Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (5): 1682-1691.doi: 10.13229/j.cnki.jdxbgxb.20230820
Previous Articles Next Articles
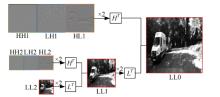
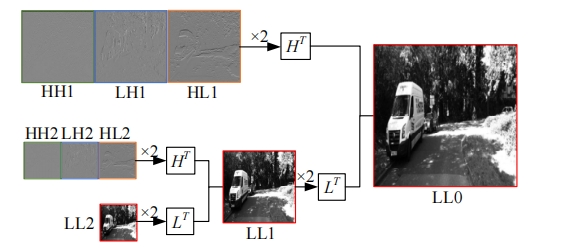
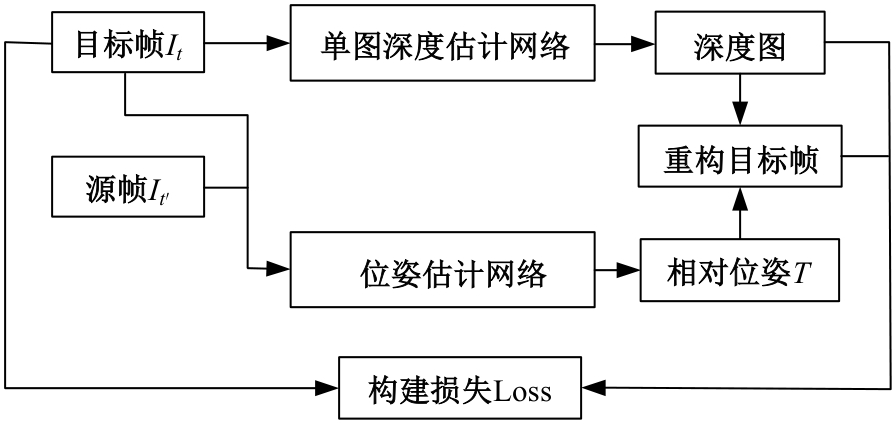
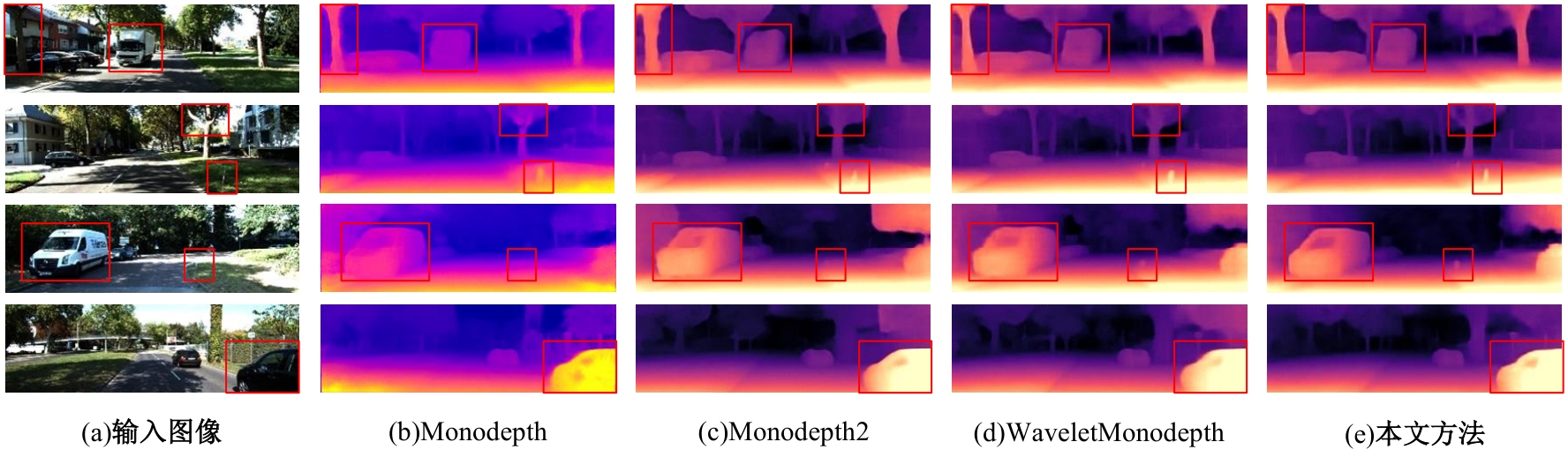
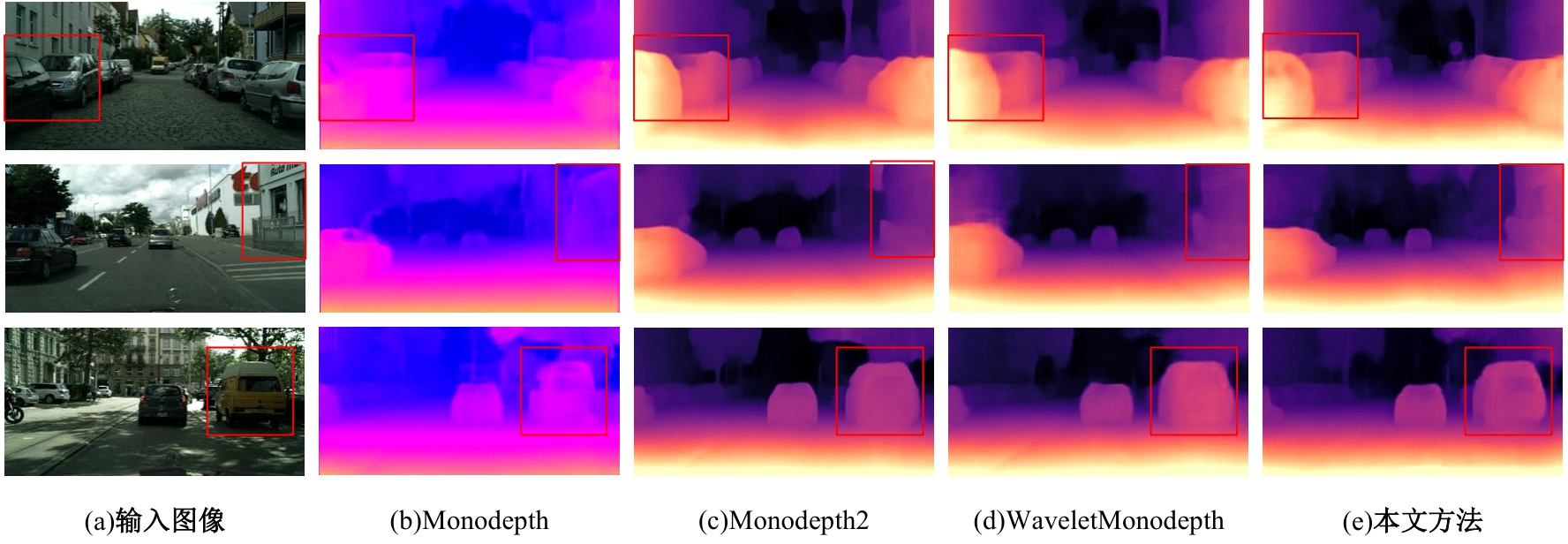
Self-supervised monocular depth estimation based on improved densenet and wavelet decomposition
De-qiang CHENG1( ),Wei-chen WANG1,Cheng-gong HAN1,Chen LYU1,Qi-qi KOU2()
),Wei-chen WANG1,Cheng-gong HAN1,Chen LYU1,Qi-qi KOU2()
- 1.School of Information and Control Engineering,China University of Mining and Technology,Xuzhou 221116,China
2.School of Computer Science and Technology,China University of Mining and Technology,Xuzhou,221116 China
CLC Number:
- TP391.41


| [1] | 王新竹, 李骏, 李红建, 等. 基于三维激光雷达和深度图像的自动驾驶汽车障碍物检测方法[J]. 吉林大学学报 (工学版), 2016, 46(2): 360-365. |
| Wang Xin-zhu, Li Jun, Li Hong-jian, et al. Obstacle detection based on 3D laser scanner and range image for intelligent vehicle[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(2): 360-365. | |
| [2] | 张宇翔, 任爽. 定位技术在虚拟现实中的应用综述[J]. 计算机科学, 2021, 48(1): 308-318. |
| Zhang Yu-xiang, Ren Shuang. Overview of the application of location technology in virtual reality[J]. Computer Science, 2021,48 (1): 308-318. | |
| [3] | 史晓刚, 薛正辉, 李会会, 等. 增强现实显示技术综述[J]. 中国光学, 2021, 14(5): 1146-1161. |
| Shi Xiao-gang, Xue Zheng-hui, Li Hui-hui, et al. Overview of augmented reality display technology [J]. China Optics, 2021, 14 (5): 1146-1161. | |
| [4] | Eigen D, Fergus R. Predicting depth, surface normals and semantic labels with a common multi-scale convolutional architecture[C]∥2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 2015: 2650-2658. |
| [5] | Fu H, Gong M, Wang C, et al. Deep ordinal regression network for monocular depth estimation[C]∥ 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 2002-2011. |
| [6] | Garg R, Vijay K B G, Carneiro G, et al. Unsupervised CNN for single view depth estimation: geomery to the rescue[C]∥European Conference Computer Vision, Amsterdam, Netherlands, 2016: 740-756. |
| [7] | Zhou T H, Brown M, Snavely N, et al. Unsupervised learning of depth and ego-motion from video[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Hawaii, USA, 2017: 1851-1858. |
| [8] | Clément G, Oisin M A, Michael F, et al. Digging into self-supervised monocular depth estimation[C]∥ 2015 IEEE International Conference on Computer Vision (ICCV), Seoul, South Korea, 2019: 3828-3838. |
| [9] | Ashutosh S, Sun M, Andrew Y N. Make3D:learning 3D scene structure from a single still image[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2008, 31(5): 824-840. |
| [10] | Eigen D, Puhrsch C, Fergus R. Depth map prediction from a single image using a multi-scale deep network[C]∥Advances in Neural Information Processing Systems, Montreal, Canada, 2014: 2366-2374. |
| [11] | Zachary T, Jia D. Deepv2D: video to depth with differentiable structure from motion[C]∥International Conference on Learning Representations (ICLR) 2020, Addis Ababa, Ethiopian, 2020: 181204605. |
| [12] | Benjamin U, Zhou H Z, Jonas U, et al. Demon: depth and motion network for learning monocular stereo[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Hawaii, USA, 2017: 5038-5047. |
| [13] | Clément G, Oisin M A, Gabriel J B. Unsupervised monocular depth estimation with left-right consistency[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Hawaii, USA, 2017: 270-279. |
| [14] | Bian J W, Li Z C, Wang N, et al. Unsupervised scale-consistent depth and ego-motion learning from monocular video[C]∥33rd Conference on Neural Information Processing Systems (NeurIPS), Vancouver, Canada, 2019: 1-12. |
| [15] | Han C, Cheng D, Kou Q, et al. Self-supervised monocular depth estimation with multi-scale structure similarity loss[J]. Multimedia Tools and Applications, 2022, 31: 3251-3266. |
| [16] | Xiang J, Wang Y, An L,et al. Visual attention-based self-supervised absolute depth estimation using geometric priors in autonomous driving[J/OL].(2022-10-06)[2023-06-13].. |
| [17] | Suri Z K. Pose constraints for consistent self-supervised monocular depth and ego-motion[J/OL].(2023-04-18)[2023-06-13].. |
| [18] | Houssem B, Adrian V, Andrew C. STDepthFormer: predicting spatio-temporal depth from video with a self-supervised transformer model[C]∥Detroit, USA, 2023: No.230301196. |
| [19] | Matteo P, Filippo A, Fabio T, et al. Towards real-time unsupervised monocular depth estimation on CPU[C]∥2018 IEEE/RSJ international Conference Intelligent Robots and Systems (IROS), Madrid, Spain, 2018: 5848-5854. |
| [20] | Diana W, Ma F C, Yang T J, et al. FastDepth: fast monocular depth estimation on embedded systems[C]∥2019 International Conference on Robotics and Automation (ICRA), Montreal, Canada, 2019: 6101-6108. |
| [21] | Michael R, Michael F, Jamie W, et al. Single image depth prediction with wavelet decomposition[C] ∥ Conference on Computer Vision and Pattern Recognition (CVPR), Online, 2021: 11089-11098. |
| [22] | Olaf R, Philipp F, Thomas B. U-Net: convolutional networks for biomedical image segmentation[C]∥International Conference On Medical Computing and Computer-Assisted Intervention (MICCAI), Munich, Germany, 2015: 234-241. |
| [23] | Huang G, Liu Z, Maaten L V D, et al. Densely connected convolutional networks[C]∥2017 Conference on Computer Vision and Pattern Recognition (CVPR), Hawaii, USA, 2017: 2261-2269. |
| [24] | He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]∥2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, USA, 2016: 770-778. |
| [25] | Chen X T, Chen X J, Zha Z J. Structure-aware residual pyramid network for monocular depth estimation[C]∥28th International Joint Conference on Artificial Intelligence, Macau, China, 2019: 694-700. |
| [26] | Geiger A, Lenz P, Stiller C, et al. Vision meets robotics: the kitti dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| [27] | Pleiss G, Chen D, Huang G, et al. Memory-efficient implementation of densenets[J/OL].(2017-07-21)[2023-06-13].. |
| [28] | Mehta I, Sakurikar P, Narayanan P J. Structured adversarial training for unsupervised monocular depth estimation[C]∥2018 International Conference on 3D Vision, Verona, Italy, 2018: 314-323. |
| [29] | Matteo P, Fabio T, Stefano M. Learning monocular depth estimation with unsupervised trinocular assumptions[C]∥International Conference on 3D Vision (3DV), Verona, Italy, 2018: 324-333. |
| [30] | Sudeep P, Rares A, Ambrus G, et al. Superdepth: self-supervised, super-resolved monocular depth estimation[C]∥2019 International Conference on Robotics and Automation (ICRA), Montreal, Canada, 2019: 9250-9256. |
| [1] | Jia-bao ZHANG,Jian-yang ZHANG,He LIU,Yan LI. Fast star point extraction with improved run-length encoding algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(4): 1467-1473. |
| [2] | Liu-bo HU,Jian-xin WU,Quan-hua LIU,Lei ZHANG. Staged suppression of main⁃lobe compound interference using airborne distributed arrays [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(3): 1103-1110. |
| [3] | Hai-tao WANG,Hui-zhuo LIU,Xue-yong ZHANG,Jian WEI,Xiao-yuan GUO,Jun-zhe XIAO. Forward-looking visual field reproduction for vehicle screen-displayed closed cockpit using monocular vision [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1435-1442. |
| [4] | Yu-ting SU,Meng-yao JING,Pei-guang JING,Xian-yi LIU. Deep photometric stereo learning framework for battery defect detection [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(12): 3653-3659. |
| [5] | Hui-jing DOU,Dong-xu XIE,Wei GUO,Lu-yang XING. Direction of arrival estimation based on improved orthogonal matching pursuit algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(12): 3568-3576. |
| [6] | Lin BAI,Lin-jun LIU,Xuan-ang LI,Sha WU,Ru-qing LIU. Depth estimation algorithm of monocular image based on self-supervised learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1139-1145. |
| [7] | Chun-yang WANG,Wen-qian QIU,Xue-lian LIU,Bo XIAO,Chun-hao SHI. Accurate segmentation method of ground point cloud based on plane fitting [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 933-940. |
| [8] | Xue-mei LI,Chun-yang WANG,Xue-lian LIU,Chun-hao SHI,Guo-rui LI. Point cloud registration method based on supervoxel bidirectional nearest neighbor distance ratio [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1918-1925. |
| [9] | Zhen WANG,Meng GAI,Heng-shuo XU. Surface reconstruction algorithm of 3D scene image based on virtual reality technology [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1620-1625. |
| [10] | Xue-mei LI,Chun-yang WANG,Xue-lian LIU,Da XIE. Time delay estimation of linear frequency-modulated continuous-wave lidar signals via SESTH [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 950-958. |
| [11] | Le-ping LIN,Zeng-tong LU,Ning OUYANG. Face reconstruction and recognition in non⁃cooperative scenes [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 2941-2946. |
| [12] | Hui-jing DOU,Gang DING,Jia GAO,Xiao LIANG. Wideband signal direction of arrival estimation based on compressed sensing theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2237-2245. |
| [13] | Xin-yu JIN,Mu-han XIE, SUN-Bin. Grain information compressed sensing based on semi-tensor product approach [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 379-385. |
| [14] | Li⁃min GUO,Xin CHEN,Tao CHEN. Radar signal modulation type recognition based on AlexNet model [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 1000-1008. |
| [15] | WANG Ji-xin, JI Jing-fang, ZHANG Ying-shuang, WANG Nai-xiang, ZHANG Er-ping, HUANG Jian-bing. Denoising method of time domain load signals of engineering vehicles based on wavelet and fractal theory [J]. 吉林大学学报(工学版), 2011, 41(增刊2): 221-225. |
|