Journal of Jilin University(Engineering and Technology Edition) ›› 2019, Vol. 49 ›› Issue (6): 2027-2037.doi: 10.13229/j.cnki.jdxbgxb20180592
Previous Articles Next Articles
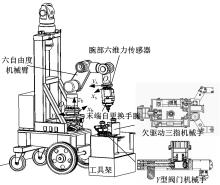
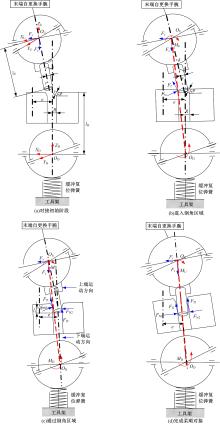
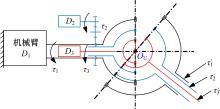
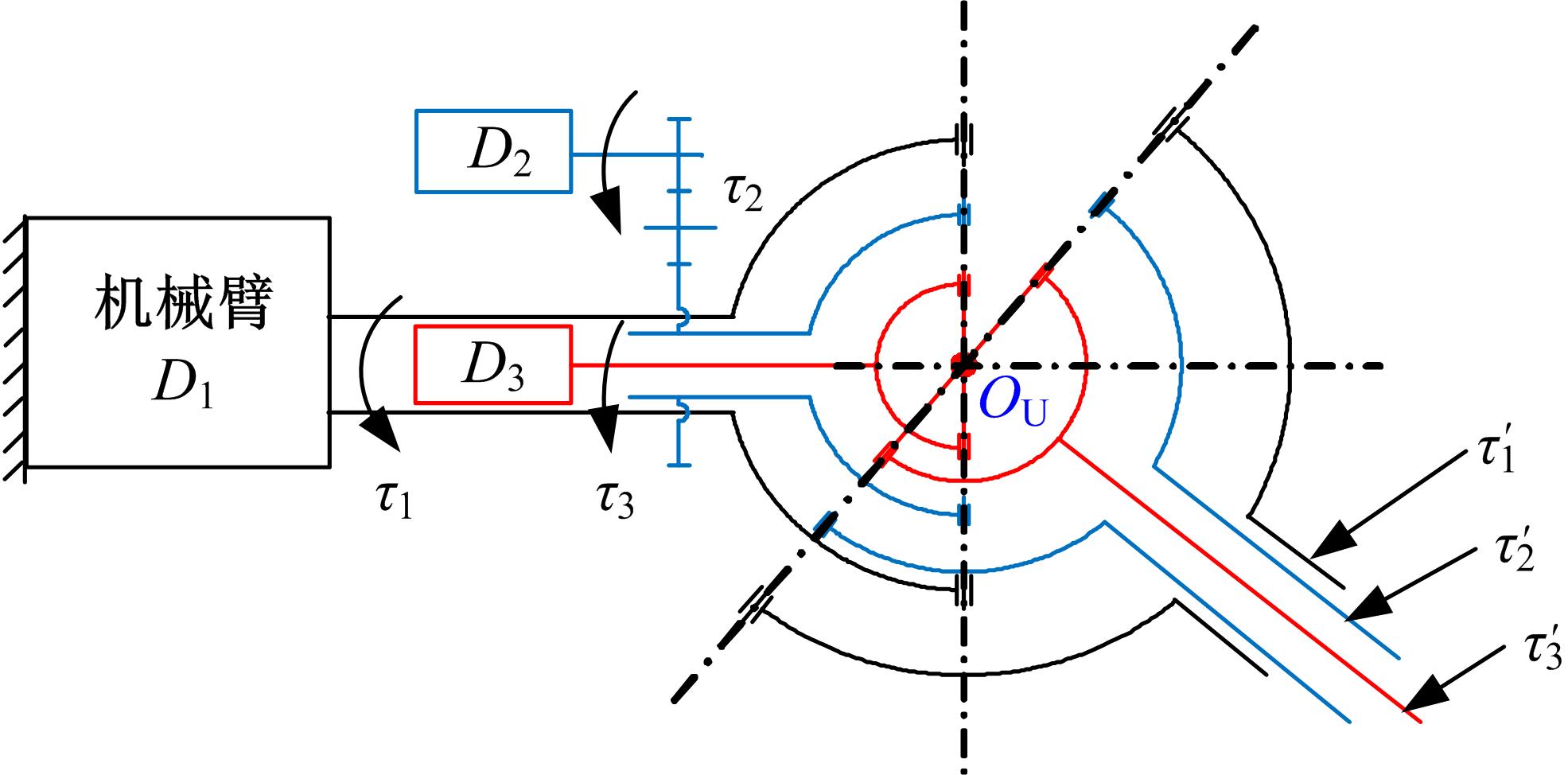
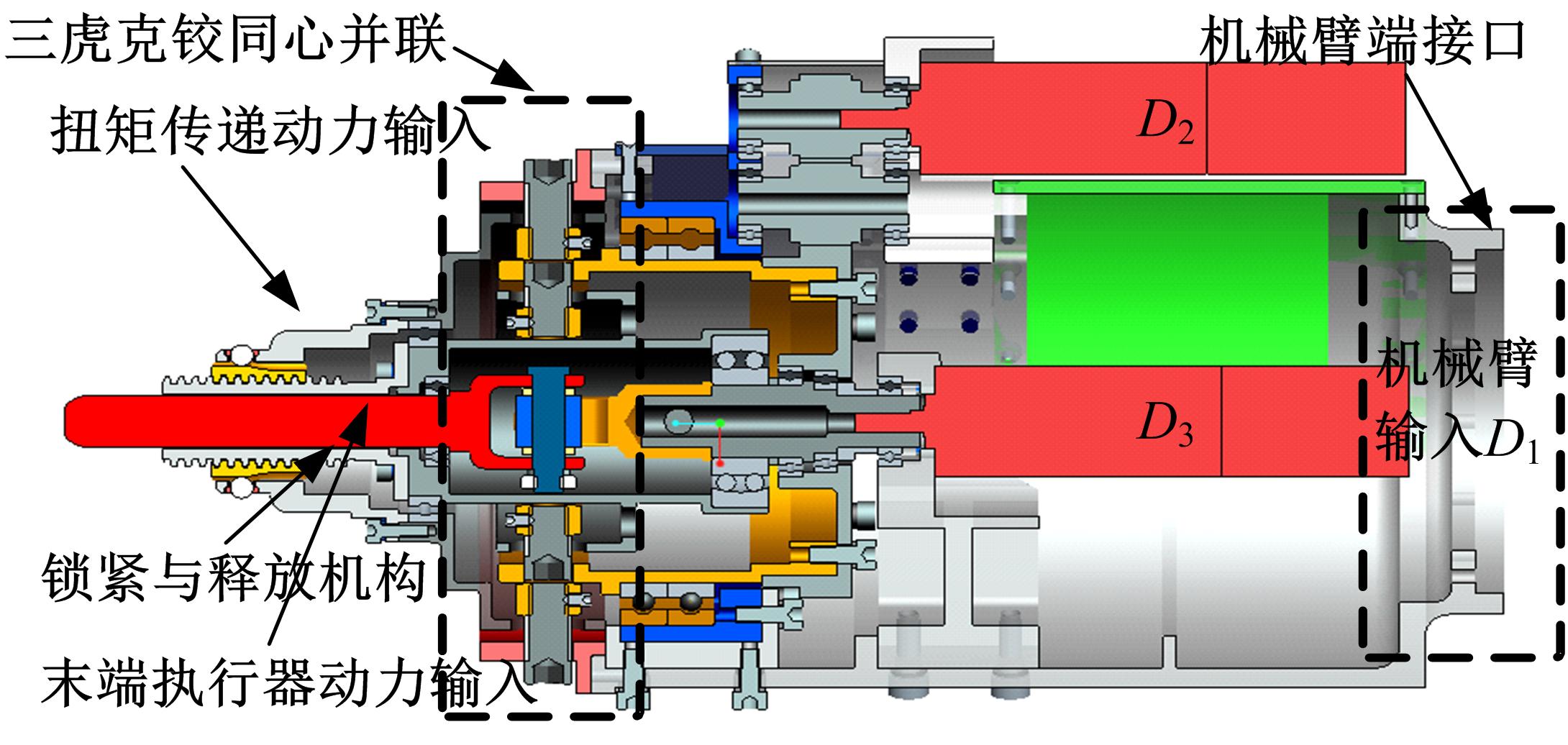
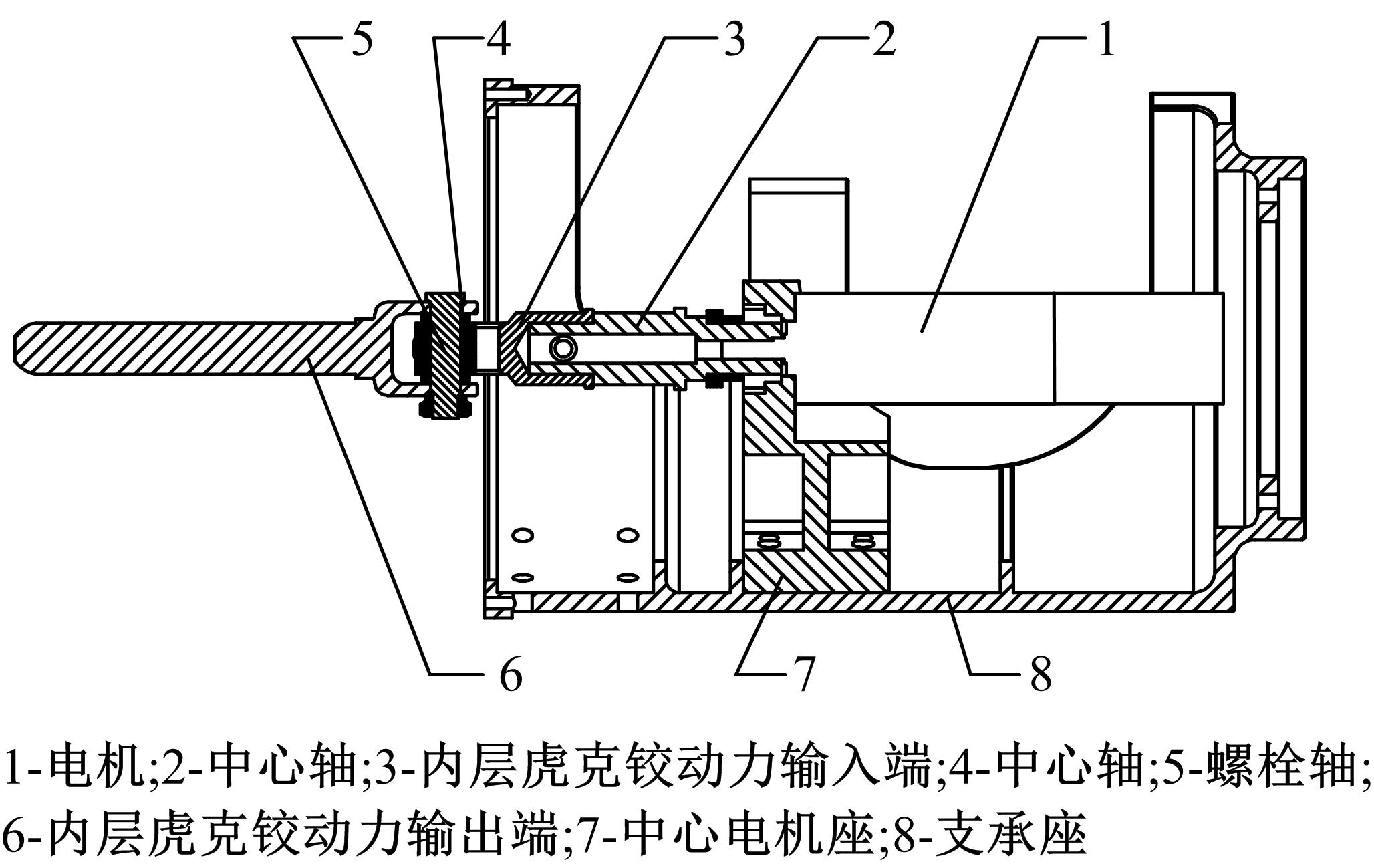
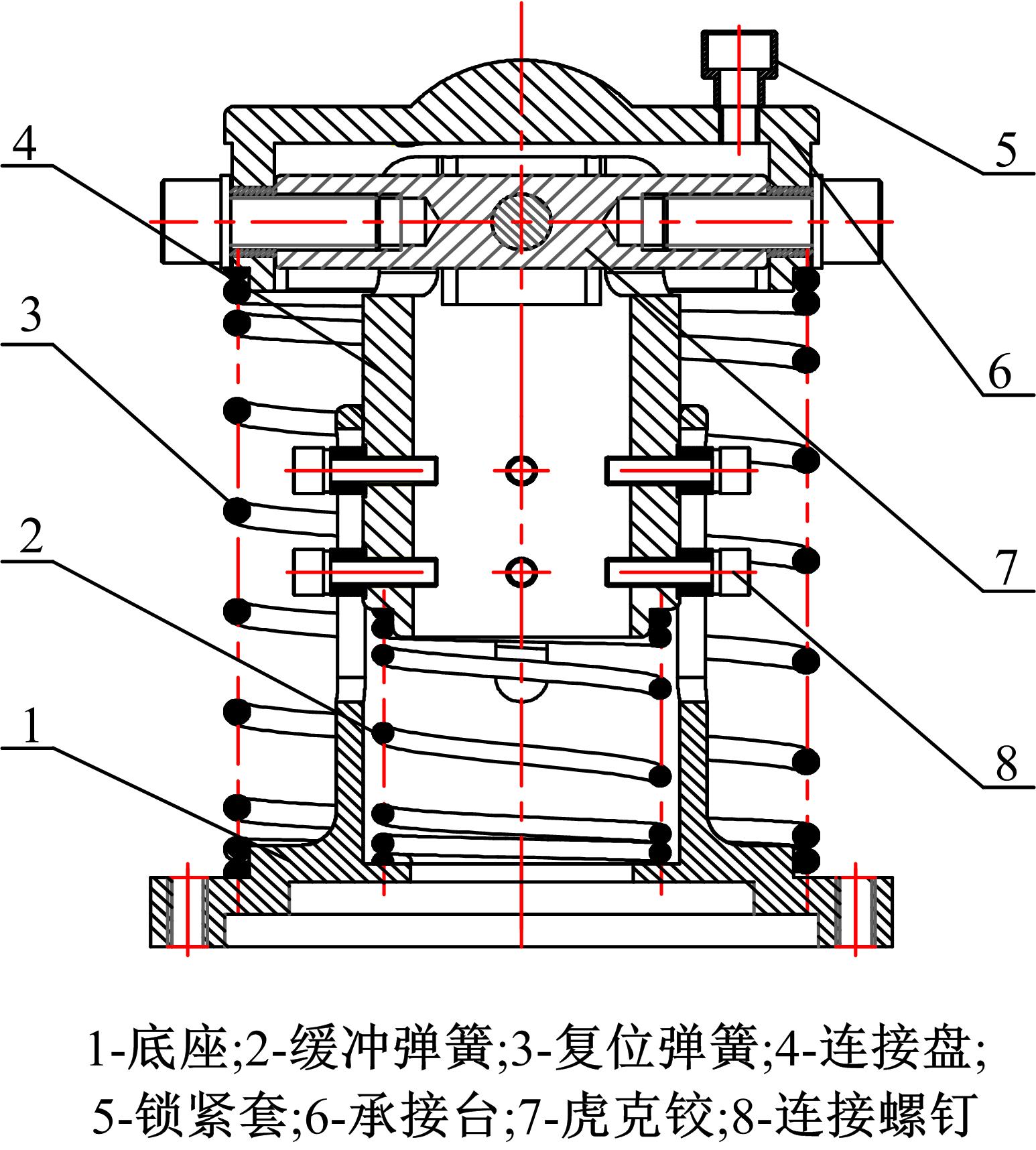
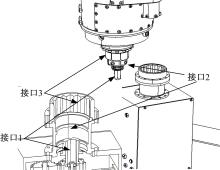
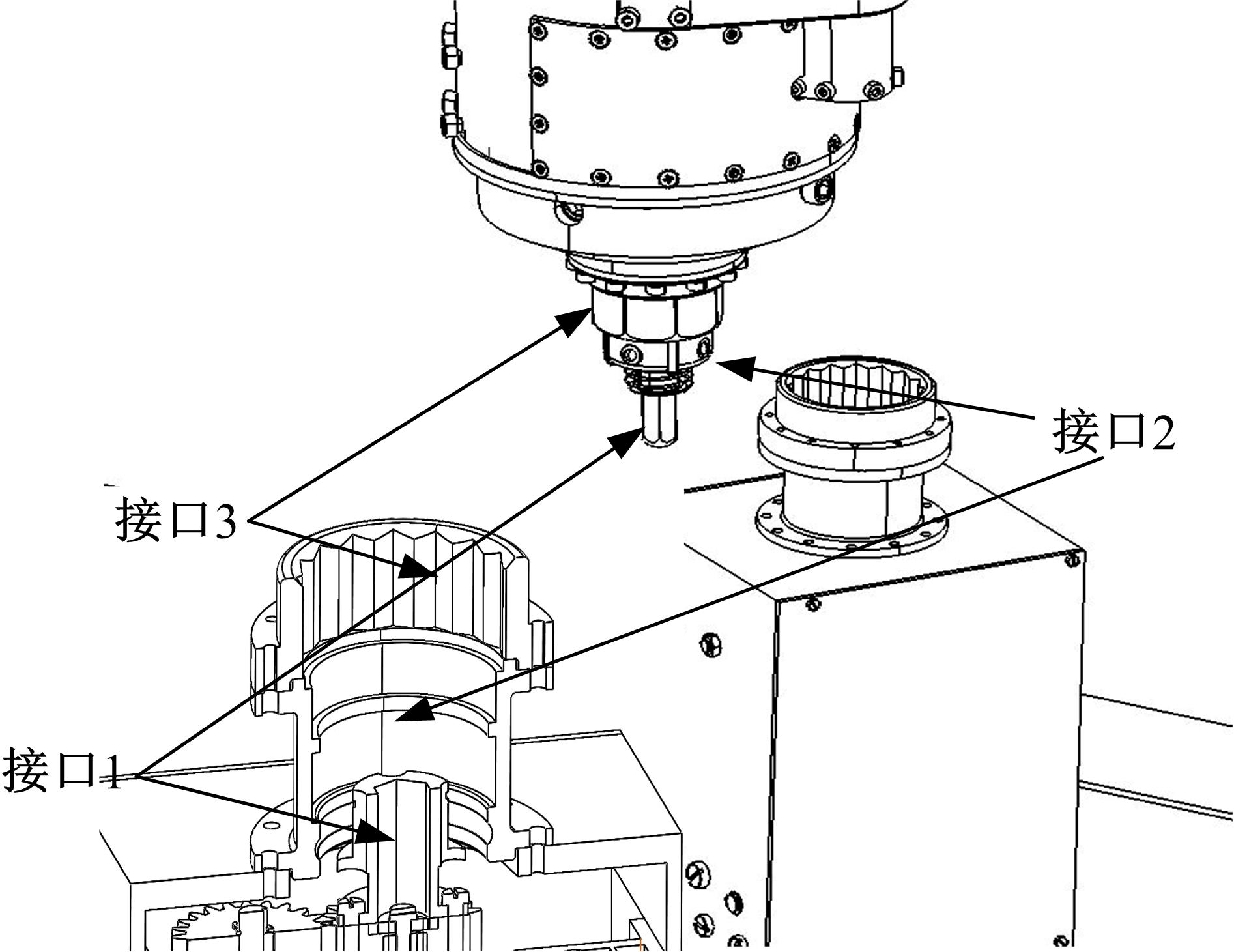
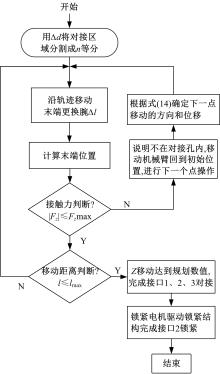
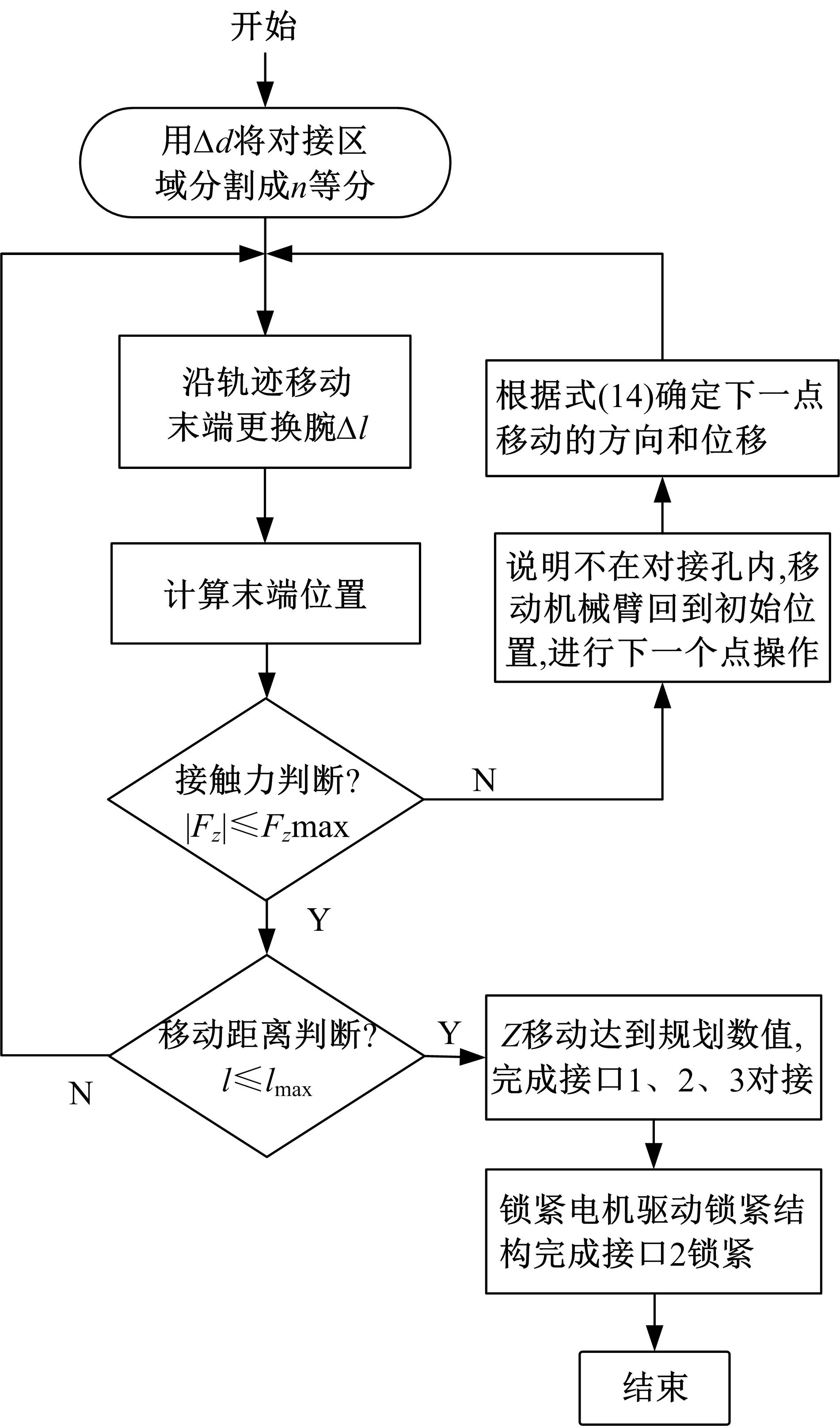
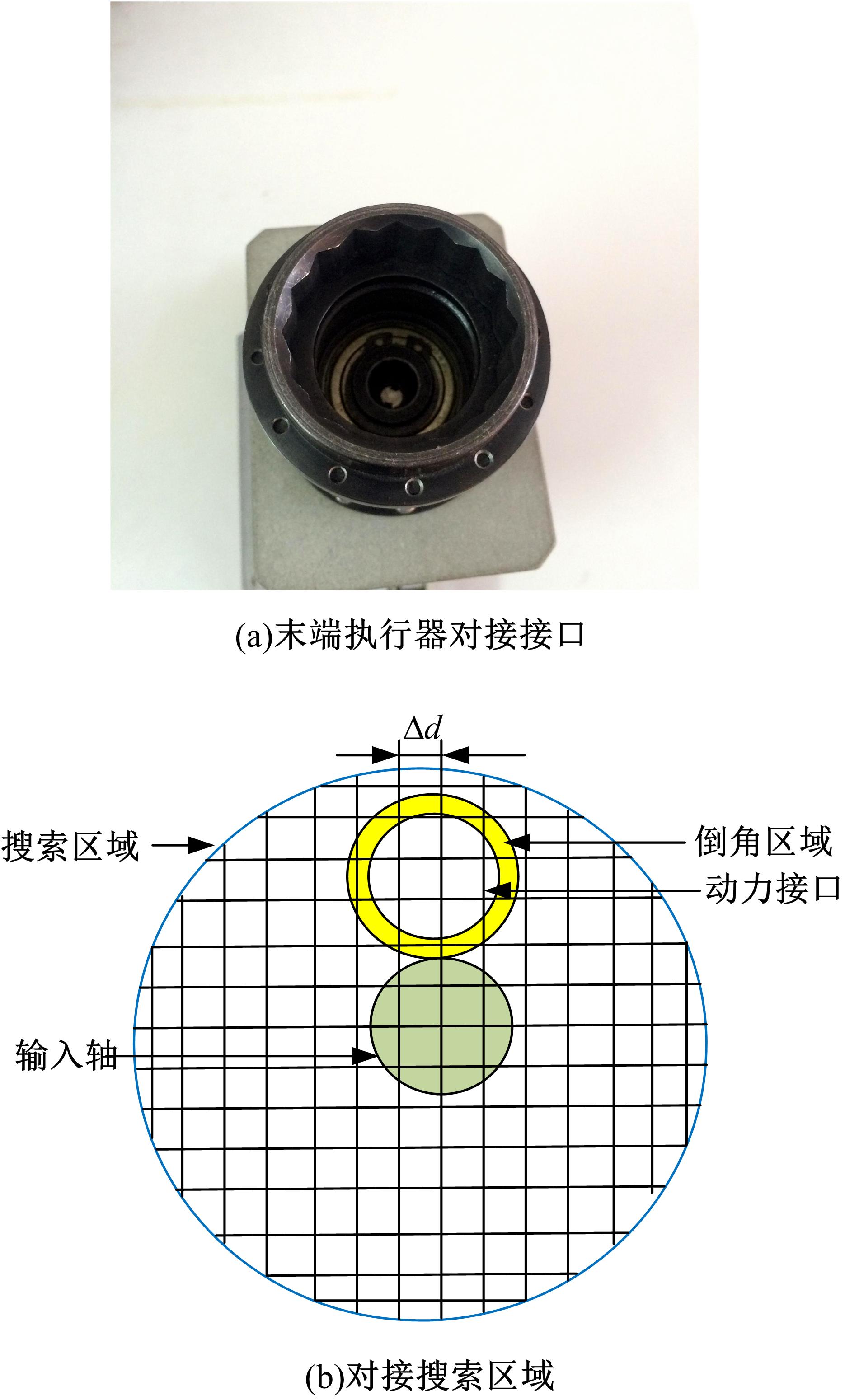
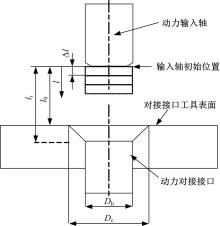
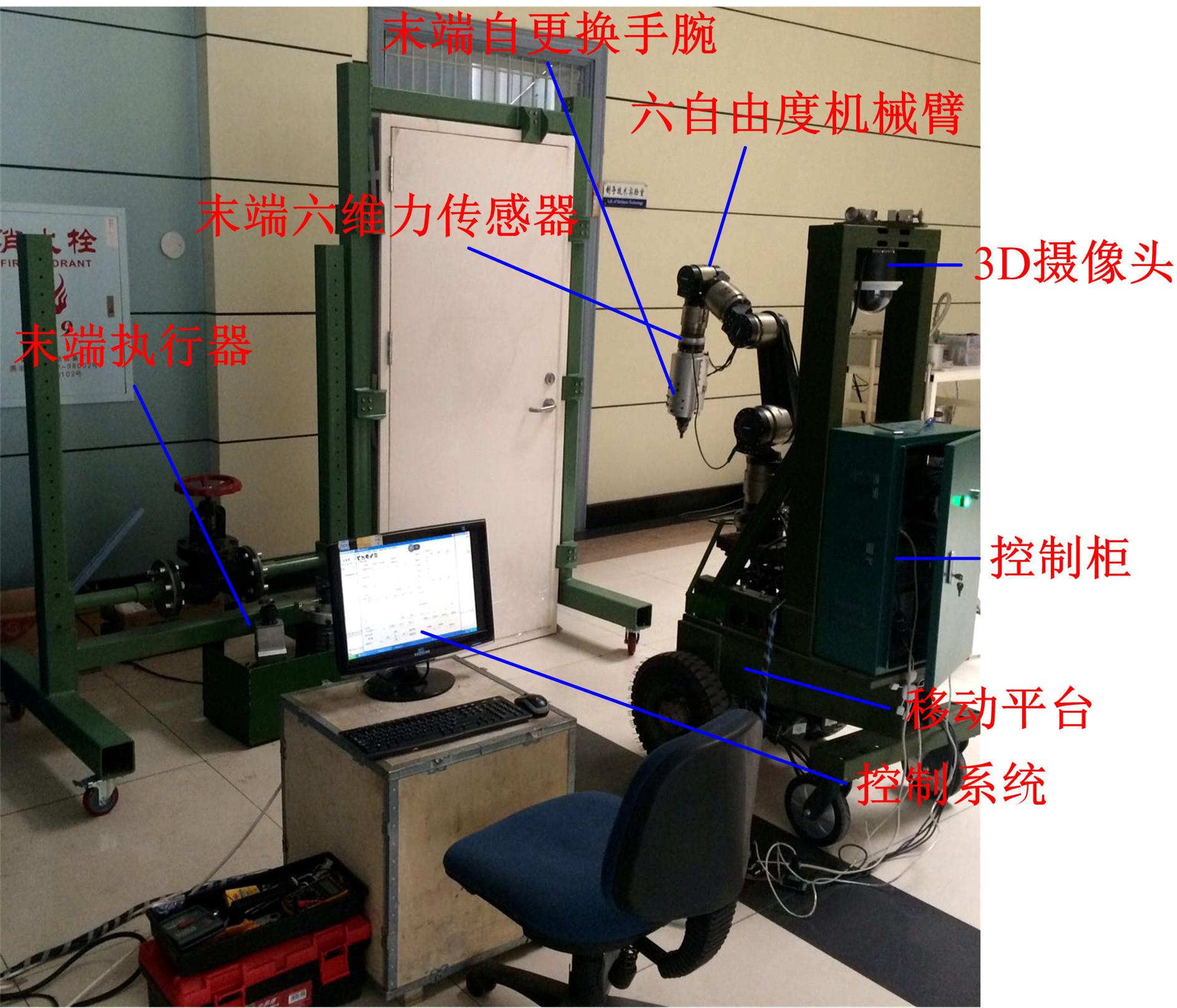
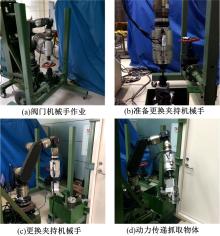
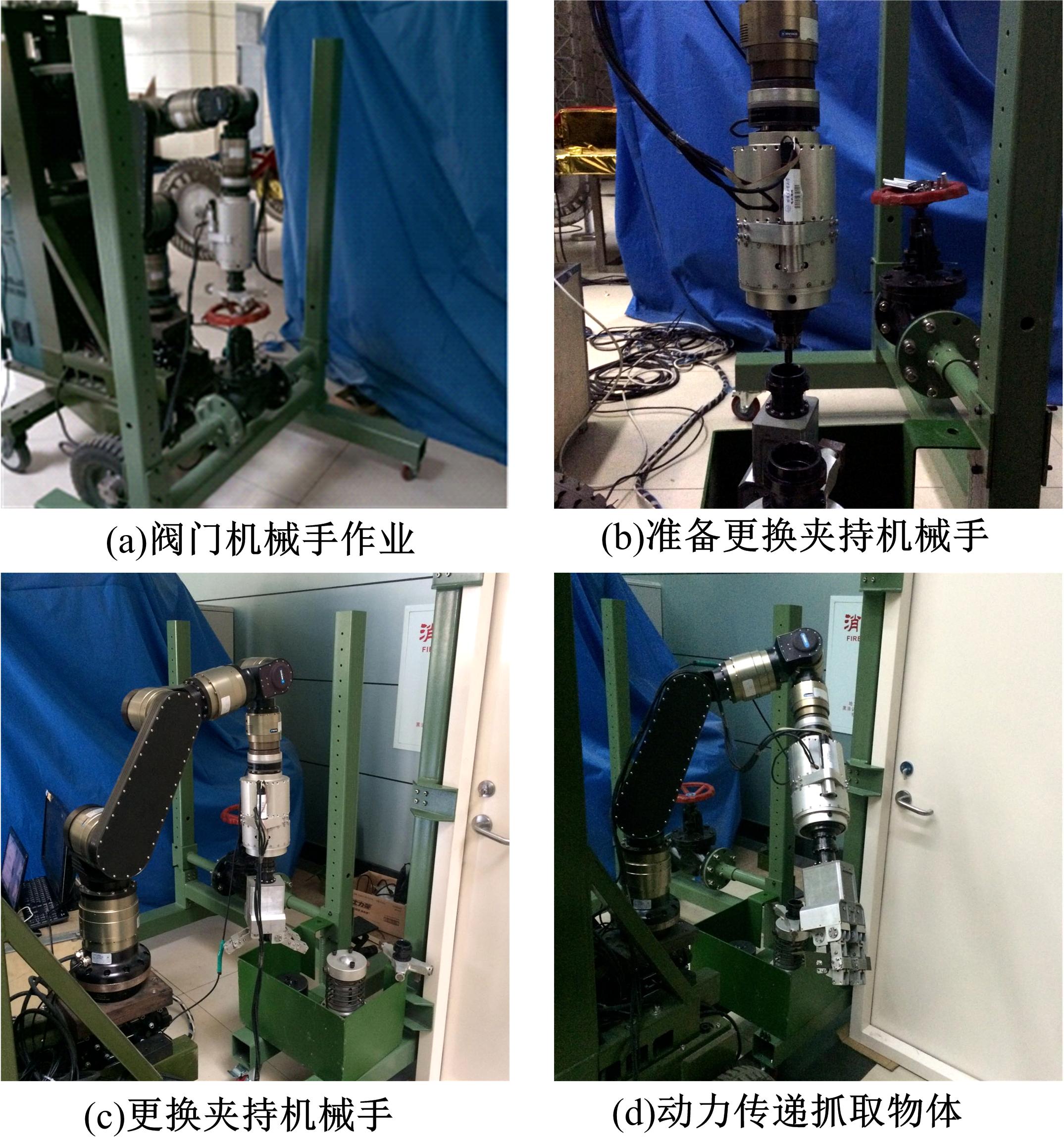
Mechanism design and docking strategy forend⁃effectors exchange of robot
Chang-you MA1,2( ),Hai-bo GAO1(),Liang DING1,Hai-tao YU1,Hong-jun XING1,Zong-quan DENG1
),Hai-bo GAO1(),Liang DING1,Hai-tao YU1,Hong-jun XING1,Zong-quan DENG1
- 1. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China
2. College of Mechanical Engineering, Jiamusi University, Jiamusi 154007, China
CLC Number:
- TH165




|
| [1] | Fu-chun JIA,Xian-jie MENG,Yu-long LEI. Optimal design of two degrees of freedom dynamic vibration absorber based on multi-objective genetic algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 1969-1976. |
| [2] | Zhi-jiang XIE,Kun WANG,Yang-jun PI,Xiao-yong WU,Ying-wei GUO. Novel method for forward kinematics of 6⁃PSSparallel manipulator [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 1977-1985. |
| [3] | En-guo CAO,Kun LIU,Shuo JI,Zhen-yuan SUN,Hong-wei XU,Xing-ji LUO. Mechanical structure design and optimization of weight-support STS rehabilitation training system [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1558-1566. |
| [4] | Jun-ye LI,Yang LIU,Hui LU,Wen-qing MENG,Zhao-jun YANG,Xin-ming ZHANG. Numerical analysis of single crystal Fe with abrasive grain micro-cutting based on molecular dynamics [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1567-1574. |
| [5] | Cheng YANG,Yong⁃sheng ZHAO,Zhi⁃feng LIU,Li⁃gang CAI. Stiffness model of bolted joint based on multi⁃scale theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1212-1220. |
| [6] | Kun LIU,Shuo JI,Zhen⁃yuan SUN,Hong⁃wei XU,Yong LIU,Jing⁃xia ZHAO. Mechanical structure design and optimization of multifunctional auxiliary toilet wheelchair [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 872-880. |
| [7] | Xing⁃ye WANG,Jin⁃qiu ZHANG,Guo⁃qiang LI,Zhi⁃zhao PENG. Influence of inertial mass on rack and pinion actuator′s damping characteristic [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 881-887. |
| [8] | Jia⁃xu WANG,Xiao⁃kang NI,Yan⁃feng HAN,Guo XIANG,Ke XIAO. Numerical model of mixed lubrication for microgroove bearing considering axial reciprocating motion [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 888-896. |
| [9] | BI Qiu-shi,WANG Guo-qiang,HUANG Ting-ting,MAO Rui,LU Yan-peng. Tooth strength analysis of mineral sizer by coupling discrete element method and finite element method [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1770-1776. |
| [10] | ZHU Wei,WANG Chuan-wei,GU Kai-rong,SHEN Hui-ping,XU Ke,WANG Yuan. Stiffness and dynamics analysis of a new type of tensegrity parallel mechanism [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1777-1786. |
| [11] | ZHAO Shuang,SHEN Ji-hong,ZHANG Liu,ZHAO Han,CHEN Ke-fan. Evaluation of surface roughness of micro electrical discharge machining based-on fast Gauss algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1838-1843. |
| [12] | LIU Jian-fang, WANG Ji-bo, LIU Guo-jun, LI Xin-bo, LIANG Shi-hai, YANG Zhi-gang. PMMA micromixer embedded with 3D channel based on piezoelectric actuation [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1500-1507. |
| [13] | SUN Xiu-rong, DONG Shi-min, WANG Hong-bo, LI Wei-cheng, SUN Liang. Comparison of multistage simulation models of entire sucker rod with spatial buckling in tubing [J]. 吉林大学学报(工学版), 2018, 48(4): 1124-1132. |
| [14] | WANG Tao, SAN Xiao-gang, GAO Shi-jie, WANG Hui-xian, WANG Jing, NI Ying-xue. Dynamic characteristics of vertical shaft system of photoelectric turntable [J]. 吉林大学学报(工学版), 2018, 48(4): 1099-1105. |
| [15] | LIU Kun, LIU Yong, YAN Jian-chao, JI Shuo, SUN Zhen-yuan, XU Hong-wei. Dynamic analysis of sit-to-stand human motion based on in vitro-sensor detection [J]. 吉林大学学报(工学版), 2018, 48(4): 1140-1146. |
|