吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (2): 541-548.doi: 10.13229/j.cnki.jdxbgxb20191126
• 交通运输工程·土木工程 • 上一篇
智能网联环境下交叉口双环自适应控制模型
张健1,2,3,4( ),吴坤润1,2,3,杨敏1,2,3,冉斌1,2,3
),吴坤润1,2,3,杨敏1,2,3,冉斌1,2,3
- 1.东南大学 江苏省城市智能交通重点实验室,南京 210096
2.现代城市交通技术江苏高校协同创新中心,南京 210096
3.江苏省物联网技术与应用协同创新中心,南京 210096
4.西藏大学 工学院,拉萨 850000
Double⁃ring adaptive control model of intersection during intelligent and connected environment
Jian ZHANG1,2,3,4(),Kun-run WU1,2,3,Min YANG1,2,3,Bin RAN1,2,3
- 1.Jiangsu Key Laboratory of Urban ITS,Southeast University,Nanjing 210096,China
2.Jiangsu Province Collaborative Innovation Center of Modern Urban Traffic Technologies,Nanjing 210096,China
3.Jiangsu Province Collaborative Innovation Center for Technology and Application of Internet of Things,Nanjing 210096,China
4.School of Engineering,Tibet University,Lhasa 850000,China
摘要:
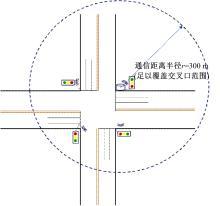
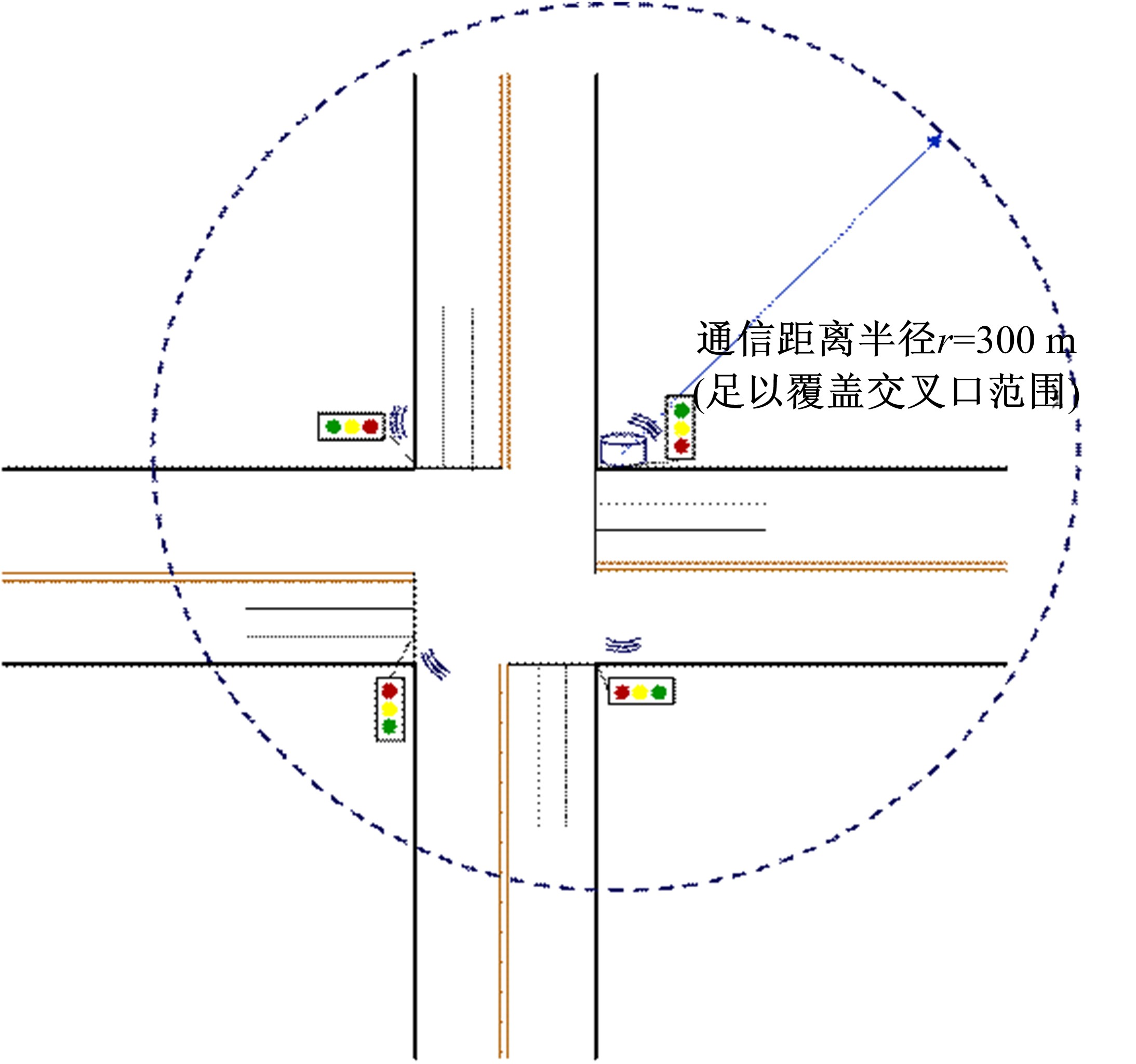
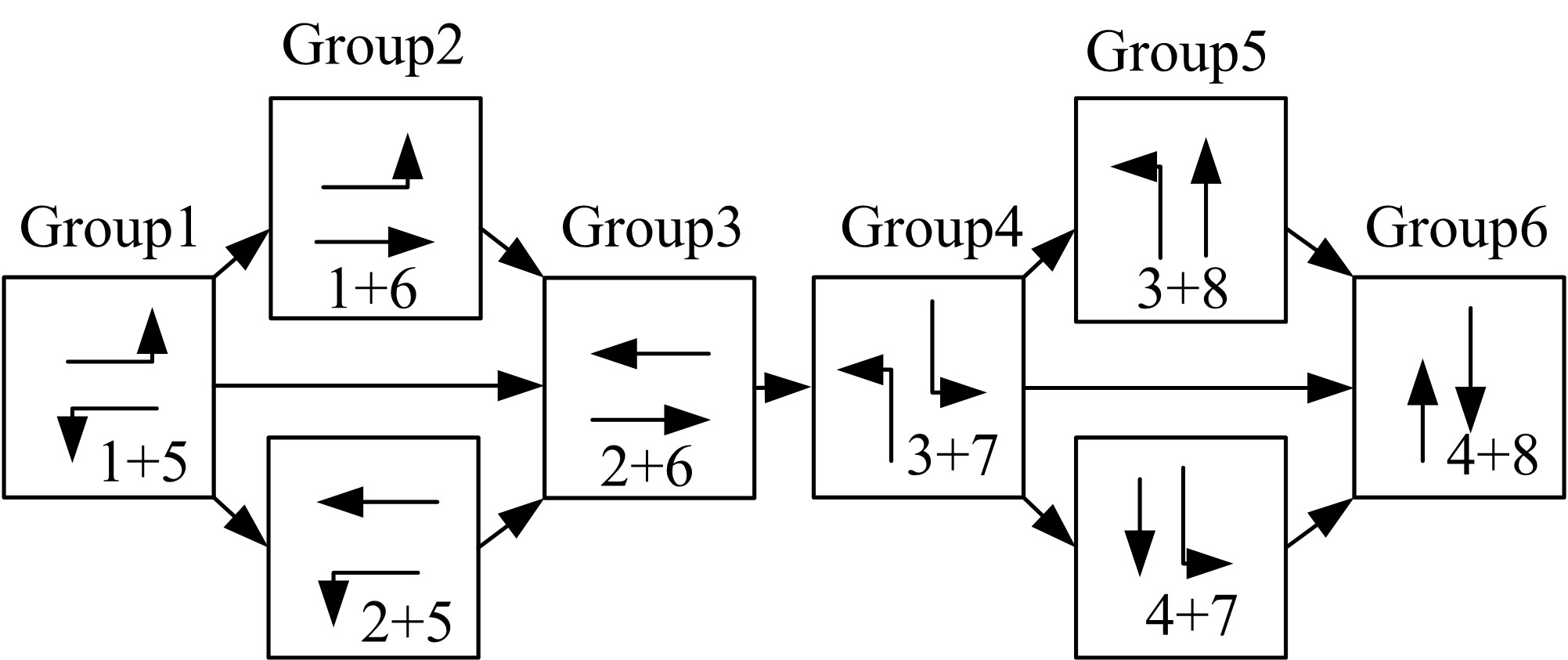
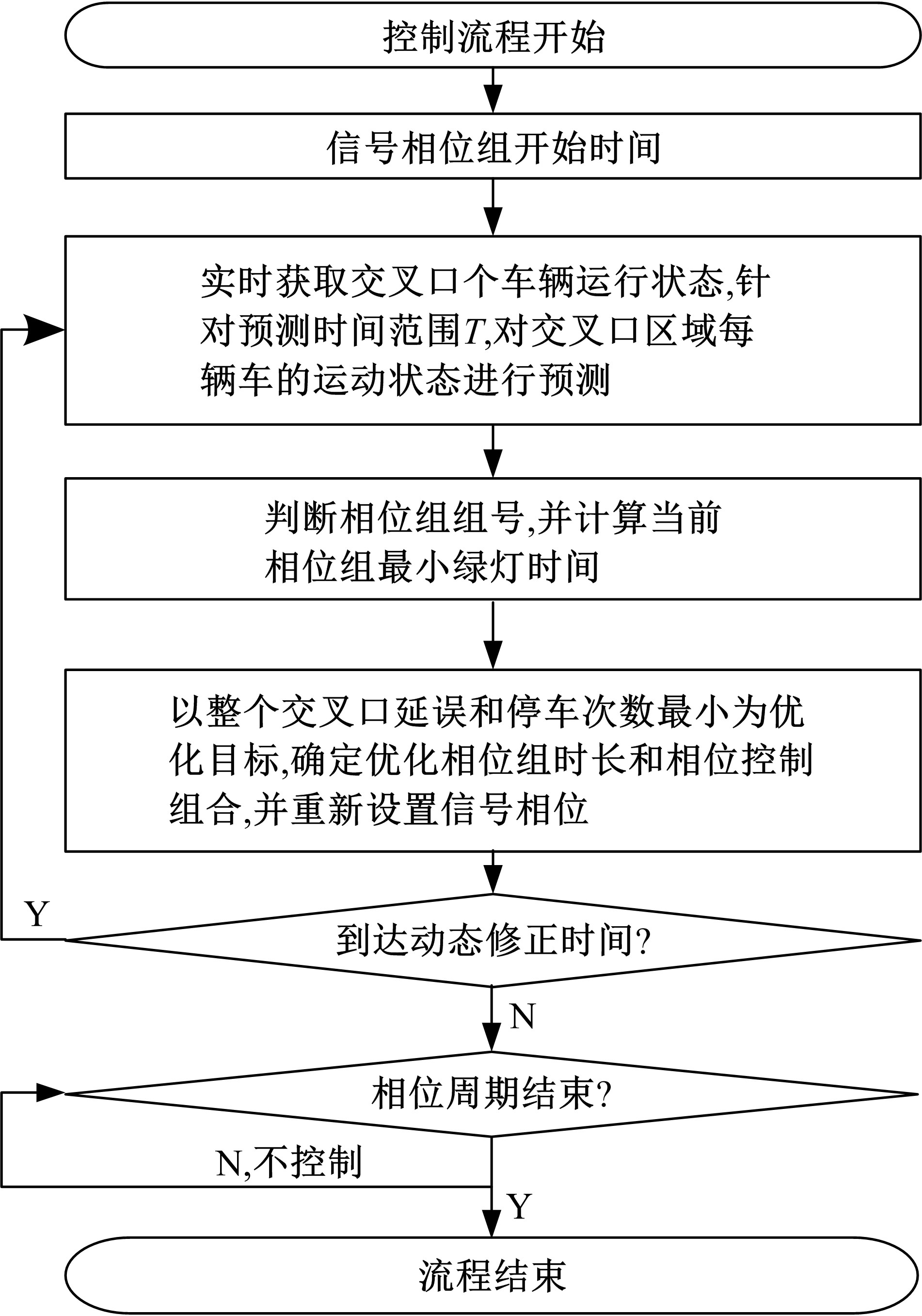
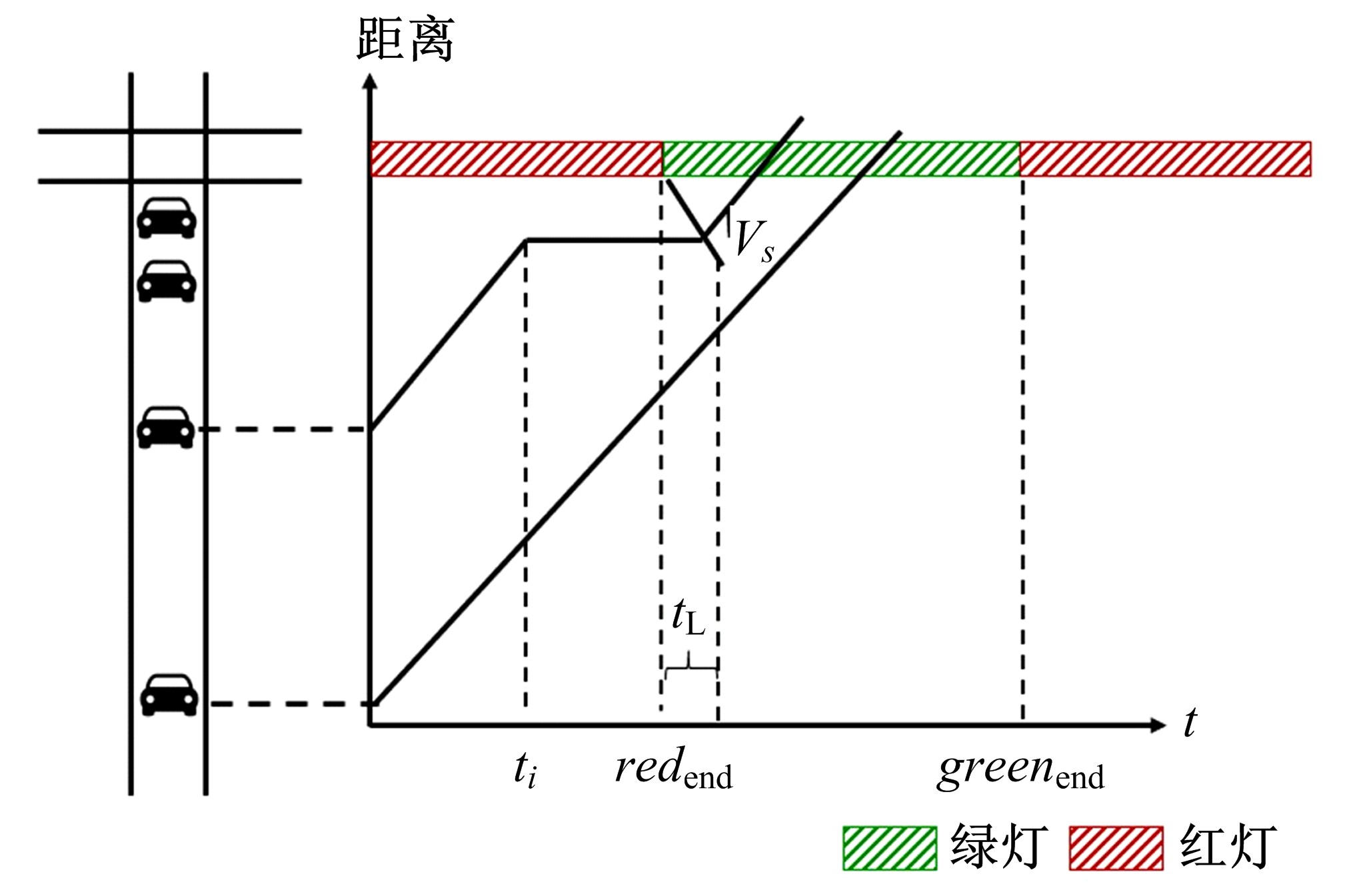
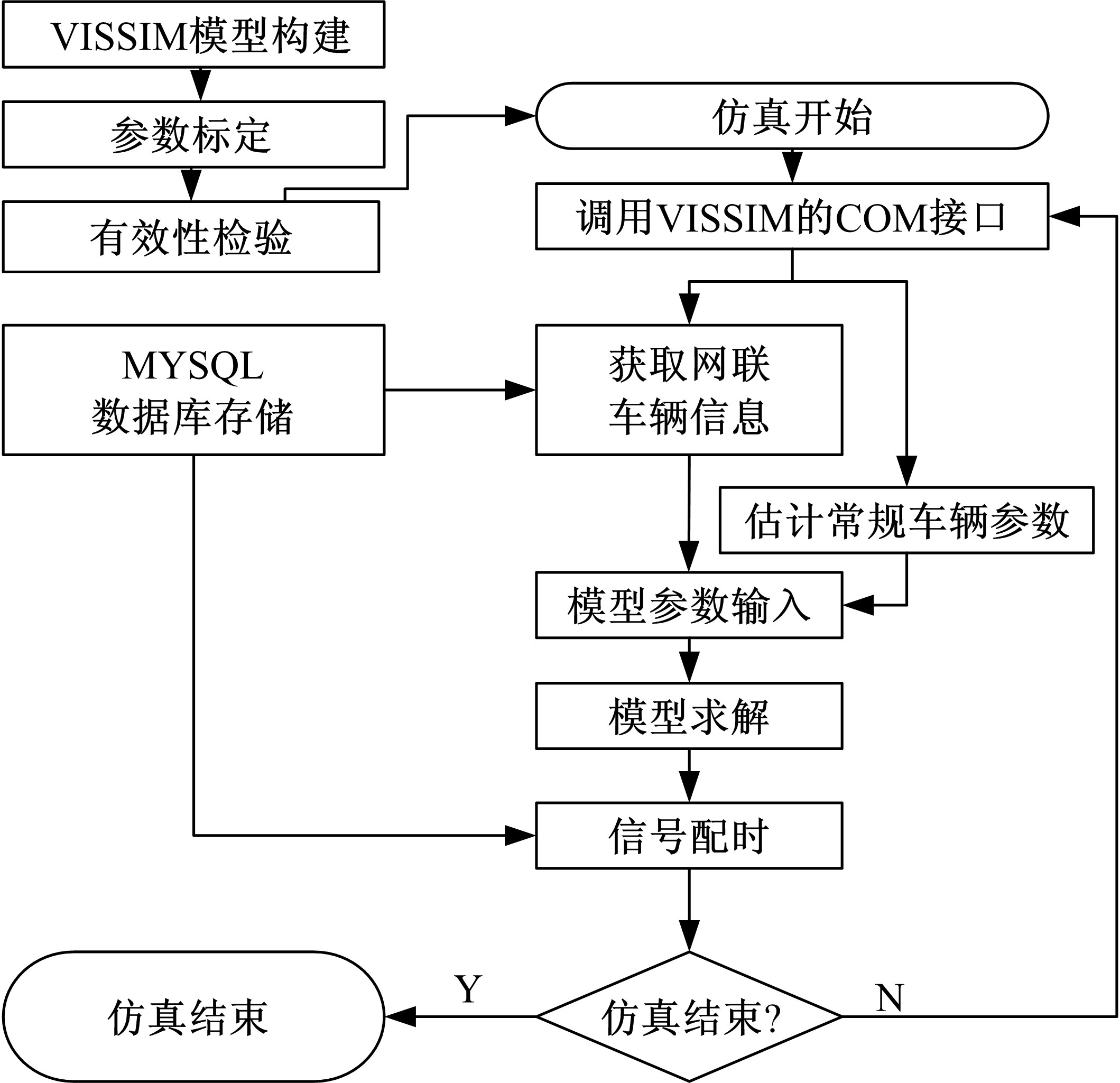
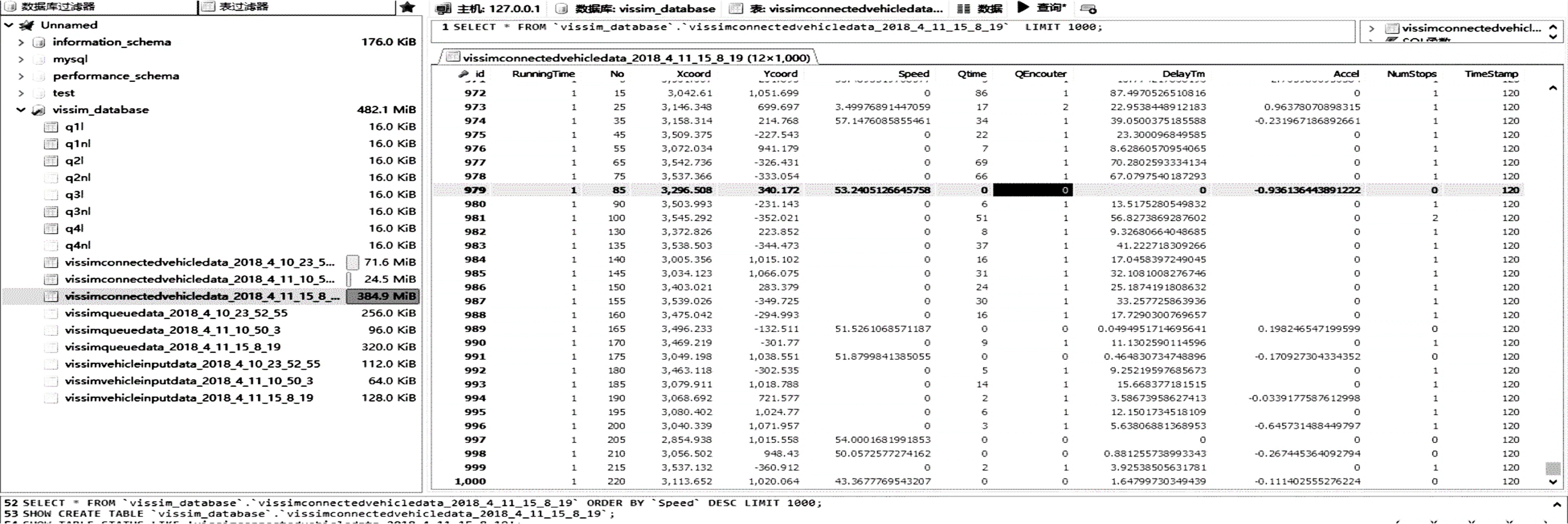
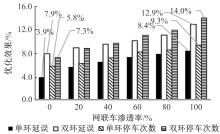
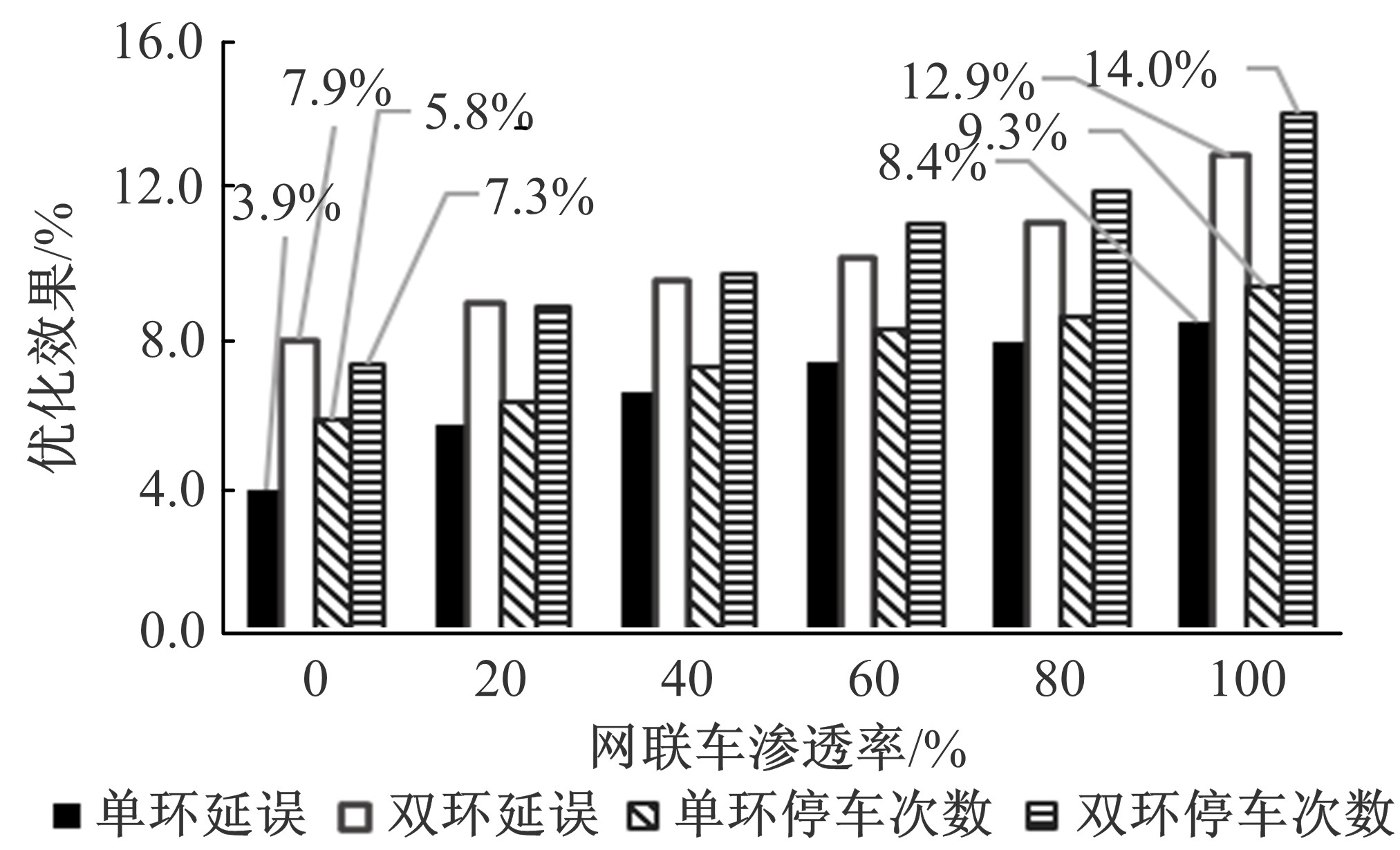
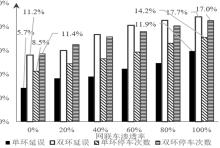
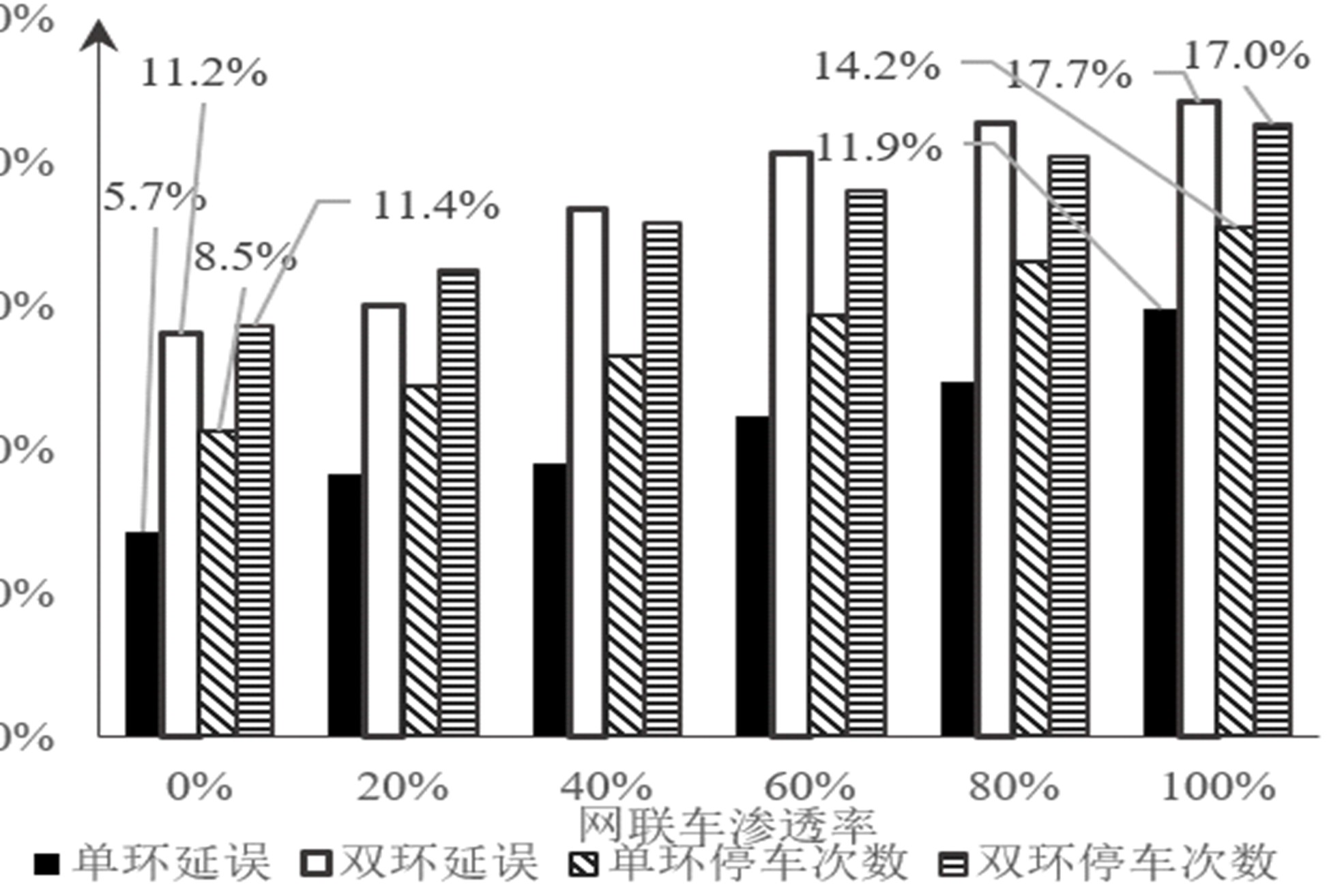
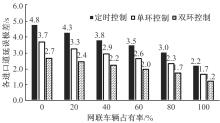
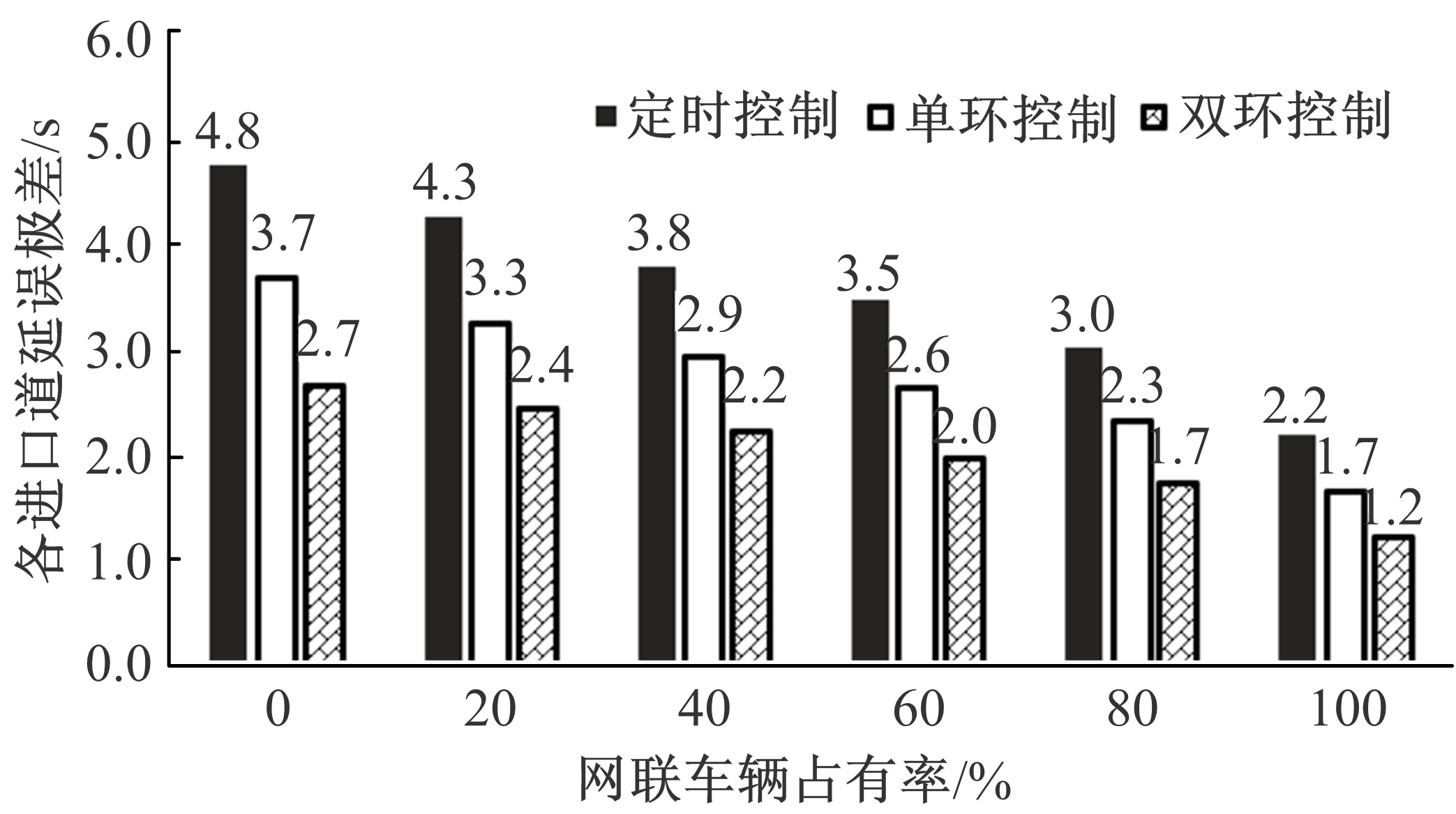
面向智能网联环境交叉口,提出一种双环自适应信号控制方法。首先,建立并标定智能网联车辆与常规车辆跟驰模型;然后以延误和停车次数为优化目标,考虑绿灯最小时长约束,使用NEMA双环相位结构中相位组时长为变量建模计算最优相位组时长;最后,基于微观仿真进行实验。结果表明:在不同饱和度下,相比定时式控制,双环信号控制方法延误减少7.9%~17.7%,停车次数减少7.3%~17.0%。网联环境下双环自适应控制模型优化效果随饱和度、网联车辆渗透率的增加而增加。
中图分类号:
- U491


| 1 | NHTSA. Automated vehicles for safety[EB/OL]. [2019-12-11]. |
| 2 | Hu J, Park B, Lee Y, et al. Coordinated transit signal priority supporting transit progression under connected vehicle technology[J]. Transportation Research Part C-emerging Technologies, 2015, 55(Sup.1): 393-408. |
| 3 | Li Z, Elefteriadou L, Ranka S, et al. Signal control optimization for automated vehicles at isolated signalized intersections[J]. Transportation Research Part C—Emerging Technologies, 2014, 49(12): 1-18. |
| 4 | Guler S I, Menendez M, Meier L, et al. Using connected vehicle technology to improve the efficiency of intersections[J]. Transportation Research Part C—Emerging Technologies, 2014, 46(9): 121-131. |
| 5 | 冉斌, 谭华春, 张健, 等. 智能网联交通技术发展现状及趋势[J]. 汽车安全与节能学报, 2018, 9(2): 119-130. |
| Ran Bin, Tan Hua-chun, Zhang Jian, et al. Development status and trend of connected automated vehicle highway system[J]. Journal of Automotive Safety and Energy, 2018, 9(2): 119-130. | |
| 6 | Zhang J, Dong S Y, Li Z B, et al. An eco-driving signal control model for divisible electric platoons in cooperative vehicle-infrastructure systems[J]. IEEE Access, 2019, 7: 83277-83285. |
| 7 | 林培群, 卓福庆, 姚凯斌, 等.车联网环境下交叉口交通流微观控制模型及其求解与仿真[J].中国公路学报, 2015, 28(8): 82-90. |
| Lin Pei-qun, Zhuo Fu-qing, Yao Kai-bin, et al. Solving and simulation of microcosmic control model of intersection traffic flow in connected-vehicle network environment[J]. China Journal of Highway and Transport, 2015, 28(8): 82-90. | |
| 8 | Meng Y, Li L, Wang F Y, et al. Analysis of cooperative driving strategies for non-signalized intersections[J]. IEEE Transactions on Vehicular Technology, 2017, 67(4): 2900-2911. |
| 9 | 李烨, 王炜, 邢璐, 等.自动巡航与可变限速协同控制对高速公路基本路段通行效率的改善[J]. 吉林大学学报: 工学版, 2017, 47(5): 1420-1425. |
| Li Ye, Wang Wei, Xing Lu, et al. Improving traffic efficiency of highway by integration of adaptive cruise control and variable speed limit control[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(5): 1420-1425. | |
| 10 | Do W, Rouhani O M, Mirandamoreno L F, et al. Simulation-based connected and automated vehicle models on highway sections: a literature review[J]. Journal of Advanced Transportation, 2019, 26(4): 1-14. |
| 11 | Papadoulis A, Quddus M A, Imprialou M, et al. Evaluating the safety impact of connected and autonomous vehicles on motorways[J]. Accident Analysis & Prevention, 2019, 124(3): 12-22. |
| 12 | Rahman S, Abdelaty M, Lee J, et al. Safety benefits of arterials' crash risk under connected and automated vehicles[J]. Transportation Research Part C—Emerging Technologies, 2019, 100(3): 354-371. |
| 13 | 姚荣涵, 刘美妮, 徐洪峰.信号控制交叉口车均延误模型适用性分析[J]. 吉林大学学报: 工学版, 2016, 46(2): 390-398. |
| Yao Rong-han, Liu Mei-ni, Xu Hong-feng. Applicability analysis of vehicle delay models for isolated signalized intersection[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(2): 390-398. |
| [1] | 王殿海,沈辛夷,罗小芹,金盛. 车均延误最小情况下的相位差优化方法[J]. 吉林大学学报(工学版), 2021, 51(2): 511-523. |
| [2] | 宋现敏,张明业,李振建,王鑫,张亚南. 动态公交专用道的设置及其仿真分析评价[J]. 吉林大学学报(工学版), 2020, 50(5): 1677-1686. |
| [3] | 贾洪飞,丁心茹,杨丽丽. 城市潮汐车道优化设计的双层规划模型[J]. 吉林大学学报(工学版), 2020, 50(2): 535-542. |
| [4] | 尹超英,邵春福,王晓全,熊志华. 考虑空间异质性的建成环境对通勤方式选择的影响[J]. 吉林大学学报(工学版), 2020, 50(2): 543-548. |
| [5] | 张大伟,祝海涛. 考虑行人差异性的人群疏散最优决策理论模型[J]. 吉林大学学报(工学版), 2020, 50(2): 549-556. |
| [6] | 常玉林,袁才鸿,孙超,张鹏. 基于改进元胞传输模型的城市路网实际阻抗计算方法[J]. 吉林大学学报(工学版), 2020, 50(1): 132-139. |
| [7] | 宗长富,文龙,何磊. 基于欧几里得聚类算法的三维激光雷达障碍物检测技术[J]. 吉林大学学报(工学版), 2020, 50(1): 107-113. |
| [8] | 隋振,姜源. 基于MIMO类脑情感学习回路的横-纵向综合控制驾驶员模型[J]. 吉林大学学报(工学版), 2020, 50(1): 140-146. |
| [9] | 别一鸣,姜凯,汤茹茹,王琳虹,熊昕宇. 考虑方案过渡影响的单点交通控制时段划分方法[J]. 吉林大学学报(工学版), 2019, 49(6): 1844-1851. |
| [10] | 谷远利, 张源, 芮小平, 陆文琦, 李萌, 王硕. 基于免疫算法优化LSSVM的短时交通流预测[J]. 吉林大学学报(工学版), 2019, 49(6): 1852-1857. |
| [11] | 程国柱, 冯思鹤, 冯天军. 占用车行道的路内停车泊位设置条件[J]. 吉林大学学报(工学版), 2019, 49(6): 1858-1864. |
| [12] | 龙海波,杨家其,赵学彧. 基于转运延误风险的多方式协同货运载运工具配置优化[J]. 吉林大学学报(工学版), 2019, 49(5): 1492-1499. |
| [13] | 别一鸣,汤茹茹,王运豪,文斌,冯天军,王琳虹. 信号交叉口进口车道饱和流率估计方法[J]. 吉林大学学报(工学版), 2019, 49(5): 1459-1464. |
| [14] | 曲大义,贾彦峰,刘冬梅,杨晶茹,王五林. 考虑多特性因素的路网交叉口群动态划分方法[J]. 吉林大学学报(工学版), 2019, 49(5): 1478-1483. |
| [15] | 梁泉,翁剑成,周伟,荣建. 基于关联规则的公共交通通勤稳定性人群辨识[J]. 吉林大学学报(工学版), 2019, 49(5): 1484-1491. |
|
||