吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (6): 2154-2163.doi: 10.13229/j.cnki.jdxbgxb20200671
• 计算机科学与技术 • 上一篇
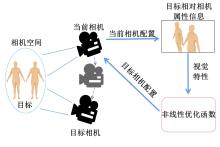
基于电影视觉特性的动态多目标实时相机规划
林俊聪( ),雷钧,陈萌,郭诗辉(),高星,廖明宏
),雷钧,陈萌,郭诗辉(),高星,廖明宏
- 厦门大学 信息学院,福建 厦门 361005
Real⁃time camera planning for dynamic multiple targets considering cinematographic visual properties
Jun-cong LIN(),Jun LEI,Meng CHEN,Shi-hui GUO(),Xing GAO,Ming-hong LIAO
- School of Informatics,Xiamen University,Xiamen 361005,China
摘要:
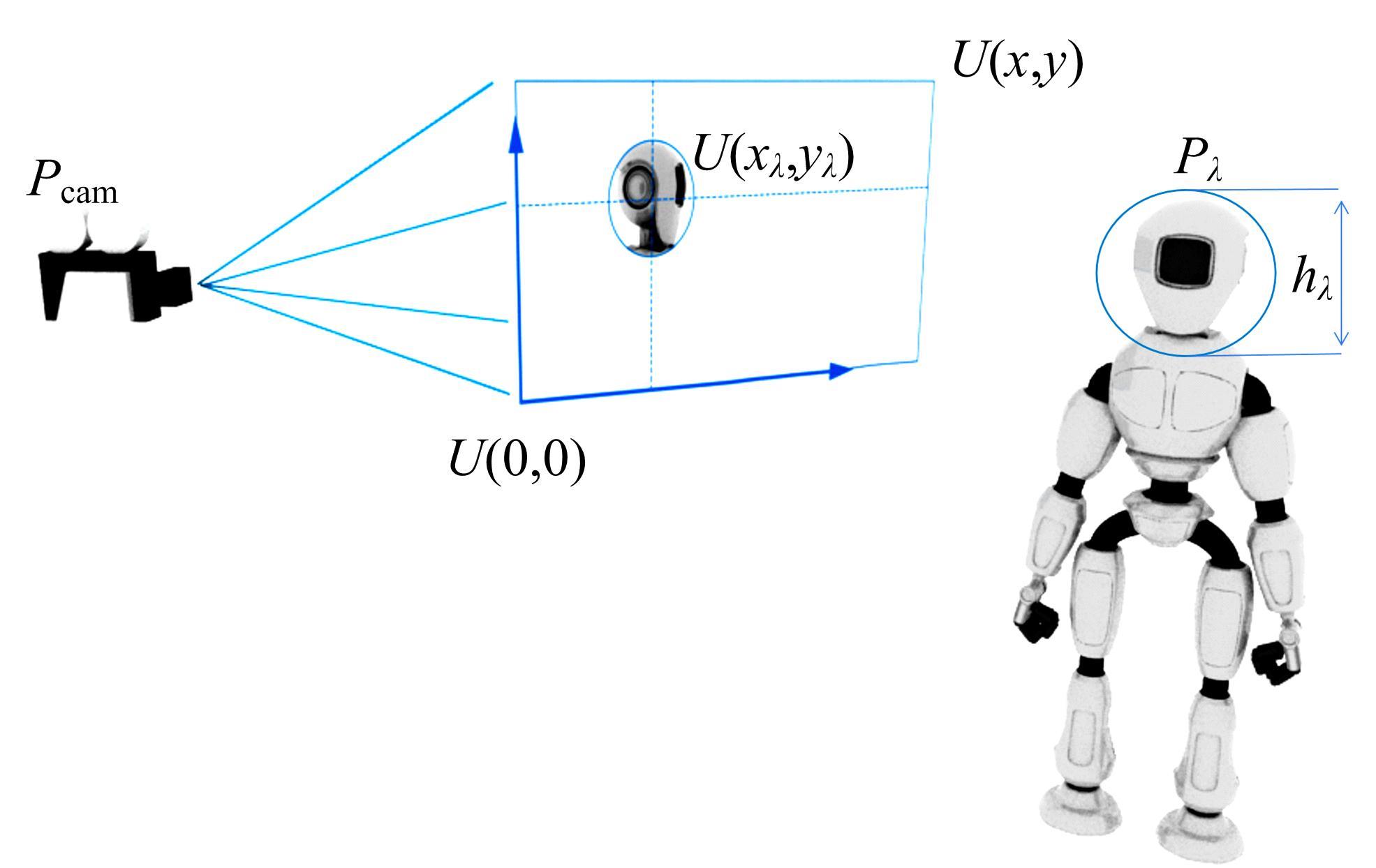
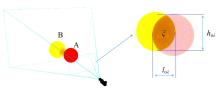
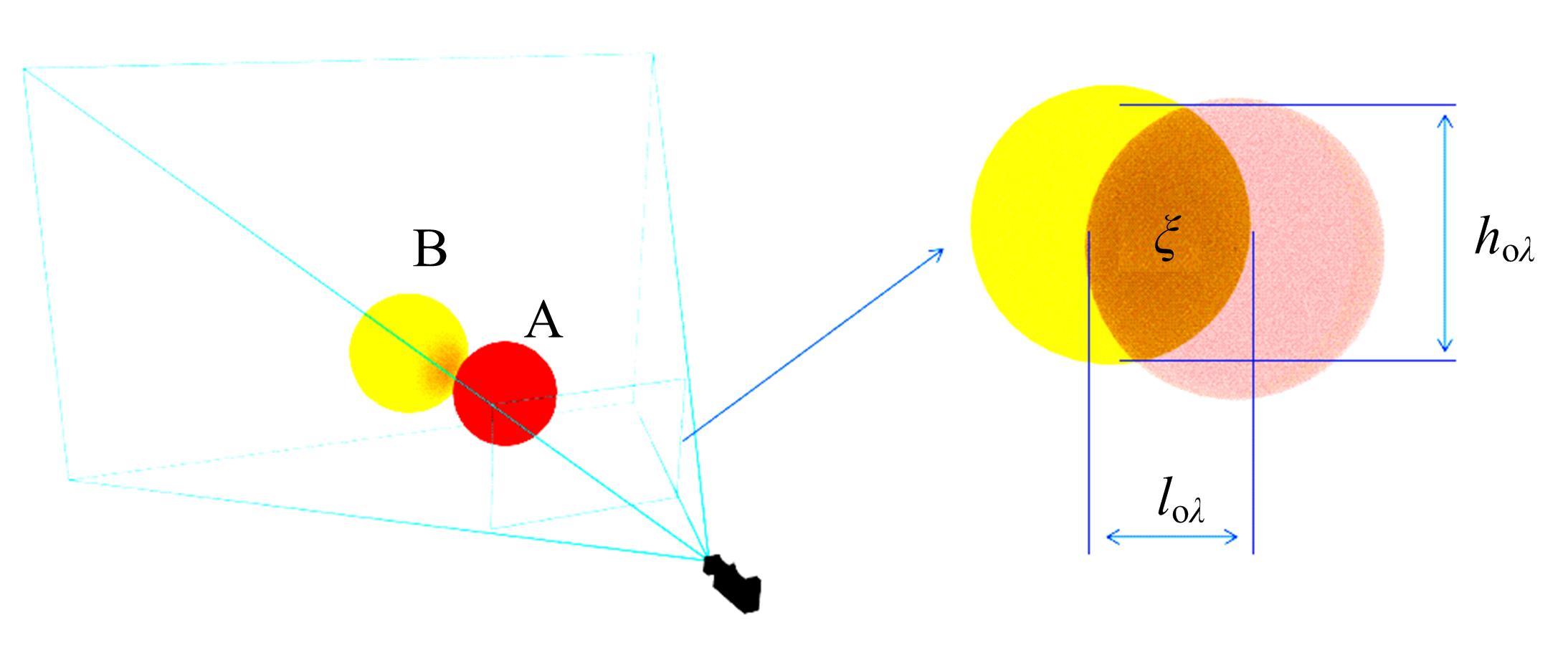
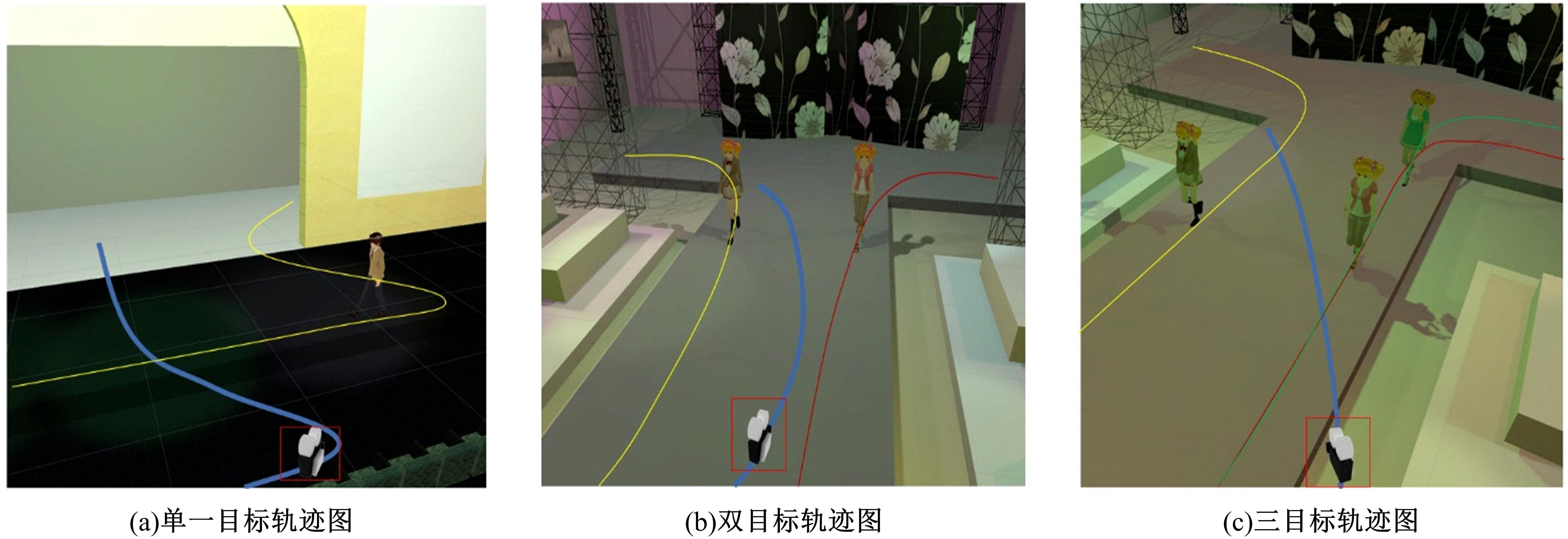
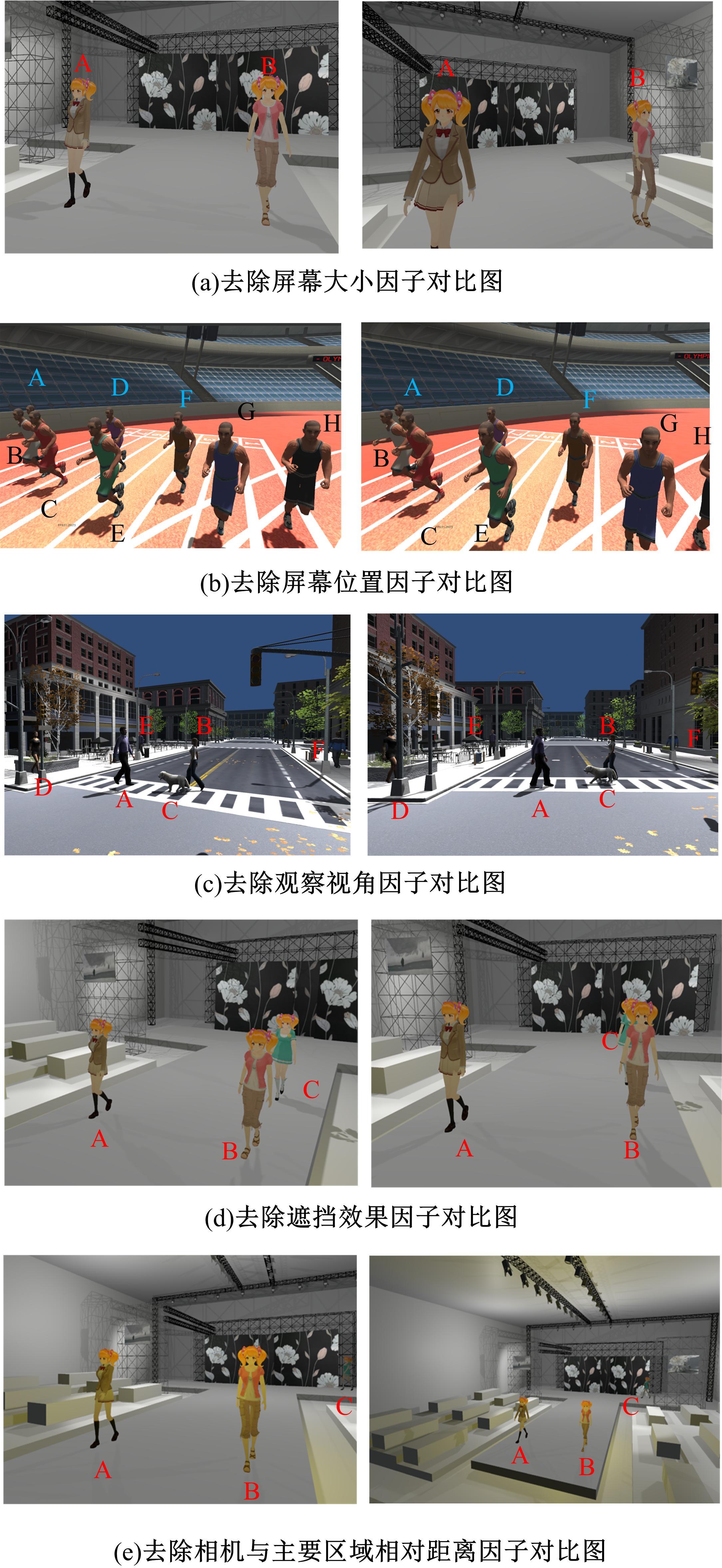
针对已有相机规划方案应对目标较少或无法做到实时性的问题,从自动实现相机视觉效果优化的角度出发,提出了一种对于动态多目标的实时相机规划方法。首先,通过在多个目标之间构造椭球形的相机空间;之后,获取场景中各目标相对相机的视觉特性,以此来构造非线性规划优化函数。通过模型预测控制的方法对目标在相机屏幕上的表现进行实时优化。通过对算法的运算时间、运行效率以及在场景中的运行表现进行实验,验证了本文方法能够有效地优化场景中各目标的视觉效果,对多目标相机规划问题的研究有一定促进作用。
中图分类号:
- TP391










| 1 | Galvane Q, Lino C, Christie M, et al. Directing cinematographic drones[J]. ACM Transactions on Graphics, 2018, 37(3):1-18. |
| 2 | Dong S, Xu K, Zhou Q, et al. Multi-robot collaborative dense scene reconstruction[J]. ACM Transactions on Graphics, 2019, 38(4):1-16. |
| 3 | Xu K, Shi Y, Zheng L, et al. 3D attention-driven depth acquisition for object identification[J]. ACM Transactions on Graphics, 2016, 35(6):1-14. |
| 4 | Lino C, Christie M. Intuitive and efficient camera control with the toric space[J]. ACM Transactions on Graphics, 2015, 34(4): No.82. |
| 5 | Galvane Q, Christie M, Lino C, et al. Camera-on-rails: auto-mated computation of constrained camera paths[C]∥Proceedings of the 8th ACM SIGGRAPH Conference on Motion in Games, Paris, France, 2015: 151-157. |
| 6 | Assa J, Caspi Y,Cohen-Or D. Action synopsis: pose selection and illustration[J]. ACM Transactions on Graphics, 2005, 24(3): 667-676. |
| 7 | 任庆东, 王艺萤, 刘贤梅. 培训系统中虚拟相机运动规划[J]. 科学技术与工程, 2012, 12(8):1936-1940. |
| Ren Qing-dong, Wang Yi-ying, Liu Xian-mei. Virtual camera motion planning in the simulation training system[J]. Science Technology and Engineering, 2012, 12(8): 1936-1940. | |
| 8 | Yeh I C, Lin W C, Lee T Y, et al. Social-event-driven camera control for multicharacter animations[J]. IEEE Transactions on Visualization & Computer Graphics, 2012, 18(9): 1496-1510. |
| 9 | Li T Y, Xiao X Y. An interactive camera planning system for automatic cinematographer[C]∥Proceedings of 11th International Multimedia Modelling Conference, Melbourne, Australia, 2005: 310-315. |
| 10 | Nägeli T, Meier L, Domahidi A, et al. Real-time planning for automated multi-view drone cinematography[J]. ACM Transactions on Graphics, 2017, 36(4): 1-10. |
| 11 | Nägeli T, Alonso-Mora J, Domahidi A, et al. Real-time motion planning for aerial videography with dynamic obstacle avoidance and viewpoint optimization[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1696-1703. |
| 12 | 丛岩峰, 安向京, 陈虹, 等. 基于滚动优化原理的类车机器人路径跟踪控制[J]. 吉林大学学报:工学版, 2012, 42(1): 182-187. |
| Cong Yan-feng, An Xiang-jing, Chen Hong, et al. Path following control of car-like robot based on rolling windows[J]. Journal of Jilin University(Engineering and Technology Edition), 2012, 42(1): 182-187. | |
| 13 | 张家旭,王欣志,赵健,等. 汽车高速换道避让路径规划及离散滑模跟踪控制[J]. 吉林大学学报:工学版, 2021, 51(3): 1081-1090. |
| Zhang Jia-xu, Wang Xin-zhi, Zhao Jian, et al. Path planning and discrete sliding mode tracking control for high⁃speed lane changing collision avoidance of vehicle[J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1081-1090. | |
| 14 | Lino C, Christie M. Efficient composition for virtual camera control[C]∥Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation, Lausanne, Switzerland, 2012: 65-70. |
| 15 | Gardner J S, Fowlkes C, Nothelfer C, et al. Exploring aesthetic principles of spatial composition through stock photography[J]. Journal of Vision, 2010, 8(6): 337. |
| 16 | Ma Shuang, Fan Yang-yu, Chen Chang-wen. Finding your spot: a photography suggestion system for placing human in the scene[C]∥Proceedings of IEEE International Conference on Image Processing, Paris, France, 2014: 556-560. |
| [1] | 曹洁,屈雪,李晓旭. 基于滑动特征向量的小样本图像分类方法[J]. 吉林大学学报(工学版), 2021, 51(5): 1785-1791. |
| [2] | 孙小雪,钟辉,陈海鹏. 基于决策树分类技术的学生考试成绩统计分析系统[J]. 吉林大学学报(工学版), 2021, 51(5): 1866-1872. |
| [3] | 张萌谡,刘春天,李希今,黄永平. 基于K⁃means聚类算法的绩效考核模糊综合评价系统设计[J]. 吉林大学学报(工学版), 2021, 51(5): 1851-1856. |
| [4] | 姚引娣,贺军瑾,李杨莉,谢荡远,李英. 自构建改进型鲸鱼优化BP神经网络的ET0模拟计算[J]. 吉林大学学报(工学版), 2021, 51(5): 1798-1807. |
| [5] | 赵宏伟,张子健,李蛟,张媛,胡黄水,臧雪柏. 基于查询树的双向分段防碰撞算法[J]. 吉林大学学报(工学版), 2021, 51(5): 1830-1837. |
| [6] | 王春波,底晓强. 基于标签分类的云数据完整性验证审计方案[J]. 吉林大学学报(工学版), 2021, 51(4): 1364-1369. |
| [7] | 欧阳丹彤,刘扬,刘杰. 故障响应指导下基于测试集的故障诊断方法[J]. 吉林大学学报(工学版), 2021, 51(3): 1017-1025. |
| [8] | 钱榕,张茹,张克君,金鑫,葛诗靓,江晟. 融合全局和局部特征的胶囊图神经网络[J]. 吉林大学学报(工学版), 2021, 51(3): 1048-1054. |
| [9] | 朱小龙,谢忠. 基于机器学习的地理空间数据抽取算法[J]. 吉林大学学报(工学版), 2021, 51(3): 1011-1016. |
| [10] | 孙宝凤,任欣欣,郑再思,李国一. 考虑工人负荷的多目标流水车间优化调度[J]. 吉林大学学报(工学版), 2021, 51(3): 900-909. |
| [11] | 刘元宁,吴迪,朱晓冬,张齐贤,李双双,郭书君,王超. 基于YOLOv3改进的用户界面组件检测算法[J]. 吉林大学学报(工学版), 2021, 51(3): 1026-1033. |
| [12] | 陈广秋,陈昱存,李佳悦,刘广文. 基于DNST和卷积稀疏表示的红外与可见光图像融合[J]. 吉林大学学报(工学版), 2021, 51(3): 996-1010. |
| [13] | 王淑敏,陈伟. 基于连续密度隐马尔可夫模型的矿下异常行为识别算法[J]. 吉林大学学报(工学版), 2021, 51(3): 1067-1072. |
| [14] | 沈淑涛,尼玛扎西. 基于区块链技术的双混沌可识篡改图像加密方法[J]. 吉林大学学报(工学版), 2021, 51(3): 1055-1059. |
| [15] | 周炳海,何朝旭. 基于静态半成套策略的多目标准时化物料配送调度[J]. 吉林大学学报(工学版), 2021, 51(3): 910-916. |
|
||