吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (2): 540-549.doi: 10.13229/j.cnki.jdxbgxb.20230093
• 通信与控制工程 • 上一篇
四轮毂驱动电动车辆横向稳定与侧倾预防协同控制策略
江和耀1( ),王永海1,吴幼冬1,王萍2
),王永海1,吴幼冬1,王萍2
- 1.中国船舶集团有限公司第七一三研究所,郑州 450015
2.吉林大学 通信工程学院,长春 130022
Coordinated lateral stability and rollover prevention control for four⁃wheel independent motor drive electric vehicles
He-yao JIANG1(),Yong-hai WANG1,You-dong WU1,Ping WANG2
- 1.The 713rd Research Institute of China State Shipbuilding Corporation Limited,Zhengzhou 450015,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
摘要:
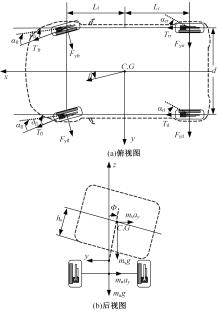
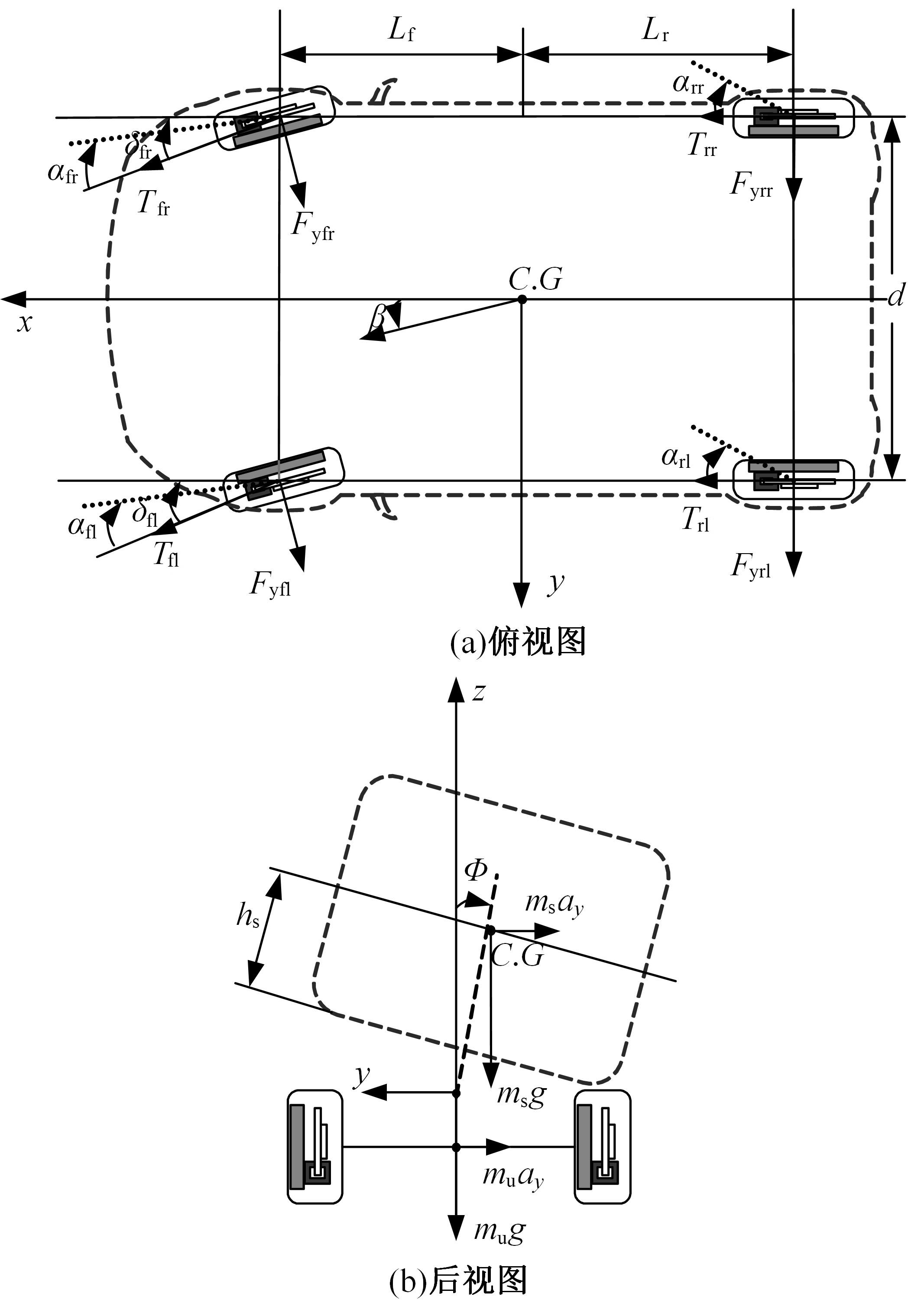
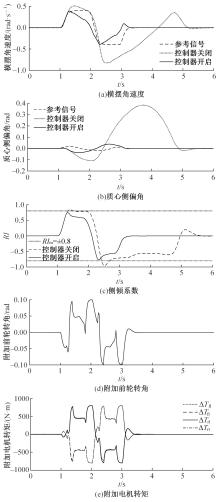
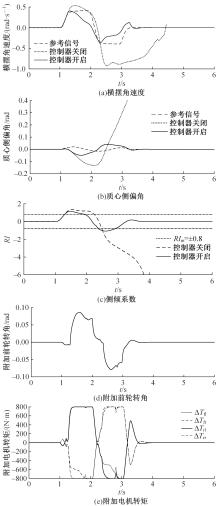
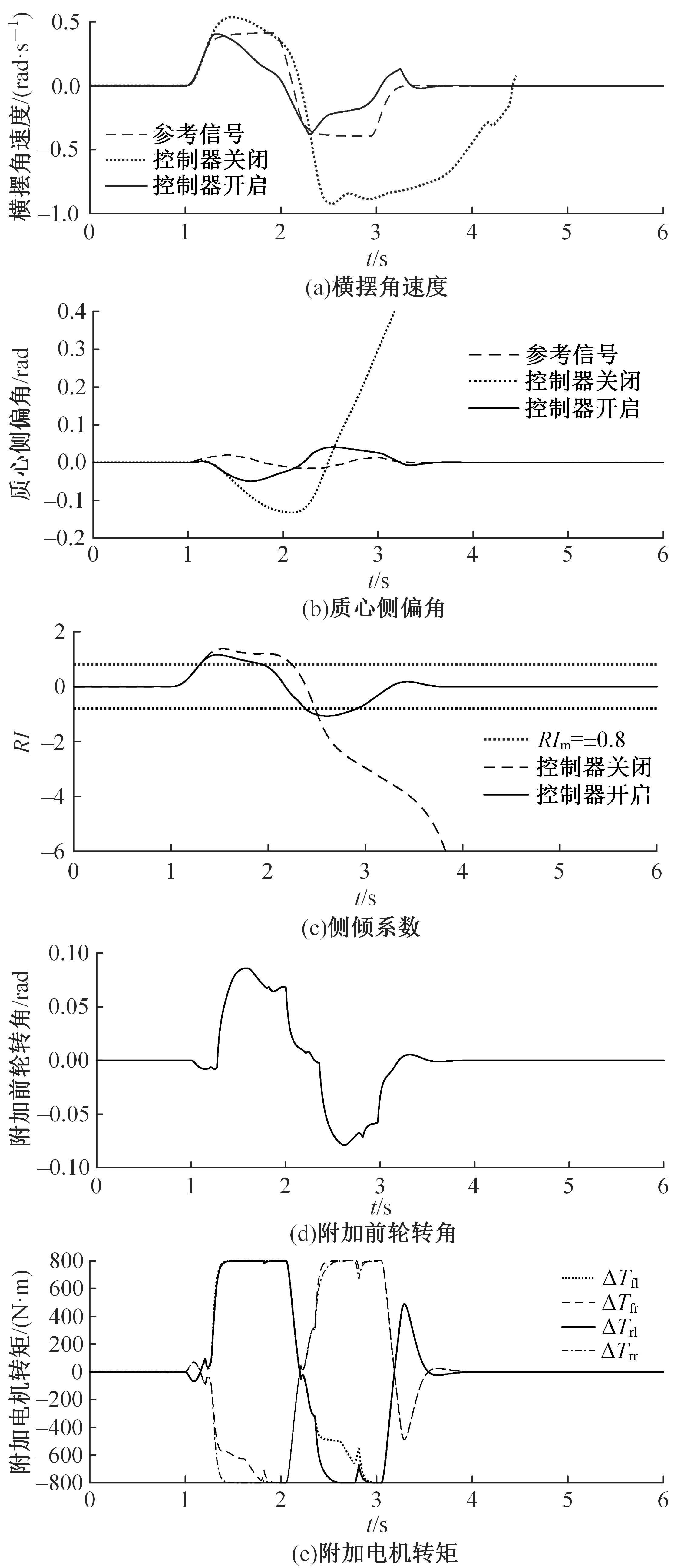
针对四轮轮毂驱动电动汽车在模型预测控制的框架下协同车辆的侧向、横摆运动与侧倾行为,提出一种集成车辆侧向稳定及防侧倾功能的控制策略。首先,为保证预测模型精度,采用非线性轮胎侧向力模型,对车辆未来侧向、横摆及侧倾状态进行预测;然后,基于模型预测控制方法设计控制器,将提高操纵性能、横向稳定性、抑制侧倾、平顺性和安全性等多个控制需求在控制器中集成考虑;最后,仿真实验结果表明:提出的控制器能有效改善车辆在高速急转向时的操纵稳定及侧向稳定性,并有效降低车辆侧倾风险。对于车辆质量增大及质心高度增加引起的高侧倾风险情况,即使控制器面对未知的车辆变化,亦可及时有效地调整车辆姿态防止车辆侧翻,保证行驶安全。
中图分类号:
- U461.6





| 1 | 李玲,施树明,王宪彬,等.发动机制动下高速转弯车辆稳定性[J].吉林大学学报:工学版,2017,47(1):64-70. |
| Li Ling, Shi Shu-ming, Wang Xian-bin, et al. Stability of high-speed and turning vehicle influenced by engine braking[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(1): 64-70. | |
| 2 | Huston R L, Kelly F A. Another look at the static stability factor (SSF) in predicting vehicle rollover[J]. International Journal of Crashworthiness, 2014, 19(6): 567-575. |
| 3 | Liu Y, Yang K, He X, et al. Active steering and anti-roll shared control for enhancing roll stability in path following of autonomous heavy vehicle[R]. SAE Technical Paper, 2019. |
| 4 | 黄健. 四轮独立驱动电动汽车横摆与侧倾稳定性集成控制研究[D].重庆: 重庆大学汽车工程学院,2021. |
| Huang Jian. Integrated control of yaw stability and roll stability of four-wheel independent drive electric vehicle[D]. Chongqing: School of Automotive Engineering, Chongqing University, 2021. | |
| 5 | Ataei M, Khajepour A, Jeon S. Model predictive control for integrated lateral stability, traction/braking control, and rollover prevention of electric vehicles[J]. Vehicle System Dynamics, 2020, 58(1): 49-73. |
| 6 | Falcone P, Borrelli F, Asgari J, et al. Predictive active steering control for autonomous vehicle systems[J]. IEEE Transactions on Control Systems Technology, 2007, 15(3): 566-580. |
| 7 | Lie A, Tingvall C, Krafft M, et al. The effectiveness of electronic stability control (ESC) in reducing real life crashes and injuries[J]. Traffic Injury Prevention, 2006, 7(1): 38-43. |
| 8 | 陈双, 宗长富, 张立军, 等. 主动悬架平顺性和侧倾姿态综合控制策略[J]. 吉林大学学报: 工学版, 2011, 41(): 59-64. |
| Chen Shuang, Zong Chang-fu, Zhang Li-jun, et al. Research on integrated control strategy of ride and roll attitude via active suspension[J]. Journal of Jilin University (Engineering and Technology Edition), 2011, 41(Sup.2): 59-64. | |
| 9 | Yoon J, Cho W, Koo B, et al. Unified chassis control for rollover prevention and lateral stability[J]. IEEE Transactions on Vehicular Technology, 2008, 58(2): 596-609. |
| 10 | Chen J, Shuai Z, Zhang H, et al. Path following control of autonomous four-wheel-independent- drive electric vehicles via second-order sliding mode and nonlinear disturbance observer techniques[J]. IEEE Transactions on Industrial Electronics, 2020, 68(3): 2460-2469. |
| 11 | Beal C E, Gerdes J C. Model predictive control for vehicle stabilization at the limits of handling[J]. IEEE Transactions on Control Systems Technology, 2012, 21(4): 1258-1269. |
| 12 | 李静, 余春贤, 陆辉, 等. 基于模型预测的车辆稳定控制[J]. 吉林大学学报:工学版, 2013, 43(): 504-508. |
| Li Jing, Yu Chun-xian, Lu Hui, et al. Vehicle stability control based on model prediction[J]. Journal of Jilin University (Engineering and Technology Edition), 2013, 43(Sup.1): 504-508. | |
| 13 | 贺宜,褚端峰,吴超仲,等.基于MPC的大型车辆防侧翻控制方法[J].交通运输系统工程与息,2015,15(3):89-99. |
| He Yi, Chu Duan-feng, Wu Chao-zhong, et al. Anti-rollover control for heavy-duty vehicles based on model prodictive control[J]. Journal of Transportation Systems Engineering and Information Technology, 2015, 15(3): 89-99. | |
| 14 | Xu N, Hashemi E, Tang Z, et al. Data-driven tire capacity estimation with experimental verification[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 28(3):1-15. |
| 15 | Zhang X, Wang P, Lin J, et al. Real-time nonlinear predictive controller design for drive-by-wire vehicle lateral stability with dynamic boundary conditions[J]. Fundamental Research, 2022, 2(1): 131-143. |
| 16 | Wang P, Liu H, Guo L, et al. Design and experimental verification of real-time nonlinear predictive controller for improving the stability of production vehicles[J]. IEEE Transactions on Control Systems Technology, 2020, 29(5): 2206-2213. |
| 17 | Ataei M, Khajepour A, Jeon S. A general rollover index for tripped and un-tripped rollovers on flat and sloped roads[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of automobile engineering, 2019, 233(2): 304-316. |
| 18 | Li Z, Wang P, Liu H, et al. Coordinated longitudinal and lateral vehicle stability control based on the combined-slip tire model in the MPC framework[J]. Mechanical Systems and Signal Processing, 2021, 161: 107947. |
| [1] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [2] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [3] | 申富媛,李炜,蒋栋年. 四旋翼无人机寿命预测和自主维护方法[J]. 吉林大学学报(工学版), 2023, 53(3): 841-852. |
| [4] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [5] | 孙耀,胡云峰,周杰敏,程欢,曲婷,赵靖华,陈虹. 基于分层控制器的SCR系统滚动时域优化控制方法[J]. 吉林大学学报(工学版), 2023, 53(1): 61-71. |
| [6] | 胡云峰,于彤,杨惠策,孙耀. 低温环境下燃料电池启动优化控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 2034-2043. |
| [7] | 吴文静,战勇斌,杨丽丽,陈润超. 考虑安全间距的合流区可变限速协调控制方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1315-1323. |
| [8] | 李文航,倪涛,赵丁选,张泮虹,师小波. 基于集合卡尔曼滤波的高机动救援车辆主动悬挂控制方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2816-2826. |
| [9] | 杨志军,高忠义,王丽君,黄观新,危宇泰. 面向刚柔耦合定位平台的模型预测控制算法[J]. 吉林大学学报(工学版), 2022, 52(12): 2806-2815. |
| [10] | 彭浩楠,唐明环,查奇文,王伟忠,王伟达,项昌乐,刘玉龙. 自动驾驶汽车双车道换道最优轨迹规划方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2852-2863. |
| [11] | 贾超,徐洪泽,王龙生. 基于多质点模型的列车自动驾驶非线性模型预测控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1913-1922. |
| [12] | 马苗苗,潘军军,刘向杰. 含电动汽车的微电网模型预测负荷频率控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1644-1652. |
| [13] | 郑宏宇, 杨硕, 文良浒, 陈国迎, 陈宇超. 基于电控制动系统的客车防侧翻控制策略[J]. 吉林大学学报(工学版), 2016, 46(4): 1038-1043. |
| [14] | 唐晓峰, 高峰, 徐国艳, 丁能根, 蔡尧, 刘建行. 基于智能空间-车框架理论的车辆行驶运动学状态的预测[J]. 吉林大学学报(工学版), 2015, 45(5): 1395-1401. |
| [15] | 许芳1, 2, 靳伟伟2, 陈虹1, 2, 张振威2. 一种模型预测控制器的FPGA硬件实现[J]. 吉林大学学报(工学版), 2014, 44(4): 1042-1050. |
|
||