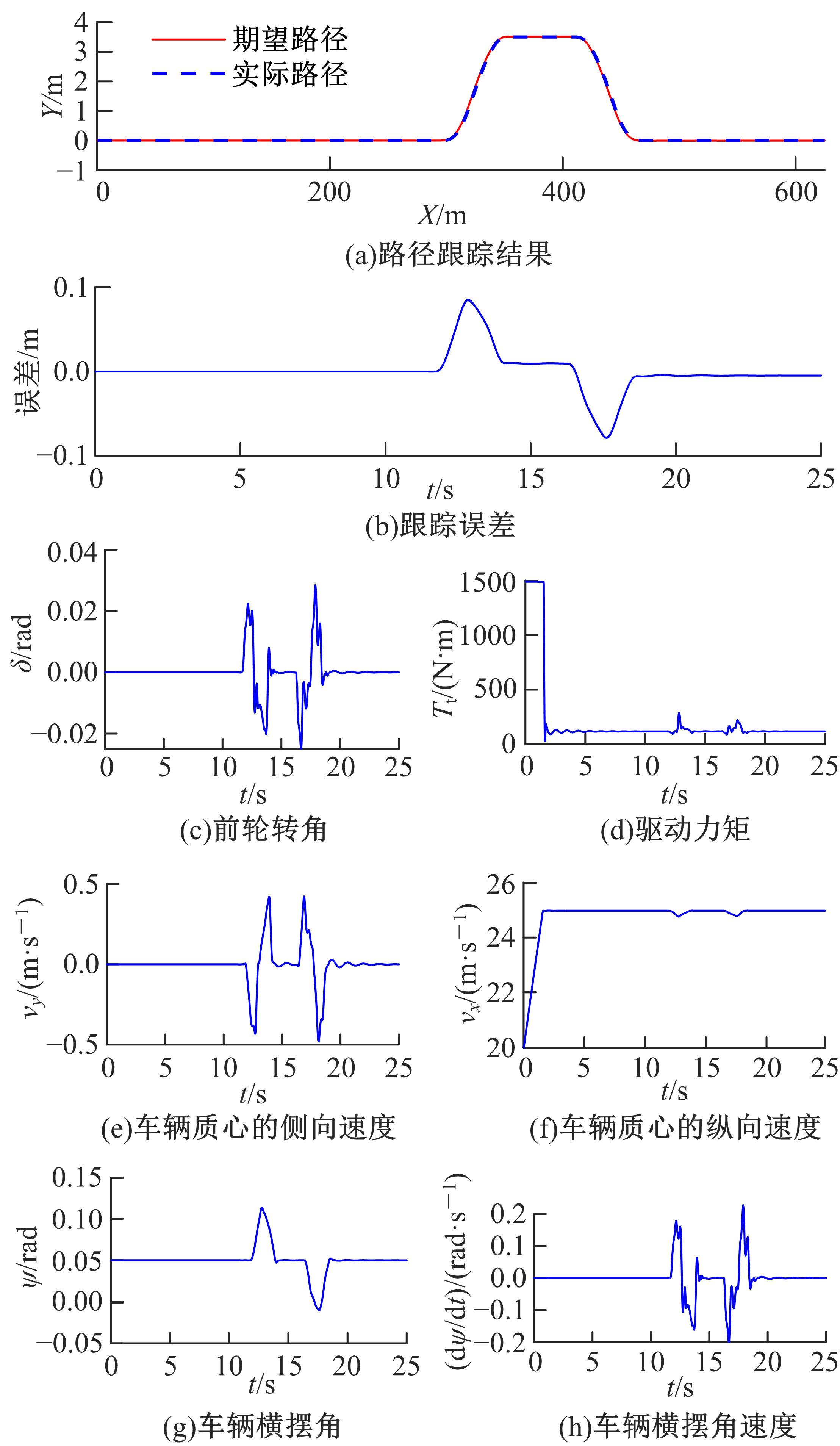
为解决高速工况下低附着系数路面上智能车辆路径稳定跟踪控制问题,提出了基于非线性模型预测控制的车辆路径跟踪横纵向耦合集成控制器,并实现了实时控制。首先,根据期望的路径信息计算出期望的车辆横向速度。然后,将实际横、纵向车辆速度与期望速度的误差设为目标函数,同时考虑执行机构约束,设计了非线性模型预测控制器,优化求解出前轮转角和前、后轮驱动力,实现了车辆路径稳定跟踪控制。为了提高控制器的实时性,将非线性规划问题转换成代数方程组求解,采用并行牛顿方法进行方程组求解,通过解耦预测时域间方程组的耦合关系,降低优化问题的计算复杂度。最后,在双移线工况下进行控制器的仿真实验和硬件在环实验,实验结果验证了本文所设计控制器的有效性,可实现车辆路径跟踪的实时控制。
中图分类号:
- TP273






| 1 | 陈虹,郭露露,宫洵, 等. 智能时代的汽车控制[J]. 自动化学报, 2020, 46(7):1313-1332. |
| Chen Hong, Guo Lu-lu, Gong Xun, et al. Automotive control in intelligent era[J]. Acta Automatica Sinica, 2020, 46(7):1313-1332. | |
| 2 | 张栩源,李军,化祖旭. 自动驾驶汽车路径跟踪控制[J]. 汽车工程师, 2021(1): 14-17. |
| Zhang Xu-yuan, Li Jun, Hua Zu-xu. Path tracking control for autonomous vehicle[J]. Automotive Engineer, 2021(1): 14-17. | |
| 3 | 陈威,廖文浩,刘明春. 基于MPC 的自动驾驶车辆横向路径跟踪控制[J]. 南昌大学学报:工科版,2020,42(3):279-288. |
| Chen Wei, Liao Wen-hao, Liu Ming-chun. Lateral path tracking control of self-driving vehicle based on MPC[J]. Journal of Nanchang University (Engineering&Technology Edition), 2020, 42(3): 279-288. | |
| 4 | 吴施鹏,刘冉冉,颜海彬,等. 基于模型预测的无人车路径跟踪优化控制[J]. 重庆理工大学学报:自然科学, 2020, 34(12): 36-44. |
| Wu Shi-peng, Liu Ran-ran, Yan Hai-bin, et al. Optimal control of unmanned vehicle path tracking based on model prediction[J]. Journal of Chongqing University of Technology(Natural Science), 2020, 34(12): 36-44. | |
| 5 | 吴飞龙,郭世永. 基于非线性模型预测控制的智能车路径跟踪算法[J]. 汽车技术, 2020(5):1-7. |
| Wu Fei-long, Guo Shi-yong. Intelligent vehicle path tracking algorithm based on nonlinear model predictive control[J]. Automobile Technology, 2020(5):1-7. | |
| 6 | Gutjahr B, Groll L, Werling M. Lateral vehicle trajectory optimization using constrained linear time-varying MPC[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(6): 1586-1595. |
| 7 | Ji J, Khajepour A, Melek W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2):952-964. |
| 8 | Kai Cao, Han Shi-xia, Gao Song, et al. Sliding mode algorithm based on linearization feedback for vehicle's speed control[C]∥Proceedings of the 36th Chinese Control Conference, Dalian, China, 2017:9355-9359. |
| 9 | Xiong Lu, Fu Zhi-qiang, Bai Man-fei, et al. A vehicle speed adaptive control method considering acceleration demand[J]. Journal of Xi'an Jiao tong University, 2019, 53(1):62-69. |
| 10 | Chen Sun-ping, Xiong Guang-ming, Chen Hui-yan, et al. MPC-based path tracking with PID speed control for high-speed autonomous vehicles considering time-optimal travel[J]. Journal of Central South University, 2020, 27(12):3702-3720. |
| 11 | 史鸿枫,刘明春,黄菊花. 智能电动车辆横纵向协同运动控制[J]. 南昌大学学报:工科版,2021,43(1):62-72. |
| Shi Hong-feng, Liu Ming-chun, Huang Ju-hua. Lateral and longitudinal motion cooperative control of intelligent electric vehicle[J]. Journal of Nanchang University(Engineering&Technology Edition),2021,43(1):62-72. | |
| 12 | 吴昊,王思山,周海鹰,等. 基于模型预测控制的智能车横纵向控制器设计[J]. 湖北汽车工业学院学报, 2021, 35(1):11-16, 20. |
| Wu Hao, Wang Si-shan, Zhou Hai-ying, et al. Design of lateral and longitudinal controller of intelligent vehicle based on model predictive control[J]. Journal of Hubei University of Automotive Technology, 2021, 35(1): 11-16, 20. | |
| 13 | Xie Hui, Liu Shuang-shuang. Lateral and longitudinal motion control of unmanned vehicles using model predictive control[J].Journal of Automotive Safety and Energy, 2019,10(3):326-333. |
| 14 | Yao Qiang-qiang, Tian Yian, Wang Qun, et al. Control strategies on path tracking for autonomous vehicle: state of the art and future challenges[J]. IEEE Access, 2020(8): 161211-161222. |
| 15 | 付翔,杨凤举,黄斌,等. 主动后轮转向四轮独立驱动车辆的协调控制[J]. 江苏大学学报:自然科学版,2021,42(5):497-505. |
| Fu Xiang,Yang Feng-ju,Huang Bin,et al. Coordinated control of active rear wheel steering and four wheel independent driving vehicle[J]. Journal of Jiangsu University(Natural Science Edition),2021,42(5):497-505. | |
| 16 | 徐梅,陈淮莉. 交通拥堵情况下的多温共配车辆路径优化[J]. 江苏大学学报:自然科学版,2019,40(2):152-158. |
| Xu Mei,Chen Huai-li. Optimization of multi-temperature co-distribution vehicle path based on congestion situation[J]. Journal of Jiangsu University(Natural Science Edition),2019,40(2):152-158. | |
| 17 | 张金成,王陶,王良模,等. 纯电动汽车坡道行驶驱动转矩优化控制策略[J]. 江苏大学学报:自然科学版, 2021, 42(5):506-512. |
| Zhang Jin-cheng, Wang Tao, Wang Liang-mo, et al. Optimization control strategy of driving torque for slope-crossing of pure electric vehicles[J]. Journal of Jiangsu University(Natural Science Edition, 2021, 42(5): 506-512. | |
| 18 | 丛岩峰. 高速公路环境中自主驾驶车辆运动规划与控制[D]. 长春:吉林大学通信工程学院,2011. |
| Cong Yan-feng. Motion planning and control of autonomous vehicles in highway environment[D]. Changchun: College of Communication Engineering, Jilin University, 2011. | |
| 19 | Wang Yu-lei, Ding Hai-tao, Yuan Jing-xin, et al. Output-feedback triple-step coordinated control for path following of autonomous ground vehicles[J]. Mechanical Systems and Signal Processing,2019,116:146-159. |
| 20 | Deng H, Ohtsuka T. A parallel Newton-type method for nonlinear model predictive control[J]. Automatica, 2019,109:No.108560. |
| 21 | Nocedal J, Wright S J. Numerical Optimization[M]. New York, America:Springer, 2006. |
| [1] | 鲜斌,张诗婧,韩晓薇,蔡佳明,王岭. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报(工学版), 2021, 51(6): 2259-2267. |
| [2] | 韩光信,赵聚乐,胡云峰. 控制输入受限的板球系统滚动线性二次型调节器控制[J]. 吉林大学学报(工学版), 2021, 51(6): 1982-1989. |
| [3] | 于树友,常欢,孟凌宇,郭洋,曲婷. 基于扰动观测器的轮式移动机器人滚动时域路径跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1097-1105. |
| [4] | 吴爱国,韩俊庆,董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1905-1912. |
| [5] | 王伟,赵健廷,胡宽荣,郭永仓. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报(工学版), 2020, 50(2): 464-471. |
| [6] | 刘富,安毅,董博,李元春. 基于ADP的可重构机械臂能耗保代价分散最优控制[J]. 吉林大学学报(工学版), 2020, 50(1): 342-350. |
| [7] | 曲兴田,王学旭,孙慧超,张昆,闫龙威,王宏一. 熔融沉积成型技术3D打印机加热系统的模糊自适应PID控制[J]. 吉林大学学报(工学版), 2020, 50(1): 77-83. |
| [8] | 马常友, 高海波, 丁亮, 于海涛, 邢宏军, 邓宗全. 机器人末端执行器自更换机构设计及对接策略[J]. 吉林大学学报(工学版), 2019, 49(6): 2027-2037. |
| [9] | 马苗苗,潘军军,刘向杰. 含电动汽车的微电网模型预测负荷频率控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1644-1652. |
| [10] | 于树友,谭雷,王伍洋,陈虹. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报(工学版), 2019, 49(3): 934-942. |
| [11] | 温海营,任翔,徐卫良,丛明,秦文龙,胡书海. 咀嚼机器人颞下颌关节仿生设计及试验测试[J]. 吉林大学学报(工学版), 2019, 49(3): 943-952. |
| [12] | 顾万里,王萍,胡云峰,蔡硕,陈虹. 具有H∞性能的轮式移动机器人非线性控制器设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1811-1819. |
| [13] | 李战东,陶建国,罗阳,孙浩,丁亮,邓宗全. 核电水池推力附着机器人系统设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1820-1826. |
| [14] | 赵爽,沈继红,张刘,赵晗,陈柯帆. 微细电火花加工表面粗糙度快速高斯评定[J]. 吉林大学学报(工学版), 2018, 48(6): 1838-1843. |
| [15] | 王德军, 魏薇郦, 鲍亚新. 考虑侧风干扰的电子稳定控制系统执行器故障诊断[J]. 吉林大学学报(工学版), 2018, 48(5): 1548-1555. |
|
||