吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (1): 107-113.doi: 10.13229/j.cnki.jdxbgxb20181242
• 交通运输工程·土木工程 • 上一篇
基于欧几里得聚类算法的三维激光雷达障碍物检测技术
宗长富( ),文龙,何磊()
),文龙,何磊()
- 吉林大学 汽车仿真与控制国家重点实验室,长春 130022
Object detection based on Euclidean clustering algorithm with 3D laser scanner
Chang-fu ZONG(),Long WEN,Lei HE()
- State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130022, China
摘要:
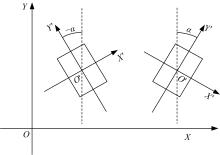
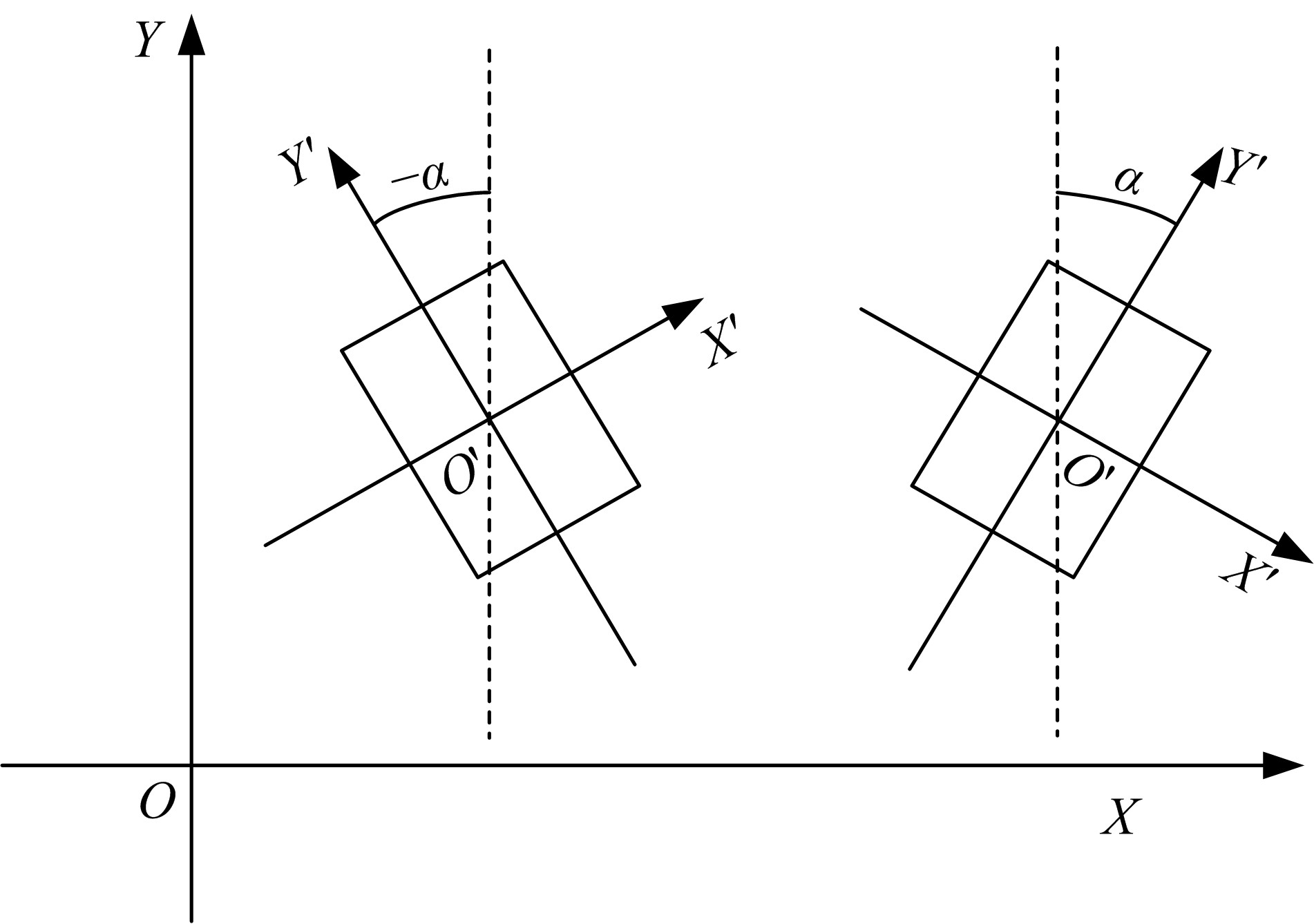
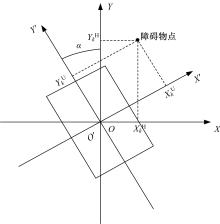
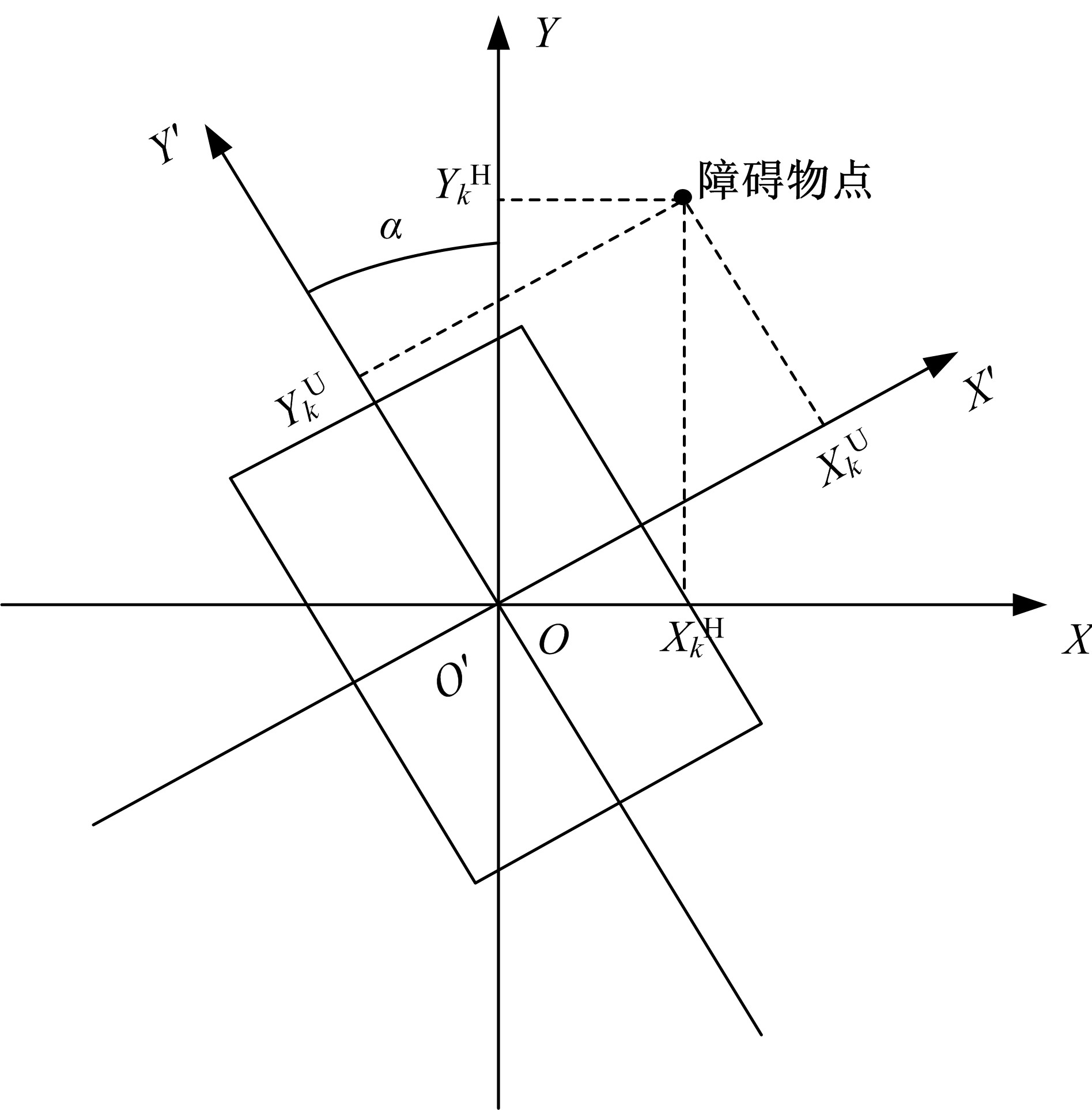
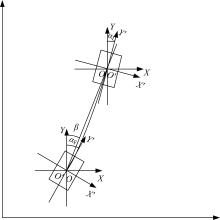
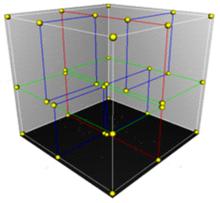
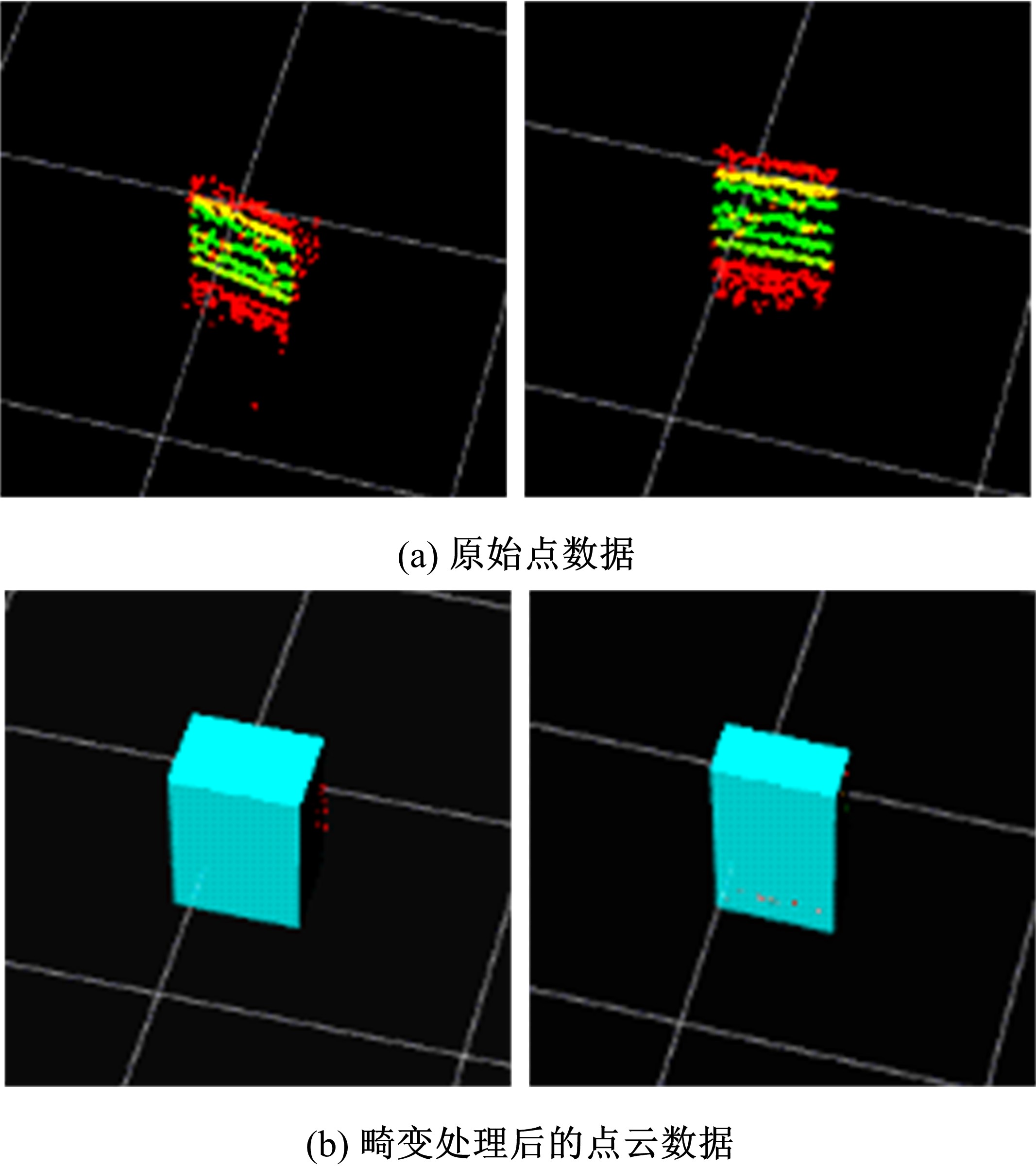
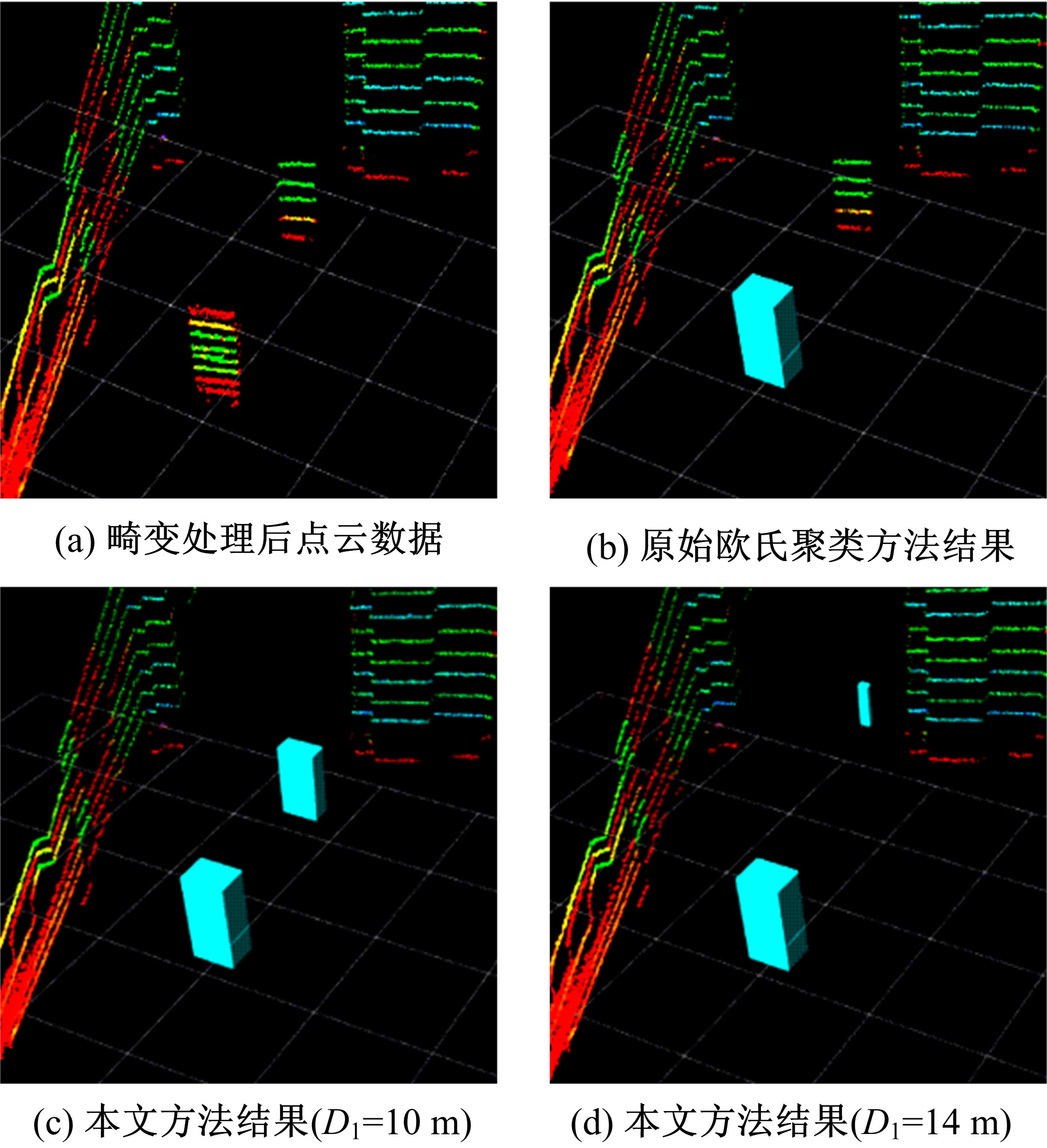
利用三维激光雷达对车辆前方障碍物进行辨识过程中,车辆的运动导致点云数据出现畸变,传统欧氏聚类方法也无法同时对远处和近处的障碍物进行精确检测,从而导致错误的聚类结果,容易出现障碍物误检或漏检的情况。针对上述问题,提出了一种对三维激光雷达点云数据去畸变的方法,同时改进了欧氏聚类方法,使其能自动更正距离阈值,从而使障碍物检测更加快速准确。对本文方法进行了实车试验,试验结果表明:本方法能同时快速准确地检测出较近和较远的障碍物。
中图分类号:
- U41







| 1 | 冯少荣, 肖文俊. DBSCAN聚类算法的研究与改进[J].中国矿业大学学报, 2008, 37(1): 105-111. |
| Feng Shao-rong, Xiao Wen-jun. An improved DBSCAN clustering algorithm[J]. Journal of China University of Mining and Technology, 2008, 37(1): 105-111. | |
| 2 | 孔栋, 王晓原. 基于车载32线激光雷达点云的车辆目标识别算法[J]. 科学技术与工程, 2018, 18(5): 81-85. |
| Kong Dong, Wang Xiao-yuan. Vehicle target identification algorithm based on poin cloud of vehicle 32-line laser lidar[J]. Science Technology and Engineering, 2018, 18(5): 81-85. | |
| 3 | 陈向阳, 杨洋. 欧氏聚类算法支持下的点云数据分割[J]. 测绘通报, 2017, (11): 27-31, 36. |
| Chen Xiang-yang, Yang Yang. Measurement of point cloud data segmentation based on Euclidean clustering algorithm[J]. Bulletin of Surveying and Mapping, 2017, (11): 27-31, 36. | |
| 4 | 王新竹, 李骏, 李红建, 等. 基于三维激光雷达和深度图像的自动驾驶汽车障碍物检测方法[J]. 吉林大学学报:工学版, 2016, 46(2): 360-365. |
| Wang Xin-zhu, Li Jun, Li Hong-jian, et al. Obstacle detection based on 3D laser scanner and range image for intelligent vehicle[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(2): 360-365. | |
| 5 | 周水庚, 周傲英, 曹晶, 等. 基于数据分区的DBSCAN算法[J]. 计算机研究与发展, 2000, 37(10): 1153-1159. |
| Zhou Shui-geng, Zhou Ao-ying, Cao Jing, et al. A data-partitioning-based DBSCAN algorithm[J]. Journal of Computer Research and Development, 2000, 37(10): 1153-1159. | |
| 6 | 林辉. 基于车载多激光雷达的地图构建与障碍物检测[D]. 浙江:浙江大学信息与电子工程学院, 2017. |
| Lin Hui. The lidar based obstacle detecion and map building[D]. Hanzhou: College of Information Science and Electronic Engineering, Zhejiang University, 2017. | |
| 7 | Lehtomaki M, Jaakkola A, Hyyppa J, et al. Object classification and recognition from mobile laser scanning point clouds in a road environment[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(2): 1226-1239. |
| 8 | 薛连杰, 齐臣坤, 张彪, 等. 基于3维点云欧氏聚类和RANSAC边界拟合的目标物体尺寸和方位识别[J]. 机械设计与研究, 2018, 34(5): 44-48, 53. |
| Xue Lian-jie, Qi Chen-kun, Zhang Biao, et al. Object size and orientation recognition based on 3D point cloud euclidean clustering and RANSAC boundary fitting[J]. Machine Design and Research, 2018, 34(5): 44-48, 53. | |
| 9 | 刘如松. 基于样本间最小欧氏距离的多特征融合识别算法研究[J]. 计算机与数字工程, 2017, 45(12): 2373-2378. |
| Liu Ru-song. Research on multi-feature fusion recognition algorithm based on minimum Euclidean distance between samples[J]. Computer and Digital Engineering, 2017, 45(12): 2373-2378. | |
| 10 | 王育坚, 廉腾飞,吴明明, 等. 基于八叉树与KD树索引的点云配准方法[J]. 测绘工程, 2017, 26(8): 35-40. |
| Wang Yu-jian, Lian Teng-fei, Wu Ming-ming, et al. Point cloud registration based on octree and KD-tree index[J]. Engineering of Surveying and Mapping, 2017, 26(8): 35-40. | |
| 11 | 陈贵宾, 高振海, 何磊. 车载三维激光雷达外参数的分步自动标定算法[J]. 中国激光, 2017, 44(10): 1010004 |
| Chen Gui-bin, Gao Zhen-hai, He Lei. Step-by-step automatic calibation algorithm for exterior parameters of 3D lidar mounted on vehicle[J]. Chinese Journal of Lasers, 2017, 44(10): 1010004. |
| [1] | 谷远利, 张源, 芮小平, 陆文琦, 李萌, 王硕. 基于免疫算法优化LSSVM的短时交通流预测[J]. 吉林大学学报(工学版), 2019, 49(6): 1852-1857. |
| [2] | 别一鸣,姜凯,汤茹茹,王琳虹,熊昕宇. 考虑方案过渡影响的单点交通控制时段划分方法[J]. 吉林大学学报(工学版), 2019, 49(6): 1844-1851. |
| [3] | 程国柱, 冯思鹤, 冯天军. 占用车行道的路内停车泊位设置条件[J]. 吉林大学学报(工学版), 2019, 49(6): 1858-1864. |
| [4] | 梁泉,翁剑成,周伟,荣建. 基于关联规则的公共交通通勤稳定性人群辨识[J]. 吉林大学学报(工学版), 2019, 49(5): 1484-1491. |
| [5] | 龙海波,杨家其,赵学彧. 基于转运延误风险的多方式协同货运载运工具配置优化[J]. 吉林大学学报(工学版), 2019, 49(5): 1492-1499. |
| [6] | 别一鸣,汤茹茹,王运豪,文斌,冯天军,王琳虹. 信号交叉口进口车道饱和流率估计方法[J]. 吉林大学学报(工学版), 2019, 49(5): 1459-1464. |
| [7] | 吴文静,陈润超,贾洪飞,罗清玉,孙迪. 车路协同环境下路段掉头区域车辆协同控制[J]. 吉林大学学报(工学版), 2019, 49(4): 1100-1106. |
| [8] | 江亮,贺宜. 电动两轮车风险驾驶行为及事故影响因素分析[J]. 吉林大学学报(工学版), 2019, 49(4): 1107-1113. |
| [9] | 曲昭伟,潘昭天,陈永恒,陶鹏飞,孙迪. 基于最优速度模型的改进安全距离跟驰模型[J]. 吉林大学学报(工学版), 2019, 49(4): 1092-1099. |
| [10] | 陈磊,王江锋,谷远利,闫学东. 基于思维进化优化的多源交通数据融合算法[J]. 吉林大学学报(工学版), 2019, 49(3): 705-713. |
| [11] | 凃强,程琳,林芬,孙超. 考虑出行者风险态度的最优路径搜索[J]. 吉林大学学报(工学版), 2019, 49(3): 720-726. |
| [12] | 曹宁博,赵利英,曲昭伟,陈永恒,白乔文,邓晓磊. 考虑双向行人跟随行为的社会力模型[J]. 吉林大学学报(工学版), 2019, 49(3): 688-694. |
| [13] | 尹超英,邵春福,王晓全. 考虑停车可用性的建成环境对小汽车通勤出行的影响[J]. 吉林大学学报(工学版), 2019, 49(3): 714-719. |
| [14] | 罗小芹,王殿海,金盛. 面向混合交通的感应式交通信号控制方法[J]. 吉林大学学报(工学版), 2019, 49(3): 695-704. |
| [15] | 李志慧,钟涛,赵永华,胡永利,李海涛,赵景伟. 面向车辆自主驾驶的行人跟踪算法[J]. 吉林大学学报(工学版), 2019, 49(3): 680-687. |
|
||