吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (2): 356-364.doi: 10.13229/j.cnki.jdxbgxb.20221184
• 车辆工程·机械工程 • 上一篇
新型巡检机器人移动底盘设计及越障性能分析
聂建军1( ),侯军凯1,解晓琳2,鄢鸿桢1
),侯军凯1,解晓琳2,鄢鸿桢1
- 1.中原工学院 机电学院,郑州 450007
2.河南科技大学 农业装备工程学院,河南 洛阳 471003
Design and obstacle surmounting performance analysis of a novel mobile chassis for inspection robot
Jian-jun NIE1(),Jun-kai HOU1,Xiao-lin XIE2,Hong-zhen YAN1
- 1.School of Mechatronics Engineering,Zhongyuan University of Technology,Zhengzhou 450007,China
2.College of Agricultural Equipment Engineering,Henan University of Science and Technology,Luoyang 471003,China
摘要:
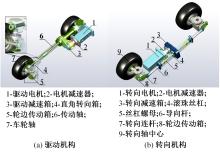
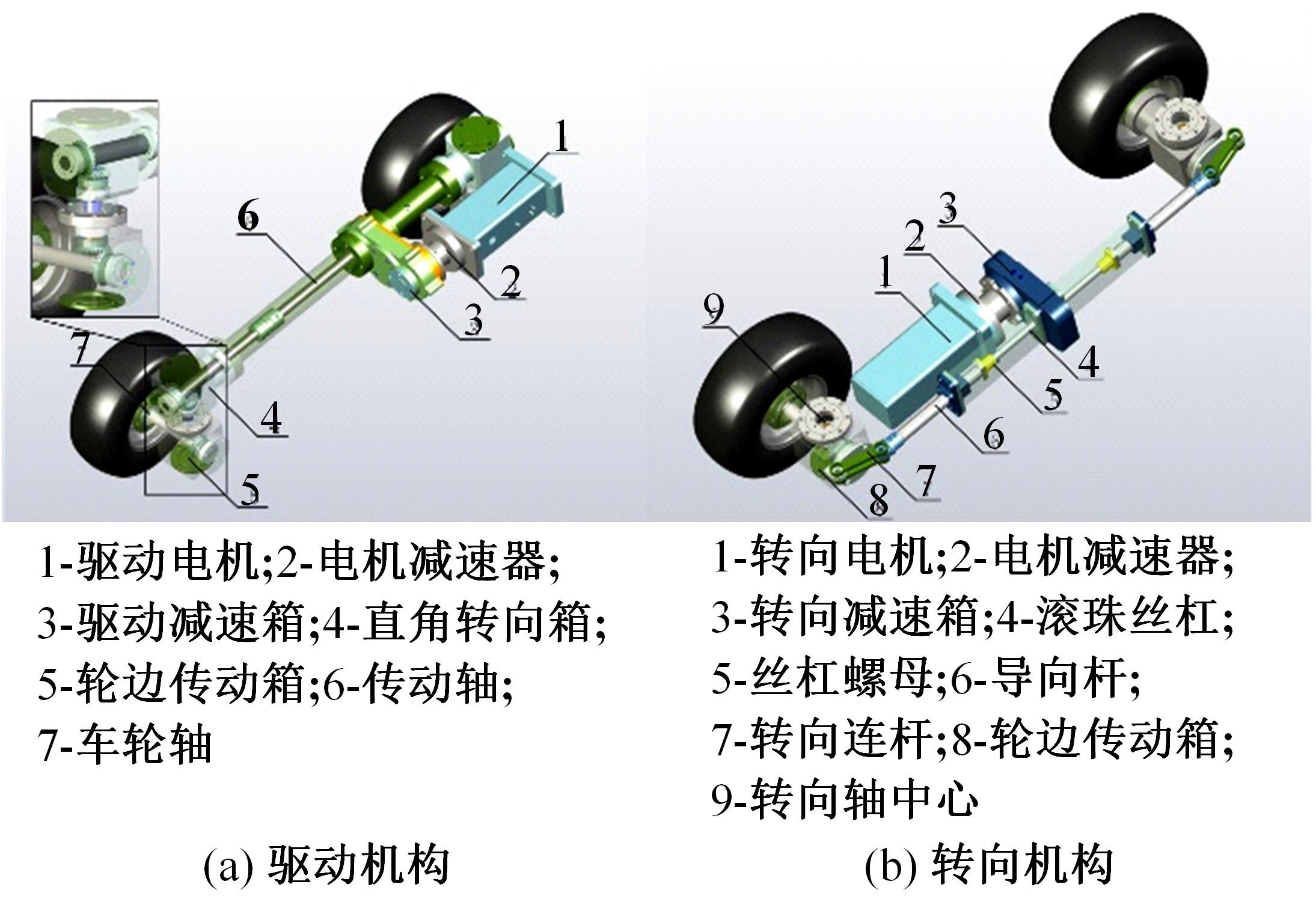
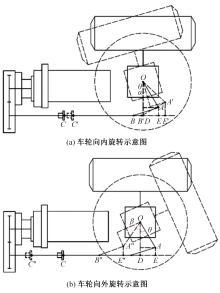
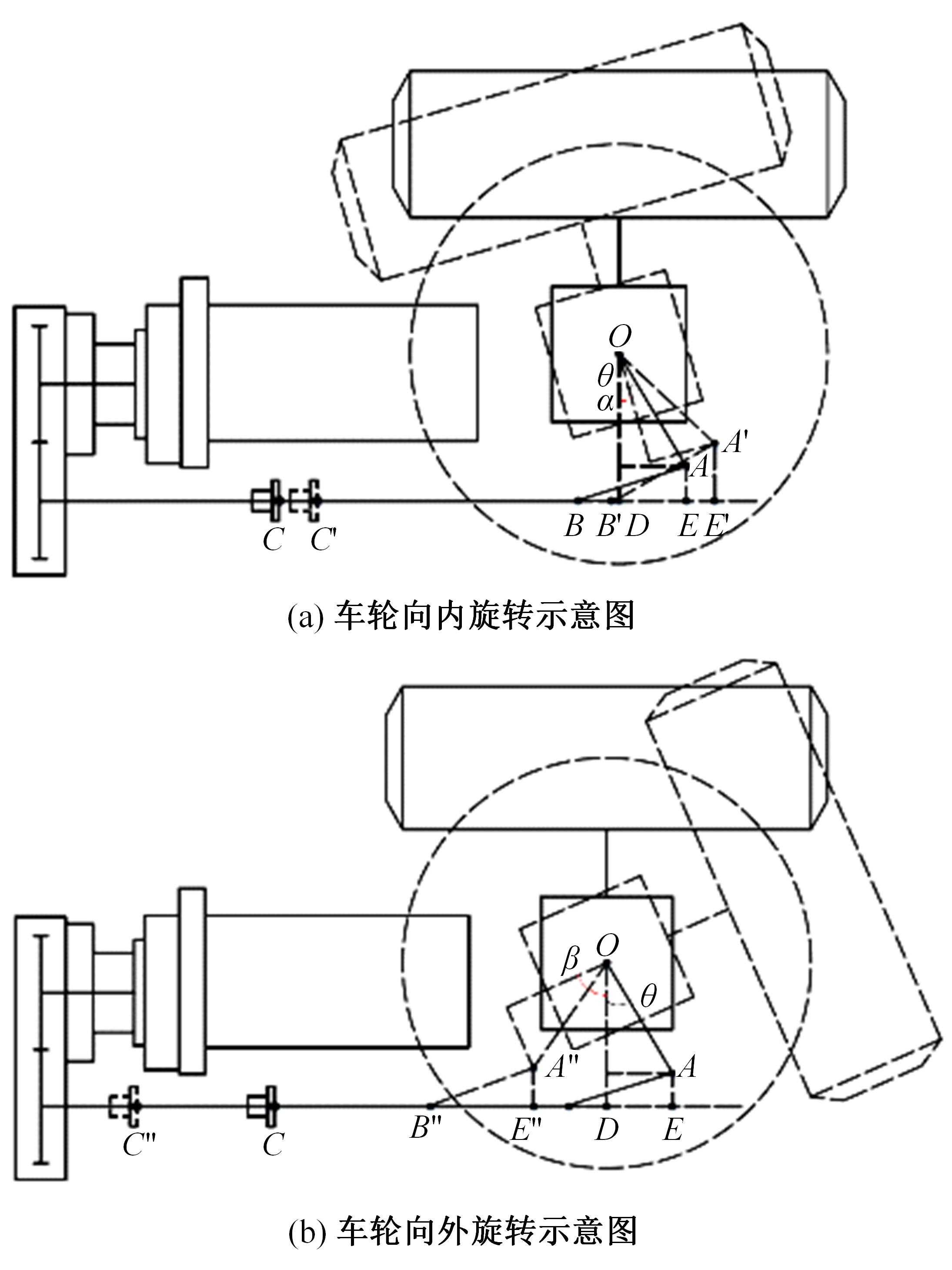
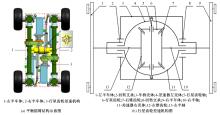
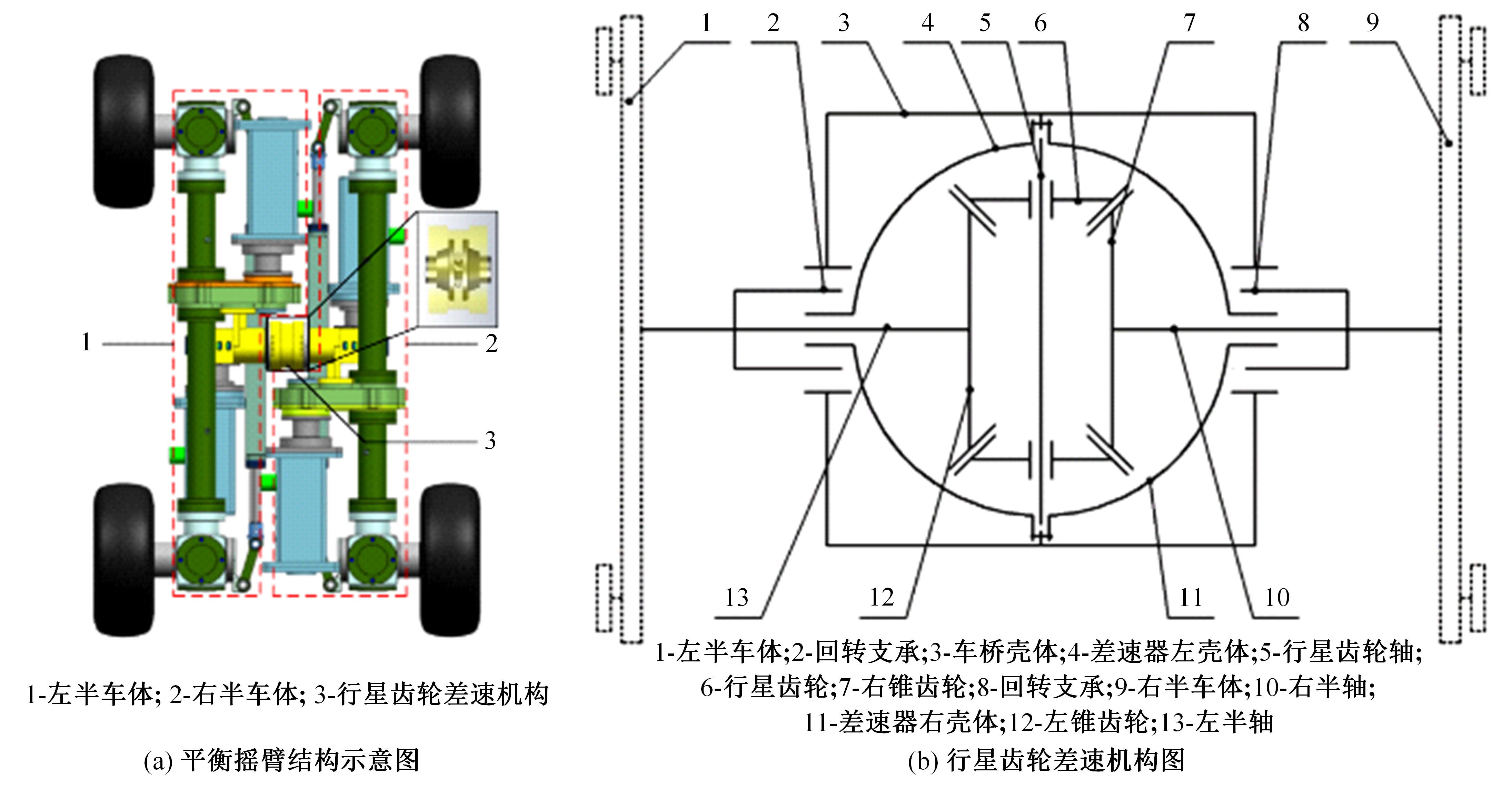
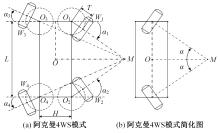
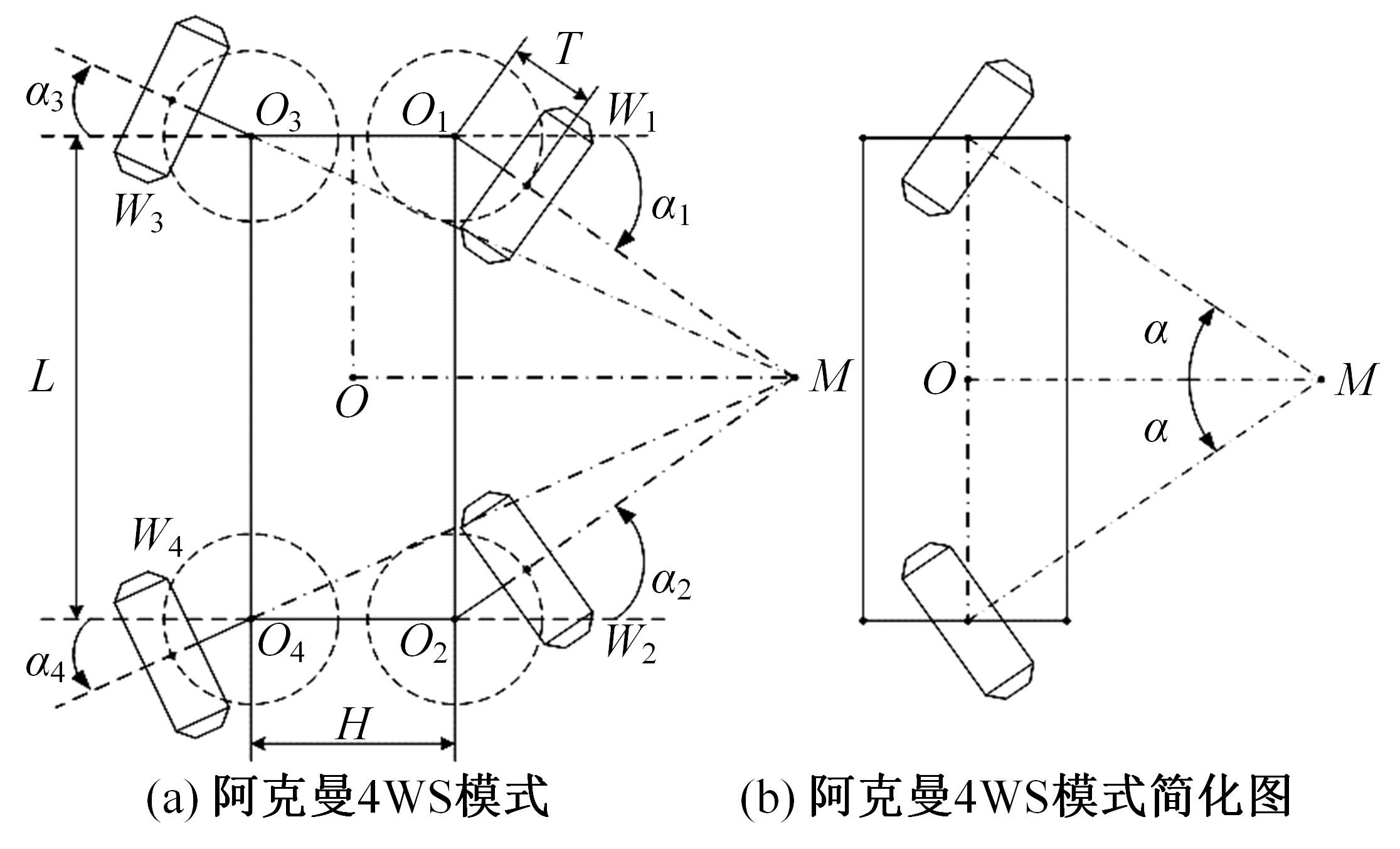
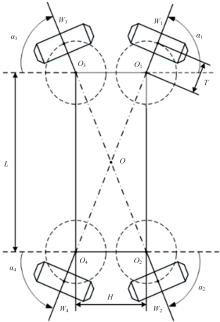
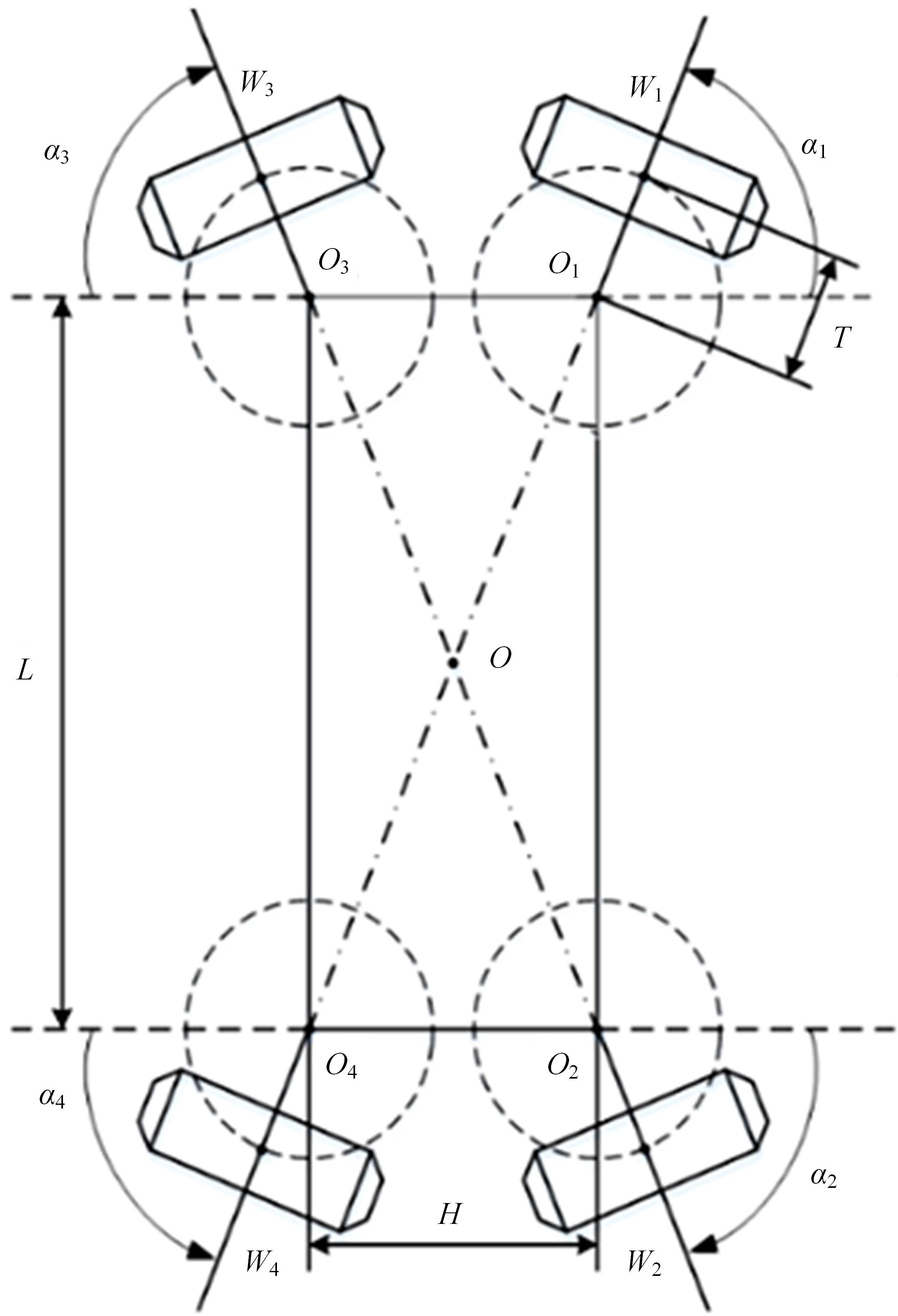
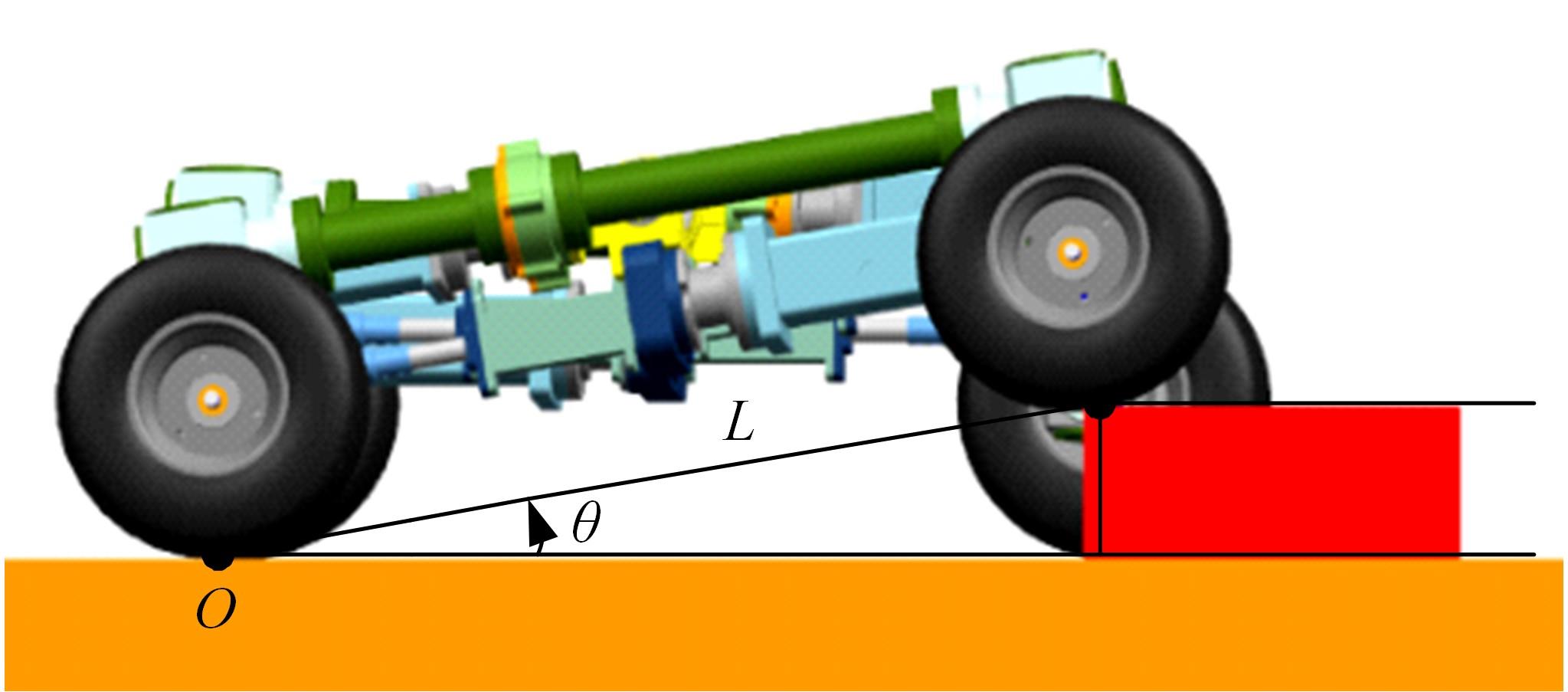
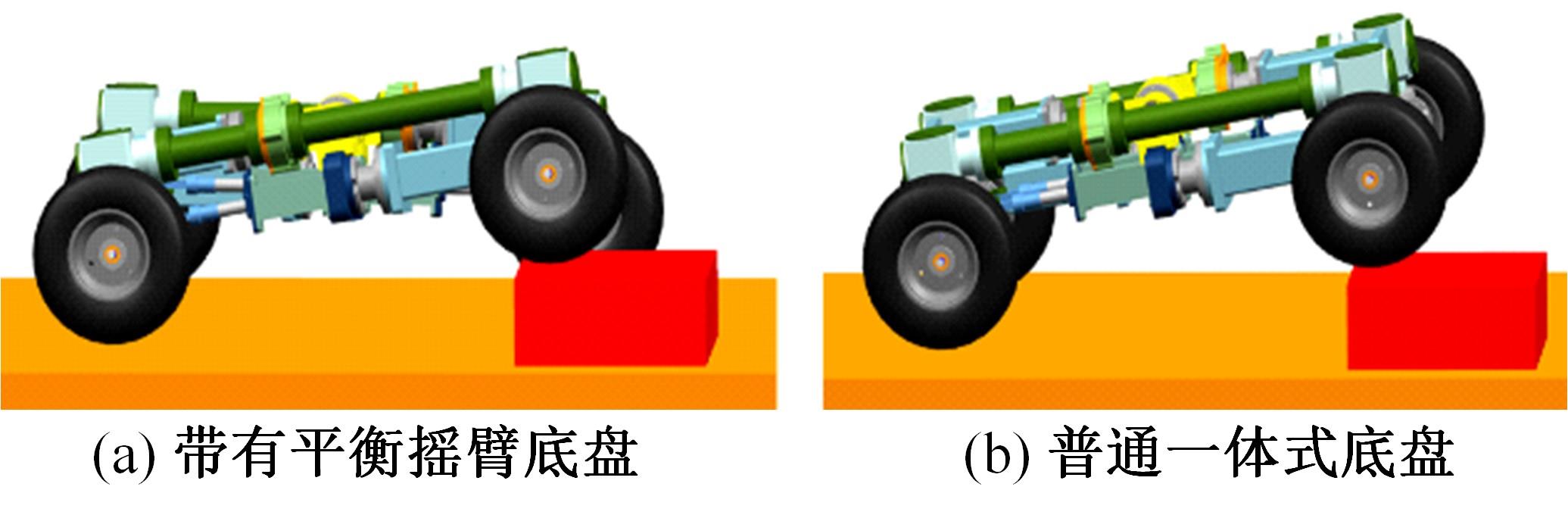
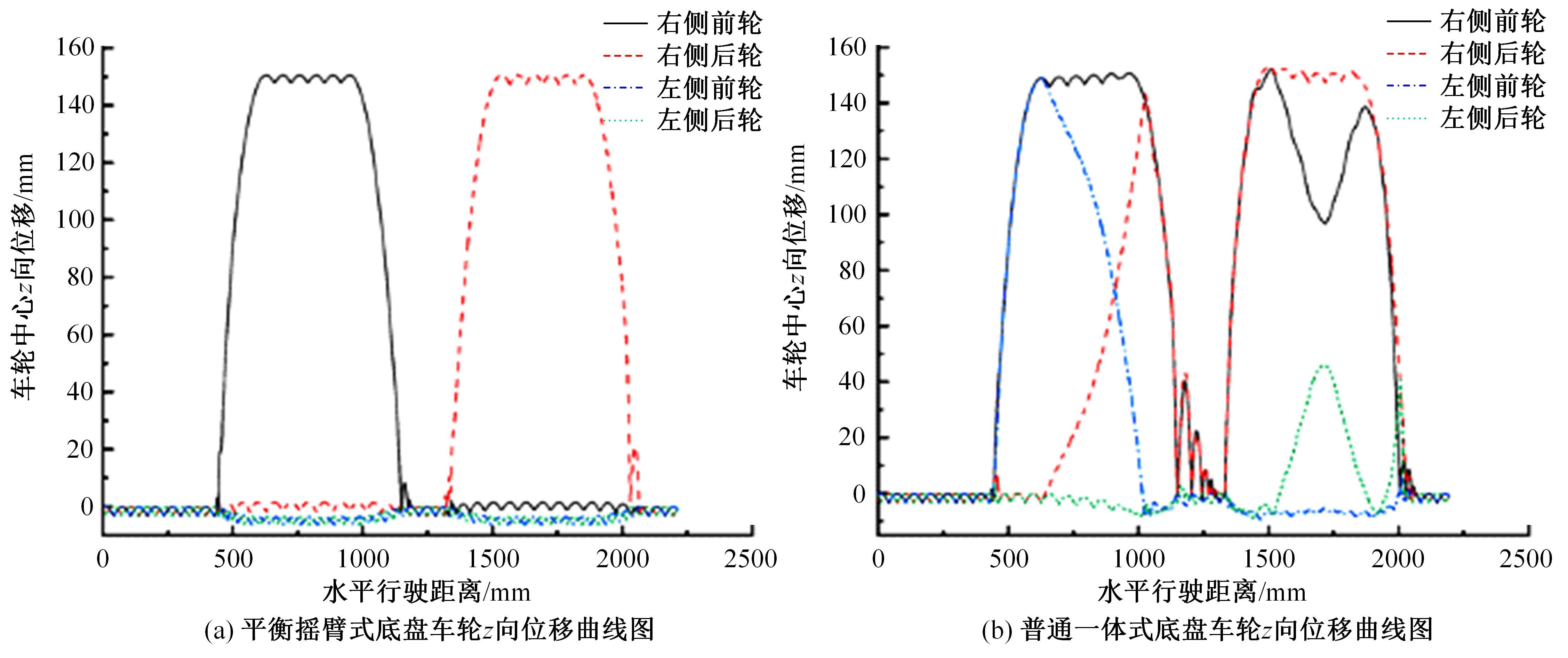
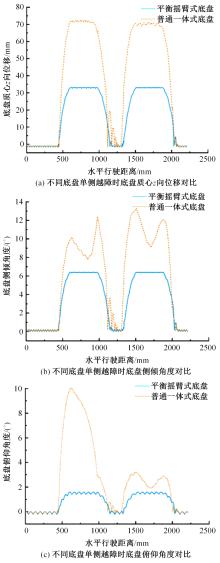
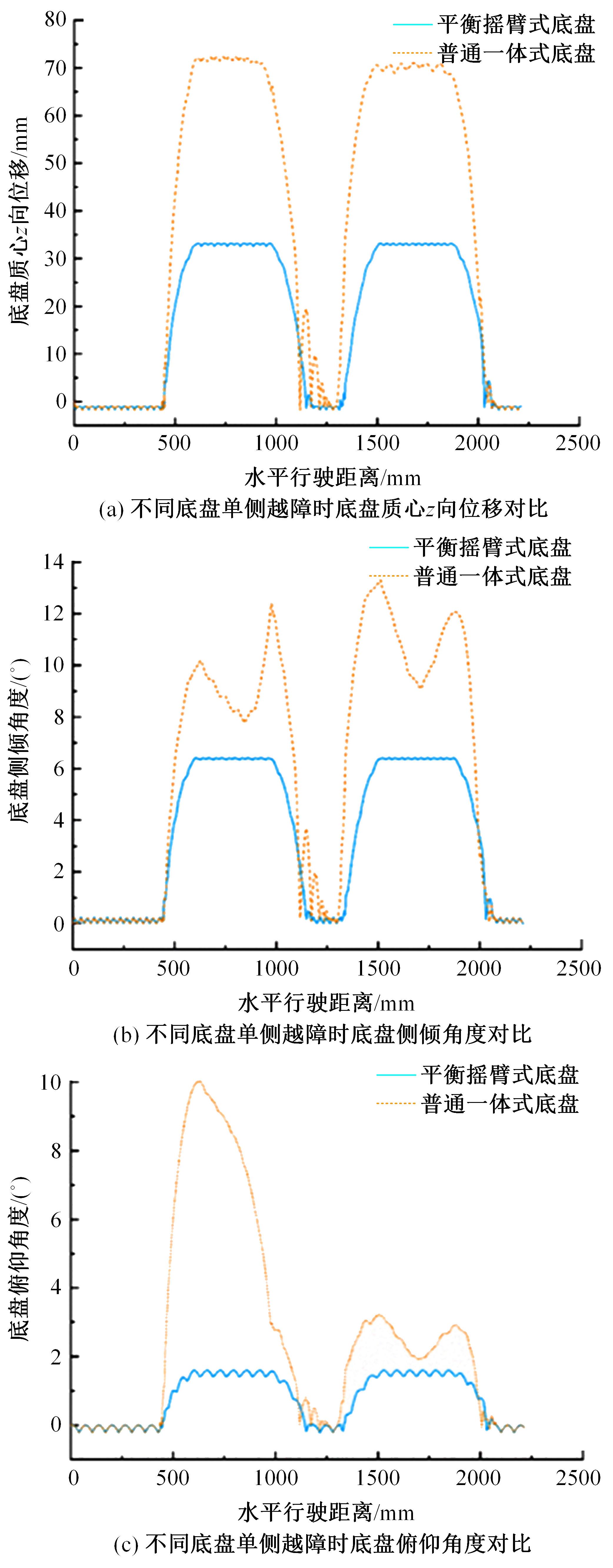
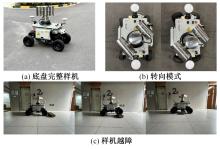
针对石化行业户外巡检工作设计了一款带有新型H型平衡摇臂机构的路面自适应巡检机器人移动底盘,该底盘采用新型“4h”对称结构实现底盘的四轮驱动和转向操作。在介绍底盘总体结构的基础上,分析了底盘驱动机构和转向机构的设计原理,建立了底盘阿克曼4WS转向和原地转向的理论模型,为机器人底盘运动控制提供了理论依据。对机器人底盘的单侧越障过程进行理论分析和仿真,并与普通一体式底盘越障过程进行仿真对比,研究了越障过程中底盘的行驶稳定性。最后,进行了底盘样机的转向模式实验和单侧越障实验,结果表明:该移动底盘能实现驱动和转向模式的切换,在进行单侧越障时底盘运动姿态平稳,具有良好的路面自适应能力和越障性能。
中图分类号:
- TP242.2



| 1 | 王燕, 索寒生, 贾贵金. 石化危险事故搜救移动机器人SLAM问题研究[J]. 控制工程, 2018, 25(2): 346-351. |
| Wang Yan, Suo Han-sheng, Jia Gui-jin. Research on SLAM problem of search and rescue mobile robot for petrochemical dangerous accidents[J]. Control Engineering, 2018, 25(2): 346-351. | |
| 2 | 李军伟, 朱宇昌, 张树生, 等. 输油场站巡检机器人系统及软件设计[J]. 制造业自动化, 2019, 41(2): 97-100. |
| Li Jun-wei, Zhu Yu-chang, Zhang Shu-sheng, et al. Robot system and software design for oil station inspection[J]. Manufacturing Automation, 2019, 41(2): 97-100. | |
| 3 | 童枭军, 陈洋, 路浩, 等. 面向表计读数的变电站巡检机器人路径规划[J]. 电子测量与仪器学报, 2022, 36(8): 167-177. |
| Tong Xiao-jun, Chen Yang, Lu Hao, et al. Path planning of substation inspection robot for meter reading[J]. Journal of Electronic Measurement and Instruments, 2022, 36(8): 167-177. | |
| 4 | Xiao Y, Yan Y, Yu Y S, et al. Research on pose adaptive correction method of indoor rail mounted inspection robot in GIS Substation[J]. Energy Reports, 2022, 8(6): 696-705. |
| 5 | 鲁守银, 张营, 李建祥, 等. 移动机器人在高压变电站中的应用[J]. 高电压技术, 2017, 43(1): 276-284. |
| Lu Shou-yin, Zhang Ying, Li Jian-xiang, et al. Application of mobile robots in high-voltage substations[J]. High Voltage Technology, 2017, 43(1): 276-284. | |
| 6 | 汪鹏. 变电站巡检机器人系统结构设计与控制研究[D].合肥: 安徽大学电气工程与自动化学院, 2020. |
| Wang Peng. Research on structure design and control of substation inspection robot system[D]. Hefei: School of Electrical Engineering and Automation, Anhui University, 2020. | |
| 7 | 李战东, 陶建国, 罗阳, 等. 核电水池推力附着机器人系统设计[J]. 吉林大学学报: 工学版, 2018, 48(6): 1820-1826. |
| Li Zhan-dong, Tao Jian-guo, Luo Yang, et al. Design of a nuclear power pool thrust-attached robot system[J]. Journal of Jilin University (Engineering and Technology Edition), 2018, 48(6): 1820-1826. | |
| 8 | Jing G Q, Qin X Y, Wang H Y, et al. Developments, challenges, and perspectives of railway inspection robots[J]. Automation in Construction, 2022, 138: 104242-104266. |
| 9 | 杨智勇, 吴功平, 王伟, 等. 高压巡检机器人下坡节能控速方法[J]. 吉林大学学报: 工学版, 2017, 47(2): 567-576. |
| Yang Zhi-yong, Wu Gong-ping, Wang Wei, et al. Downhill energy saving speed control method for high voltage inspection robot[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(2): 567-576. | |
| 10 | 房立金, 祝帅, 贺长林, 等. 新型四臂巡检机器人结构设计及转向越障研究[J]. 东北大学学报: 自然科学版, 2019, 40(6): 825-830. |
| Fang Li-jin, Zhu Shuai, He Chang-lin, et al. Structural design of a new type of four-arm inspection robot and research on steering obstacle clearance[J]. Journal of Northeastern University (Natural Science Edition), 2019, 40(6): 825-830. | |
| 11 | 裴文良, 张树生, 李军伟. 矿用巡检机器人设计及其应用[J]. 制造业自动化, 2017, 39(2): 73-74. |
| Pei Wen-liang, Zhang Shu-sheng, Li Jun-wei. Design and application of mine inspection robot[J]. Manufacturing Automation, 2017, 39(2): 73-74. | |
| 12 | 王成军, 王智慧. 井下巡检机器人浮动式移动底盘设计与分析[J]. 机床与液压, 2022, 50(15): 25-30. |
| Wang Cheng-jun, Wang Zhi-hui. Design and analysis of floating mobile chassis of underground inspection robot[J]. Machine Tools and Hydraulics, 2022, 50(15): 25-30. | |
| 13 | 阴贺生, 张秋菊, 宁萌. 轮腿复合式变位越障机器人结构构型与典型运动过程分析[J]. 机械传动, 2017, 41(12): 1-6. |
| Yin He-sheng, Zhang Qiu-ju, Ning Meng. Structural configuration and typical motion process analysis of wheel-leg compound displacement obstacle crossing robot [J]. Mechanical Transmission, 2017, 41(12): 1-6. | |
| 14 | 李荣, 栾贻青, 王海鹏, 等. 全向四驱变电站巡检机器人运动控制系统设计[J]. 机床与液压, 2020, 48(8): 112-116. |
| Li Rong, Luan Yi-qing, Wang Hai-peng, et al. Design of motion control system for omnidirectional four-wheel drive substation inspection robot[J]. Machine Tool and Hydraulics, 2020, 48(8): 112-116. | |
| 15 | 芮宏斌, 张森, 闫修鹏, 等. 全轮转向移动底盘设计及运动控制研究[J]. 机械科学与技术, 2022, 41(9): 1352-1361. |
| Rui Hong-bin, Zhang Sen, Yan Xiu-peng, et al. Research on design and motion control of all-wheel steering mobile chassis[J]. Mechanical Science and Technology, 2022, 41(9): 1352-1361. | |
| 16 | 姜涛, 葛少伟, 李德泉, 等. 电缆隧道巡检机器人行走机构的仿真研究[J]. 自动化与仪器仪表, 2018(12): 68-71. |
| Jiang Tao, Ge Shao-wei, Li De-quan, et al. Simulation research on the walking mechanism of the cable tunnel inspection robot[J]. Automation and Instrumentation, 2018(12): 68-71. | |
| 17 | 王鹏, 聂建军, 解晓琳, 等. 纯滚动轮式移动机器人设计及运动控制研究[J]. 机械传动, 2022, 46(8): 85-92. |
| Wang Peng, Nie Jian-jun, Xie Xiao-lin, et al. Research on the design and motion control of a pure rolling wheeled mobile robot[J]. Mechanical Transmission, 2022, 46(8): 85-92. |
| [1] | 邓小林,杨馥模,覃善甘. 新型仿竹六边形梯度层级多胞管耐撞性对比分析[J]. 吉林大学学报(工学版), 2024, 54(2): 333-345. |
| [2] | 王毅刚,王玉鹏,张昊,赵思安. 高速列车转向架区域气动噪声源识别与分析[J]. 吉林大学学报(工学版), 2024, 54(2): 346-355. |
| [3] | 李旭东,王新宇,田程,张新峰,牛治慧,赵志强. 基于用户关联的车辆耐久性载荷谱编制[J]. 吉林大学学报(工学版), 2024, 54(1): 66-75. |
| [4] | 王铁,李旭东,田程,赵宏伟. 基于多轴载荷投影构建轮辋双轴疲劳损伤模型[J]. 吉林大学学报(工学版), 2024, 54(1): 99-104. |
| [5] | 吴骁,史文库,郭年程,赵燕燕,陈志勇,李鑫鹏,孙卓,刘健. 基于Ease off的准双曲面齿轮多目标优化[J]. 吉林大学学报(工学版), 2024, 54(1): 76-85. |
| [6] | 陈兆玮,蒲前华. 弹性车轮对大跨斜拉桥车桥耦合振动的抑制特性[J]. 吉林大学学报(工学版), 2023, 53(9): 2519-2532. |
| [7] | 刘平义,李晓婷,高偌霖,李海涛,魏文军,王亚. 车辆侧倾驱动机构设计与试验[J]. 吉林大学学报(工学版), 2023, 53(8): 2185-2192. |
| [8] | 黄学劲,钟锦星,路京雨,赵霁,肖伟,袁新枚. 基于用户画像的电动汽车充电负荷预测方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2193-2200. |
| [9] | 张树培,夏明悦,张玮,陈钊,陈义祥. 考虑非线性刚度的间隙球铰碰撞动力学建模与仿真[J]. 吉林大学学报(工学版), 2023, 53(8): 2227-2235. |
| [10] | 陈辉,邵亚军. 基于惯性基准多传感器耦合的路面谱测量方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2254-2262. |
| [11] | 陈磊,王杨,董志圣,宋亚奇. 一种基于转向意图的车辆敏捷性控制策略[J]. 吉林大学学报(工学版), 2023, 53(5): 1257-1263. |
| [12] | 陈鑫,张冠宸,赵康明,王佳宁,杨立飞,司徒德蓉. 搭接焊缝对铝合金焊接结构轻量化设计的影响[J]. 吉林大学学报(工学版), 2023, 53(5): 1282-1288. |
| [13] | 张勇,毛凤朝,刘水长,王青妤,潘神功,曾广胜. 基于Laplacian算法的汽车外流场畸变网格优化[J]. 吉林大学学报(工学版), 2023, 53(5): 1289-1296. |
| [14] | 汪少华,储堃,施德华,殷春芳,李春. 基于有限时间扩张状态观测的HEV鲁棒复合协调控制[J]. 吉林大学学报(工学版), 2023, 53(5): 1272-1281. |
| [15] | 于贵申,陈鑫,武子涛,陈轶雄,张冠宸. AA6061⁃T6铝薄板无针搅拌摩擦点焊接头结构及性能分析[J]. 吉林大学学报(工学版), 2023, 53(5): 1338-1344. |
|
||