吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (11): 3583-3592.doi: 10.13229/j.cnki.jdxbgxb.20240144
• 交通运输工程·土木工程 • 上一篇
智能网联环境下高速公路异质交通流建模及仿真
程国柱( ),陈永胜
),陈永胜
- 东北林业大学 土木与交通学院,哈尔滨 150040
Modeling and simulation of freeway heterogeneous traffic flow in connected and autonomous vehicle environment
Guo-zhu CHENG(),Yong-sheng CHEN
- School of Civil Engineering and Transportation,Northeast Forestry University,Harbin 150040,China
摘要:
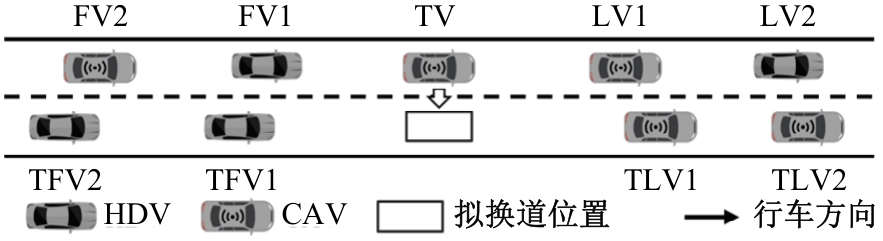
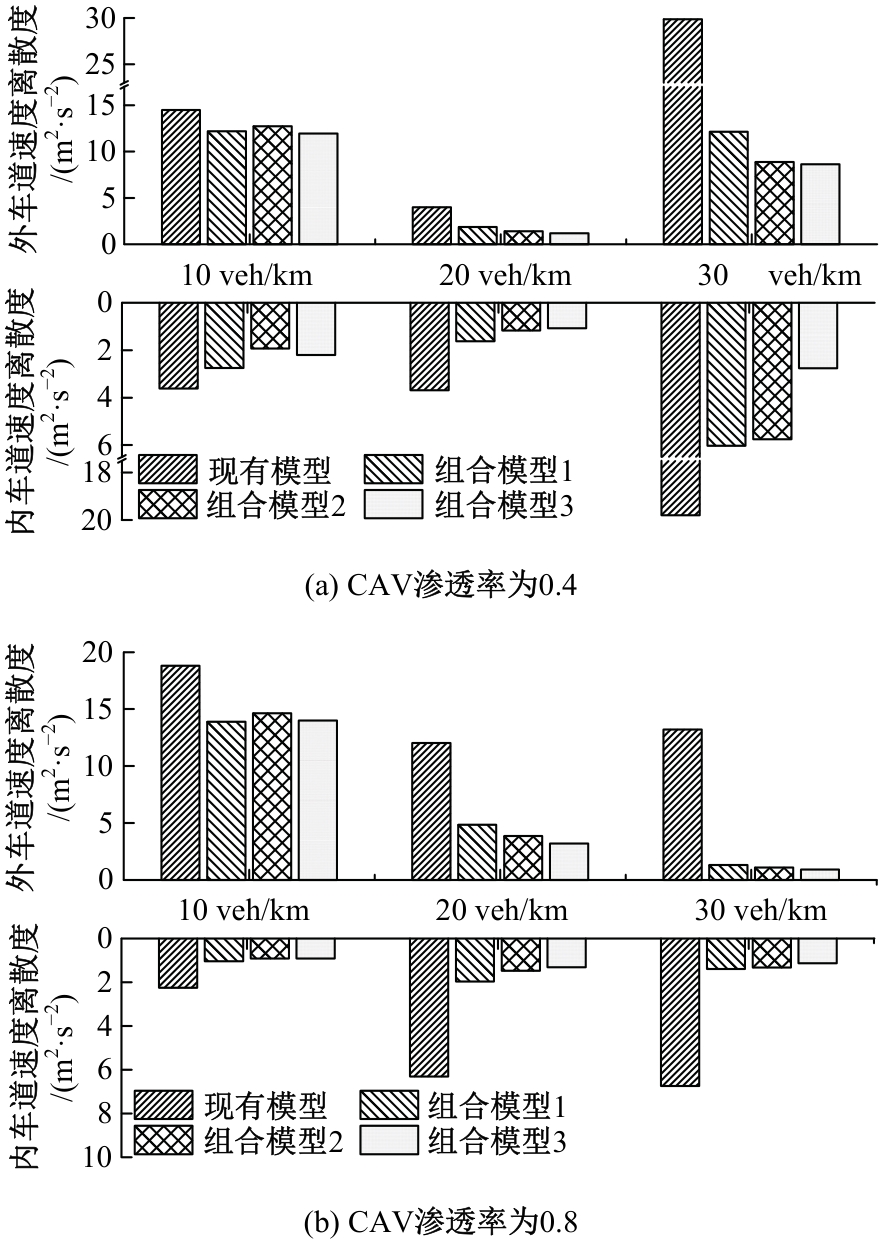
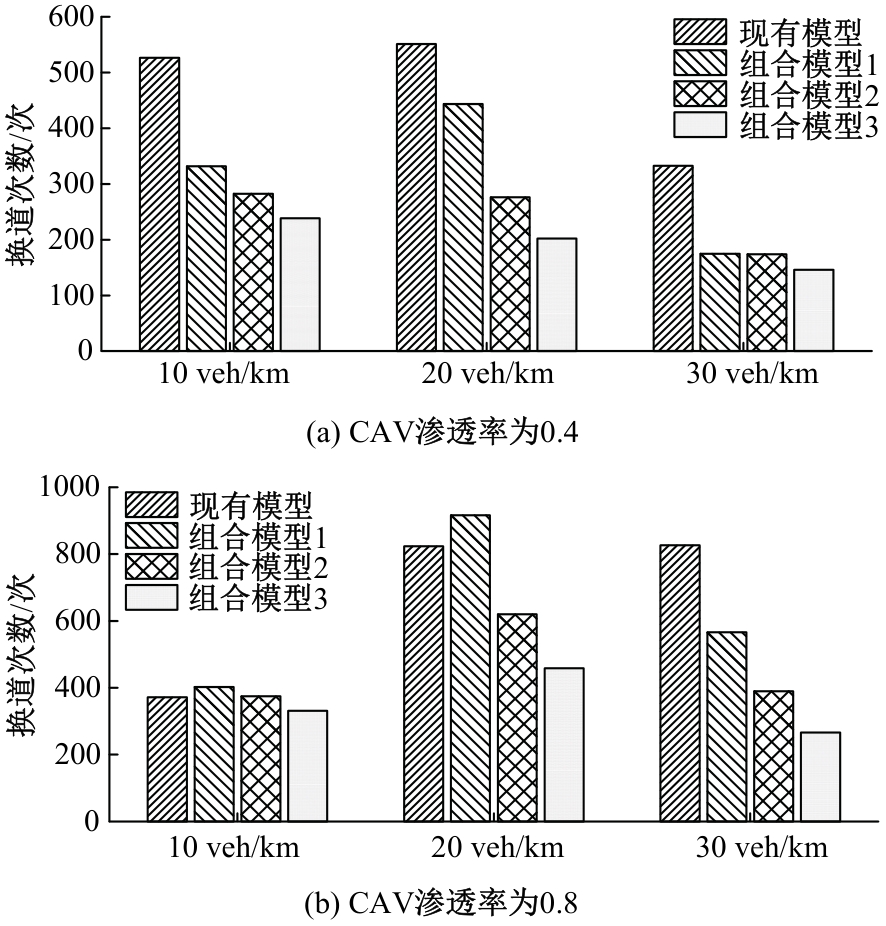
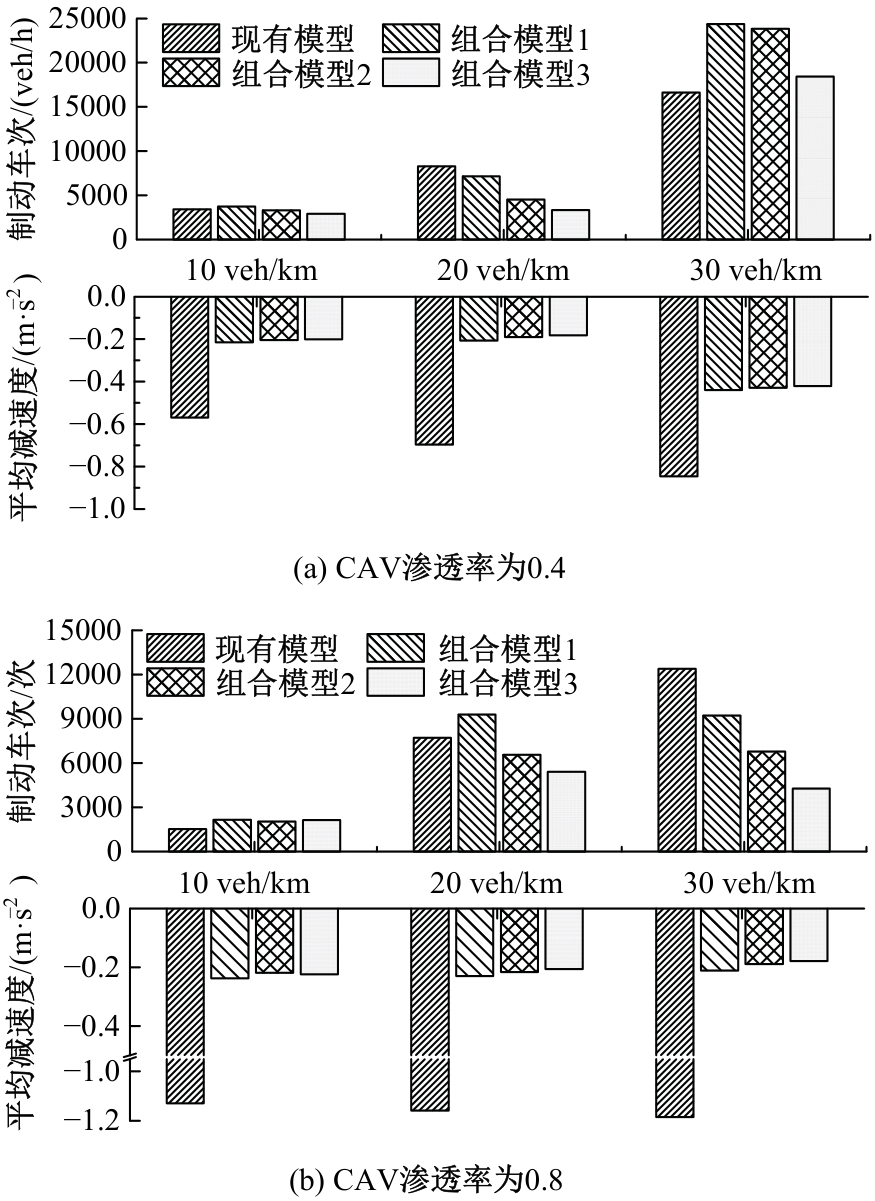
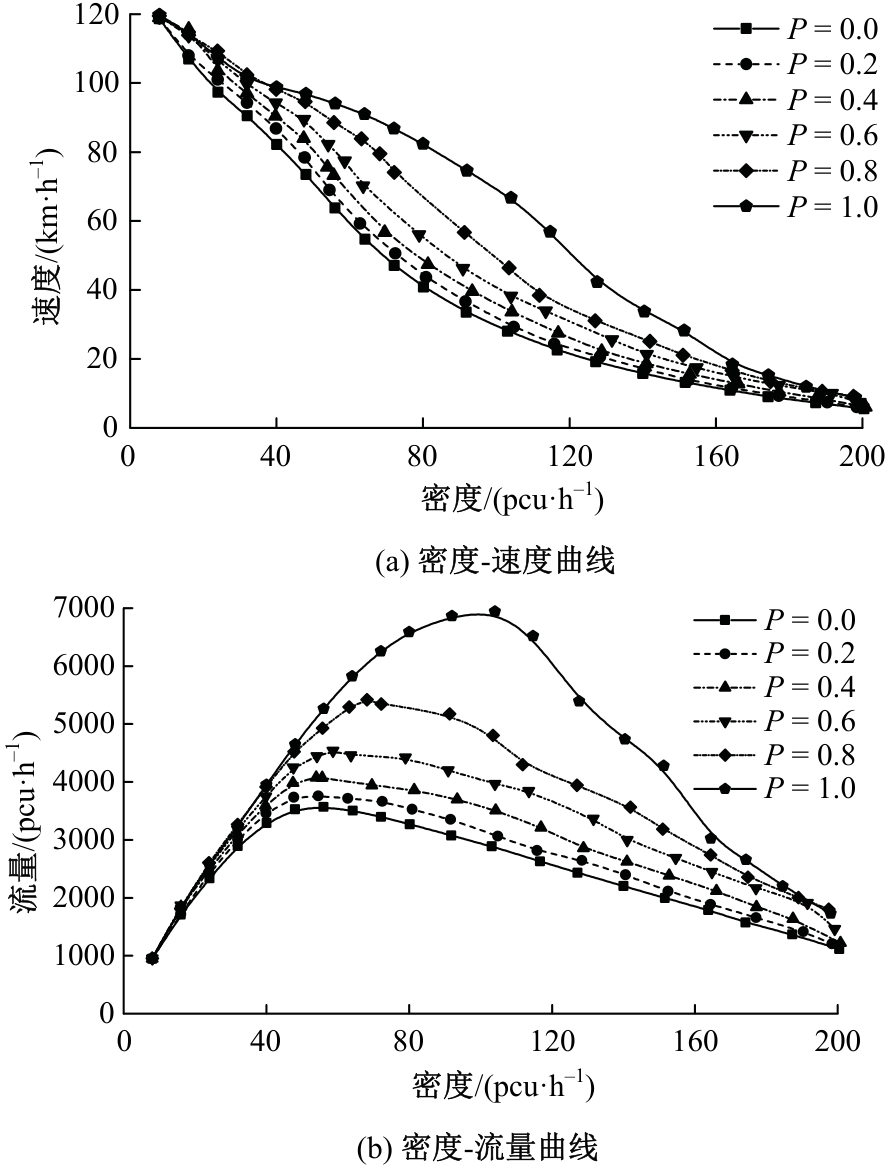
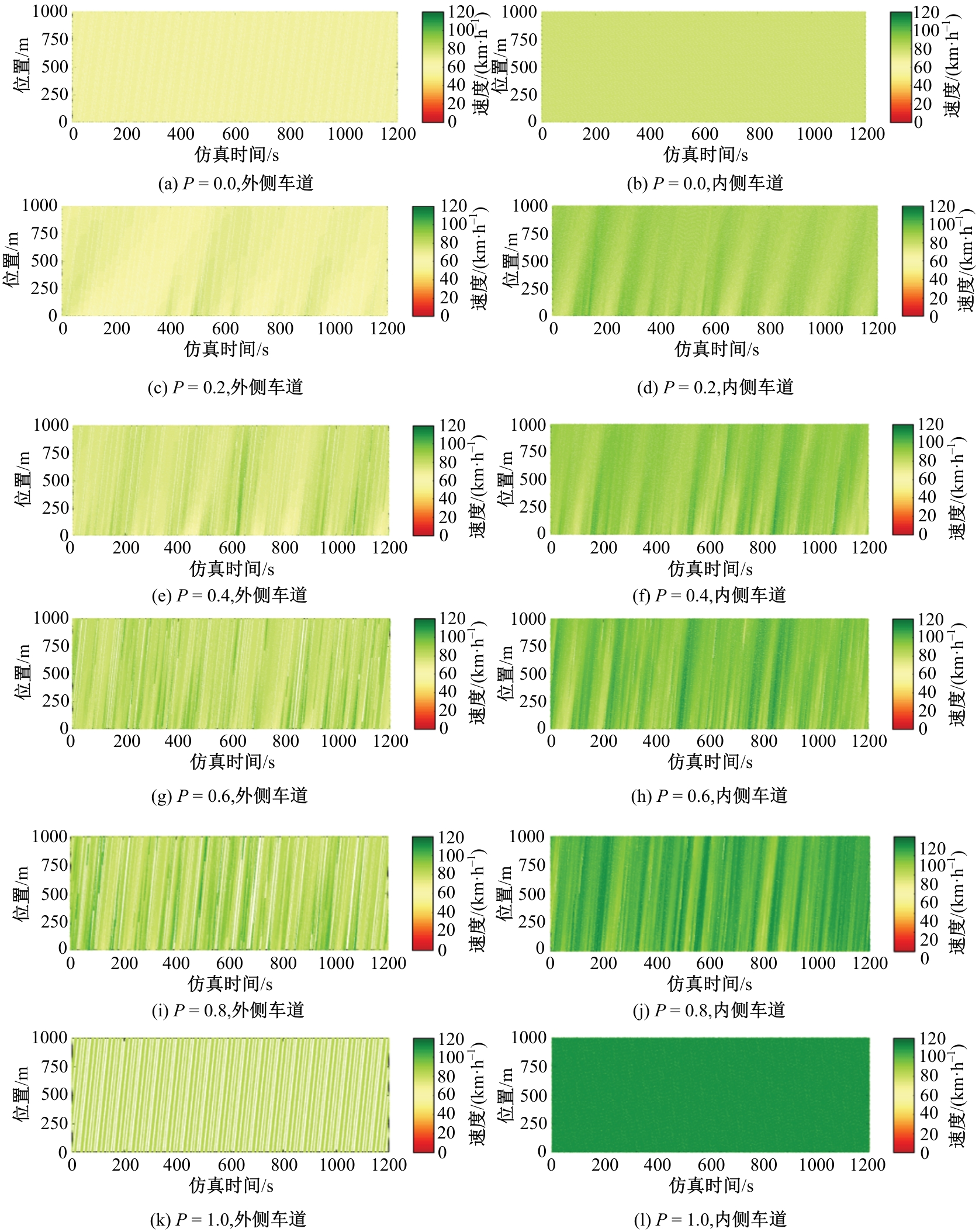
为探究人工驾驶车辆(HDV)与智能网联车辆(CAV)混合行驶对交通流产生的影响,建立了高速公路异质交通流模型。采用增强型智能驾驶人模型(EIDM)描述HDV跟驰行为,并考虑前方多车的车头间距、速度差、加速度等因素,改进EIDM模型描述CAV跟驰行为;然后利用最小化由换道引起的所有制动(MOBIL)模型描述HDV换道行为,并引入博弈理论,考虑多车竞争与协作关系,构建CAV自主换道与协同换道模型;通过仿真实验评价所建模型合理性,并分析异质交通流运行特征。研究表明:与现有模型相比,本文所建模型在交通流稳定性及行车舒适性等方面具有显著优势;CAV渗透率的提高有利于通行能力的提升,尤其CAV渗透率大于0.4时效果更为显著。
中图分类号:
- U495












| [1] | Shladover S E, Nowakowski C, Lu X Y, et al. Cooperative adaptive cruise control: definitions and operating concepts[J]. Transportation Research Record: Journal of the Transportation Research Board, 2016, 2489(1): 145-152. |
| [2] | 贺正冰. 微观交通模型: 智能网联化转型与通用驾驶人模型框架[J]. 交通运输工程与信息学报, 2022, 20(2): 1-13. |
| He Zheng-bing. Microscopic traffic models: transformation in connected environment and generalized driver model[J]. Journal of Transportation Engineering and Information, 2022, 20(2): 1-13. | |
| [3] | Shladover S E, Su D Y, Lu X Y. Impacts of cooperative adaptive cruise control on freeway traffic flow[J]. Transportation Research Record: Journal of the Transportation Research Board, 2012, 2324(1): 63-70. |
| [4] | Milanes V, Shladover S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48(1): 285-300. |
| [5] | Talebpour A, Mahmassani H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput[J]. Transportation Research Part C: Emerging Technologies, 2016, 71(1): 143-163. |
| [6] | Cui S, Cao F, Yu B, et al. Modeling heterogeneous traffic mixing regular, connected, and connected-autonomous vehicles under connected environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 99: 1-19. |
| [7] | 秦严严, 唐鸿辉, 杨金滢, 等. 混有网联车队的道路通行能力分析[J]. 北京交通大学学报, 2022, 46(1): 79-87. |
| Qin Yan-yan, Tang Hong-hui, Yang Jin-ying, et al. Analysis on road capacity of connected vehicle platoon on mixed traffic flow[J]. Journal of Beijing Jiaotong University, 2022, 46(1): 79-87. | |
| [8] | 秦严严, 胡兴华, 李淑庆, 等. 智能网联环境下混合交通流稳定性解析[J]. 哈尔滨工业大学学报, 2021, 53(3): 152-157. |
| Qin Yan-yan, Hu Xing-hua, Li Shu-qing, et al. Stability analysis of mixed traffic flow in connected and autonomous environment[J]. Journal of Harbin Institute of Technology, 2021, 53(3): 152-157. | |
| [9] | 马庆禄, 傅宝宇, 曾皓威. 智能网联环境下异质交通流基本图和稳定性分析[J]. 交通信息与安全, 2021, 39(5): 76-84. |
| Ma Qing-lu, Fu Bao-yu, Zeng Hao-wei. Fundamental diagram and stability analysis of heterogeneous traffic flow in a connected and autonomous environment[J]. Journal of Transport Information and Safety, 2021, 39(5): 76-84. | |
| [10] | 李松, 张开碧, 李永福, 等. 理想诱导环境下的网联车与网联自动驾驶车混合交通流建模研究[J]. 交通运输工程与信息学报, 2023, 21(3): 31-58. |
| Li Song, Zhang Kai-bi, Li Yong-fu, et al. Modeling a mixed traffic flow of connected vehicles and connected autonomous vehicles in an ideal induction environment[J]. Journal of Transportation Engineering and Information, 2023, 21(3): 31-58. | |
| [11] | Yu Y, Liu S, Jin P J, et al. Multi-player dynamic game-based automatic lane-changing decision model under mixed autonomous vehicle and human-driven vehicle environment[J]. Transportation Research Record Journal of the Transportation Research Board, 2020, 2674(4): 1-19. |
| [12] | 曲大义, 黑凯先, 郭海兵, 等. 车联网环境下车辆换道博弈行为及模型[J]. 吉林大学学报: 工学版, 2022, 52(1): 101-109. |
| Qu Da-yi, Kai-xian Hei, Guo Hai-bing, et al. Game behavior and model of lane-changing on the internet of vehicles environment[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(1): 101-109. | |
| [13] | 吴德华, 彭锐, 陈荣峰. 异质流网联车的不同换道集聚策略[J]. 西南交通大学学报, 2023, 58(2): 348-356. |
| Wu De-hua, Peng Rui, Chen Rong-feng. Hybrid characteristics of heterogeneous traffic flow under different aggregating lane-change strategies in intelligent network[J]. Journal of Southwest Jiaotong University, 2023, 58(2): 348-356. | |
| [14] | 潘义勇, 王松. 网联自动驾驶环境下改进的加权MOBIL自主性换道决策模型[J]. 重庆交通大学学报: 自然科学版, 2021, 40(5): 46-52. |
| Pan Yi-yong, Wang Song. Improved weighted MOBIL decision model for autonomous lane change in networked autopilot environment[J]. Journal of Chongqing Jiaotong University (Natural Science), 2021, 40(5): 46-52. | |
| [15] | 孙曼曼, 陈珍萍, 李海峰, 等. 基于博弈论的网联自动驾驶车辆协同换道研究[J]. 计算机仿真, 2023, 40(1): 161-166. |
| Sun Man-man, Chen Zhen-ping, Li Hai-feng, et al. Research on cooperative lane change of networked autonomous vehicles based on game theory[J]. Computer Simulation, 2023, 40(1): 161-166. | |
| [16] | Ye L, Yamamoto T. Modeling connected and autonomous vehicles in heterogeneous traffic flow[J]. Physica A: Statistical Mechanics and its Applications, 2018, 490(1): 269-277. |
| [17] | Zhou Y J, Zhu H B, Guo M M, et al. Impact of CACC vehicles cooperative driving strategy on mixed four-lane highway traffic flow[J]. Physica A: Statistical Mechanics and its Applications, 2019, 540(1): 1-25. |
| [18] | 郭静秋, 方守恩, 曲小波, 等. 基于强化协作博弈方法的双车道混合交通流特性[J]. 同济大学学报: 自然科学版, 2019, 47(7): 976-983. |
| Guo Jing-qiu, Fang Shou-en, Qu Xiao-bo, et al. Characteristics of mixed traffic flow in two-lane scenario based on cooperative gaming method[J]. Journal of Tongji University (Natural Science), 2019, 47(7): 976-983. | |
| [19] | 梁军, 耿浩然, 陈龙, 等. 融入公交车与自动驾驶车队的异质交通流模型[J]. 西南交通大学学报, 2023, 58(5): 1090-1099. |
| Liang Jun, Geng Hao-ran, Chen Long, et al. Integrated heterogeneous traffic flow model of bus and autonomous vehicle platoon[J]. Journal of Southwest Jiaotong University, 2023, 58(5): 1090-1099. | |
| [20] | 单肖年, 万长薪, 李志斌, 等. 智能网联环境下多车道异质交通流建模与仿真[J]. 交通运输系统工程与信息, 2022, 22(6): 74-84. |
| Shan Xiao-nian, Wan Chang-xin, Li Zhi-bin, et al. Modeling and simulation of multi-lane heterogeneous traffic flow in intelligent and connected vehicle environment[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(6): 74-84. | |
| [21] | Treiber M, Hennecke A, Helbing D. Congested traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62(2): 1805-1824. |
| [22] | Kesting A, Treiber M, Helbing D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity[J]. Philosophical Transactions of the Royal Society A, 2010, 368(1928): 4585-4605. |
| [23] | Guériau M, Billot R, Faouzin E E, et al. How to assess the benefits of connected vehicles? A simulation framework for the design of cooperative traffic management strategies[J]. Transportation Research Part C: Emerging Technologies, 2016, 67(1): 266-279. |
| [24] | Kesting A, Treiber M, Helbing D. General lane-changing model MOBIL for car-following model[J]. Transportation Research Record, 2007, 1999(1): 86-94. |
| [25] | Nie J, Zhang J, Ding W, et al. Decentralized cooperative lane-changing decision-making for connected autonomous vehicles[J]. IEEE Access, 2017, 4(1): 9413-9420. |
| [26] | Gurupackiam S, Jones S L. Empirical study of lane changing in urban streets under varying traffic conditions[J]. Procedia-Social and Behavioral Sciences, 2011, 16: 259-269. |
| [1] | 马壮林,毕宇明,周备,邓亚娟,兆雪. 公交换乘优惠政策下居民换乘意向的异质性分析[J]. 吉林大学学报(工学版), 2026, 56(1): 158-169. |
| [2] | 曲昭伟,王铭阳,王喆,宋现敏,张云翔,黄镜尘. 基于自动驾驶模块化车辆主辅功能分配的公交自适应调度方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2946-2957. |
| [3] | 王琳虹,刘宇阳,刘子昱,鹿应佳,张宇恒,黄桂树. 基于YOLOv5的轻量化桥梁缺陷识别[J]. 吉林大学学报(工学版), 2025, 55(9): 2958-2968. |
| [4] | 张云翔,宋现敏,谢渝,湛天舒. 基于用户满意度的停车预约服务智能体行为仿真[J]. 吉林大学学报(工学版), 2025, 55(9): 2978-2984. |
| [5] | 穆长儒,徐亮,程国柱. 基于能量合理分配的外包U型钢-混凝土组合护栏防撞性能[J]. 吉林大学学报(工学版), 2025, 55(8): 2669-2680. |
| [6] | 李艳波,汪静远,陈圆媛,程绍峰,吕浩楠,陈俊硕. 面向高速公路服务区自洽能源系统的RAMS评价方法[J]. 吉林大学学报(工学版), 2025, 55(7): 2243-2250. |
| [7] | 戢晓峰,邓若凡,乔新,关昊天. 建成环境对共享单车时间集聚模式的非线性影响[J]. 吉林大学学报(工学版), 2025, 55(7): 2233-2242. |
| [8] | 于江波,翁剑成,林鹏飞,孙宇星,柴娇龙. 基于混合Transformer的对外客运枢纽抵站客流预测模型[J]. 吉林大学学报(工学版), 2025, 55(7): 2251-2259. |
| [9] | 柴树山,周志强,李海涛,徐炅旸. 基于图时空模式学习网络的路网实时交通事件自动检测方法[J]. 吉林大学学报(工学版), 2025, 55(7): 2145-2161. |
| [10] | 赵红专,吴泽健,张鑫,石胜文,李文勇,展新,许恩永,王佳明. 基于密度离散度和信息传输延迟的网联商用车弯道格子模型[J]. 吉林大学学报(工学版), 2025, 55(6): 2015-2029. |
| [11] | 闫晟煜,程铭杰,田宏策,王洪瑀,周永恒,马博浩. 封闭式景区纯电动客车调度方法[J]. 吉林大学学报(工学版), 2025, 55(6): 1984-1993. |
| [12] | 潘福全,牛远征,张丽霞,杨金顺,陈秀锋,陈德启. 智能网联环境下无信号交叉口车辆通行控制策略[J]. 吉林大学学报(工学版), 2025, 55(6): 1948-1962. |
| [13] | 潘义勇,徐家聪,尤逸文,全勇俊. 网约车出行需求影响因素多尺度空间异质性分析[J]. 吉林大学学报(工学版), 2025, 55(5): 1567-1575. |
| [14] | 秦严严,肖腾飞,罗钦中,王宝杰. 雾天高速公路车辆跟驰安全分析与控制策略[J]. 吉林大学学报(工学版), 2025, 55(4): 1241-1249. |
| [15] | 张河山,范梦伟,谭鑫,郑展骥,寇立明,徐进. 基于改进YOLOX的无人机航拍图像密集小目标车辆检测[J]. 吉林大学学报(工学版), 2025, 55(4): 1307-1318. |
|
||