Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (11): 3358-3371.doi: 10.13229/j.cnki.jdxbgxb.20230043
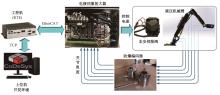
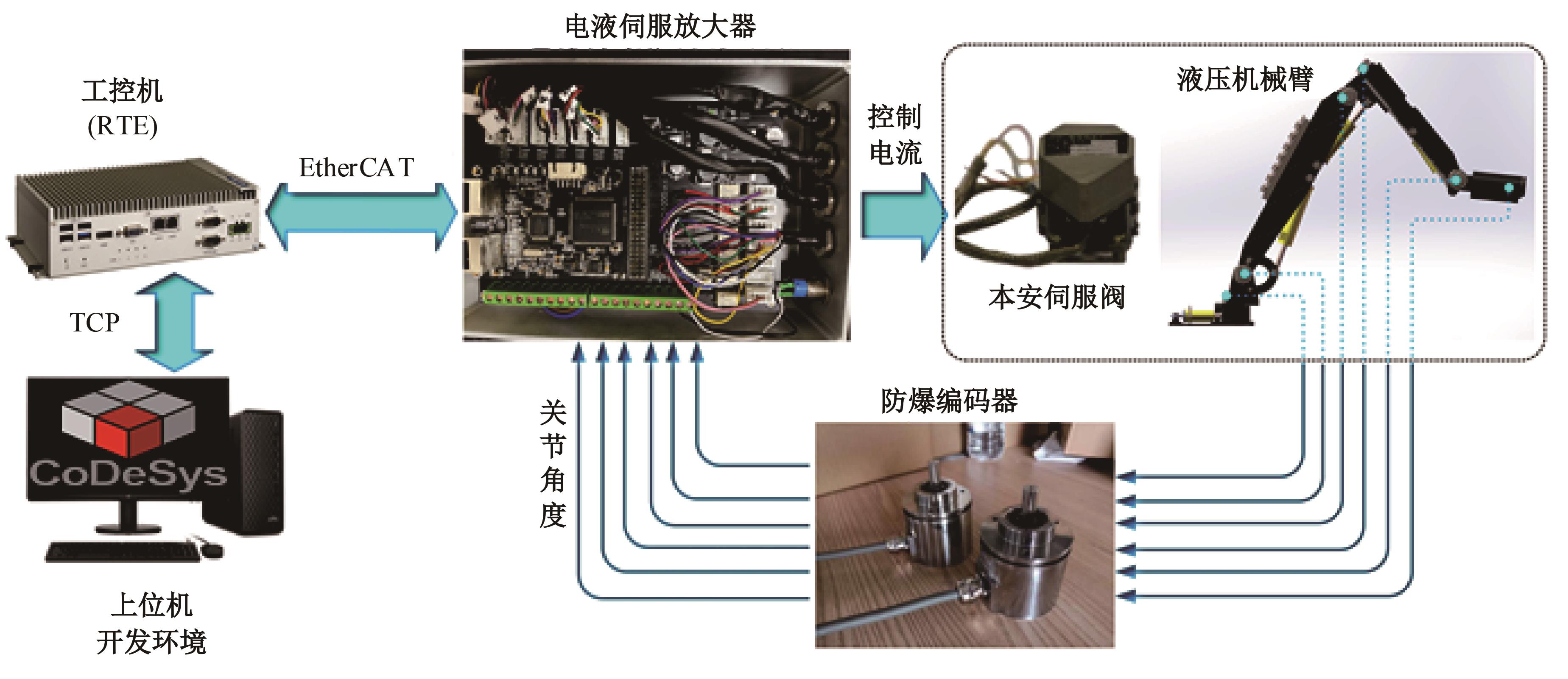
Research and application of the centralized drive and control system for a hydraulic manipulator
Yu-kun ZHENG1,2( ),Ru-yue SUN1,2,Feng-ming LI3,Yi-xiang LIU1,2,Dong-guang LI4,Rui SONG1,2()
),Ru-yue SUN1,2,Feng-ming LI3,Yi-xiang LIU1,2,Dong-guang LI4,Rui SONG1,2()
- 1.School of Control Science and Engineering,Shandong University,Jinan 250061,China
2.Engineering Research Center of Intelligent Unmanned System,Ministry of Education,Jinan 250061,China
3.School of Information and Electrical Engineering,Shandong Jianzhu University,Jinan 250101,China
4.CITIC HIC KAICHENG Intelligence Equipment Co. ,Ltd. ,Tangshan 063020,China
CLC Number:
- TP242.3








| 1 | Yao J, Deng W. Active disturbance rejection adaptive control of hydraulic servo systems[J]. IEEE Transactions on Industrial Electronics,2017, 64(10): 8023-8032. |
| 2 | Zhang L, Zhao J, Long P, et al. An autonomous excavator system for material loading tasks[J]. Sci Robot, 2021, 6(55): eabc3164. |
| 3 | Zhang J, Li W, Yu J, et al. Development of a virtual platform for telepresence control of an underwater manipulator mounted on a submersible vehicle[J]. IEEE Transactions on Industrial Electronics, 2017, 64(2): 1716-1727. |
| 4 | Li Z, Ma X, Li Y, et al. ADRC-ESMPC active heave compensation control strategy for offshore cranes[J]. Ships and Offshore Structures, 2020, 15(10): 1098-1106. |
| 5 | 张旭飞, 邵焱, 付玉琴, 等. 起重机变幅系统Simcenter 3D机液联合仿真分析[J].机械工程学报, 2022, 58(24): 334-341. |
| Zhang Xu-fei, Shao Yan, Fu Yu-qin, et al. Mechanical and hydraulic co-simulation analysis for crane luffing system based on simcenter 3D[J]. Journal of Mechanical Engineering, 2022, 58(24): 334-341. | |
| 6 | Koivumaki J, Mattila J. Stability-guaranteed impedance control of hydraulic robotic manipulators[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(2): 601-612. |
| 7 | Pi Y, Wang X. Trajectory tracking control of a 6-DOF hydraulic parallel robot manipulator with uncertain load disturbances[J]. Control Engineering Practice, 2011, 19(2): 185-193. |
| 8 | 陈鹰. 海底热液科学考察中的机电装备技术[J]. 机械工程学报, 2002(): 207-211. |
| Chen Ying. Mechatronic devices in the scientific expedition of deep-ser vents[J]. Journal of Mechanical Engineering, 2002(Sup.1): 207-211. | |
| 9 | Sivčev S, Coleman J, Omerdić E, et al. Underwater manipulators: a review[J]. Ocean Engineering, 2018, 163: 431-450. |
| 10 | 陶军. 大洋深处强国梦——我国首台4 500米级无人遥控潜水器“海马号”[J]. 国土资源科普与文化, 2016, 2016(1): 13-19. |
| Tao Jun. Deep ocean power dream— China's first 4 500 meters unmanned remote control submersible "Haima"[J]. Scientific and Cultural Popularization of Natural Resources, 2016, 2016(1): 13-19. | |
| 11 | 王清梅, 王秀莲, 孙斌, 等. 水下主从伺服液压机械手控制系统设计[J]. 液压与气动, 2013, 2013(11): 33-37. |
| Wang Qing-mei, Wang Xiu-lian, Sun Bin, et al. Design of underwater master-slave hydraulic servo manipulator control system[J]. Chinese Hydraulics & Pneumatics, 2013, 2013(11): 33-37. | |
| 12 | Cortés J, Egerstedt M. Coordinated control of multi-robot systems: a survey[J]. SICE Journal of Control, Measurement, and System Integration, 2017, 10(6): 495-503. |
| 13 | Guo Q, Chen Z, Shi Y, et al. Synchronous control for multiple electrohydraulic actuators with feed-back linearization[J]. Mechanical Systems and Signal Processing, 2022, 178: No.109280. |
| 14 | Hoang Q D, Park J, Lee S G. Combined feedback linearization and sliding mode control for vibration suppression of a robotic excavator on an elastic foundation[J]. Journal of Vibration and Control, 2021, 27(3/4): 251-263. |
| 15 | Lin Y, Shi Y, Burton R. Modeling and robust discrete-time sliding-mode control design for a fluid power electrohydraulic actuator (EHA) system[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(1): 1-10. |
| 16 | Yao J, Deng W. Active disturbance rejection adaptive control of hydraulic servo systems[J]. IEEE Transactions on Industrial Electronics, 2017, 64(10): 8023-8032. |
| 17 | 李元春, 王蒙, 盛立辉, 等. 液压机械臂基于反演的自适应二阶滑模控制[J]. 吉林大学学报: 工学版, 2015, 45(1): 193-201. |
| Li Yuan-chun, Wang Meng, Sheng Li-hui, et al. Adaptive second order sliding mode control for hydraulic manipulator based on backstepping[J]. Journal of Jilin University (Engineering and Technology Edition), 2015, 45(1): 193-201. | |
| 18 | Won D, Kim W, Shin D, et al. High-gain disturbance observer-based backstepping control with output tracking error constraint for electro-hydraulic systems[J]. IEEE Transactions on Control Systems Technology, 2015, 23(2): 787-795. |
| 19 | Guo K, Wei J, Tian Q. Nonlinear adaptive position tracking of an electro-hydraulic actuator[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2015, 229(17): 3252-3265. |
| 20 | Guo K, Wei J, Fang J, et al. Position tracking control of electro-hydraulic single-rod actuator based on an extended disturbance observer[J]. Mechatronics, 2015, 27: 47-56. |
| 21 | 方一鸣,焦宗夏,王文宾,等. 轧机液压伺服位置系统的自适应反步滑模控制[J]. 电机与控制学报, 2011, 15(10): 95-100. |
| Fang Yi-ming, Jiao Zong-xia, Wang Wen-bin, et al. Adaptive backstepping sliding mode control for rolling mill hydraulic servo position system[J]. Electrical Machine and Control, 2011, 15(10): 95-100. | |
| 22 | Powel M J D. Updating conjugate directions by the BFGS formula[J]. Mathematical Programming, 1987, 38(1): 29-46. |
| [1] | Peng SHEN,Xiao-hua LI,Hui LIU. Prescribed finite-time tracking control with input buffer for a manipulator system [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(1): 63-73. |
| [2] | Bin XIAN,Guang-yi WANG,Jia-ming CAI. Nonlinear robust control design for multi unmanned aerial vehicles suspended payload transportation system [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(6): 1788-1795. |
| [3] | Hong-zhi WANG,Ting-ting WANG,Miao-miao LAN,Shuo XU. A novel sliding mode control strategy of multi-motor for robot arm based on position tracking [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1443-1458. |
| [4] | Jun ZHAO,Zi-liang ZHAO,Qing-lin ZHU,Bin GUO. Output⁃feedback robust control of uncertain systems without observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 828-835. |
| [5] | Yan-min WANG,Wei-qi ZHANG,Guang-xin DUAN,Yang GE. Continuous non-singular terminal sliding mode control of electronic throttle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(7): 2127-2135. |
| [6] | Guo-yuan QI,Kuo LI,Kun WANG. Attitude constrained control of quadrotor unmanned aerial vehicle based on compensation function observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 853-862. |
| [7] | Hong-yan GUO,Wen-ya YU,Jun LIU,Qi-kun DAI. Integrated moving horizon decision⁃making method for lane and speed of intelligent vehicle in complex scenarios [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 693-703. |
| [8] | De-jun WANG,Kai-ran ZHANG,Peng XU,Tian-biao GU,Wen-ya YU. Speed planning and control under complex road conditions based on vehicle executive capability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 643-652. |
| [9] | Zhuo-jun XU,Yao-xiang WANG,Xing HUANG,Cheng PENG. Ground moving target search and location with multi⁃unmanned aerial vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 832-840. |
| [10] | De-feng HE,Dan ZHOU,Jie LUO. Efficient cooperative predictive control of predecessor⁃following vehicle platoons with guaranteed string stability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 726-734. |
| [11] | Guo-yuan QI,Hao CHEN. Observer⁃based control⁃anti⁃disturbance⁃obstacle avoidance of quadrotor unmanned aerial vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 810-822. |
| [12] | Long-long CHEN,Tian-yu FENG,Zong-yang LYU,Yu-hu WU. Finite⁃time sliding mode attitude control for coaxial tilt⁃rotor unmanned aerial vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 883-890. |
| [13] | Yan MA,Ze-xuan GUO. SoE estimation of lithium-ion batteries based on improved BPNN-MPF algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(1): 263-272. |
| [14] | Hong-zhi WANG,Ting-ting WANG,Huang-shui HU,Xiao-fan LU. PID control based on BP neural network optimized by Q⁃learning for speed control of BLDCM [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2280-2286. |
| [15] | Jian-xin FENG,Qiang WANG,Ya-lei WANG,Biao XU. Fuzzy PID control of ultrasonic motor based on improved quantum genetic algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1990-1996. |
|
||