吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (5): 1850-1855.doi: 10.13229/j.cnki.jdxbgxb20190806
• 计算机科学与技术 • 上一篇
基于姿态估计算法的组件感知自适应模型
管乃彦1,2( ),郭娟利1,2
),郭娟利1,2
- 1.天津大学 建筑学院,天津 300072
2.天津大学 建筑物理环境与生态技术重点实验室,天津 300072
Component awareness adaptive model based on attitude estimation algorithms
Nai-yan GUAN1,2(),Juan-li GUO1,2
- 1.School of Architecture, Tianjin University, Tianjin 300072, China
2.Key Laboratory of Building Physical Environment and Ecological Technology, Tianjin University, Tianjin 300072, China
摘要:
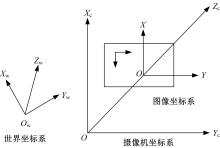
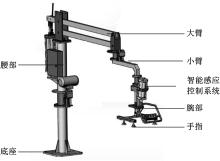
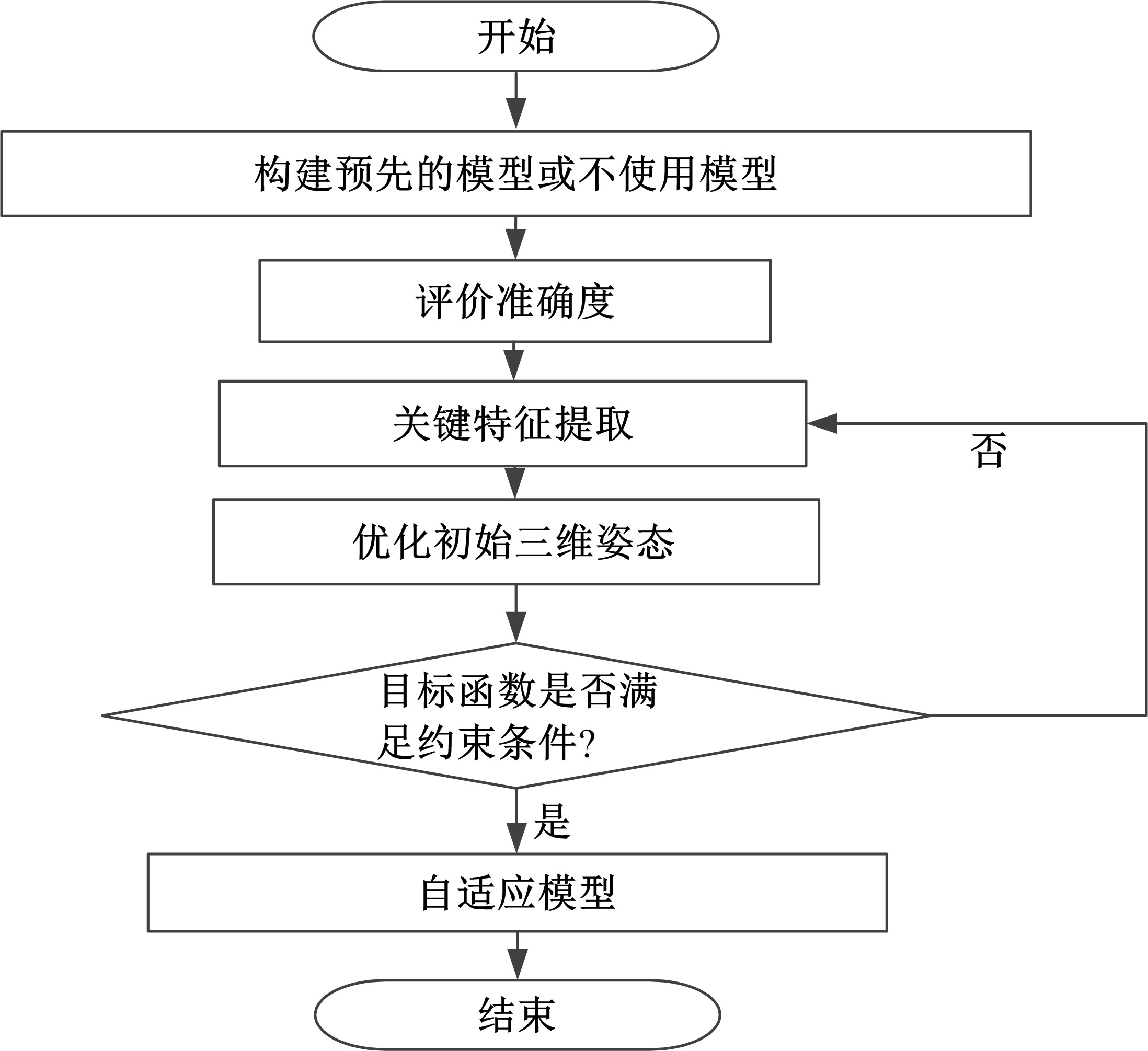
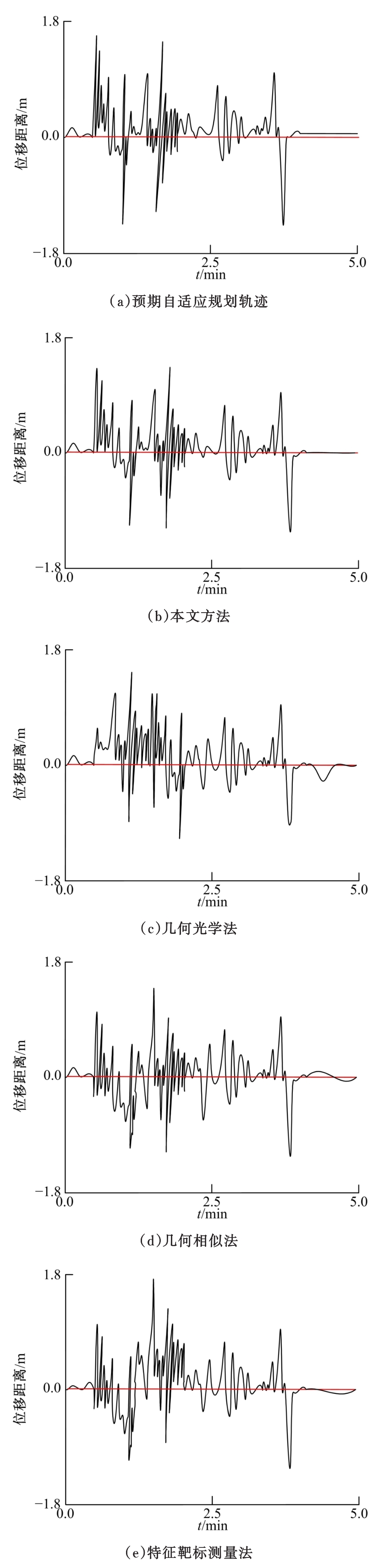
传统自适应模型采用几何光学法、几何相似法和特征靶标测量法构建完成,存在感知延时较长、自适应跟踪精度较低的问题,为此提出一种基于姿态估计算法的组件感知自适应模型。该模型的构建主要分为3部分,首先利用基于平面模版的张正友摄像机标定方法进行感应组件标定;然后建立目标物体三维模型,实现运动目标跟踪;最后利用基于模型的姿态估计方法估算目标物体的姿态实时状态,实现组件感知自适应模型的构建。结果表明:与上述3种传统模型相比,本模型自适应控制下组件感知延时缩短,自适应跟踪精度提高,改善了机械臂操作性能。
中图分类号:
- TP391






| 1 | 赵亮, 张义德, 胡旭晓. 基于网格包络的工业机器人仿真碰撞检测算法[J]. 中国机械工程, 2017, 28(3): 316-321. |
| Zhao Liang, Zhang Yi-de, Hu Xu-xiao. A novel collision detection algorithm based on grids enveloping for industrial robot simulations[J]. China Mechanical Engineering, 2017, 28(3): 316-321. | |
| 2 | 米根锁, 梁骅旗. 基于干扰观测器的机械臂非线性滑模控制[J]. 系统仿真学报, 2019, 31(9): 1935-1941. |
| Mi Gen-suo, Liang Hua-qi. Nonlinear sliding mode control for robotic manipulator based on disturbance observer[J]. Journal of System Simulation, 2019, 31(9): 1935-1941. | |
| 3 | 陈耀东, 刘琴, 彭蝶飞. 面向姿态估计的组件感知自适应算法[J]. 计算机工程, 2018, 44(11): 257-264. |
| Chen Yao-dong, Liu Qin, Peng Die-fei. Component-aware adaptive algorithm for pose estimation[J]. Computer Engineering, 2018, 44(11): 257-264. | |
| 4 | 邓君, 李川, 白云. 串联工业机器人机械臂的模块化组合式设计方法[J]. 科学技术与工程, 2018, 18(22): 66-71. |
| Deng Jun, Li Chuan, Bai Yun. Modular combined design method of mechanical arm of serial industrial robot[J]. Science Technology and Engineering, 2018, 18(22): 66-71. | |
| 5 | 王磊, 胡学东, 关英, 等. 低成本微惯性组件的复合标定与智能滤波方法[J]. 弹箭与制导学报, 2018, 38(2): 79-83, 87. |
| Wang Lei, Hu Xue-dong, Guan Ying, et al. Compounded calibration and intelligent filter method for low cost micro IMU[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2018, 38(2): 79-83, 87. | |
| 6 | 张飞, 单忠德, 任永新, 等. 缸盖缺陷检测系统线阵相机现场标定方法[J]. 吉林大学学报: 工学版, 2017, 47(2): 540-545. |
| Zhang Fei, Shan Zhong-de, Ren Yong-xin, et al. Calibration of line array camera for head defect detection system on cylinder cover[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(2): 540-545. | |
| 7 | 王凤艳, 黄润秋, 陈剑平, 等. 基于计算机视觉和测量平差理论的相机标定[J]. 吉林大学学报: 工学版, 2017, 47(3): 944-951. |
| Wang Feng-yan, Huang Run-qiu, Chen Jian-ping, et al. Camera calibration based on computer vision and surveying adjustment fundamentals[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(3): 944-951. | |
| 8 | 赵立恒. 三维景观规划图像特征增强方法仿真研究[J]. 计算机仿真, 2017, 34(12): 407-410. |
| Zhao Li-heng. Simulation research on image feature enhancement method of 3D landscape planning[J]. Computer Simulation, 2017, 34(12): 407-410. | |
| 9 | 周保余, 赵宏伟, 肖杨, 等. 基于局部熵的图像特征描述方法[J]. 吉林大学学报: 工学版, 2017, 47(2): 601-608. |
| Zhou Bao-yu, Zhao Hong-wei, Xiao Yang, et al. Image feature description method based on local entropy[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(2): 601-608. | |
| 10 | 岳丽清, 王东杰, 张京运, 等. 基于自标定技术的空间机械臂相机坐标系引出方法[J]. 光学与光电技术, 2017, 15(1): 34-38. |
| Yue Li-qing, Wang Dong-jie, Zhang Jing-yun, et al. Eduction method of space manipulator camera coordinate system based on self-calibration[J]. Optics & Optoelectronic Technology, 2017, 15(1): 34-38. | |
| 11 | 鲁鑫, 高敬东, 李开龙. 不同姿态表示方法下的姿态估计分析[J]. 舰船科学技术, 2018, 40(3): 137-141. |
| Lu Xin, Gao Jing-dong, Li Kai-long. Attitude estimation analysis under different attitude representation methods[J]. Ship Science and Technology, 2018, 40(3): 137-141. |
| [1] | 周炳海,何朝旭. 基于线边集成超市的混流装配线动态物料配送调度[J]. 吉林大学学报(工学版), 2020, 50(5): 1809-1817. |
| [2] | 赵宏伟,刘晓涵,张媛,范丽丽,龙曼丽,臧雪柏. 基于关键点注意力和通道注意力的服装分类算法[J]. 吉林大学学报(工学版), 2020, 50(5): 1765-1770. |
| [3] | 车翔玖,董有政. 基于多尺度信息融合的图像识别改进算法[J]. 吉林大学学报(工学版), 2020, 50(5): 1747-1754. |
| [4] | 方伟,黄羿,马新强. 基于机器学习的虚拟网络感知数据缺陷自动检测[J]. 吉林大学学报(工学版), 2020, 50(5): 1844-1849. |
| [5] | 刘洲洲,尹文晓,张倩昀,彭寒. 基于离散优化算法和机器学习的传感云入侵检测[J]. 吉林大学学报(工学版), 2020, 50(2): 692-702. |
| [6] | 王晓辉,吴禄慎,陈华伟. 基于法向量距离分类的散乱点云数据去噪[J]. 吉林大学学报(工学版), 2020, 50(1): 278-288. |
| [7] | 张笑东,夏筱筠,吕海峰,公绪超,廉梦佳. 大数据网络并行计算环境中生理数据流动态负载均衡[J]. 吉林大学学报(工学版), 2020, 50(1): 247-254. |
| [8] | 陈蔓,钟勇,李振东. 隐低秩结合低秩表示的多聚焦图像融合[J]. 吉林大学学报(工学版), 2020, 50(1): 297-305. |
| [9] | 金顺福,郄修尘,武海星,霍占强. 基于新型休眠模式的云虚拟机分簇调度策略及性能优化[J]. 吉林大学学报(工学版), 2020, 50(1): 237-246. |
| [10] | 李雄飞,王婧,张小利,范铁虎. 基于SVM和窗口梯度的多焦距图像融合方法[J]. 吉林大学学报(工学版), 2020, 50(1): 227-236. |
| [11] | 王洪雁,邱贺磊,郑佳,裴炳南. 光照变化下基于低秩稀疏表示的视觉跟踪方法[J]. 吉林大学学报(工学版), 2020, 50(1): 268-277. |
| [12] | 邓钧忆,刘衍珩,冯时,赵荣村,王健. 基于GSPN的Ad⁃hoc网络性能和安全平衡[J]. 吉林大学学报(工学版), 2020, 50(1): 255-261. |
| [13] | 王铁君,王维兰. 基于本体的唐卡图像标注方法[J]. 吉林大学学报(工学版), 2020, 50(1): 289-296. |
| [14] | 周柚,杨森,李大琳,吴春国,王岩,王康平. 基于现场可编程门电路的人脸检测识别加速平台[J]. 吉林大学学报(工学版), 2019, 49(6): 2051-2057. |
| [15] | 赵宏伟,王鹏,范丽丽,胡黄水,刘萍萍. 相似性保持实例检索方法[J]. 吉林大学学报(工学版), 2019, 49(6): 2045-2050. |
|
||