Journal of Jilin University(Engineering and Technology Edition) ›› 2020, Vol. 50 ›› Issue (1): 77-83.doi: 10.13229/j.cnki.jdxbgxb20190114
Previous Articles Next Articles
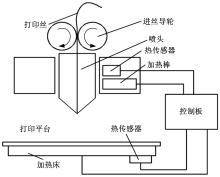
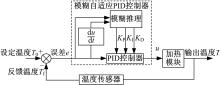
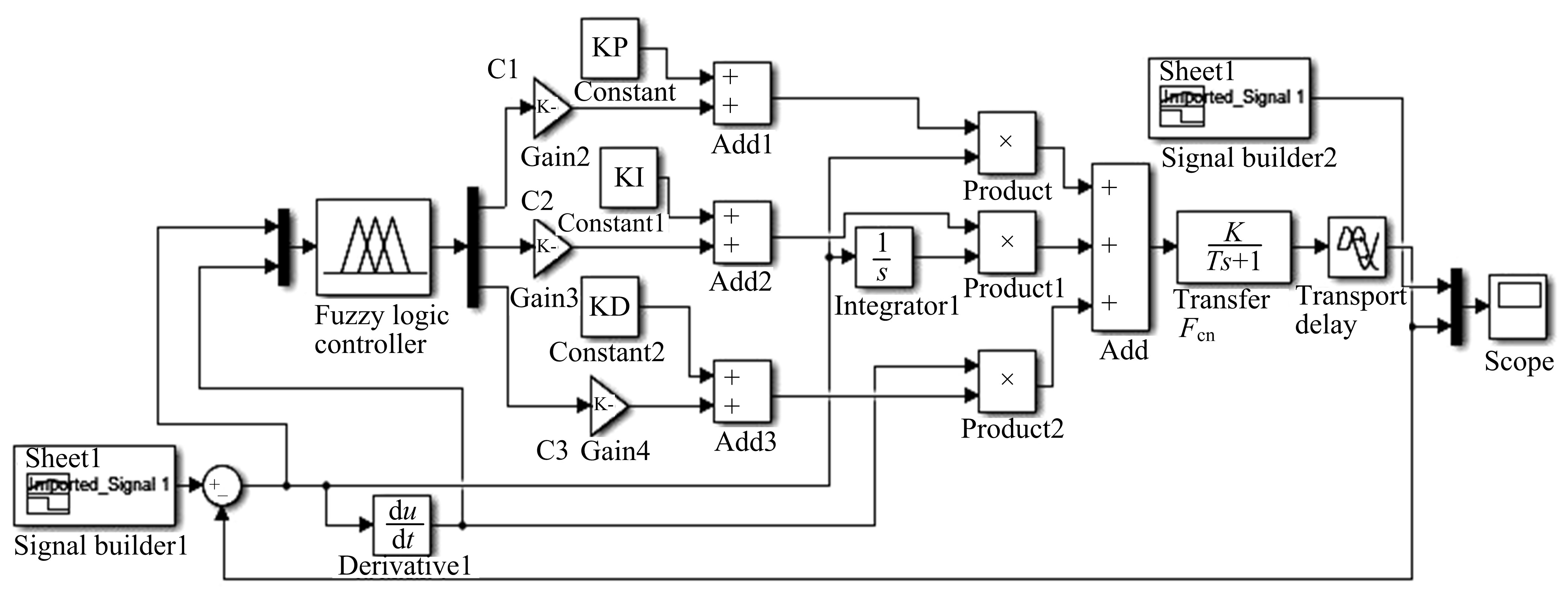
Fuzzy self⁃adaptive PID control for fused deposition modeling 3D printer heating system
Xing-tian QU( ),Xue-xu WANG,Hui-chao SUN(),Kun ZHANG,Long-wei YAN,Hong-yi WANG
),Xue-xu WANG,Hui-chao SUN(),Kun ZHANG,Long-wei YAN,Hong-yi WANG
- College of Mechanical and Aerospace Engineering, Jilin University, Changchun 130022, China
CLC Number:
- TP18














| 1 | Berman B .3-D printing: the new industrial revolution[J]. Business Horizons, 2012, 55(2): 155-162. |
| 2 | 申玄伟 . 熔融沉积成型3D打印中翘曲变形的仿真分析与状态识别方法研究[D]. 杭州:浙江大学机械工程学院, 2018. |
| Shen Xuan-wei . Research on simulation analysis and condition recognition technique of warp deformation in FDM 3D printing[D]. Hangzhou:School of Mechanical Engineering, Zhejiang University,2018. | |
| 3 | Xu Y , Zheng Y , Du Y , et al . Adaptive condition predictive-fuzzy PID optimal control of start-up process for pumped storage unit at low head area[J]. Energy Conversion and Management, 2018, 177: 592-604. |
| 4 | Guo X , Wang J , Liao F , et al . Neuroadaptive quantized PID sliding‐mode control for heterogeneous vehicular platoon with unknown actuator deadzone[J]. International Journal of Robust and Nonlinear Control, 2019, 29(1): 188-208. |
| 5 | Gaidhane P J , Nigam M J , Kumar A , et al . Design of interval type-2 fuzzy precompensated PID controller applied to two-DOF robotic manipulator with variable payload[J]. ISA Transactions, 2019, 89: 169-185. |
| 6 | 刘晓峰 . 覆带起重机起升系统双马达同步控制技术研究[D]. 长春:吉林大学机械科学与工程学院, 2012. |
| Liu Xiao-feng . Research on synchronous control technology of dual-motor in crawler crane lifting system[D]. Changchun: College of Mechanical Science and Engineering, Jilin University, 2012. | |
| 7 | 李静, 余春贤 . 基于模糊与PID的车辆底盘集成控制系统[J]. 吉林大学学报:工学版, 2013, 43(增刊1): 509-513. |
| Li Jing , Yu Chun-xian . Vehicle chassis integrated control system based on fuzzy and PID[J]. Journal of Jilin University (Engineering and Technology Edition), 2013, 43(Sup.1): 509-513. | |
| 8 | 曹婧华, 孔繁森, 冉彦中, 等 . 基于模糊自适应PID控制的空压机背压控制器设计[J]. 吉林大学学报:工学版, 2018, 48(3): 781-786. |
| Cao Jing-hua , Kong Fan-sen , Ran Yan-zhong ,et al . Back pressure controller design of air compressor based on fuzzy self-adaptive PID control[J]. Journal of Jilin University (Engineering and Technology Edition), 2018, 48(3): 781-786. | |
| 9 | Chehadeh M S , Boiko I . Design of rules for in-flight non-parametric tuning of PID controllers for unmanned aerial vehicles[J]. Journal of the Franklin Institute, 2019, 356(1): 474-491. |
| 10 | Wang J , Yang G . Data-driven approach to accommodating multiple simultaneous sensor faults in variable-gain PID systems[J]. IEEE Transactions on Industrial Electronics, 2019, 66(4): 3117-3126. |
| 11 | Sahoo B P , Panda S . Improved grey wolf optimization technique for fuzzy aided PID controller design for power system frequency control[J]. Sustainable Energy, Grids and Networks, 2018, 16: 278-299. |
| 12 | Bakhtiari-Shahri M , Moeenfard H . Optimal design of a stable fuzzy controller for beyond pull-in stabilization of electrostatically actuated circular micro-plates[J]. Journal of Vibration and Acoustics, 2018, 141(1): No.011019. |
| [1] | Fu LIU,Yi AN,Bo DONG,Yuan-chun LI. Decentralized energy guaranteed cost decentralized optimal control of reconfigurable robots based on ADP [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 342-350. |
| [2] | Miao-miao MA,Jun-jun PAN,Xiang-jie LIU. Model predictive load frequency control of microgrid with electrical vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1644-1652. |
| [3] | Shu⁃you YU,Lei TAN,Wu⁃yang WANG,Hong CHEN. Control of active four wheel steering vehicle based ontriple⁃step method [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 934-942. |
| [4] | Hai⁃ying WEN,Xiang REN,Wei⁃liang XU,Ming CONG,Wen⁃long QIN,Shu⁃hai HU. Bionic design and experimental test of temporomandibular joint for masticatory robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 943-952. |
| [5] | GU Wan-li,WANG Ping,HU Yun-feng,CAI Shuo,CHEN Hong. Nonlinear controller design of wheeled mobile robot with H∞ performance [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1811-1819. |
| [6] | LI Zhan-dong,TAO Jian-guo,LUO Yang,SUN Hao,DING Liang,DENG Zong-quan. Design of thrust attachment underwater robot system in nuclear power station pool [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1820-1826. |
| [7] | WANG De-jun, WEI Wei-li, BAO Ya-xin. Actuator fault diagnosis of ESC system considering crosswind interference [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1548-1555. |
| [8] | YAN Dong-mei, ZHONG Hui, REN Li-li, WANG Ruo-lin, LI Hong-mei. Stability analysis of linear systems with interval time-varying delay [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1556-1562. |
| [9] | ZHANG Ru-bin, ZHAN Li-kui, PENG Wei, SUN Shao-ming, LIU Jun-fu, REN Lei. Constant power control in cardiopulmonary function evaluation and training system [J]. 吉林大学学报(工学版), 2018, 48(4): 1184-1190. |
| [10] | TIAN Yan-tao, ZHANG Yu, WANG Xiao-yu, CHEN Hua. Estimation of side-slip angle of electric vehicle based on square-root unscented Kalman filter algorithm [J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
| [11] | ZHANG Shi-tao, ZHANG Bao, LI Xian-tao, WANG Zheng-xi, TIAN Da-peng. Enhancing performance of FSM based on zero phase error tracking control [J]. 吉林大学学报(工学版), 2018, 48(3): 853-858. |
| [12] | WANG Lin, WANG Hong-guang, SONG Yi-feng, PAN Xin-an, ZHANG Hong-zhi. Behavior planning of a suspension insulator cleaning robot for power transmission lines [J]. 吉林大学学报(工学版), 2018, 48(2): 518-525. |
| [13] | HU Yun-feng, WANG Chang-yong, YU Shu-you, SUN Peng-yuan, CHEN Hong. Structure parameters optimization of common rail system for gasoline direct injection engine [J]. 吉林大学学报(工学版), 2018, 48(1): 236-244. |
| [14] | ZHU Feng, ZHANG Bao, LI Xian-tao, WANG Zheng-xi, ZHANG Shi-tao. Gyro signal processing based on strong tracking Kalman filter [J]. 吉林大学学报(工学版), 2017, 47(6): 1868-1875. |
| [15] | JIN Chao-qiong, ZHANG Bao, LI Xian-tao, SHEN Shuai, ZHU Feng. Friction compensation strategy of photoelectric stabilized platform based on disturbance observer [J]. 吉林大学学报(工学版), 2017, 47(6): 1876-1885. |
|
||