吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (5): 1565-1573.doi: 10.13229/j.cnki.jdxbgxb20190630
• 车辆工程·机械工程 • 上一篇
基于轮胎力预判与拟合的轨迹跟踪控制
陈吉清1,2( ),蓝庆生1,2,兰凤崇1,2(),刘照麟1,2
),蓝庆生1,2,兰凤崇1,2(),刘照麟1,2
- 1.华南理工大学 机械与汽车工程学院, 广州 510640
2.华南理工大学 广东省汽车工程重点实验室, 广州 510640
Trajectory tracking control based on tire force prediction and fitting
Ji-qing CHEN1,2(),Qing-sheng LAN1,2,Feng-chong LAN1,2(),Zhao-lin LIU1,2
- 1.School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510640, China
2.Guangdong Provincial Key Laboratory of Automotive Engineering, South China University of Technology, Guangzhou 510640, China
摘要:
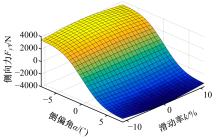
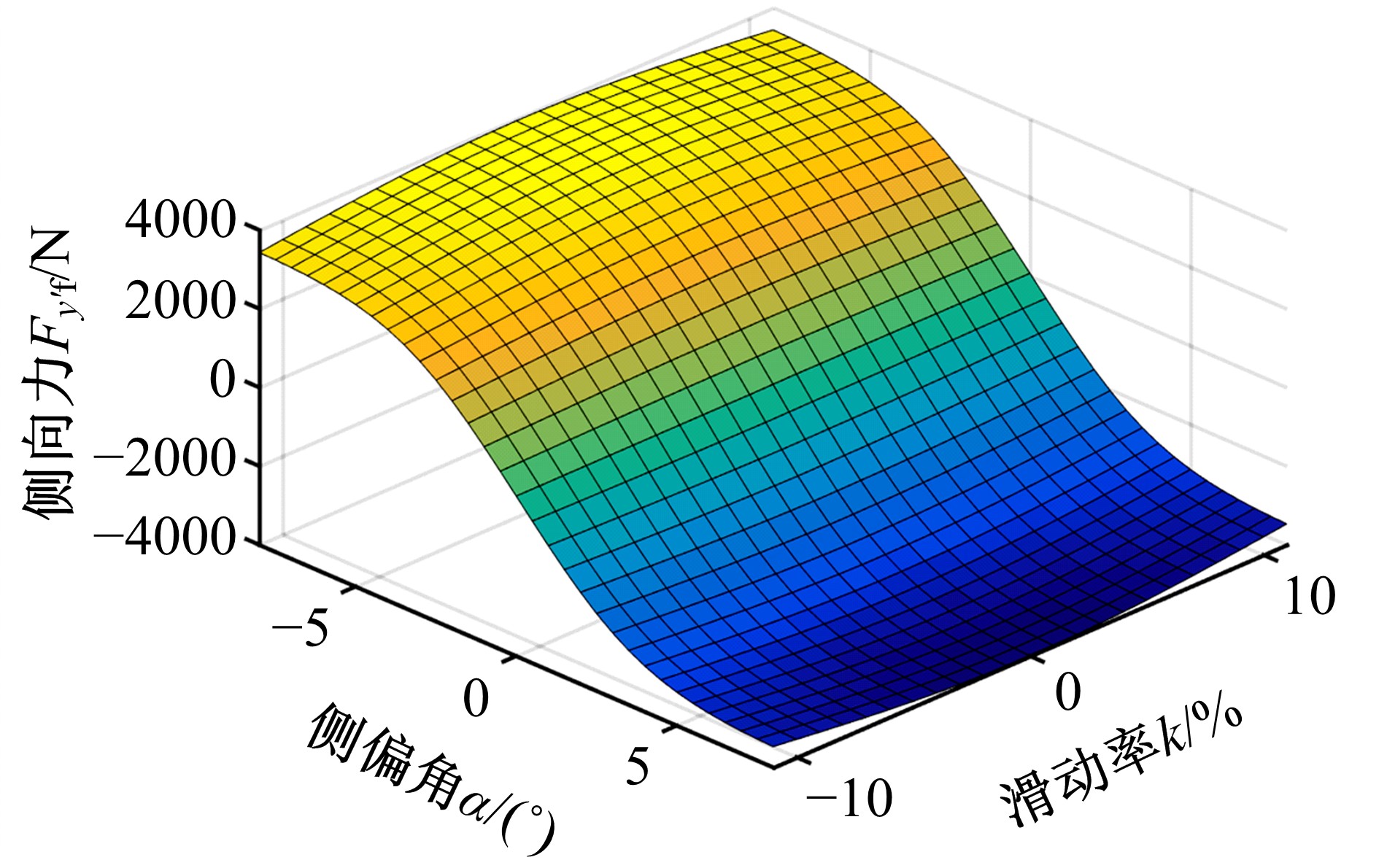
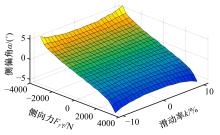
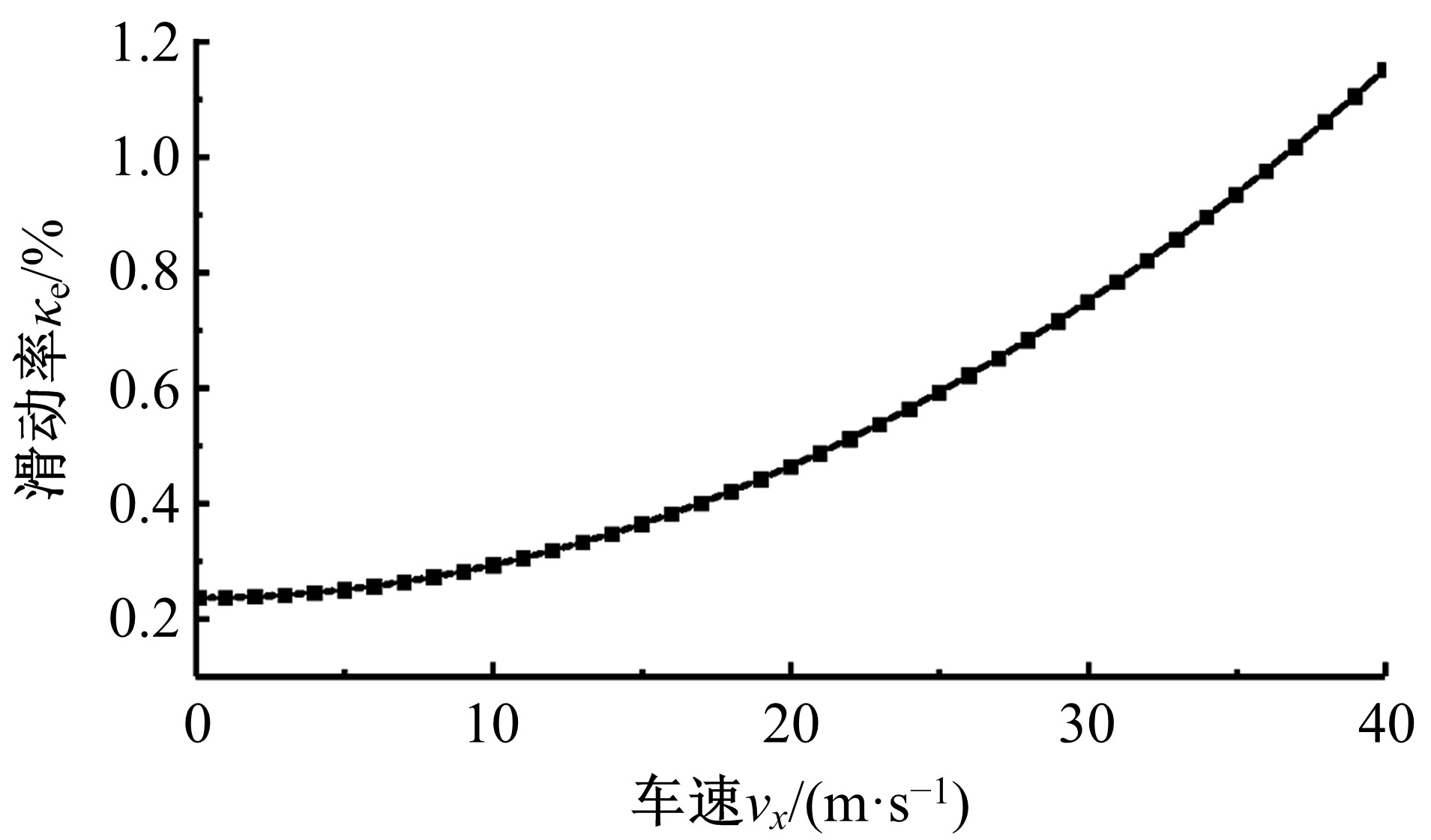
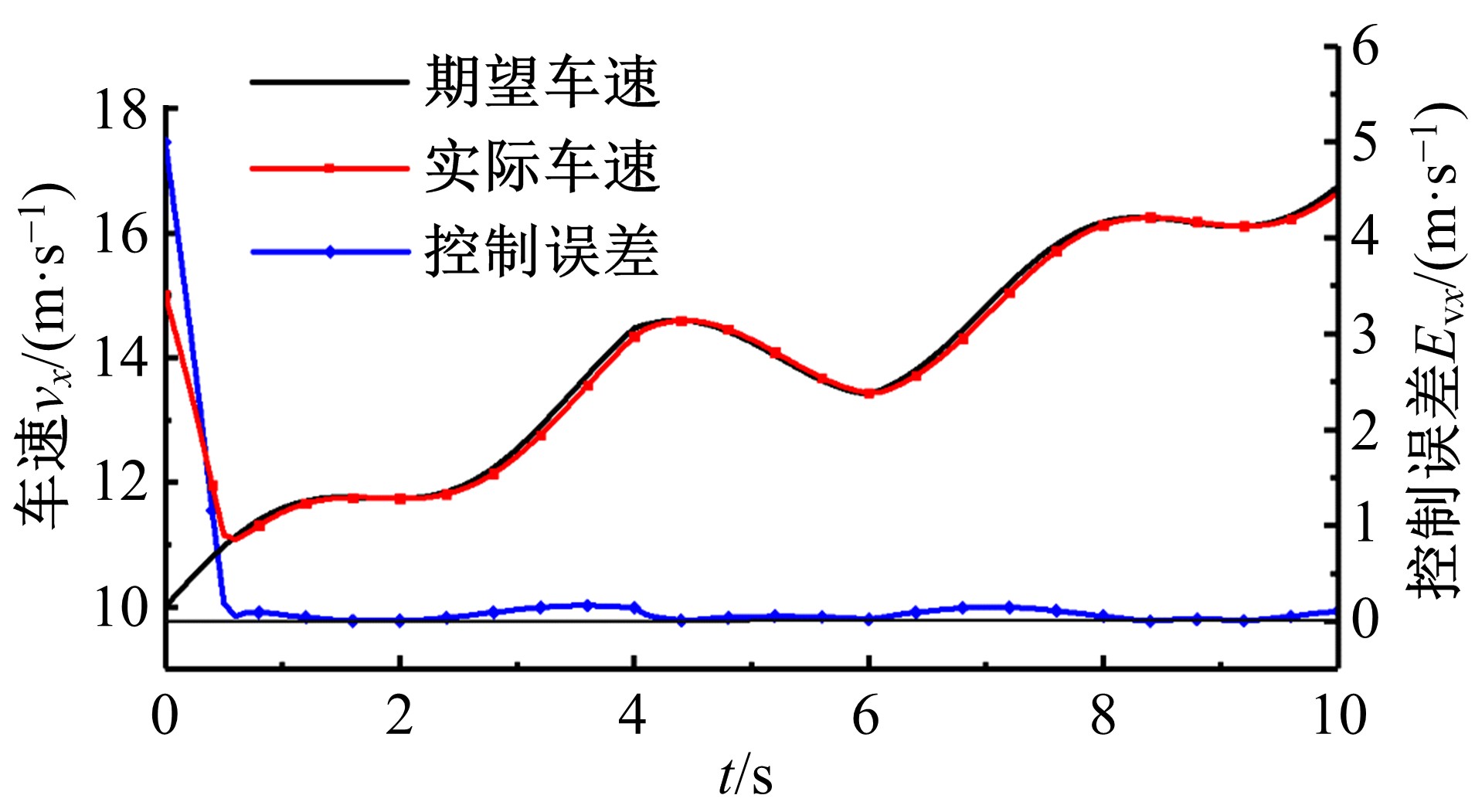
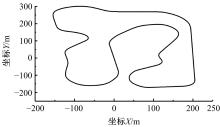
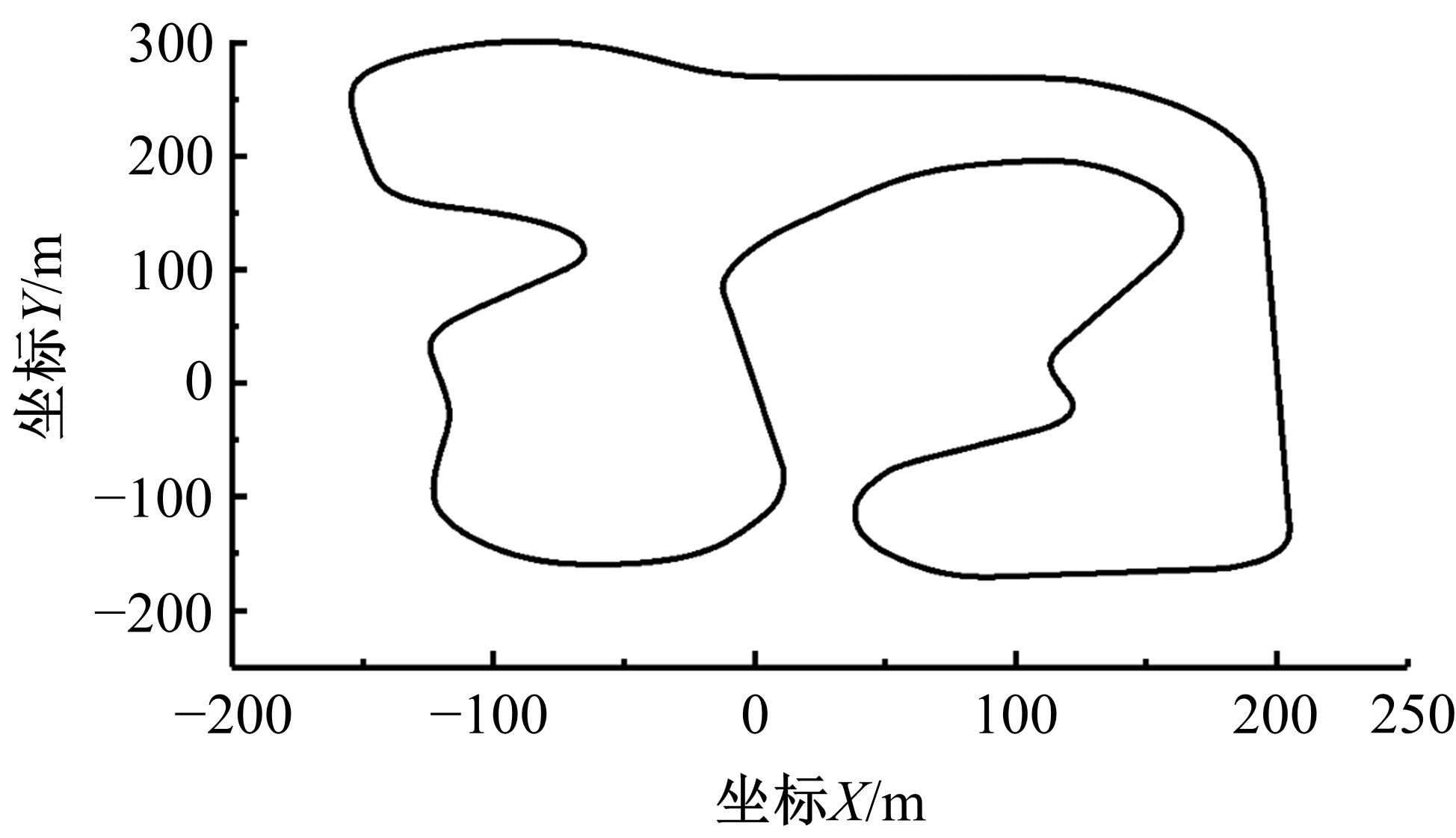
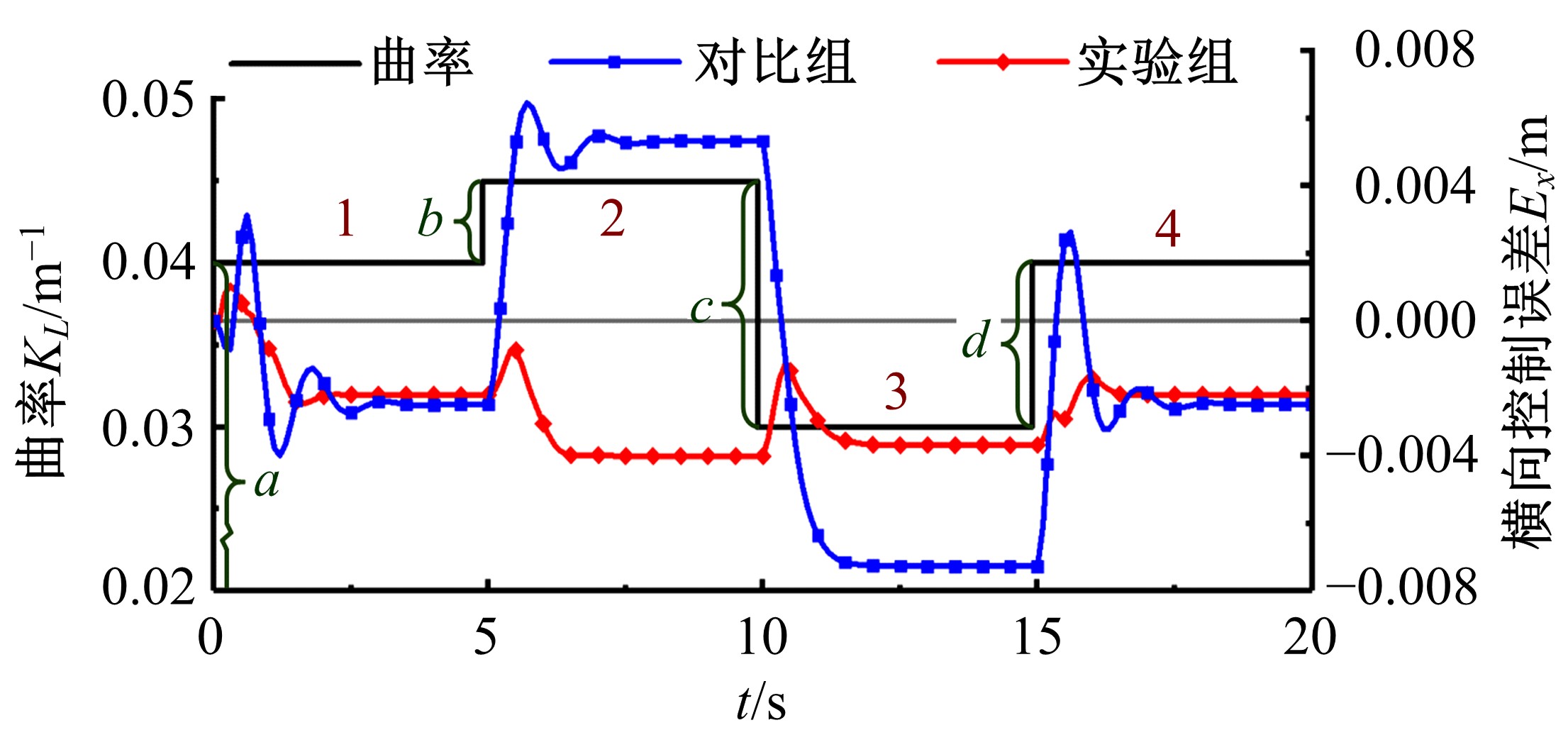
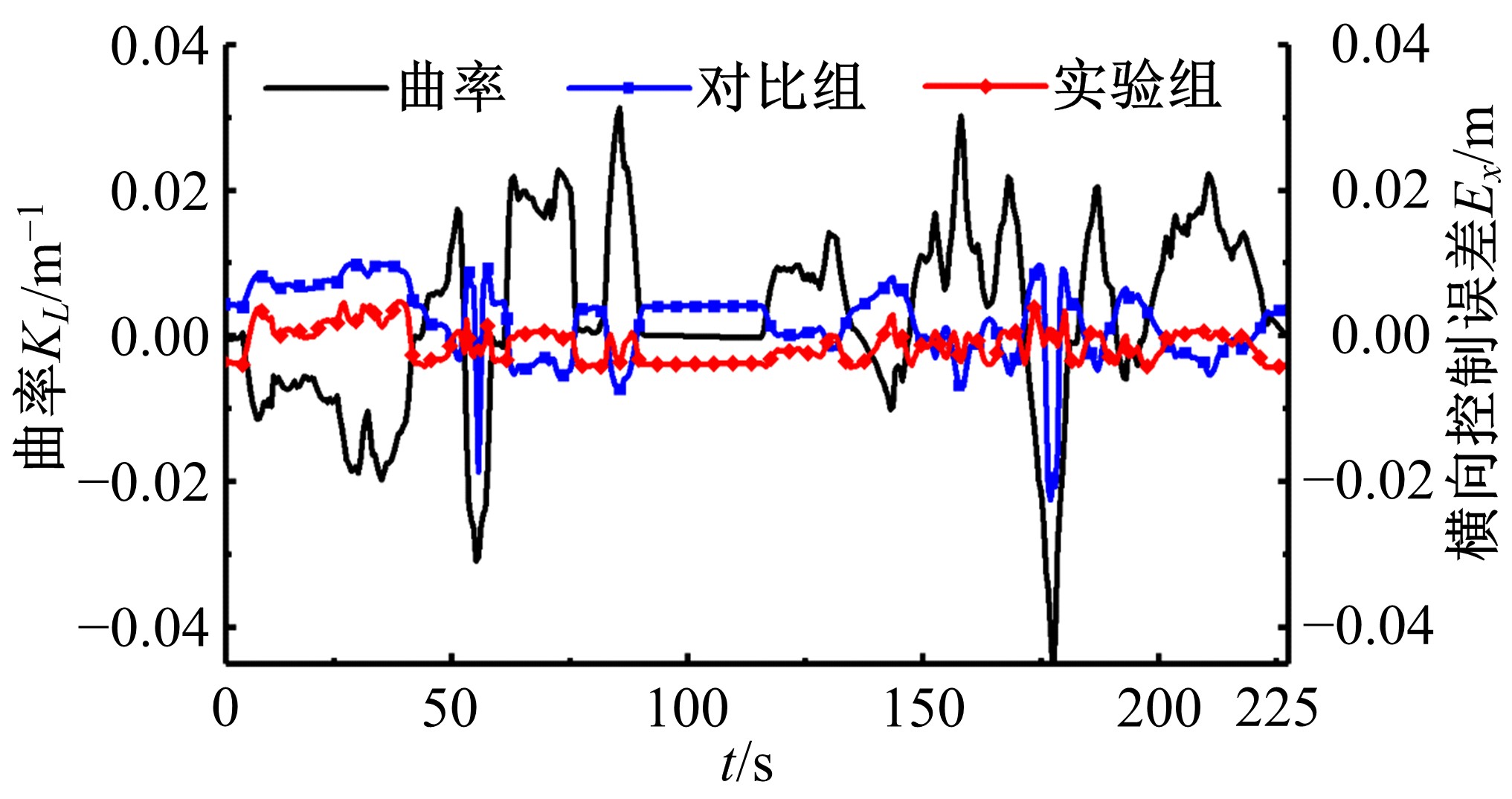
轮胎与地面的复杂作用过程决定其模型的反解不充分存在,因而无法直接求解考虑了轮胎特性的复合车辆模型由轨迹得到期望控制量。为此,提出了基于轮胎力预判与拟合的轨迹跟踪控制策略,根据物理层面的界限将轨迹跟踪控制分解成为上、下两层进行:上层控制采用终端滑模控制算法,根据目标曲率动态求解车身动力学实现对期望前轮侧向力的预判;下层控制采用系统辨识思想提取轮胎特征点数据,通过样条函数直接拟合轮胎力的作用特性得到期望转向角度。建立复合车身与轮胎的12自由度车辆动力学模型,并依据保持不同车速所需滑动率试验值,建立半经验滑模纵向控制策略实现对车速的控制。最后,以神经网络构建对比算法,在考验稳定性的阶跃曲率工况及模拟连续转弯道路的多变曲率工况下,验证了轮胎力预判与拟合算法的高效性及全局鲁棒性。
中图分类号:
- U461.1





| 1 | 郭景华, 李克强, 罗禹贡. 智能车辆运动控制研究综述[J]. 汽车安全与节能学报, 2016, 7(2): 151-159. |
| Guo Jing-hua, Li Ke-qiang, Luo Yu-gong. A review of research on intelligent vehicle motion control[J]. Journal of Automotive Safety and Energy, 2016, 7(2): 151-159. | |
| 2 | 陈慧岩, 陈舒平, 龚建伟. 智能汽车横向控制方法研究综述[J]. 兵工学报, 2017, 38(6): 1203-1214. |
| Chen Hui-yan, Chen Shu-ping, Gong Jian-wei. A review on the research of lateral control for intelligent vehicles[J]. Acta Armamentarii, 2017, 38(6): 1203-1214. | |
| 3 | 沈法鹏, 赵又群, 赵洪光, 等. 非线性轮胎侧向力对汽车转向稳定性的影响[J]. 中国机械工程, 2015, 26(1): 135-139. |
| Shen Fa-peng, Zhao You-qun, Zhao Hong-guang, et al. Effects of nonlinear tire lateral force on vehicle steering stability[J]. China Mechanical Engineering, 2015, 26(1): 135-139. | |
| 4 | Abe M. Vehicle Handling Dynamics: Theory and Application[M]. Oxford: Butterworth-Heinemann, 2015. |
| 5 | Hans B P, Egbert B. The magic formula tyre model[J]. Vehicle System Dynamics, 1992, 21(1): 1-18. |
| 6 | Guo K, Lu D. UniTire: unified tire model for vehicle dynamic simulation[J]. Vehicle System Dynamics, 2007, 45(Sup.1): 79-99. |
| 7 | Truong D V T, Tomaske W. Active front steering system using adaptive sliding mode control[C]∥2013 25th Chinese Control and Decision Conference(CCDC), Guiyang, China, 2013: 253-258. |
| 8 | 李寿涛, 李秋媛, 刘辉, 等. 可实现车辆稳定性控制的滑模变结构策略[J]. 吉林大学学报: 工学版, 2019, 49(4): 1288-1292. |
| Li Shou-tao, Li Qiu-yuan, Liu Hui, et al. Sliding mode variable structure strategy for vehicle stability control[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1288-1292. | |
| 9 | 游峰, 张荣辉, 王海玮, 等. 欠驱动半挂汽车列车的运动建模与跟踪控制[J]. 吉林大学学报: 工学版, 2014, 44(5): 1296-1302. |
| You Feng, Zhang Rong-hui, Wang Hai-wei, et al. Dynamic model and tracking control of tractor semi-trailer vehicle with underactuated system[J]. Journal of Jilin University(Engineering and Technology Edition), 2014, 44(5): 1296-1302. | |
| 10 | 任殿波, 崔胜民, 吴杭哲. 车道保持预瞄控制及其稳态误差分析[J]. 汽车工程, 2016, 38(2): 192-199. |
| Ren Dian-bo, Cui Sheng-min, Wu Hang-zhe. Preview control for lane keeping and its steady-state error analysis[J]. Automotive Engineering, 2016, 38(2): 192-199. | |
| 11 | 汪林久. 基于轮地摩擦补偿机制的无人地面车辆控制方法[D]. 大连: 大连理工大学汽车工程学院, 2016. |
| Wang Lin-jiu. Unmanned ground vehicle control method based on wheel-road friction compensation mechanism[D]. Dalian: School of Automotive Engineering, Dalian University of Technology, 2016. | |
| 12 | Ahmadi J, Sedigh A K, Kabganian M. Adaptive vehicle lateral-plane motion control using optimal tire friction forces with saturation limits consideration[J]. IEEE Transactions on Vehicular Technology, 2009, 58(8): 4098-4107. |
| 13 | 汪瑞杰. 考虑非线性与不确定性的自主无人车辆视觉系统与横向控制系统研究[D]. 南京: 东南大学机械工程学院, 2017. |
| Wang Rui-jie. Research on autonomous unmanned vehicle vision system and lateral control system considering nonlinearity and uncertainty[D]. Nanjing: School of Mechanical Engineering, Southeast University, 2017. | |
| 14 | Hubschneider C, Bauer A, Doll J, et al. Integrating end-to-end learned steering into probabilistic autonomous driving[C]∥2017 IEEE 20th International Conference on Intelligent Transportation Systems(ITSC), Yokohama, Japan, 2017: 1-7. |
| 15 | Kaiser J, Tieck J C V, Hubschneider C, et al. Towards a framework for end-to-end control of a simulated vehicle with spiking neural networks[C]∥2016 IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots(SIMPAR), San Francisco, CA, USA, 2016: 127-134. |
| 16 | 李彦冬, 郝宗波, 雷航. 卷积神经网络研究综述[J]. 计算机应用, 2016, 36(9): 2508-2515, 2565. |
| Li Yan-dong, Hao Zong-bo, Lei Hang. Review of convolutional neural networks[J]. Journal of Computer Applications, 2016, 36(9): 2508-2515, 2565. | |
| 17 | 张剑威. 汽车轮胎力学模型研究[D]. 武汉: 武汉理工大学机电工程学院, 2006. |
| Zhang Jian-wei. Research on mechanical model of automobile tires [D]. Wuhan: School of Mechanical and Electrical Engineering, Wuhan University of Technology, 2006. | |
| 18 | Pacejka H. Tire and Vehicle Dynamics[M]. Oxford: Butterworth-Heinemann, 2005. |
| [1] | 杜常清,曹锡良,何彪,任卫群. 基于混合粒子群算法的双离合变速器参数优化设计[J]. 吉林大学学报(工学版), 2020, 50(5): 1556-1564. |
| [2] | 李静,石求军,洪良,刘鹏. 基于车辆状态估计的商用车ESC神经网络滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1545-1555. |
| [3] | 陈鑫,王宁,沈传亮,冯晓,杨昌海. 后视镜造型对前侧窗气动噪声的影响[J]. 吉林大学学报(工学版), 2020, 50(2): 426-436. |
| [4] | 李小雨,许男,仇韬,郭孔辉. 各向异性刚度对轮胎力学特性及车辆操纵性的影响[J]. 吉林大学学报(工学版), 2020, 50(2): 389-398. |
| [5] | 李银平,靳添絮,刘立. 纯电动铲运机弓网续能系统设计与动态特性仿真[J]. 吉林大学学报(工学版), 2020, 50(2): 454-463. |
| [6] | 赖晨光,王擎宇,胡博,文凯平,陈彦宇. 静气动弹性影响下带小翼汽车尾翼的设计与优化[J]. 吉林大学学报(工学版), 2020, 50(2): 399-407. |
| [7] | 叶辉,刘畅,闫康康. 纤维增强复合材料在汽车覆盖件中的应用[J]. 吉林大学学报(工学版), 2020, 50(2): 417-425. |
| [8] | 马芳武,梁鸿宇,赵颖,杨猛,蒲永锋. 内凹三角形负泊松比结构耐撞性多目标优化设计[J]. 吉林大学学报(工学版), 2020, 50(1): 29-35. |
| [9] | 郭孔辉,黄世庆,吴海东. 适用于高频激励的面内轮胎动态模型[J]. 吉林大学学报(工学版), 2020, 50(1): 19-28. |
| [10] | 王哲,谢怡,臧鹏飞,王耀. 基于极小值原理的燃料电池客车能量管理策略[J]. 吉林大学学报(工学版), 2020, 50(1): 36-43. |
| [11] | 史文库,陈龙,张贵辉,陈志勇. 多级刚度双质量飞轮扭转特性建模与试验验证[J]. 吉林大学学报(工学版), 2020, 50(1): 44-52. |
| [12] | 管欣,金号,段春光,卢萍萍. 汽车行驶道路侧向坡度估计[J]. 吉林大学学报(工学版), 2019, 49(6): 1802-1809. |
| [13] | 陈鑫,阮新建,李铭,王宁,王佳宁,潘凯旋. 基于大涡模拟的离散格式改进方法及应用[J]. 吉林大学学报(工学版), 2019, 49(6): 1756-1763. |
| [14] | 马芳武,倪利伟,吴量,聂家弘,徐广健. 轮腿式全地形移动机器人位姿闭环控制[J]. 吉林大学学报(工学版), 2019, 49(6): 1745-1755. |
| [15] | 靳立强, 田端洋, 田浩, 刘蒙蒙. 汽车电子稳定系统制动增力辅助技术[J]. 吉林大学学报(工学版), 2019, 49(6): 1764-1776. |
|
||