吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (11): 2558-2567.doi: 10.13229/j.cnki.jdxbgxb20210267
• 交通运输工程·土木工程 • 上一篇
基于典型事故场景的雪天高速换道自动驾驶策略
彭涛1,2( ),方锐2,刘兴亮2,王海玮3(),庞彦伟1,许洪国4,刘福聚2,王涛5
),方锐2,刘兴亮2,王海玮3(),庞彦伟1,许洪国4,刘福聚2,王涛5
- 1.天津大学 电气自动化与信息工程学院,天津 300072
2.中国汽车技术研究中心有限公司,天津 300300
3.广东交通职业技术学院 运输与经济管理学院,广州 510650
4.吉林大学 交通学院,长春 130022
5.天津职业技术师范大学 汽车与交通学院,天津 300222
Automatic driving strategy of high⁃speed lane changing in snowy weather based on typical accident scenarios
Tao PENG1,2(),Rui FANG2,Xing-liang LIU2,Hai-wei WANG3(),Yan-wei PANG1,Hong-guo XU4,Fu-ju LIU2,Tao WANG5
- 1.School of Electrical and Information Engineering,Tianjin University,Tianjin 300072,China
2.China Automotive Technology and Research Center Co. ,Ltd. ,Tianjin 300300,China
3.School of Transportation and Economic Management,Guangdong Communication Polytechnic,Guangzhou 510650,China
4.College of Transportation,Jilin University,Changchun 130022,China
5.College of Automobile and Transportation,Tianjin University of Technology and Education,Tianjin 300222,China
摘要:
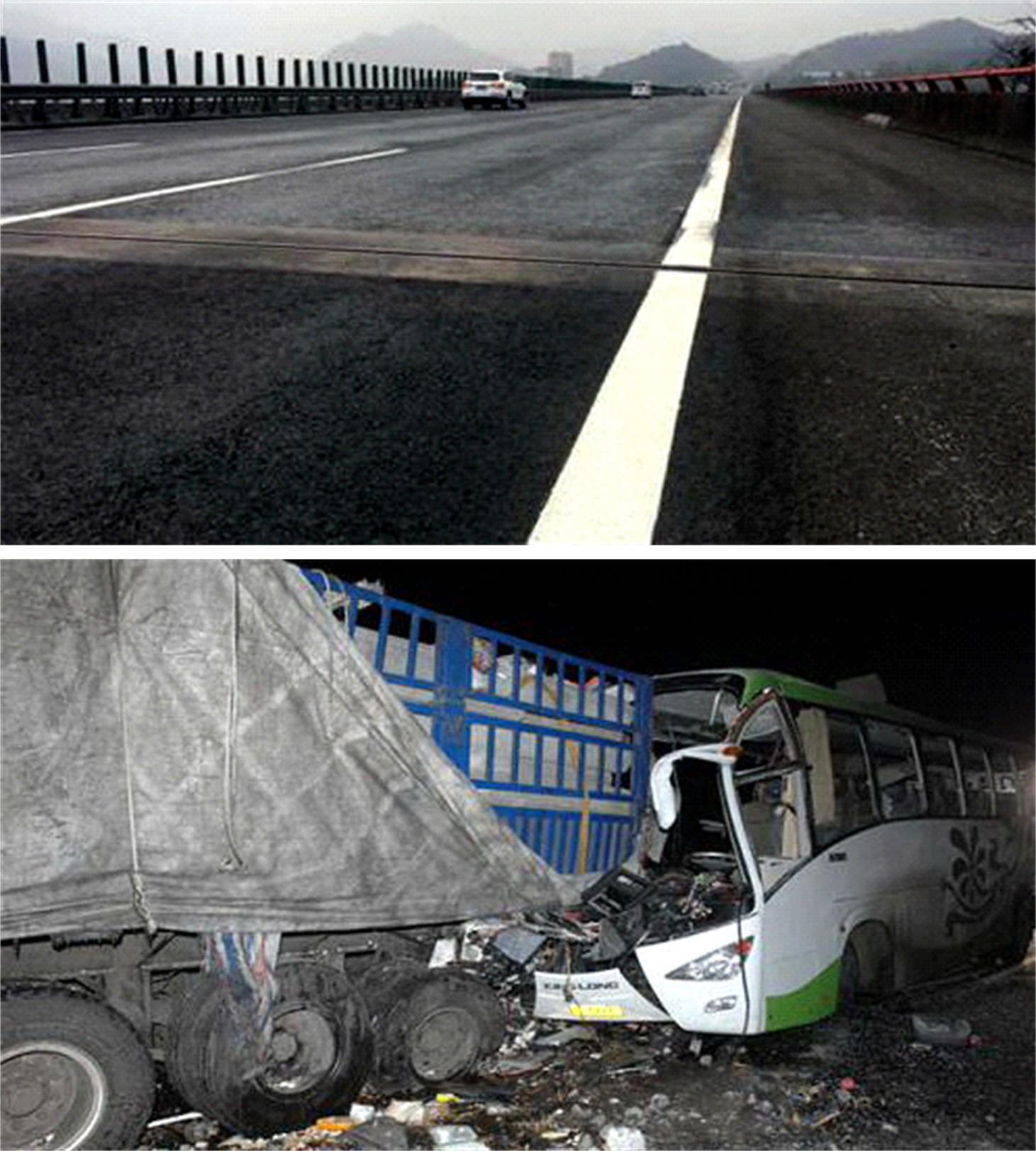
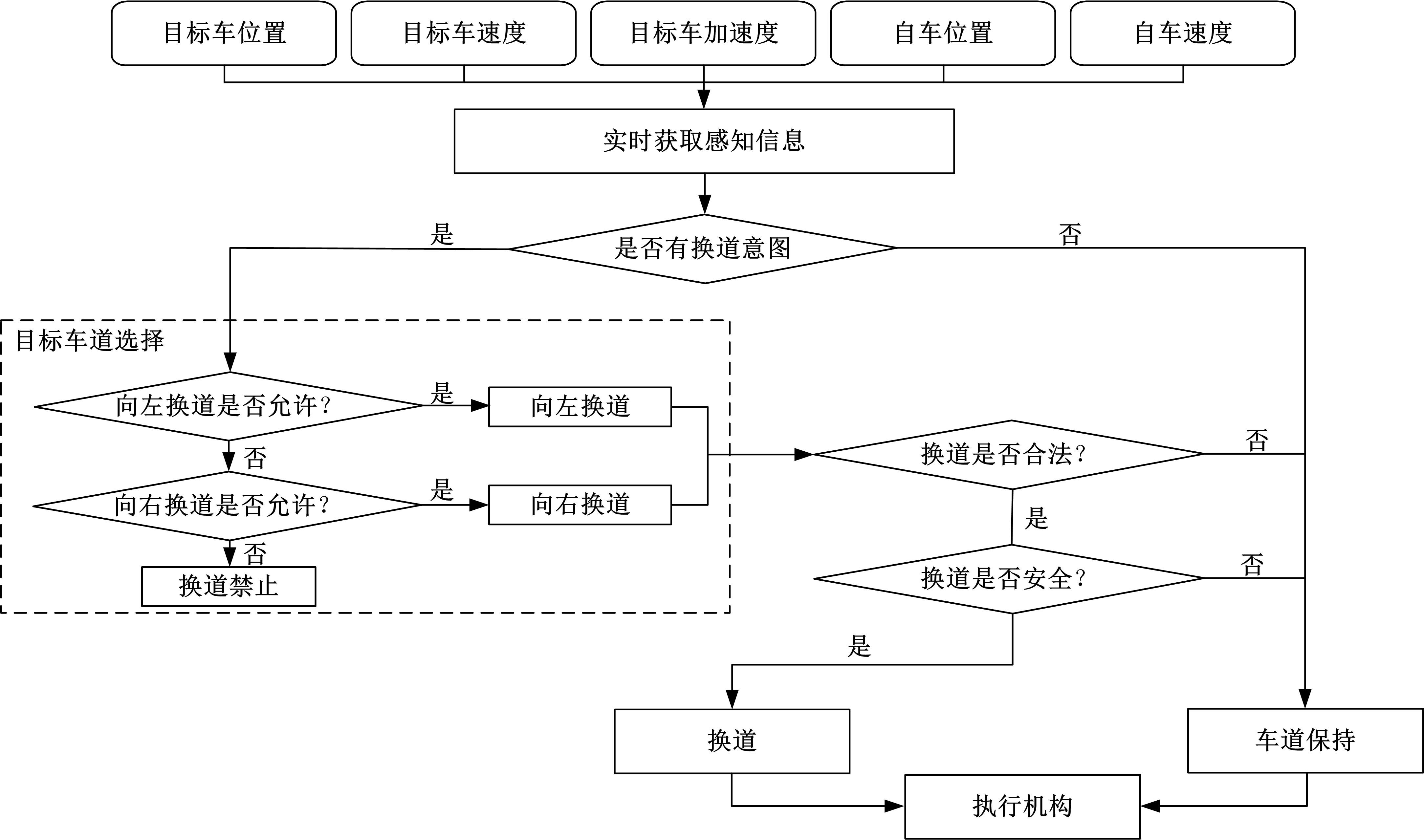
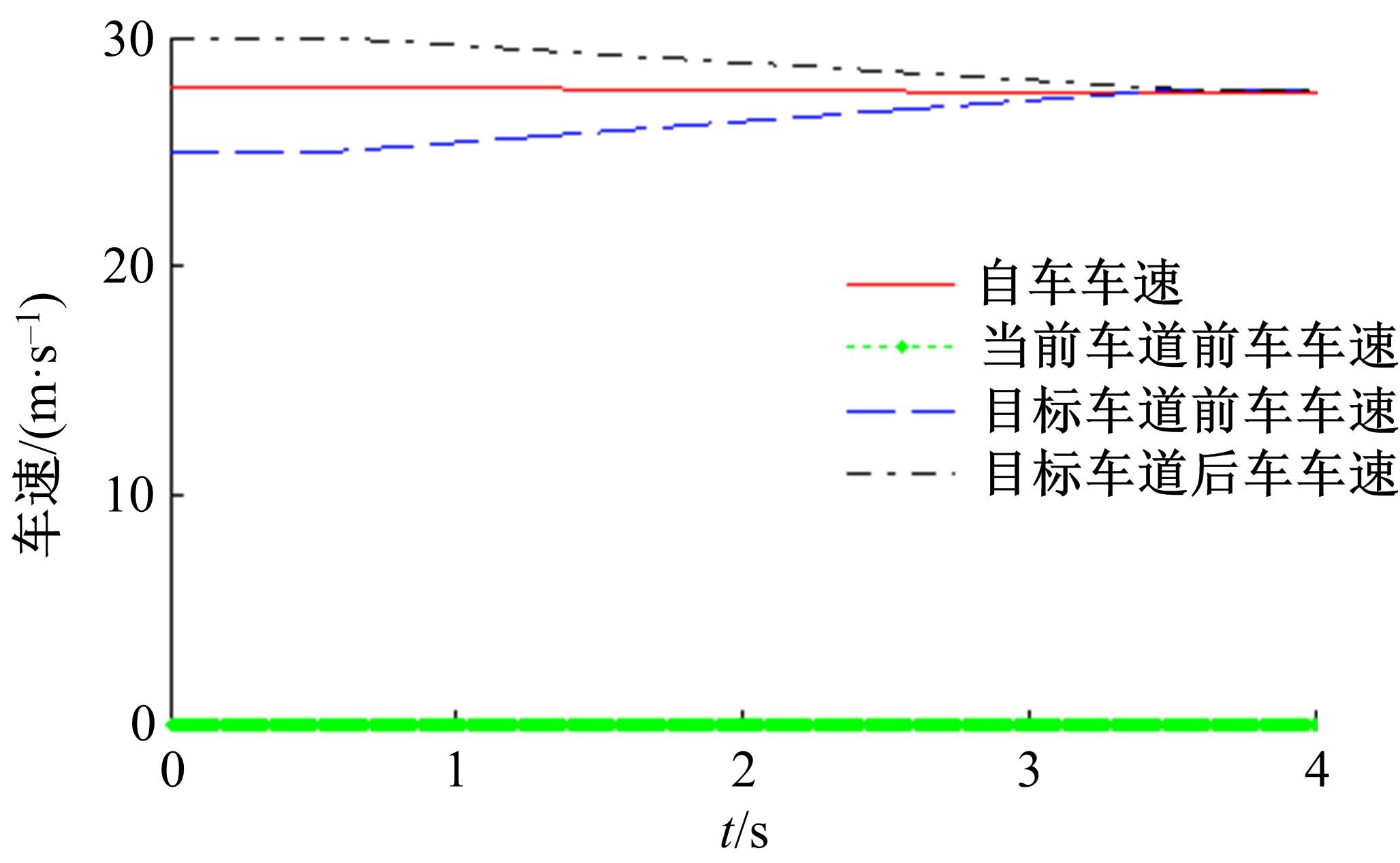
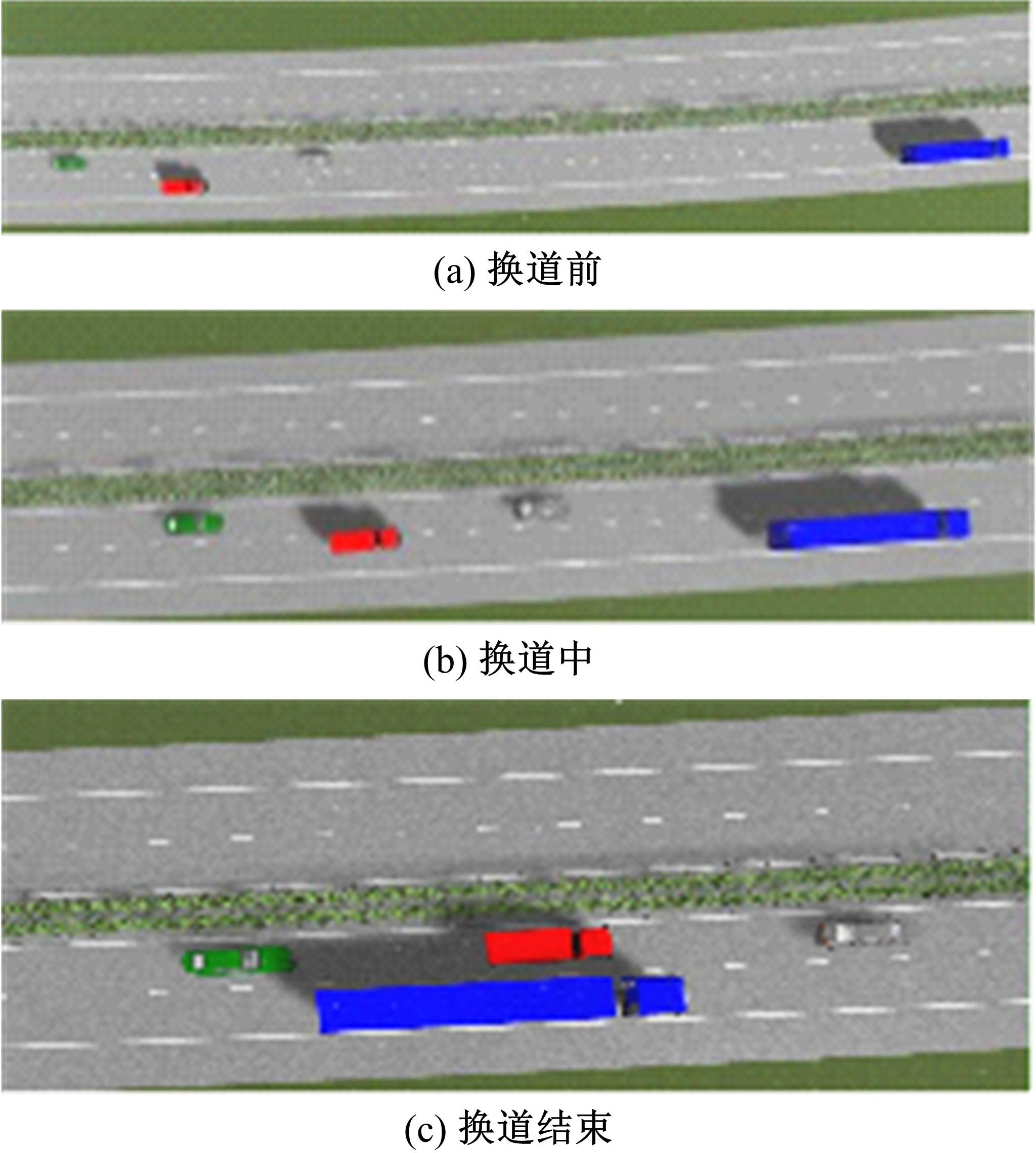
针对雪天低附道路下的车辆高速换道安全问题,提出了一种智能汽车高速安全换道自动驾驶策略。基于典型交通事故案例,研究了车辆雪天高速换道安全特性。构建了Gaussian分布换道轨迹模型,利用决策树和分层加权评分,提出了适应不同驾驶模式的车路协同安全换道决策和路径规划方法。基于PreScan再现交通事故场景,验证低附路面下车辆高速换道智能驾驶策略。仿真结果表明:提出的自动驾驶决策规划机制可有效避免交通事故的发生,可为智能驾驶决策系统开发提供参考。
中图分类号:
- U469.2












| 1 | Jonathan J R, Shirley R, Salissou M, et al. What are the factors that contribute to road accidents? an assessment of law enforcement views, ordinary drivers' opinions, and road accident records[J]. Accident Analysis & Prevention, 2018, 115: 11-24. |
| 2 | 张荣辉, 游峰, 初鑫男, 等. 车-车协同下无人驾驶车辆的换道汇入控制方法[J]. 中国公路学报, 2018, 31(4): 180-191. |
| Zhang Rong-hui, You Feng, Chu Xin-nan, et al. Lane change merging control method for unmanned vehicle under V2V cooperation environment[J]. China Journal of Highway and Transport, 2018, 31(4): 180-191. | |
| 3 | 陈虹, 申忱, 郭洪艳, 等. 面向动态避障的智能汽车滚动时域路径规划[J]. 中国公路学报, 2019, 32(1): 162-172. |
| Chen Hong, Shen Chen, Guo Hong-yan, et al. Moving Horizon path planning for intelligent vehicle considering dynamic obstacle avoidance[J]. China Journal of Highway and Transport, 2019, 32(1): 162-172. | |
| 4 | Gipps P G. A model for the structure of lane-changing decisions[J]. Transportation Research, Part B, 1986, 20(5): 403-414. |
| 5 | Ratrout N T, Rahman S M. A comparative analysis of currently used microscopic and macroscopic traffic simulation software[J]. The Arabian Journal for Science and Engineering, 2009, 34(1): 121-133. |
| 6 | 黄玲, 郭亨聪, 张荣辉, 等. 人机混驾环境下基于LSTM的无人驾驶车辆换道行为模型[J]. 中国公路学报, 2020, 33(7): 156-166. |
| Huang Ling, Guo Heng-cong, Zhang Rong-hui, et al. LSTM-based lane-changing behavior model for unmanned vehicle under environment of heterogeneous human-driven and autonomous vehicles[J]. China Journal of Highway and Transport, 2020, 33(7): 156-166. | |
| 7 | Lecun Y, Cosatto E, Ben J, et al. Dave: autonomous off-road vehicle control using end-to-end learning[R]. Courant Institute, New York University, USA:Technical Report DARPA-IPTO Final Report, 2004. |
| 8 | 杨顺, 蒋渊德, 吴坚, 等. 基于多类型传感数据的自动驾驶深度强化学习方法[J]. 吉林大学学报: 工学版, 2019, 49(4): 1026-1033. |
| Yang Shun, Jiang Yuan-de, Wu Jian, et al. Autonomous driving policy learning based on deep reinforcement learning and muti-type sensor data[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1026-1033. | |
| 9 | Ngai D C K, Yung N H C. A multiple-goal reinforcement learning method for complexvehicle overtaking maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(2): 509-522. |
| 10 | Matthew M N, Chris U, Jhon M D, et al. Motion planning for autonomous driving with a conformal spatiotemporal lattice[C]∥IEEE International Conference on Robotics and Automation, Shanghai, China, 2011: 4889-4895. |
| 11 | Zhang F, Gonzales J, Li S E, et al. Drift control for cornering maneuver of autonomous vehicles[J]. Mechatronics, 2018, 54: 167-174. |
| 12 | Nurbaiti W, Hairi Z, Mohd A A R, et al. Study on potential field based motion planning and control for automated vehicle collision avoidance systems[C]∥IEEE International Conference on Mechatronics, Churchill, Australia, 2017: 208-213. |
| 13 | 孙浩, 邓伟文, 张索民, 等. 考虑全局最优性的汽车微观动态轨迹规划[J]. 吉林大学学报: 工学版, 2014, 44(4): 918-924. |
| Sun Hao, Deng Wei-wen, Zhang Suo-min, et al. Micro vehicle dynamic trajectory plan with global optimality[J]. Journal of Jilin University(Engineering and Technology Edition), 2014, 44(4): 918-924. | |
| 14 | 夏小云, 周育人. 蚁群优化算法的理论研究进展[J]. 智能系统学报, 2016, 11: 9-16. |
| Xia Xiao-yun, Zhou Yu-ren. Advances in theoretical research of ant colony optimization[J]. CAAI Transactions on Intelligent Systems, 2016, 11: 9-16. | |
| 15 | Muller U, Ben J, Cosatto E, et al. Offroad obstacle avoidance through endtoend learning[C]∥Advances in Neural Information Processing Systems, Vancouver, Canada, 2006: 739746. |
| [1] | 朱洁玉,马艳丽. 合流区域多车交互风险实时评估方法[J]. 吉林大学学报(工学版), 2022, 52(7): 1574-1581. |
| [2] | 程国柱,程瑞,徐亮,张文会. 基于乘员伤害分析的公路路侧事故风险评价[J]. 吉林大学学报(工学版), 2021, 51(3): 875-885. |
| [3] | 张家旭,王欣志,赵健,施正堂. 汽车高速换道避让路径规划及离散滑模跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1081-1090. |
| [4] | 王露,刘玉雯,陈红. 侧风下峡谷桥隧连接段汽车的行驶特性[J]. 吉林大学学报(工学版), 2019, 49(3): 736-748. |
| [5] | 代存杰,李引珍,马昌喜,柴获,牟海波. 不确定条件下危险品配送路线多准则优化[J]. 吉林大学学报(工学版), 2018, 48(6): 1694-1702. |
| [6] | 王芳荣, 郭柏苍, 金立生, 高琳琳, 岳欣羽. 次任务驾驶安全评价指标筛选及其权值计算[J]. 吉林大学学报(工学版), 2017, 47(6): 1710-1715. |
| [7] | 谭立东, 刘丹, 李文军. 基于蝇复眼的交通事故现场全景图像阵列仿生设计[J]. 吉林大学学报(工学版), 2017, 47(6): 1738-1744. |
| [8] | 李显生, 孟祥雨, 郑雪莲, 程竹青, 任圆圆. 非满载罐体内液体冲击动力学特性[J]. 吉林大学学报(工学版), 2017, 47(3): 737-743. |
| [9] | 王占中, 赵利英, 曹宁博. 基于多层编码遗传算法的危险品运输调度模型[J]. 吉林大学学报(工学版), 2017, 47(3): 751-755. |
| [10] | 徐进, 陈薇, 周佳, 罗骁, 邵毅明. 汽车转向盘操作与驾驶负荷的相关性[J]. 吉林大学学报(工学版), 2017, 47(2): 438-445. |
| [11] | 郭应时, 付锐, 赵凯, 马勇, 袁伟. 驾驶人换道意图实时识别模型评价及测试[J]. 吉林大学学报(工学版), 2016, 46(6): 1836-1844. |
| [12] | 孙璐, 徐建, 崔相民. 面板数据模型分析及交通事故预测[J]. 吉林大学学报(工学版), 2015, 45(6): 1771-1778. |
| [13] | 王喆, 杨柏婷, 刘昕, 刘群, 宋现敏. 基于模糊聚类的驾驶决策判别[J]. 吉林大学学报(工学版), 2015, 45(5): 1414-1419. |
| [14] | 马勇, 石涌泉, 付锐, 郭应时. 驾驶人分心时长对车道偏离影响的实车试验[J]. 吉林大学学报(工学版), 2015, 45(4): 1095-1101. |
| [15] | 徐建, 孙璐. 解决交通事故数据分析中零值问题的模型[J]. 吉林大学学报(工学版), 2015, 45(3): 769-775. |
|
||