吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (5): 1558-1566.doi: 10.13229/j.cnki.jdxbgxb20180982
• • 上一篇
减重站起康复训练系统机械结构设计与优化
曹恩国1( ),刘坤2(),吉硕2,孙震源2,徐洪伟2,骆星吉2
),刘坤2(),吉硕2,孙震源2,徐洪伟2,骆星吉2
- 1. 江南大学 设计学院,江苏 无锡 214122
2. 吉林大学 机械与航空航天工程学院,长春130022
Mechanical structure design and optimization of weight-support STS rehabilitation training system
En-guo CAO1(),Kun LIU2(),Shuo JI2,Zhen-yuan SUN2,Hong-wei XU2,Xing-ji LUO2
- 1. School of Design, Jiangnan University, Wuxi 214122, China
2. School of Mechanical and Aerospace Engineering, Jilin University, Changchun 130022, China
摘要:
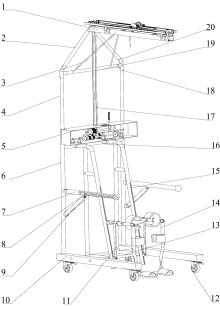
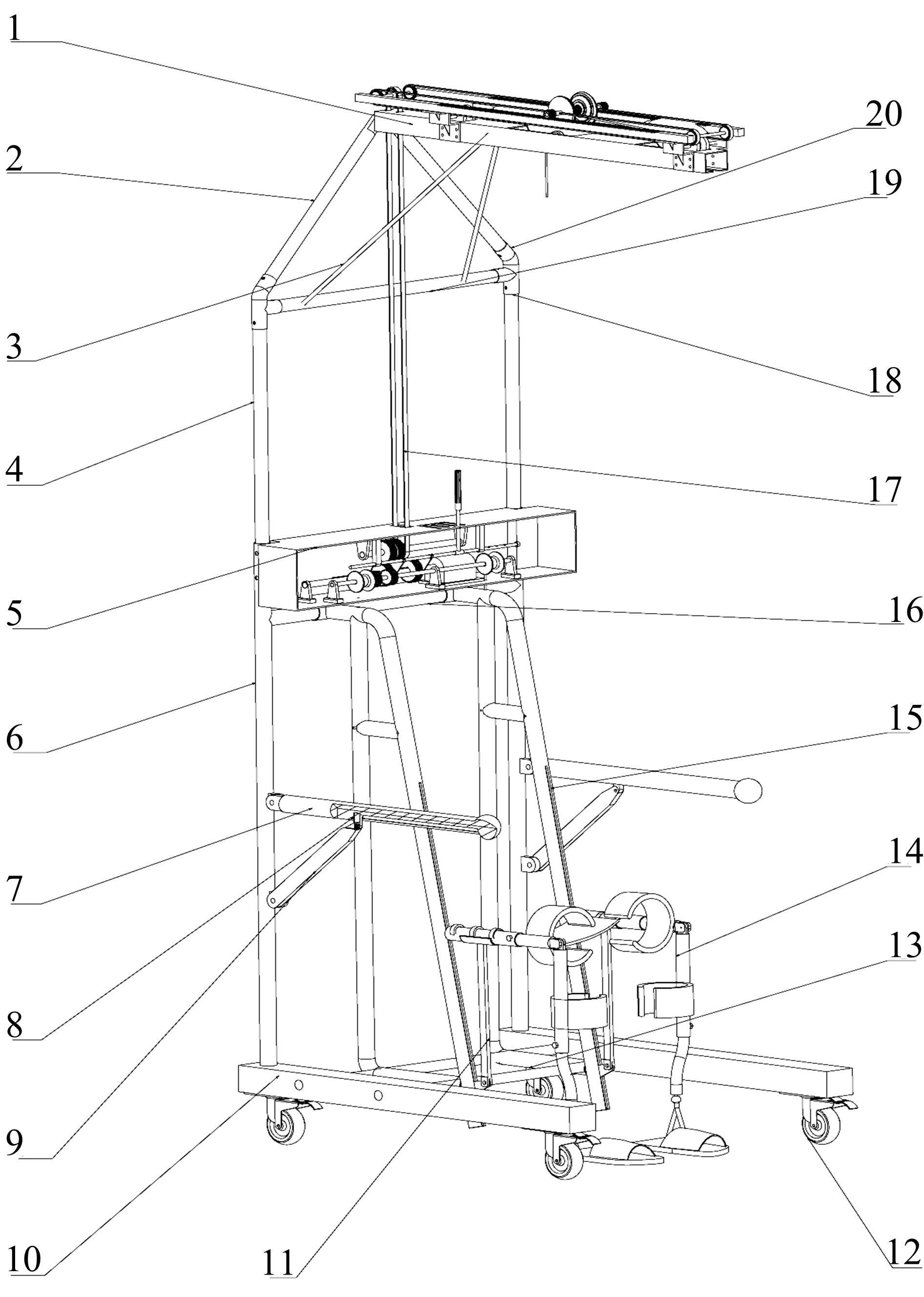
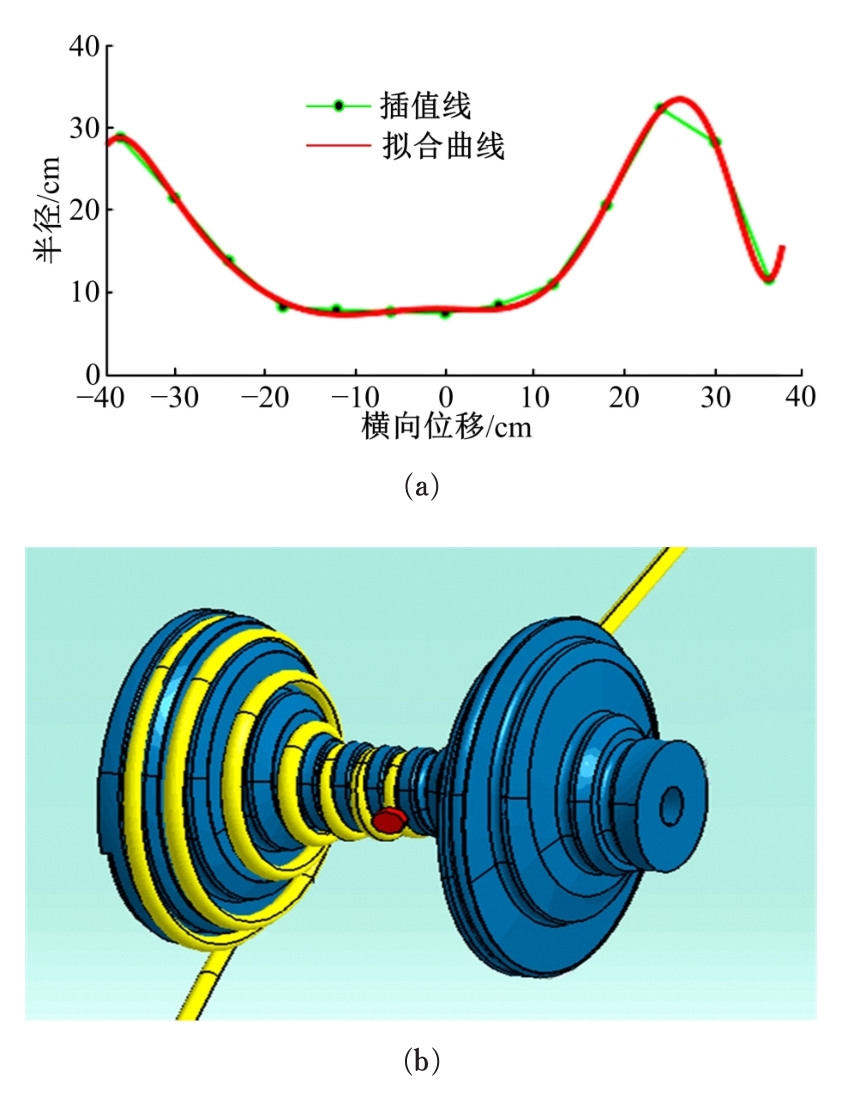
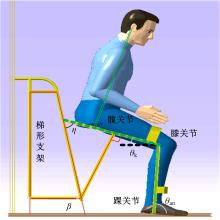
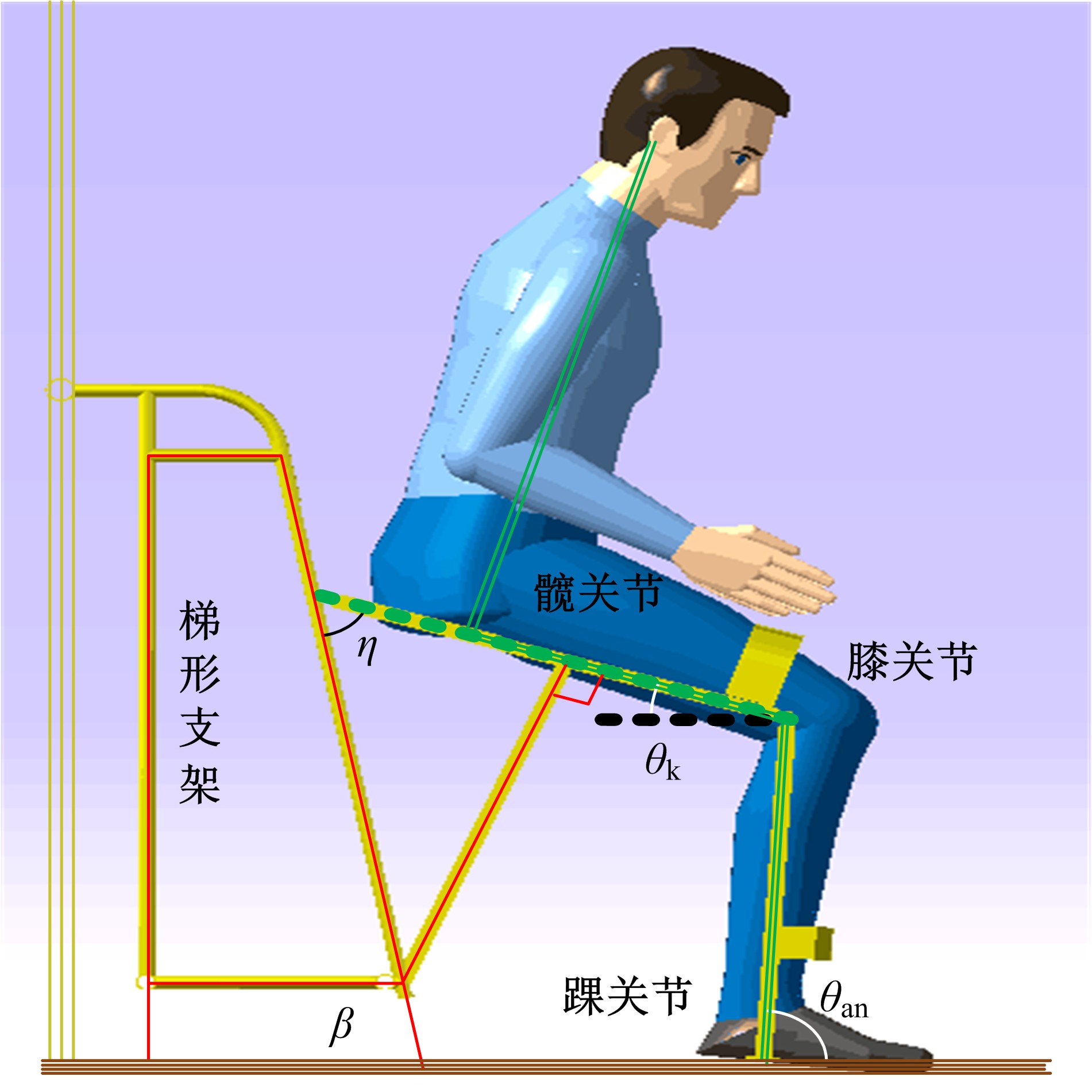
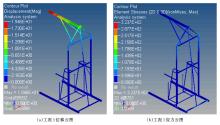
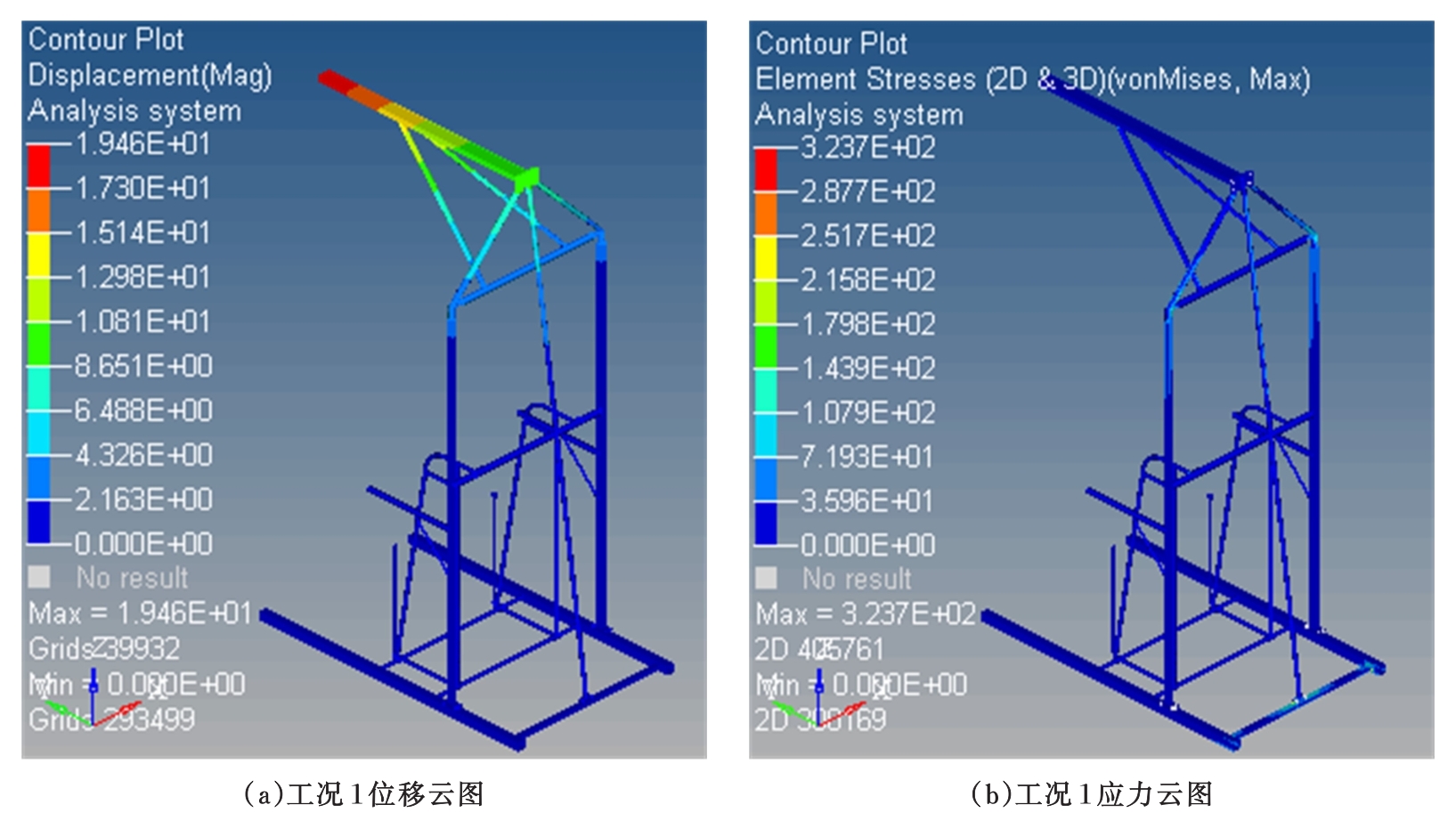
基于人体工程学设计并优化了一种多功能坐站运动辅助与康复运动训练机器结构,可使患者按照对标健康人体站起运动轨迹进行减重式康复运动训练。重点设计了下肢矫助外骨骼结构和顶端哑铃形螺旋绕线轮,对整体机械结构及主要零部件进行了力学分析和尺寸优化。可使存在下肢运动功能障碍的使用者不仅可获得坐站运动辅助,而且可以使下肢肌群完全按照对标健康人体站起时肌肉正确施力规划进行康复训练,避免产生因站起姿势扭曲导致的肌肉畸态施力,从而获得安全、健康的康复运动训练效果。
中图分类号:
- TN122


| 1 | Huffman K D , Sanford B A , Zucker-Levin A R , et al . Increased hip abduction in high body mass index subjects during sit-to-stand[J]. Gait & Posture, 2015, 41(2): 640-645. |
| 2 | Tannous H , Istrate D , Tho M C H B , et al . Serious game and functional rehabilitation for the lower limbs[J]. European Research in Telemedicine, 2016, 5(2): 65-69. |
| 3 | Wu J , Gao J , Song R , et al . The design and control of a 3DOF lower limb rehabilitation robot[J]. Mechatronics, 2016, 33: 13-22. |
| 4 | Mohanta J K , Mohan S , Deepasundar P , et al . Development and control of a new sitting-type lower limb rehabilitation robot[J/OL]. [2017-09-13]. https:⫽ |
| 5 | Kamnik R , Bajd T . Human voluntary activity integration in the control of a standing-up rehabilitation robot:a simulation study[J]. Medical Engineering & Physics, 2007, 29(9): 1019-1029. |
| 6 | 王志强 . 站立康复功能辅助机器人系统的控制及其关键技术研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院, 2014. |
| Wang Zhi-qiang . Control of the rehabilitative standing-up robot system for sit-to-stand motion and research on ker technology[D]. Harbin: School of Mechatronics Engineering, Harbin Institute of Technology, 2014. | |
| 7 | Nuzik S , Lamb R , VanSant A , et al . Sit-to-stand movement pattern: A kinematic study[J]. Physical Therapy, 1986, 66(11): 1708-1713. |
| 8 | Wang T , Jeong H , Watanabe M , et al . Fault classification with discriminant analysis during sit-to-stand movement assisted by a nursing care robot[J]. Mechanical Systems & Signal Processing, 2018, 113: 90-101. |
| 9 | Gama G L , Celestino M L , Barela J A , et al . Effects of gait training with body weight support on a treadmill vs. overground for individuals with stroke[J]. Archives of Physical Medicine & Rehabilitation, 2017, 98(4): 738-745. |
| 10 | GB/T10000—1988. 中国成年人人体尺寸[S]. |
| 11 | Yang T , Zhang W , Huang Q , et al . A smooth and efficient gait planning for humanoids based on human ZMP[J]. Robot, 2017, 39(5): 751-758. |
| 12 | 刘坤, 叶明, 李超, 等 . 臂式站起运动康复训练机械结构设计及分析[J]. 吉林大学学报: 工学版, 2016, 46(5): 1532-1539. |
| Liu Kun , Ye Ming , Li Chao , et al . Design and analysis of an arm mechanical structure for sit-to-stand rehabilitation training[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(5): 1532-1539. |
| [1] | 张艳芹,冯雅楠,孔鹏睿,于晓东,孔祥滨. 基于热油携带的静压支承油膜温度场及试验[J]. 吉林大学学报(工学版), 2019, 49(4): 1203-1211. |
| [2] | 杨成,赵永胜,刘志峰,蔡力钢. 基于多尺度理论的栓接结合部动力学建模[J]. 吉林大学学报(工学版), 2019, 49(4): 1212-1220. |
| [3] | 陈东良,臧睿,段鹏,赵伟鹏,翁旭涛,孙杨,唐艺鹏. 基于新月鱼尾推进理论的多连杆鱼骨仿生设计[J]. 吉林大学学报(工学版), 2019, 49(4): 1246-1257. |
| [4] | 刘坤,吉硕,孙震源,徐洪伟,刘勇,赵静霞. 多功能坐站辅助型如厕轮椅机械结构设计与优化[J]. 吉林大学学报(工学版), 2019, 49(3): 872-880. |
| [5] | 王兴野,张进秋,李国强,彭志召. 惯性质量对齿轮齿条式作动器阻尼特性的影响[J]. 吉林大学学报(工学版), 2019, 49(3): 881-887. |
| [6] | 王家序,倪小康,韩彦峰,向果,肖科. 轴向往复运动下微槽轴承混合润滑数值模型[J]. 吉林大学学报(工学版), 2019, 49(3): 888-896. |
| [7] | 毕秋实,王国强,黄婷婷,毛瑞,鲁艳鹏. 基于DEM-FEM耦合的双齿辊破碎机辊齿强度分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1770-1776. |
| [8] | 朱伟,王传伟,顾开荣,沈惠平,许可,汪源. 一种新型张拉整体并联机构刚度及动力学分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1777-1786. |
| [9] | 刘建芳, 王记波, 刘国君, 李新波, 梁实海, 杨志刚. 基于PMMA内嵌三维流道的压电驱动微混合器[J]. 吉林大学学报(工学版), 2018, 48(5): 1500-1507. |
| [10] | 毛宇泽, 王黎钦. 鼠笼支撑一体化结构对薄壁球轴承承载性能的影响[J]. 吉林大学学报(工学版), 2018, 48(5): 1508-1514. |
| [11] | 王涛, 伞晓刚, 高世杰, 王惠先, 王晶, 倪迎雪. 光电跟踪转台垂直轴系动态特性[J]. 吉林大学学报(工学版), 2018, 48(4): 1099-1105. |
| [12] | 刘坤, 刘勇, 闫建超, 吉硕, 孙震源, 徐洪伟. 基于体外传感检测的人体站起动力学分析[J]. 吉林大学学报(工学版), 2018, 48(4): 1140-1146. |
| [13] | 栾鑫, 邓卫, 程琳, 陈新元. 特大城市居民出行方式选择行为的混合Logit模型[J]. 吉林大学学报(工学版), 2018, 48(4): 1029-1036. |
| [14] | 吉野辰萌, 樊璐璐, 闫磊, 徐涛, 林烨, 郭桂凯. 基于MBNWS算法的假人胸部结构多目标优化设计[J]. 吉林大学学报(工学版), 2018, 48(4): 1133-1139. |
| [15] | 贺继林, 陈毅龙, 吴钪, 赵喻明, 汪志杰, 陈志伟. 起重机卷扬系统能量流动分析及势能回收系统实验[J]. 吉林大学学报(工学版), 2018, 48(4): 1106-1113. |
|
||