吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (5): 1547-1557.doi: 10.13229/j.cnki.jdxbgxb20180507
• • 上一篇
仿真转台用连续回转电液伺服马达预测滑模控制
王晓晶( ),刘美珍,陈帅,李嵩
),刘美珍,陈帅,李嵩
- 哈尔滨理工大学 机械动力工程学院,哈尔滨 150080
Predictive function and sliding model controller of continuous rotary electro⁃hydraulic servo motor applied to simulator
Xiao-jing WANG(),Mei-zhen LIU,Shuai CHEN,Song LI
- School of Mechanical and Power Engineering, Harbin University of Science and Technology, Harbin 150080, China
摘要:
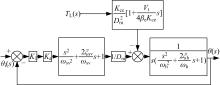
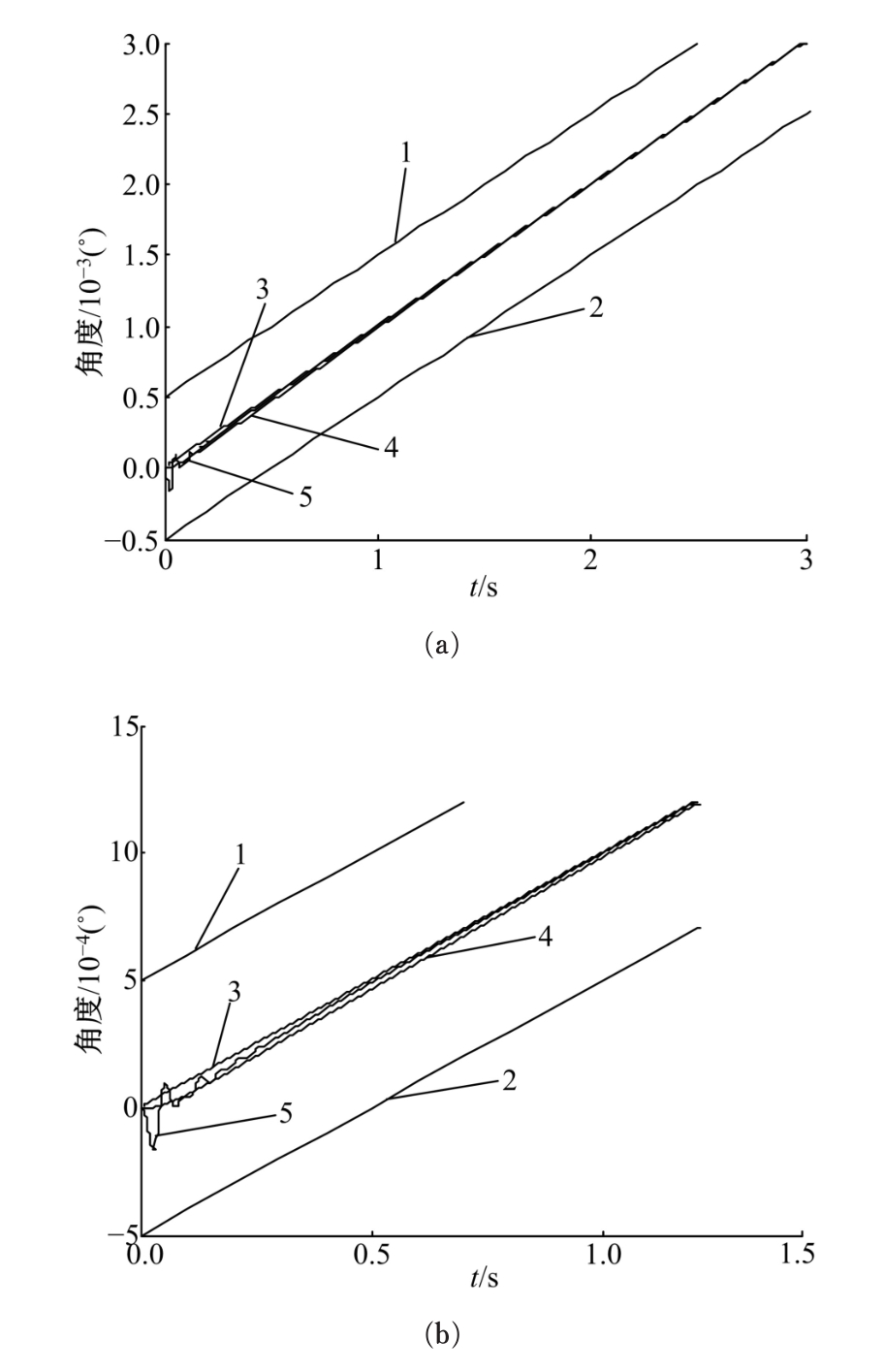
针对飞行仿真转台用连续回转电液伺服马达自身存在高度非线性和摩擦、泄漏等外界因素导致的不确定性,不能建立精确的数学模型,以及传统控制策略效果不理想等特点,提出了一种预测函数滑模变结构复合控制策略(PFC-SMC)。电液伺服系统采用了具有状态反馈形式的内模控制理论结构,将内模控制思想和滑模变结构控制思想相结合,利用滑模控制克服外界干扰和参数时变性,利用预测函数控制算法设计内模控制器,实现系统高精度、高频响的跟踪控制,有效抑制了由滑模控制引起的抖振现象。仿真表明:与传统PID控制相比,PFC-SMC复合控制算法有效提高了飞行仿真转台用电液伺服系统的低速稳定性和抗干扰能力,极大程度拓展了系统的频响,实现了伺服系统的精确控制。
中图分类号:
- TH137










| 1 | 徐东东, 孙志朋, 韩红斌, 等 . 大偏载情况下双马达同步驱动控制建模及研究实现[J]. 航空制造技术, 2015, 10(2): 86-89. |
| Xu Dong-dong , Sun Zhi-peng , Han Hong-bin , et al . Modeling and realization of dual-motor synchronization-control (DMSC) under large partial load[J]. Aircraft Manufacturing Technology, 2015, 10(2): 86-89. | |
| 2 | 单梅林 . 飞行仿真转台鲁棒完全跟踪控制器设计[J]. 哈尔滨工业大学学报, 2013, 7(12): 124-129. |
| Shan Mei-lin . Robust perfect tracking controller design for flight simulater[J]. Harbin Institute of Technology, 2013, 7(12): 124-129. | |
| 3 | 曹健, 李尚义, 马建设, 等 . 新型仿真转台用连续回转电液伺服马达[J]. 南京理工大学学报, 2001, 25(2): 152-155. |
| Cao Jian , Li Shang-yi , Ma Jian-she , et al . A new continuous rotary electro-hydraulic servomotor applied to simulator[J]. Journal of Nanjing University of Science and Technology, 2001, 25(2): 152-155. | |
| 4 | 刘晓东, 吴云洁, 田大鹏, 等 . 基于干扰观测器的飞行仿真转台滑模控制器[J]. 上海交通大学学报, 2011, 45(3): 393-397. |
| Liu Xiao-dong , Wu Yun-jie , Tian Da-peng , et al . Research of sliding mode controller for flight simulator based on disturbance observer[J]. Journal of Shanghai Jiaotong University, 2011, 45(3): 393-397. | |
| 5 | 王本永, 赵克定, 曹健,等 . 液压仿真转台μ综合法鲁棒控制设计[J]. 哈尔滨工程大学学报, 2008, 29(2): 158-166. |
| Wang Ben-yong , Zhao Ke-ding , Cao Jian , et al . Robust control of hydraulic simulators using a μ-synthesis approach[J]. Journal of Harbin Engineering University, 2008, 29(2): 158-166. | |
| 6 | Mohanty A , Yao B . Indirect adaptive robust control of hydraulic manipulators with accurate parameter estimates[J]. IEEE Transactions on Control Systems Technology, 2011, 19(3): 567-575. |
| 7 | Yao J Y , Jiao Z X , Yao B , et al . Nonlinear adaptive robust force control of hrdraulic load simulator[J]. Chinese Journal of Aeronautics, 2012, 25(5): 766-775. |
| 8 | Sun W C , Gao H J , Kaynak O . Adaptive backstepping control for active suspension systems with hard constraints[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(3): 1072-1079. |
| 9 | 韩松杉, 焦宗夏, 汪成文, 等 . 基于神经网络的电液转台非线性积分滑模控制[J]. 北京航空航天大学学报, 2014, 40(3): 321-326. |
| Han Song-shan , Jiao Zong-xia , Wang Cheng-wen , et al . Integral sliding mode nonlinear controller of electrical hydraulic flightsimulator based on neural network[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(3): 321-326. | |
| 10 | 封文涛 . 大排量连续回转电液伺服马达控制性能的研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院, 2011. |
| Feng Wen-tao . Research on the control performance of continuous rotary electro-hydraulic servo motors with large displacement[D]. Harbin: Instituation of Mechnical and Electrical Engineering, Harbin Institute of Technology, 2011. | |
| 11 | 刘国建, 李运华, 郑琦, 等 . 直升机桨距调节助力器电液加载系统的 H ∞ 控制[J]. 北京航空航天大学学报, 2011, 37(2): 140-143. |
| Liu Guo-jian , Li Yun-hua , Zheng Qi , et al . H ∞ control of electro-hydraulic loading system for helicopter pitch adjustment booster[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(2): 140-143. | |
| 12 | 高延峰, 张华, 肖建华 . 移动机器人弯曲角焊缝跟踪预测模糊控制器设计[J]. 机械工程学报, 2010, 46(23): 23-29. |
| Gao Yan-feng , Zhang Hua , Xiao Jian-hua . Design of fuzzy controller for tracking prediction of curved robot[J]. Journal of Mechanical Engineering, 2010, 46(23): 23-29. | |
| 13 | 靳宝全 . 电液位置伺服控制系统的模糊滑模控制方法研究[D]. 太原: 太原理工大学机械工程学院, 2010. |
| Jin Bao-quan . Study on the fuzzy sliding mode control method of electro-hydraulic position servo control system[D]. Taiyuan: Instituation of Mechnical Engineering, Taiyuan University of Technology, 2010. | |
| 14 | 陈虹 . 模型预测控制[M]. 北京: 科学出版社, 2013. |
| 15 | 安宝冉 . 基于预测控制的网络化系统若干控制问题研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院, 2014. |
| An Bao-ran . Several control problems of networked systems based on predictive control[D]. Harbin: Instituation of Mechnical and Electrical Engineering, Harbin Institute of Technology, 2014. | |
| 16 | 徐成华 . 锅炉主蒸汽温度多模型预测函数控制应用研究[D]. 大连: 大连理工大学自动化系, 2010. |
| Xu Cheng-hua . Application of multi model predictive functional control for boiler main steam temperature[D]. Dalian: Department of Automation, Dalian University of Technology, 2010. | |
| 17 | 高远 . 基于预测函数控制的无刷直流电机转速控制[D]. 沈阳: 东北大学信息科学与工程学院, 2013. |
| Gao Yuan . Speed control of brushless DC motor based on predictive functional control[D]. Shenyang: Instituation of Information Science and Engineering, Northeastern University, 2013. | |
| 18 | 刘金琨 . 滑模变结构控制MATLAB仿真[M]. 北京: 清华大学出版社, 2005. |
| 19 | 薛定宇 . 控制系统计算机辅助设计[M]. 北京: 清华大学出版社, 1996. |
| 20 | Bessa W M , Dutra M S , Kreuzer E . Sliding mode control with adaptive fuzzy dead-zone compensation of an electro-hydraulic servo-system[J]. Journal of Intelligent and Robotic Systems, 2010, 8(1): 3-16. |
| 21 | Lei J B , Wang X Y , Pi Y J . Sliding mode control in position control for asymmetrical hydraulic cylinder with chambers connected[J]. Journal of Shanghai Jiaotong Universtiy, 2013, 18(4): 454-459. |
| 22 | 赵治国, 胡笑天, 姜娇龙 . 干式双离合器自动变速器起步滑模变结构协调控制及实时优化[J]. 机械工程学报, 2012, 48(24): 87-105. |
| Zhao Zhi-guo , Hu Xiao-tian , Jiang Jiao-long . Sliding mode variable structure coordinated control and real-time optimization for dry dual clutch transmission[J]. Journal of Mechanical Engineering, 2012, 48(24): 87-105. | |
| 23 | 丁虎, 张健沛 . 船用锅炉蒸汽压力系统的滑模预测控制[J]. 哈尔滨工程大学学报, 2010, 31(8): 1039-1042. |
| Ding Hu , Zhang Jian-pei . Sliding mode predictive controller for a ship boiler steam pressure system[J]. Journal of Harbin Engineering University, 2010, 31(8): 1039-1042. | |
| 24 | 高海燕, 蔡远利 . 高超声速飞行器的滑模预测控制方法[J]. 西安交通大学学报, 2014, 48(1): 67-72. |
| Gao Hai-yan , Cai Yuan-li . Sliding mode predictive control for hypersonic vehicle[J]. Journal of Xi'an Jiaotong University, 2014, 48(1): 67-72. | |
| 25 | 郭敬 . 液压仿真转台低速性能及其预测函数控制研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院, 2009. |
| Guo Jing . Low-speed performance and predictive functional control of hydraulic simulator[D]. Harbin: Instituation of Mechnical and Electrical Engineering, Harbin Institute of Technology, 2009. | |
| 26 | 马修真, 赵加凤 . 基于Laguerre-Fuzzy Hammerstein模型的增压锅炉非线性预测控制[J]. 吉林大学学报: 工学版, 2015, 45(1): 209-215. |
| Ma Xiu-zhen , Zhao Jia-feng . Nonlinear predictive control for supercharged boiler basedon Laguerre-fuzzy Hammerstein model[J]. Journal of Jilin University (Engineering and Technology Edition), 2015, 45(1): 209-215. | |
| 27 | 周涌, 陈庆伟, 胡维礼 . 内模控制研究的新发展[J]. 控制理论与应用, 2004, 21(3): 475-482. |
| Zhou Yong , Chen Qing-wei , Hu Wei-li . New developments of research on internal model control[J]. Control Theory & Applications, 2004, 21(3): 475-482. | |
| 28 | Rossiter J A , Richalet J . Handling constraints with predictive functional control of unstable processes[C]⫽Proc of the American Control Conference. New York: Institute of Electrical and Electronics Engineers Inc, 2002: 4746-4751. |
| 29 | 姜继海, 葛泽华, 杨晨, 等 . 基于微分器的直驱电液伺服系统离散滑模控制[J]. 吉林大学学报: 工学版, 2018, 48(5): 1492-1499. |
| Jiang Ji-hai , Ge Ze-hua , Yang Chen , et al . Differentitor-based discrete variable structure controller for direct drive electro-hydraulic servo system[J]. Journal of Jilin University (Engineering and Technology Edition), 2018, 48(5): 1492-1499. | |
| 30 | 陈杰, 莫玮 . 履带式移动机械臂的自适应模糊滑模控制[J]. 吉林大学学报: 工学版, 2015, 45(3): 892-898. |
| Chen Jie , Mo Wei . Adaptive fuzzy sliding mode control for crawler-type mobile manipulators[J]. Journal of Jilin University (Engineering and Technology Edition), 2015, 45(3): 892-898. | |
| 31 | 武晓峰 . 连续回转电液伺服马达性能研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院, 2009. |
| Wu Xiao-feng . Research on performance of continuous rotation electro-hydraulic servo motor[D]. Harbin: Instituation of Mechnical and Electrical Engineering, Harbin Institute of Technology, 2009. | |
| 32 | 何宇华 . 连续回转电液伺服马达性能的控制研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院, 2010. |
| He Yu-hua . Research on performance of continuous rotation electro-hydraulic servo motor based on controller[D]. Harbin: Instituation of Mechnical and Electrical Engineering, Harbin Institute of Technology, 2010. |
| [1] | 卢秀泉,胡春玉,柴亚龙,马文星,张剑楠. 大功率液力偶合器调速工况瞬态流场特性[J]. 吉林大学学报(工学版), 2019, 49(5): 1539-1546. |
| [2] | 闻德生,隋广东,田山恒,王少朋,冯佩坤,刘小雪. 内外啮合齿轮马达泄漏与容积效率分析及试验[J]. 吉林大学学报(工学版), 2019, 49(4): 1186-1193. |
| [3] | 刘建芳, 王记波, 刘国君, 李新波, 梁实海, 杨志刚. 基于PMMA内嵌三维流道的压电驱动微混合器[J]. 吉林大学学报(工学版), 2018, 48(5): 1500-1507. |
| [4] | 姜继海, 葛泽华, 杨晨, 梁海健. 基于微分器的直驱电液伺服系统离散滑模控制[J]. 吉林大学学报(工学版), 2018, 48(5): 1492-1499. |
| [5] | 刘祥勇, 李万莉. 包含蓄能器的电液比例控制模型[J]. 吉林大学学报(工学版), 2018, 48(4): 1072-1084. |
| [6] | 刘国君, 马祥, 杨志刚, 王聪慧, 吴越, 王腾飞. 集成式三相流脉动微混合芯片[J]. 吉林大学学报(工学版), 2018, 48(4): 1063-1071. |
| [7] | 王佳怡, 刘昕晖, 王昕, 齐海波, 孙晓宇, 王丽. 数字二次元件变量冲击机理及其抑制[J]. 吉林大学学报(工学版), 2017, 47(6): 1775-1781. |
| [8] | 闻德生, 王京, 高俊峰, 周聪. 双定子单作用叶片泵闭死容腔的压力特性[J]. 吉林大学学报(工学版), 2017, 47(4): 1094-1101. |
| [9] | 刘国君, 张炎炎, 杨旭豪, 李新波, 刘建芳, 杨志刚. 声表面波技术在金纳米粒子可控制备中的应用[J]. 吉林大学学报(工学版), 2017, 47(4): 1102-1108. |
| [10] | 王丽, 刘昕晖, 王昕, 陈晋市, 梁燚杰. 装载机数字液压传动系统换挡策略[J]. 吉林大学学报(工学版), 2017, 47(3): 819-826. |
| [11] | 张敏, 李松晶, 蔡申. 基于无阀压电微泵控制的微流控液体变色眼镜[J]. 吉林大学学报(工学版), 2017, 47(2): 498-503. |
| [12] | 顾守东, 刘建芳, 杨志刚, 焦晓阳, 江海, 路崧. 压电式锡膏喷射阀特性[J]. 吉林大学学报(工学版), 2017, 47(2): 510-517. |
| [13] | 闻德生, 陈帆, 甄新帅, 周聪, 王京, 商旭东. 双定子泵和马达在压力控制回路中的应用[J]. 吉林大学学报(工学版), 2017, 47(2): 504-509. |
| [14] | 李慎龙, 刘树成, 邢庆坤, 张静, 赖宇阳. 基于LBM-LES模拟的离合器摩擦副流致运动效应[J]. 吉林大学学报(工学版), 2017, 47(2): 490-497. |
| [15] | 张健, 姜继海, 李艳杰. 锥型节流阀流量特性[J]. 吉林大学学报(工学版), 2016, 46(6): 1900-1905. |
|
||