吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (4): 1437-1446.doi: 10.13229/j.cnki.jdxbgxb20200380
• 计算机科学与技术 • 上一篇
面向动态场景复合深度学习与并行计算的DG-SLAM算法
兰凤崇1,2( ),李继文1,2,陈吉清1,2()
),李继文1,2,陈吉清1,2()
- 1.华南理工大学 机械与汽车工程学院,广州 510640
2.华南理工大学 广东省汽车工程重点实验室,广州 510640
DG-SLAM algorithm for dynamic scene compound deep learning and parallel computing
Feng-chong LAN1,2(),Ji-wen LI1,2,Ji-qing CHEN1,2()
- 1.School of Mechanical & Automotive Engineering,South China University of Technology,Guangzhou 510640,China
2.Guangdong Key Laboratory of Automotive Engineering,South China University of Technology,Guangzhou 510640,China
摘要:
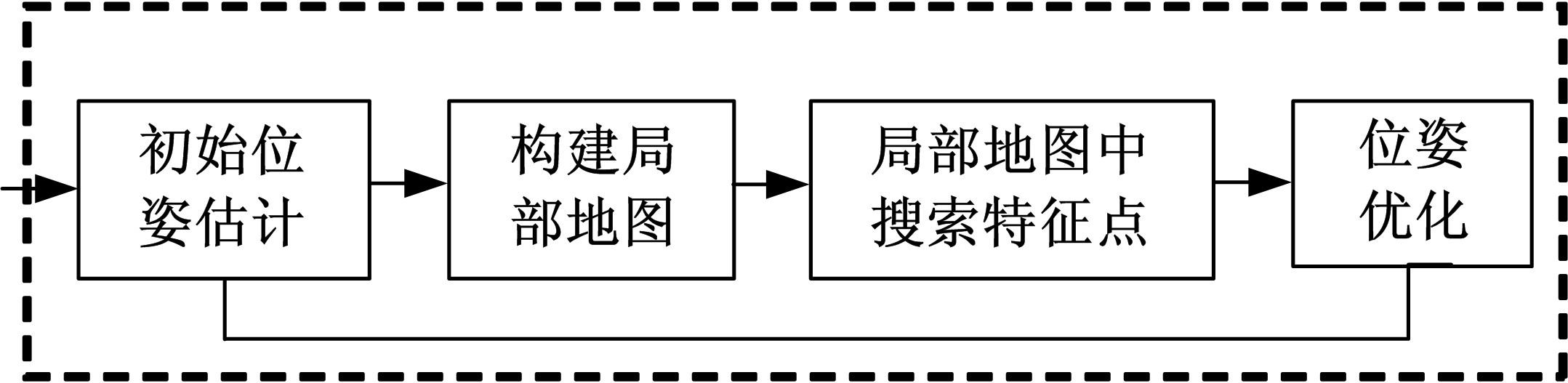
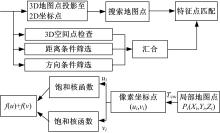
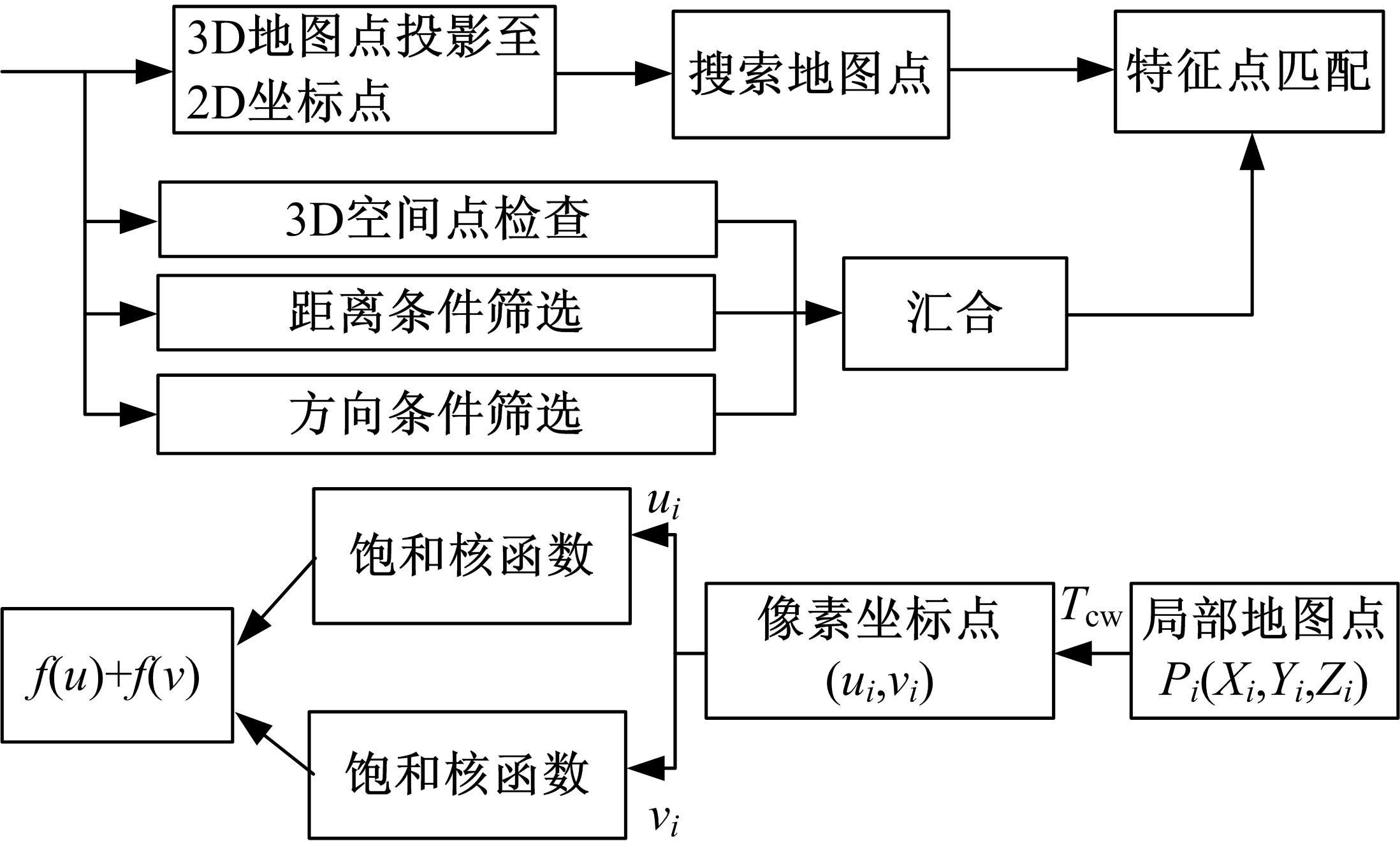
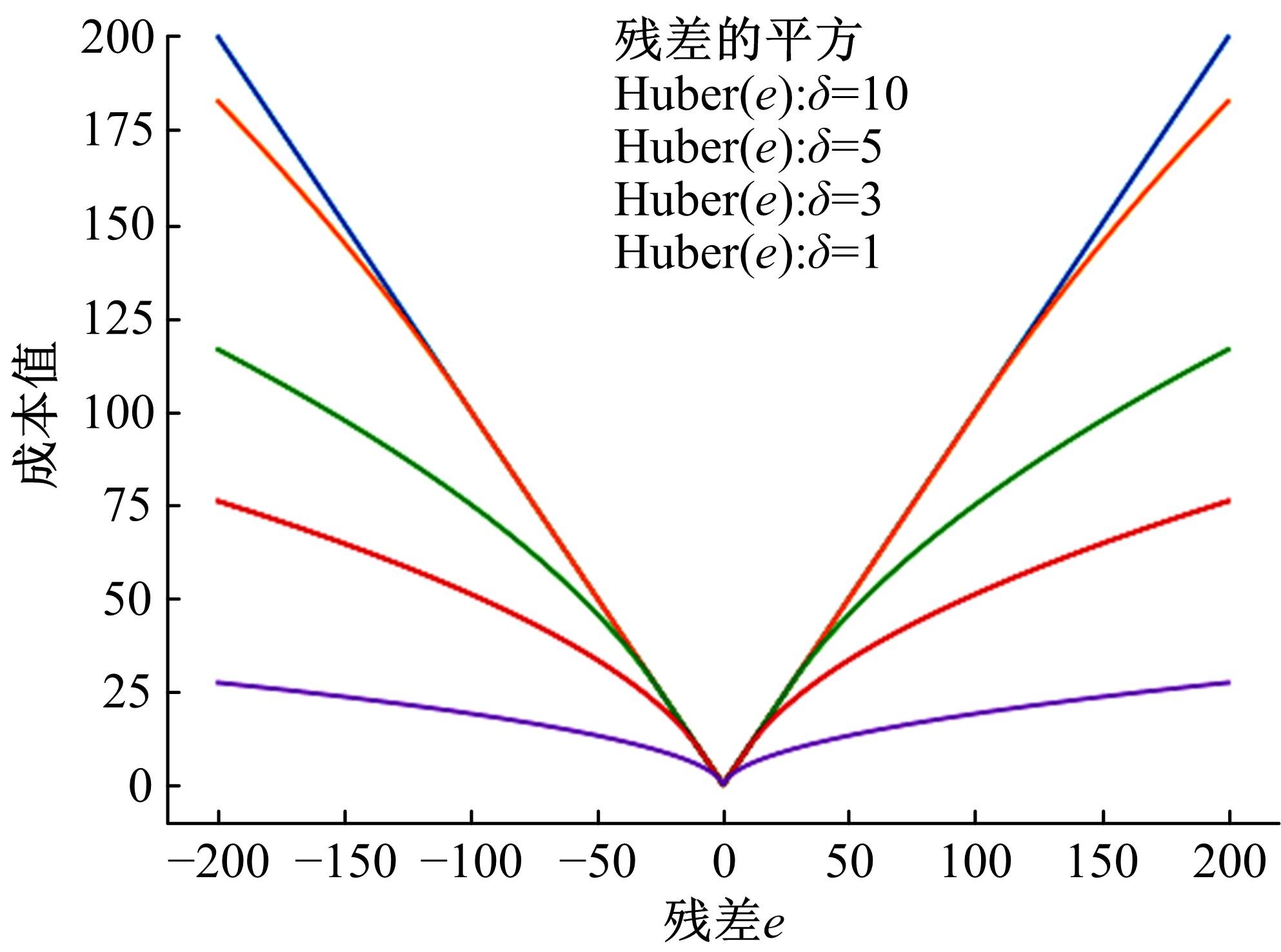
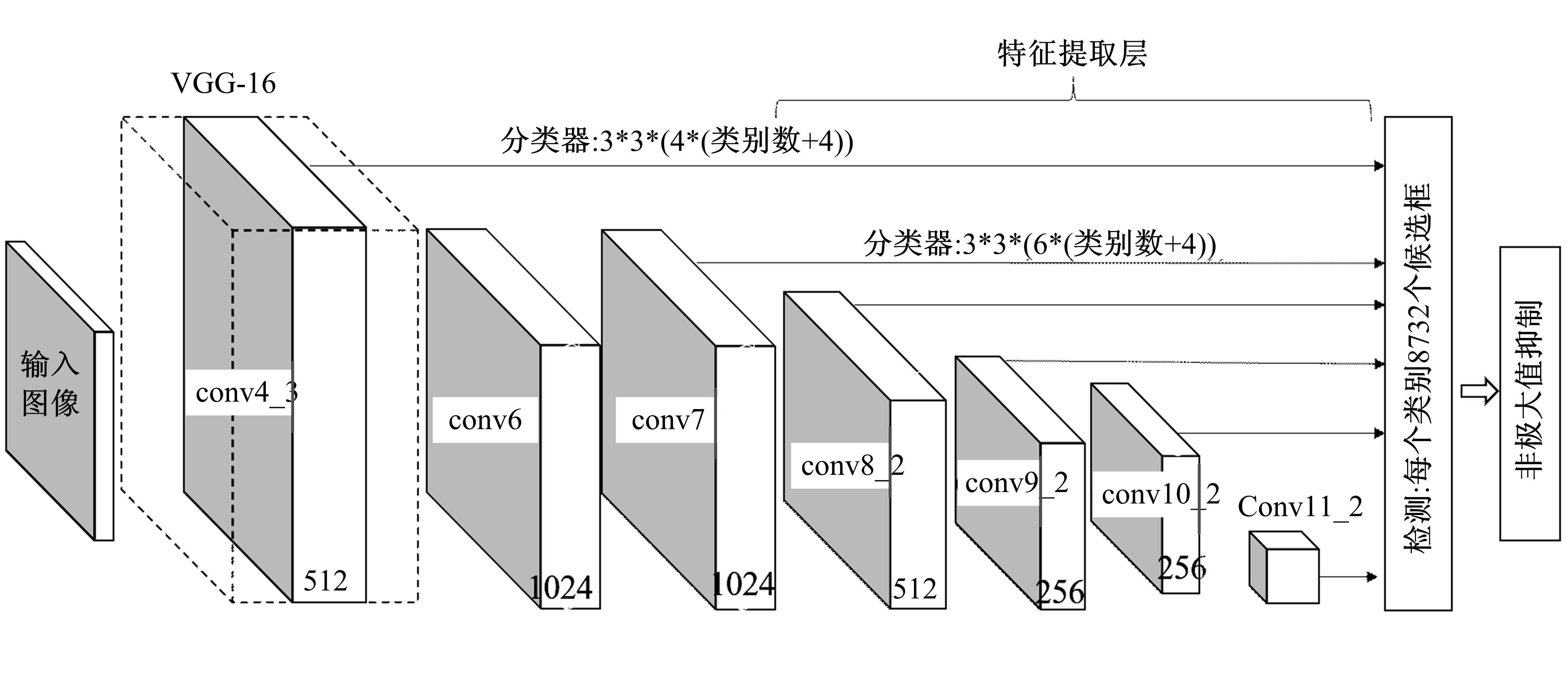
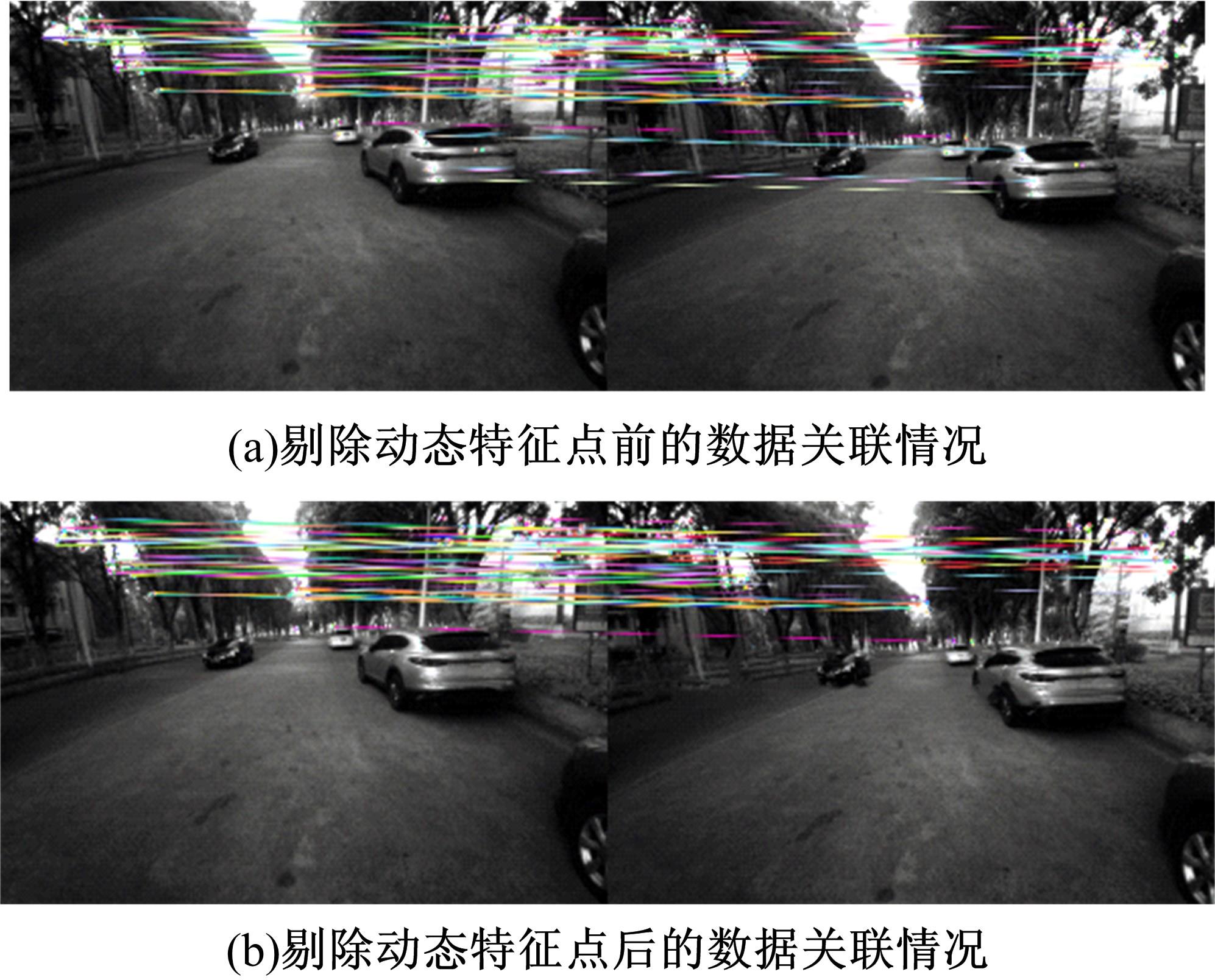
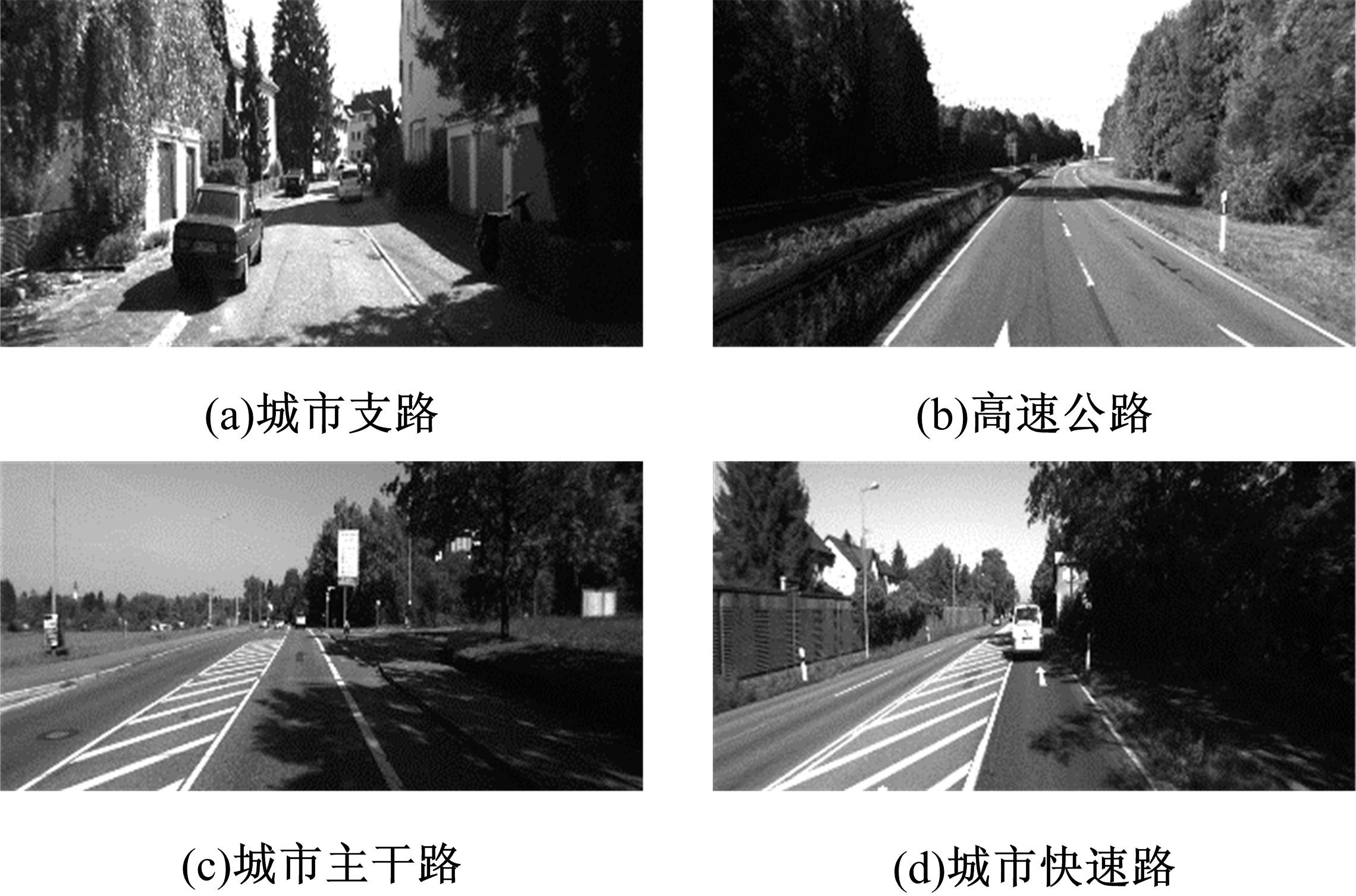
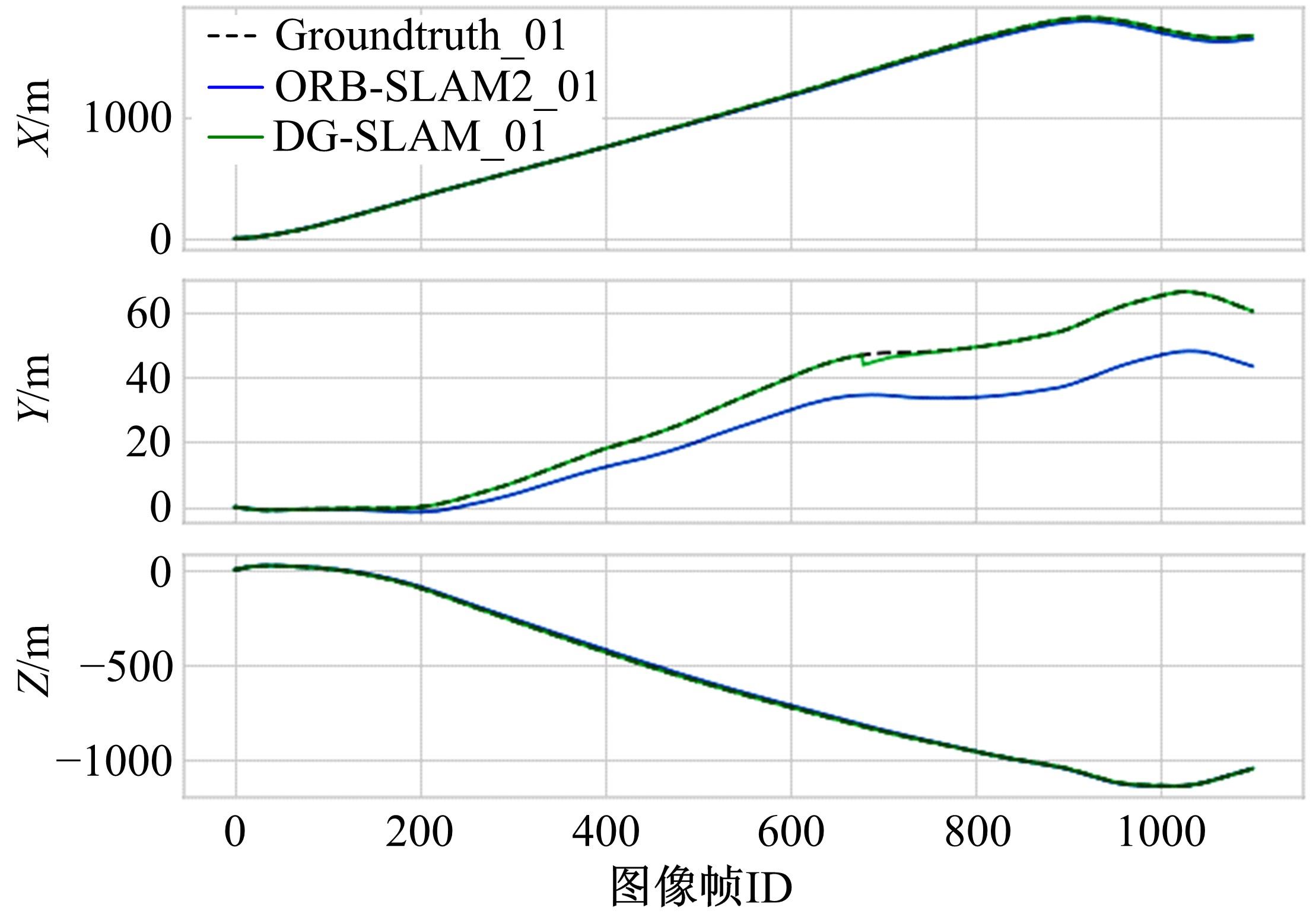
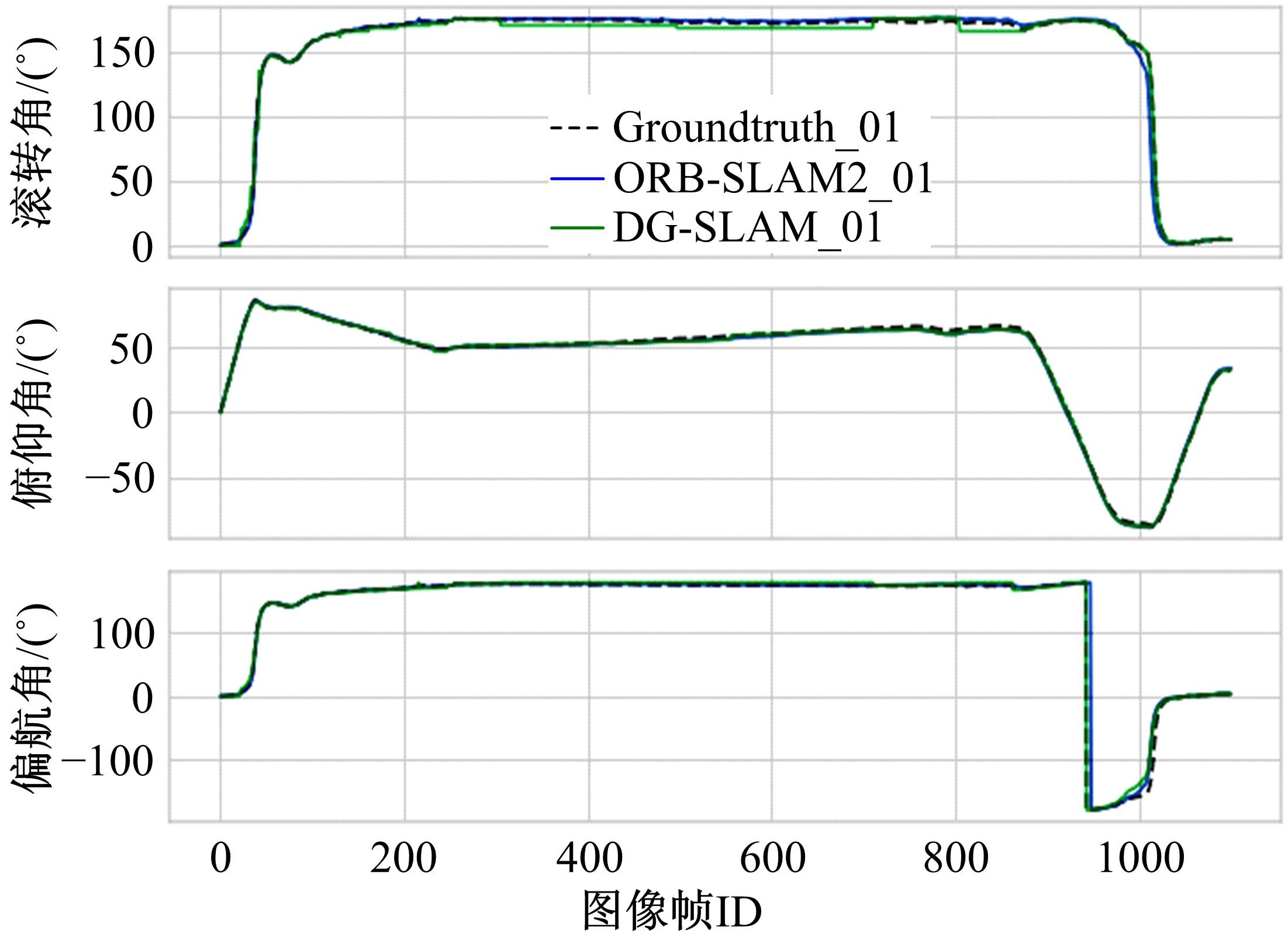
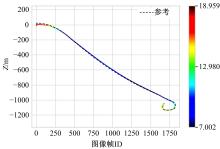
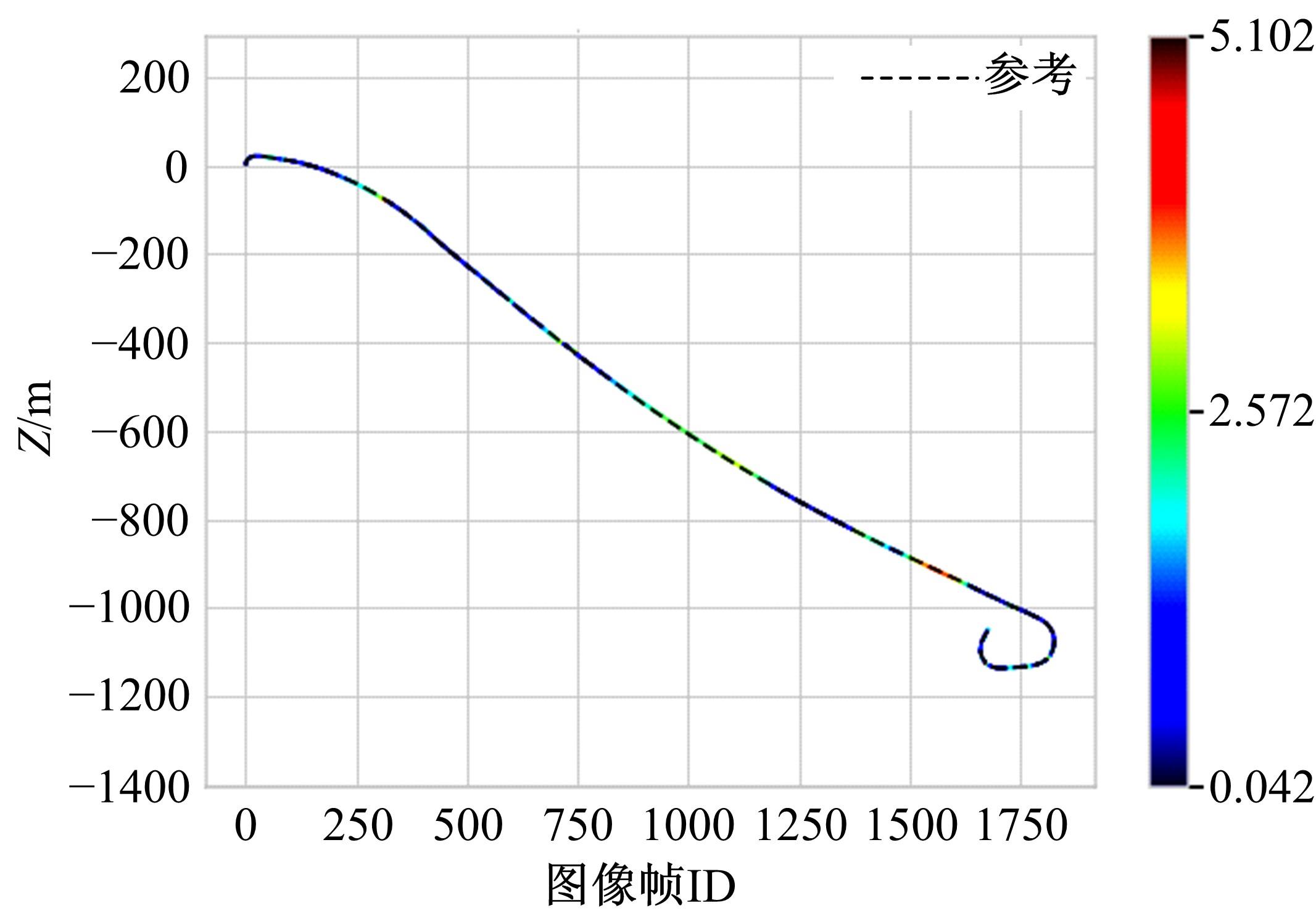
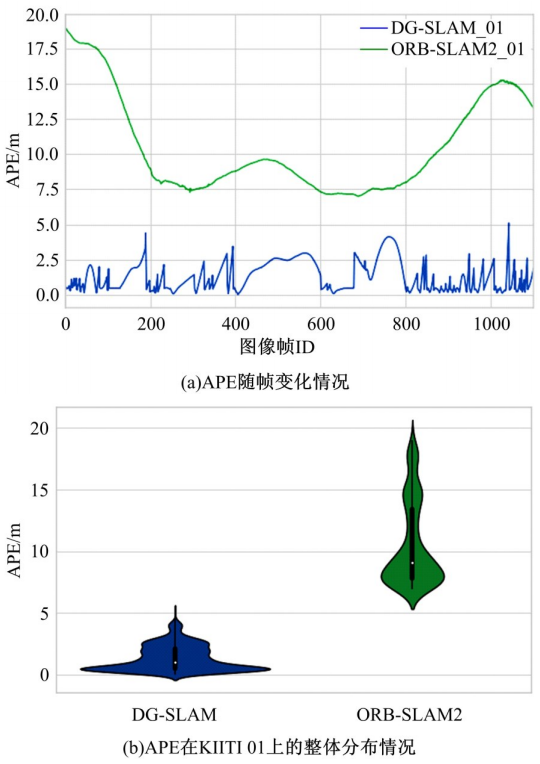
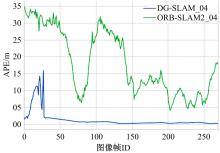
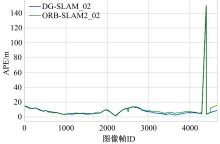
针对现有的同时定位与建图(SLAM)算法实时性不高和在动态环境中定位精度会大幅降低的缺点,提出了一种复合深度学习与并行计算的DG-SLAM算法。采用基于深度学习的目标检测算法检测出行驶环境中的动态物体,在ORB-SLAM2图像帧间匹配前剔除动态物体特征点,降低动态物体对SLAM定位精度的影响;在ORB-SLAM2跟踪局部地图中采用三维空间下内部点的判别方法区分内点和外点,建立GPU并行计算模型以高效搜索局部地图点;利用Saturated核函数作用于重投影误差项的二范数平方和,确保局部地图优化位姿时重投影误差的并行计算。在KITII数据集上进行了算法验证,结果表明,DG-SLAM具有较高跟踪精度,且平均计算效率相同情况下对比ORB-SLAM2高3.4倍以上,超过85帧/s,可实现自动驾驶车辆在动态环境下SLAM系统的稳定运行。
中图分类号:
- TP391.4










| 1 | Yousif K, Bab-Hadiashar A, Hoseinnezhad R. An overview to visual odometry and visual SLAM: applications to mobile robotics[J]. Intelligent Industrial Systems, 2015, 1(4): 289-311. |
| 2 | 邸凯昌,万文辉,赵红颖,等.视觉SLAM技术的进展与应用[J].测绘学报,2018,47(6):770-779. |
| Di Kai-chang, Wan Wen-hui, Zhao Hong-ying, et al. Progress and applications of visual SLAM[J]. Acta Geodaetica et Cartographica Sinica, 2018,47(6):770-779. | |
| 3 | 高成强,张云洲,王晓哲, 等. 面向室内动态环境的半直接法RGB-D SLAM算法[J].机器人, 2019, 41(3): 372-383. |
| Gao Cheng-qiang, Zhang Yun-zhou, Wang Xiao-Zhe, et al. Semi-direct RGB-D SLAM algorithm for dynamic indoor environments[J]. Robot, 2019, 41(3): 372-383. | |
| 4 | Newcombe R A, Fox D, Seitz S M. Dynamic fusion: reconstruction and tracking of non-rigid scenes in real-time[C]∥The IEEE Conference on Computer Vision and Pattern Recognition(CVPR), Portland, Oregon, 2015: 343-352 |
| 5 | Saputra M R U, Markham A, Trigoni N. Visual SLAM andstructure from motion in dynamic environments[J]. ACM Computing Surveys, 2018, 51(2): 1-36. |
| 6 | Klein G, Murray D. Parallel tracking and mapping for small AR workspaces[C]∥The 6th IEEE and ACM International Symposium on Mixed and Augmented Reality, Arlington, USA, 2007: 225-234. |
| 7 | Zhou Yong-long, Ma Kui-zhi, Jiang Xiang, et al. Parallelization and optimization of sift on gpu using cuda[C]∥The IEEE 10th International Conference on High Performance Computing and Communications & IEEE International Conference on Embedded and Ubiquitous Computing, Dalian, China, 2008: 1351-1358. |
| 8 | Bescos B, Fácil J M, Civera J, et al. DynaSLAM: Tracking, mapping, and inpainting in dynamic scenes[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4076-4083. |
| 9 | Kawewong A, Tongprasit N, Tangruamsub S, et al. Online and incremental appearance-based SLAM in highly dynamic environments[J]. International Journal of Robotics Research, 2011, 30(1):33-55. |
| 10 | Zhong F, Wang S, Zhang Z, et al. Detect-slam: Making object detection and slam mutually beneficial[C]∥IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Tahoe, USA, 2018: 1001-1010. |
| 11 | Hosseinyalamdary S. Deep Kalman filter: simultaneous multi-sensor integration and modelling; a GNSS/IMU case study[J]. Sensors, 2018, 18(5): 1316. |
| 12 | Mur-Artal R, Tardós J D. ORB-SLAM2: an open-source slam system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. |
| 13 | Mur-Artal R, Montiel J M M, Tardos J D. ORB-SLAM: a versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163. |
| 14 | 李涛, 董前琨, 张帅, 等. 基于线程池的GPU任务并行计算模式研究[J]. 计算机学报, 2018, 41(10): 2175-2192. |
| Li Tao, Dong Qian-kun, Zang Shuai, et al. GPU task parallel computing paradigm based on thread pool model[J]. Chinese Journal of Computers, 2018, 41(10): 2175-2192. | |
| 15 | Rublee E, Rabaud V, Konolige K, et al. ORB: an efficient alternative to SIFT or SURF[C]∥The International Conference on Computer Vision, Barcelona, Spain, 2011: 2564-2571. |
| 16 | Bay H, Tuytelaars T, van Gool L. Surf: speeded up robust features[C]∥European Conference on Computer Vision, Berlin, Germany, 2006: 404-417. |
| 17 | Lowe D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91-110. |
| 18 | Lepetit V, Moreno-Noguer F, Fua P. EPnP: an accurate on solution to the PnP problem[J]. International Journal of Computer Vision, 2009, 81(2): 155-166. |
| 19 | Liu W, Anguelov D, Erhan D, et al. SSD: single shot multibox detector[C]∥European Conference on Computer Vision, Amsterdam, The Netherlands, 2016: 21-37. |
| 20 | Simonyan K, Zisserman A. Very deep convolutional networks for large-scale image recognition [J]. arXiv preprint arXiv:, 2014. |
| 21 | Geiger A, Lenz P, Stiller C, et al. Vision meets robotics: the KITTI dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| [1] | 陈鑫,于贵申,张彪,潘凯旋,杨立飞. 搅拌摩擦点焊接头拉伸-剪切行为的等效建模[J]. 吉林大学学报(工学版), 2021, 51(4): 1190-1197. |
| [2] | 潘德伦,冀隽,张跃进. 基于运动矢量空间编码的视频监控动态目标检测方法[J]. 吉林大学学报(工学版), 2021, 51(4): 1370-1374. |
| [3] | 杨建,夏琦,周海超,王国林. 修正胎体弦轮廓载重子午线轮胎的降噪机理[J]. 吉林大学学报(工学版), 2021, 51(4): 1198-1203. |
| [4] | 龙江启,向锦涛,俞平,王骏骋. 适用于非线性主动悬架滑模控制的线性干扰观测器[J]. 吉林大学学报(工学版), 2021, 51(4): 1230-1240. |
| [5] | 陈雪云,许韬,黄小巧. 基于条件生成对抗网络的医学细胞图像生成检测方法[J]. 吉林大学学报(工学版), 2021, 51(4): 1414-1419. |
| [6] | 金立生,郭柏苍,王芳荣,石健. 基于改进YOLOv3的车辆前方动态多目标检测算法[J]. 吉林大学学报(工学版), 2021, 51(4): 1427-1436. |
| [7] | 张家旭,王欣志,赵健,施正堂. 汽车高速换道避让路径规划及离散滑模跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1081-1090. |
| [8] | 袁哲明,袁鸿杰,言雨璇,李钎,刘双清,谭泗桥. 基于深度学习的轻量化田间昆虫识别及分类模型[J]. 吉林大学学报(工学版), 2021, 51(3): 1131-1139. |
| [9] | 何仁,赵晓聪,杨奕彬,王建强. 基于驾驶人风险响应机制的人机共驾模型[J]. 吉林大学学报(工学版), 2021, 51(3): 799-809. |
| [10] | 彭博,张媛媛,王玉婷,唐聚,谢济铭. 基于自动编码机-分类器的视频交通状态自动识别[J]. 吉林大学学报(工学版), 2021, 51(3): 886-892. |
| [11] | 宋大凤,杨丽丽,曾小华,王星琦,梁伟智,杨南南. 基于行驶工况合成的混合动力汽车电池寿命优化[J]. 吉林大学学报(工学版), 2021, 51(3): 781-791. |
| [12] | 宋震,李俊良,刘贵强. 基于深度学习和限幅模糊的变转速液压动力源恒流量预测方法[J]. 吉林大学学报(工学版), 2021, 51(3): 1106-1110. |
| [13] | 李锦青,周健,底晓强. 基于循环生成对抗网络的学习型光学图像加密方案[J]. 吉林大学学报(工学版), 2021, 51(3): 1060-1066. |
| [14] | 宋强,孙丹婷,章伟. 纯电动车机械式自动变速器换挡非线性建模及控制[J]. 吉林大学学报(工学版), 2021, 51(3): 810-819. |
| [15] | 王波,何洋扬,聂冰冰,许述财,张金换. 底部爆炸条件下车内乘员的腹部损伤[J]. 吉林大学学报(工学版), 2021, 51(3): 792-798. |
|
||