Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (1): 44-54.doi: 10.13229/j.cnki.jdxbgxb.20220224
Previous Articles Next Articles
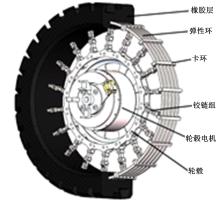
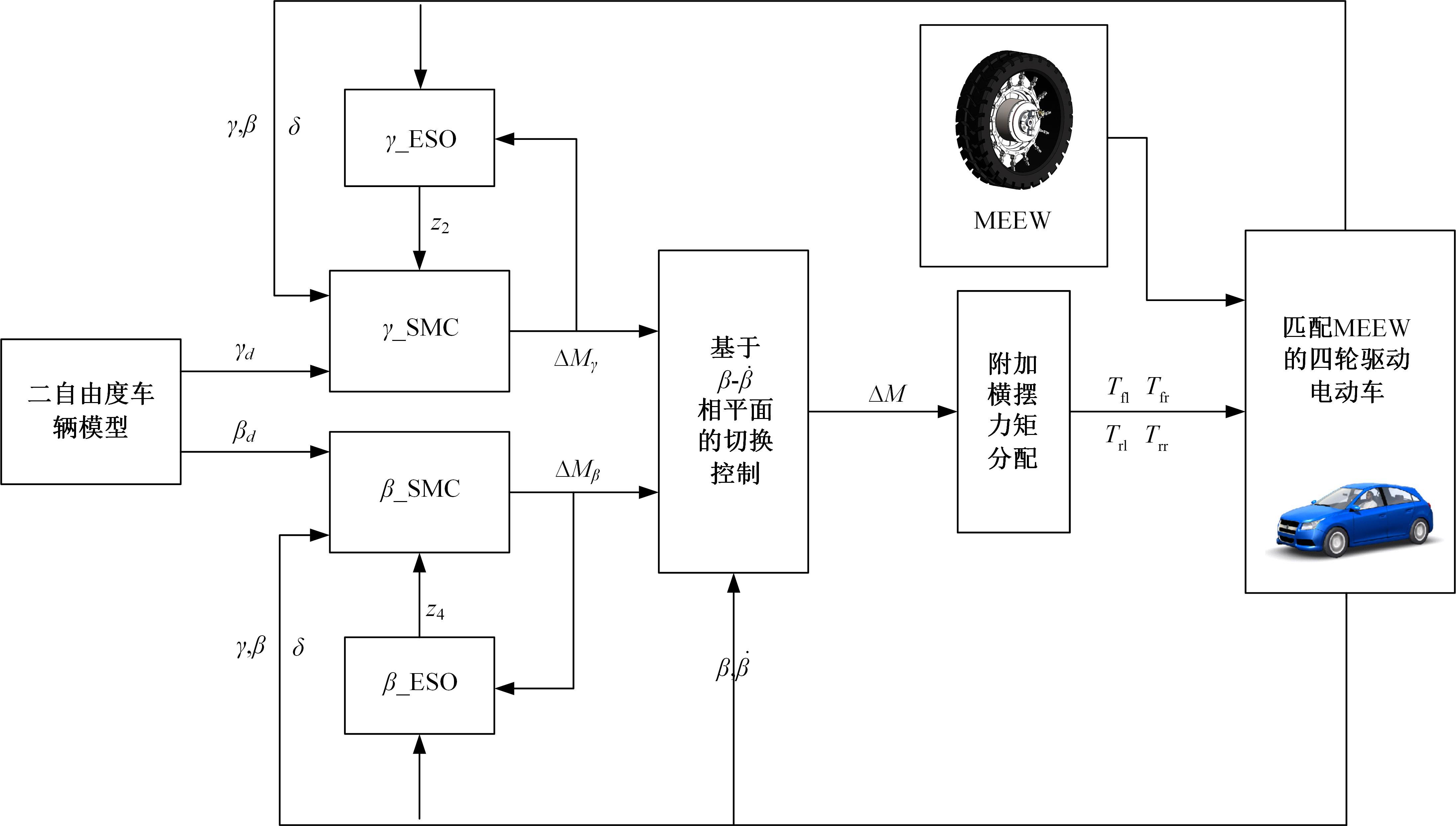
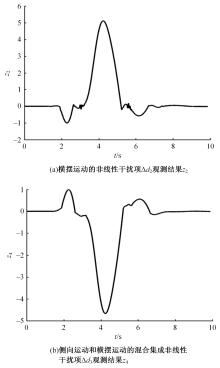
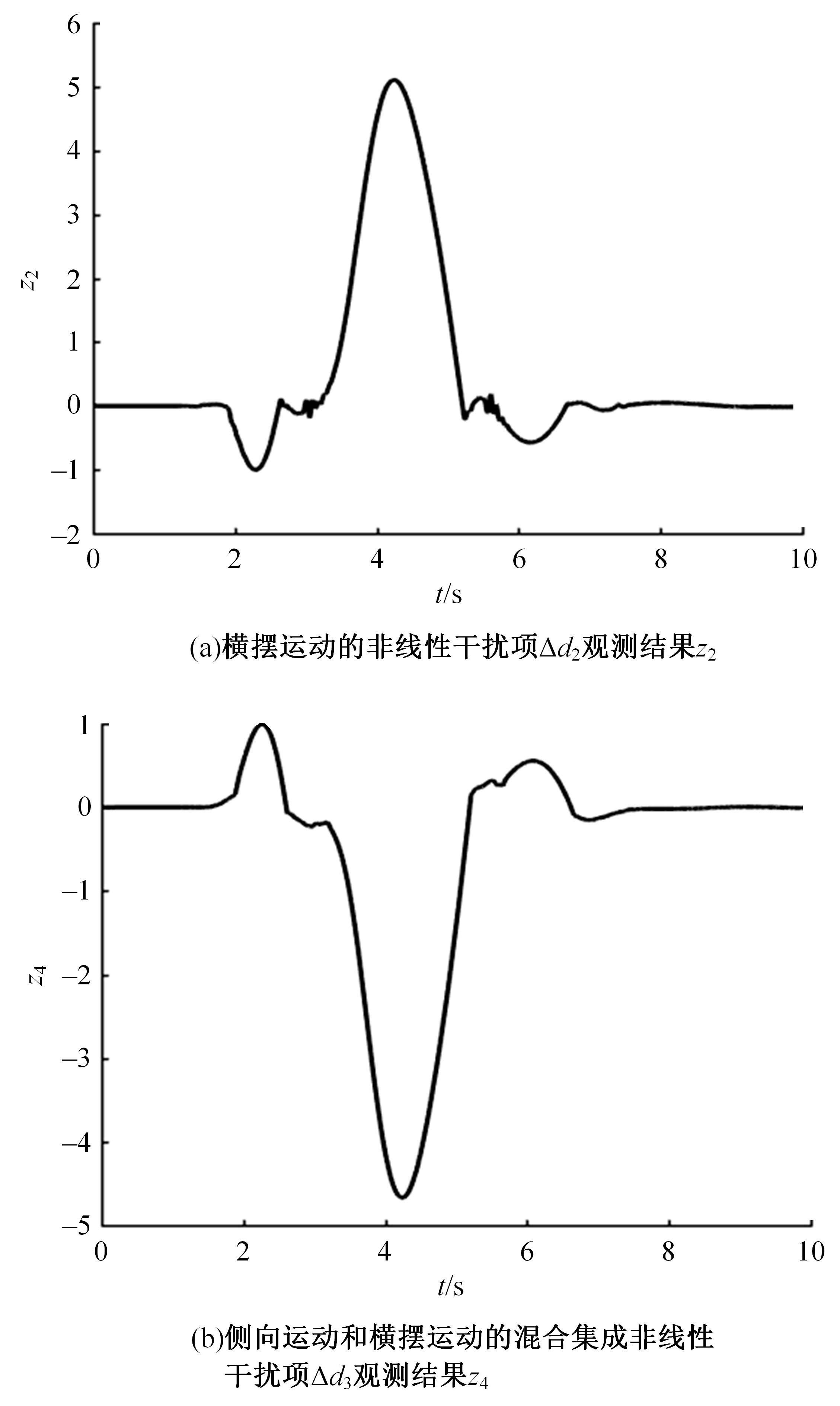
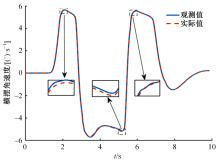
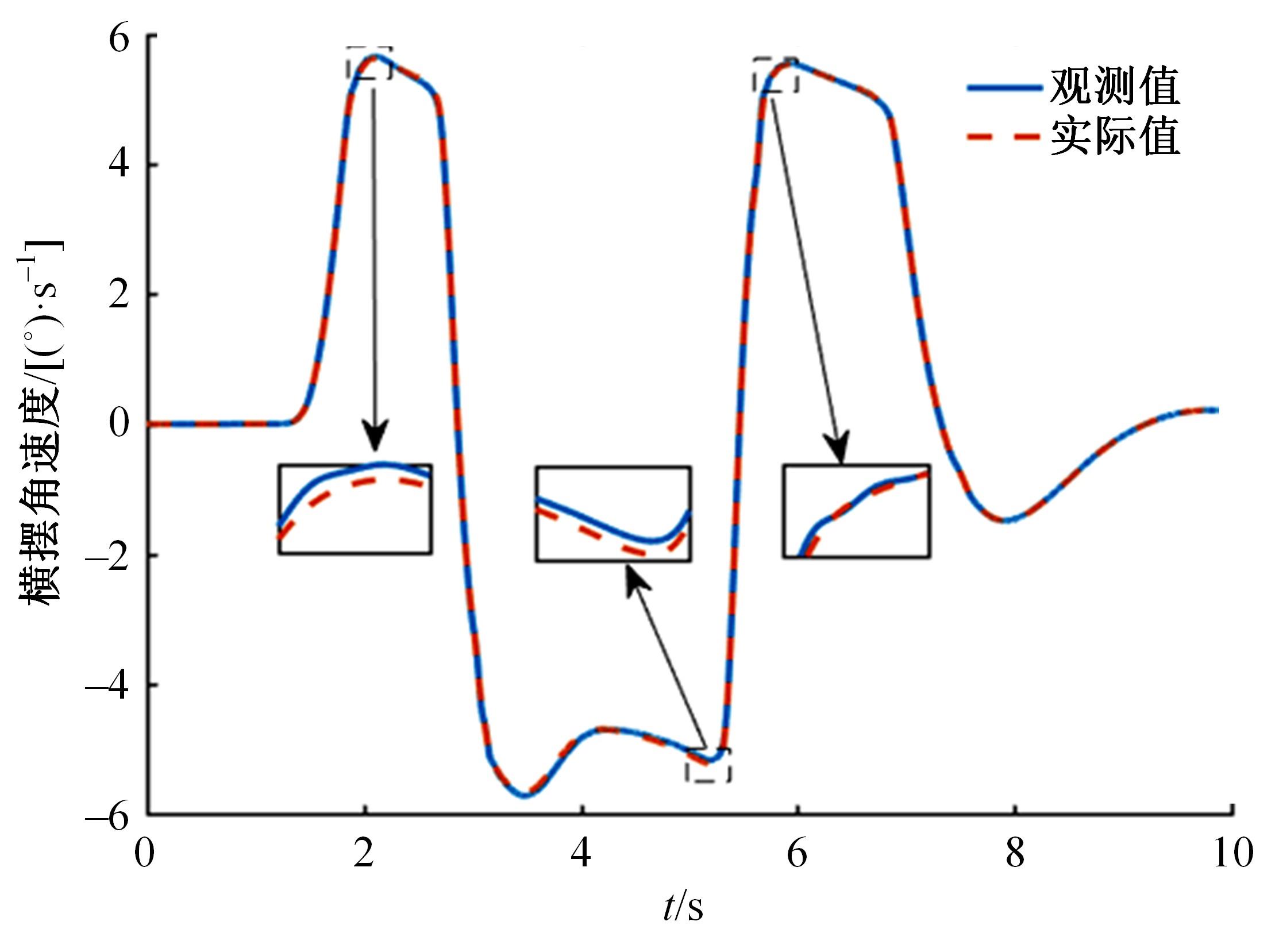
Stability control of with mechanical elastic electric wheeled vehicles based on extended state observer
You-qun ZHAO( ),Tao LIN,Fen LIN,Huan SHEN
),Tao LIN,Fen LIN,Huan SHEN
- College of Energy and Power Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
CLC Number:
- U461.6


| 1 | Tang Xiao-lin, Hu Xiao-song, Yang Wei, et al. Novel torsional vibration modeling and assessment of a power-split hybrid electric vehicle equipped with a dual mass flywheel[J]. IEEE Transactions on Vehicular Technology, 2018, 67(3): 1990-2000. |
| 2 | Wang Jun-nian, Gao Shou-lin, Wang Kai, et al. Wheel torque distribution optimization of four-wheel independent-drive electric vehicle for energy efficient driving[J]. Control Engineering Practice, 2021, 110:No.104779. |
| 3 | Ji Xue-wu, He Xiang-kun, Lv Chen, et al. A vehicle stability control strategy with adaptive neural network sliding mode theory based on system uncertainty approximation[J]. Vehicle System Dynamics, 2018, 56(6): 923-946. |
| 4 | Parra A, Tavernini D, Gruber P, et al. On nonlinear model predictive control for energy-efficient torque-vectoring[J]. IEEE Transactions on Vehicular Technology, 2021, 70(1): 173-188. |
| 5 | 谢伟东, 徐威, 付志军,等. 分布式驱动电动汽车的近似最优转矩矢量控制[J]. 汽车工程, 2018, 40(11): 1308-1316. |
| Xie Wei-dong, Xu Wei, Fu Zhi-jun, et al. Approximate optimal torque vectoring control for distributed drive electric vehicle[J]. Automotive Engineering, 2018, 40(11): 1308-1316. | |
| 6 | 赵又群, 李宇昊, 邓汇凡, 等. 基于Popov超稳定性的分布式电动汽车稳定性控制[J].吉林大学学报:工学版,2022,52(10):2225-2233. |
| Zhao You-qun, Li Yu-hao, Deng Hui-fan,et al. Stability control of distributed electric vehicle based on Popov hyperstability[J]. Journal of Jilin University(Engineering and Technology Edition), 2022,52(10):2225-2233. | |
| 7 | Zhao You-qun, Zang Li-guo, Chen Yue-qiao, et al. Non-pneumatic mechanical elastic wheel natural dynamic characteristics and influencing factors[J]. Journal of Central South University, 2015, 22(5): 1707-1715. |
| 8 | Deng Yao-ji, Zhao You-qun, Xu Han, et al. Finite element modeling of interaction between non-pneumatic mechanical elastic wheel and soil[J]. Journal of Automobile Engineering, 2019, 233(13): 3293-3304. |
| 9 | Du Xian-bin, Zhao You-qun, Lin Fen, et al. Numerical and experimental investigation on the camber performance of a non-pneumatic mechanical elastic wheel[J]. Journal of the Brazilian Society of Mechanical Sciences & Engineering, 2017, 39(9): 3315-3327. |
| 10 | 赵又群. 非充气机械弹性安全车轮理论与方法[M]. 北京: 科学出版社,2020. |
| 11 | Xu Han, Zhao You-qun, Ye Chao, et al. Integrated optimization for mechanical elastic wheel and suspension based on an improved artificial fish swarm algorithm[J]. Advances in Engineering Software, 2019,137:No.102722. |
| 12 | Wang Qiu-wei, Zhao You-qun, Xu Han, et al. Adaptive backstepping control with grey signal predictor for nonlinear active suspension system matching mechanical elastic wheel[J]. Mechanical Systems and Signal Processing, 2019, 131:97-111. |
| 13 | 李海青, 赵又群. 匹配机械弹性车轮的汽车稳定性分析[J]. 哈尔滨工业大学学报, 2019, 51(1): 71-79. |
| Li Hai-qing, Zhao You-qun. Stability of vehicles with mechanical elastic wheel[J]. Journal of Harbin Institute of Technology, 2019, 51(1): 71-79. | |
| 14 | 郑鑫, 赵又群, 王秋伟, 等. 匹配机械弹性车轮的电子稳定控制器参数分析[J]. 中国机械工程, 2020, 31(23): 2883-2890. |
| Zheng Xin, Zhao You-qun, Wang Qiu-wei, et al. Parameter analysis of electronic stability controller matching mechanical elastic wheels[J]. China Mechanical Engineering, 2020, 31(23): 2883-2890. | |
| 15 | Deng Hui-fan, Zhao You-qun, Feng Shi-lin, et al. Torque vectoring algorithm based on mechanical elastic electric wheels with consideration of the stability and economy[J]. Energy, 2021, 219:No.119643. |
| 16 | Pacejka H. Tire and Vehicle Dynamics[M].New York: Elsevier,2005. |
| 17 | 张荣芸, 黄鹤, 陈无畏, 等. 基于功能分配与多目标模糊决策的EPS和ESP协调控制[J]. 机械工程学报, 2014, 50(6): 99-106. |
| Zhang Rong-yun, Huang He, Chen Wu-wei, et al. Coordinated control of EPS and ESP based on function allocation and multi-objective fuzzy decision[J]. Journal of Mechanical Engineering, 2014, 50(6): 99-106. | |
| 18 | Shibahata Y, Shimada K, Tomari T. Improvement of vehicle maneuverability by direct yaw moment control[J]. Vehicle System Dynamics, 1993, 22(5/6):465-481. |
| 19 | 韩京清. 从PID技术到“自抗扰控制”技术[J]. 控制工程, 2002, 9(3): 13-18. |
| Han Jing-qing. From PID technique to active disturbances rejection control technique[J]. Control Engineering of China, 2002, 9(3): 13-18. | |
| 20 | Guo Bao-zhu, Zhao Zhi-liang. On the convergence of an extended state observer for nonlinear systems with uncertainty[J]. Systems and Control Letters, 2011, 60(6): 420-430. |
| 21 | Khoo S, Xie L. Integral terminal sliding mode cooperative control of multi-robot networks[C]∥IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 2009: 969-973. |
| 22 | 王德平, 郭孔辉, 宗长富. 车辆动力学稳定性控制的仿真研究[J]. 汽车技术, 1999(2): 8-10. |
| Wang De-ping, Guo Kong-hui, Zong Chang-fu. The simulation study of vehicle dynamic stability control[J]. Automobile Technology, 1999(2): 8-10. | |
| 23 | 王文伟, 赵一凡, 张伟,等. 多轴轮边驱动铰接客车的横摆稳定性控制策略[J]. 机械工程学报, 2020, 56(14): 161-172. |
| Wang Wen-wei, Zhao Yi-fan, Zhang Wei, et al. Yaw stability control strategy of multi-wheel independent electric articulated bus[J]. Journal of Mechanical Engineering, 2020, 56(14): 161-172. | |
| 24 | Nocedal J, Wright S. Numerical Optimization[M]. Berlin: Springer, 2006. |
| 25 | Peng Hao-nan, Wang Wei-da, Xiang Chang-le, et al. Torque coordinated control of four in-wheel motor independent-drive vehicles with consideration of the safety and economy[J]. IEEE Transactions on Vehicular Technology, 2019, 68(10): 9604-9618. |
| [1] | Yan-min WANG,Wei-qi ZHANG,Guang-xin DUAN,Yang GE. Continuous non-singular terminal sliding mode control of electronic throttle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(7): 2127-2135. |
| [2] | Ya-jing YU,Jian GUO,Rong-hao WANG,Wei QIN,Ming-wu SONG,Zheng-rong XIANG. Time⁃varying formation control of multi⁃quadrotor unmanned aerial vehicles based on state observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 871-882. |
| [3] | Long-long CHEN,Tian-yu FENG,Zong-yang LYU,Yu-hu WU. Finite⁃time sliding mode attitude control for coaxial tilt⁃rotor unmanned aerial vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 883-890. |
| [4] | Shou-rui WANG,Wu-yin JIN,Zhi-yuan RUI,Xia ZHANG. Payload swing control for 3D overhead crane based on fast non⁃singular terminal sliding mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(12): 3508-3517. |
| [5] | Bing CHEN,Kai-xuan MA,Yang LIU,Jiang REN,Chen-xi ZHANG,Tao-shuo ZHAO. Straight driving stability hierarchical control for dual-motor driving electric tracked vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(10): 2752-2760. |
| [6] | Guang-di HU,Hao JING,Cheng LI,Biao FENG,Xiao-dong LIU. Multi⁃objective sliding mode control based on high⁃order fuel cell model [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2182-2191. |
| [7] | Chong ZHANG,Yun-feng HU,Xun GONG,Yao SUN. Design of model⁃free adaptive sliding mode controller for cathode flow of fuel cell [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2085-2095. |
| [8] | Jun-cheng WANG,Lin-feng LYU,Jian-min LI,Jie-yu REN. Optimal sliding mode ABS control for electro⁃hydraulic composite braking of distributed driven electric vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1751-1758. |
| [9] | Zhi-jun YANG,Zhong-yi GAO,Li-jun WANG,Guan-xin HUANG,Yu-tai WEI. Model predictive control algorithm for rigid⁃flexible coupling positioning stage [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 2806-2815. |
| [10] | Dong-hui WEI,Ai-ting WANG,Jing-hong JI,Jun-long FANG. Adaptive fuzzy fractional⁃order sliding mode precise motion control of permanent magnet linear synchronous motor [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2295-2303. |
| [11] | Jiang-qi LONG,Jin-tao XIANG,Ping YU,Jun-cheng WANG. Linear disturbance observer suitable for sliding mode control of nonlinear active suspension [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1230-1240. |
| [12] | Jia-xu ZHANG,Xin-zhi WANG,Jian ZHAO,Zheng-tang SHI. Path planning and discrete sliding mode tracking control for high⁃speed lane changing collision avoidance of vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1081-1090. |
| [13] | Jing LI,Qiu-jun SHI,Liang HONG,Peng LIU. Commercial vehicle ESC neural network sliding mode control based on vehicle state estimation [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1545-1555. |
| [14] | Ai-guo WU,Jun-qing HAN,Na DONG. Adaptive sliding mode control based on ultra⁃local model for robotic manipulator [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1905-1912. |
| [15] | Wei WANG,Jian-ting ZHAO,Kuan-rong HU,Yong-cang GUO. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 464-471. |
|
||