吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (7): 2093-2103.doi: 10.13229/j.cnki.jdxbgxb.20221143
• 通信与控制工程 • 上一篇
无人机集群分布式跟踪抗扰控制设计与实验验证
鲜斌1( ),王印鑫1,王岭2
),王印鑫1,王岭2
- 1.天津大学 电气自动化与信息工程学院,天津 300072
2.天津航海仪器研究所,天津 300451
Distributed robust tracking control for multiple unmanned aerial vehicles: theory and experimental verification
Bin XIAN1(),Yin-xin WANG1,Ling WANG2
- 1.School of Electrical and Information Engineering,Tianjin University,Tianjin 300072,China
2.Tianjin Navigation Instrument Research Institute,Tianjin 300451,China
摘要:
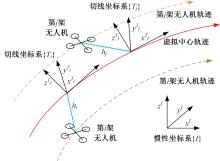
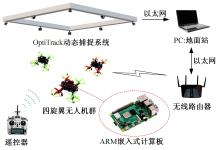
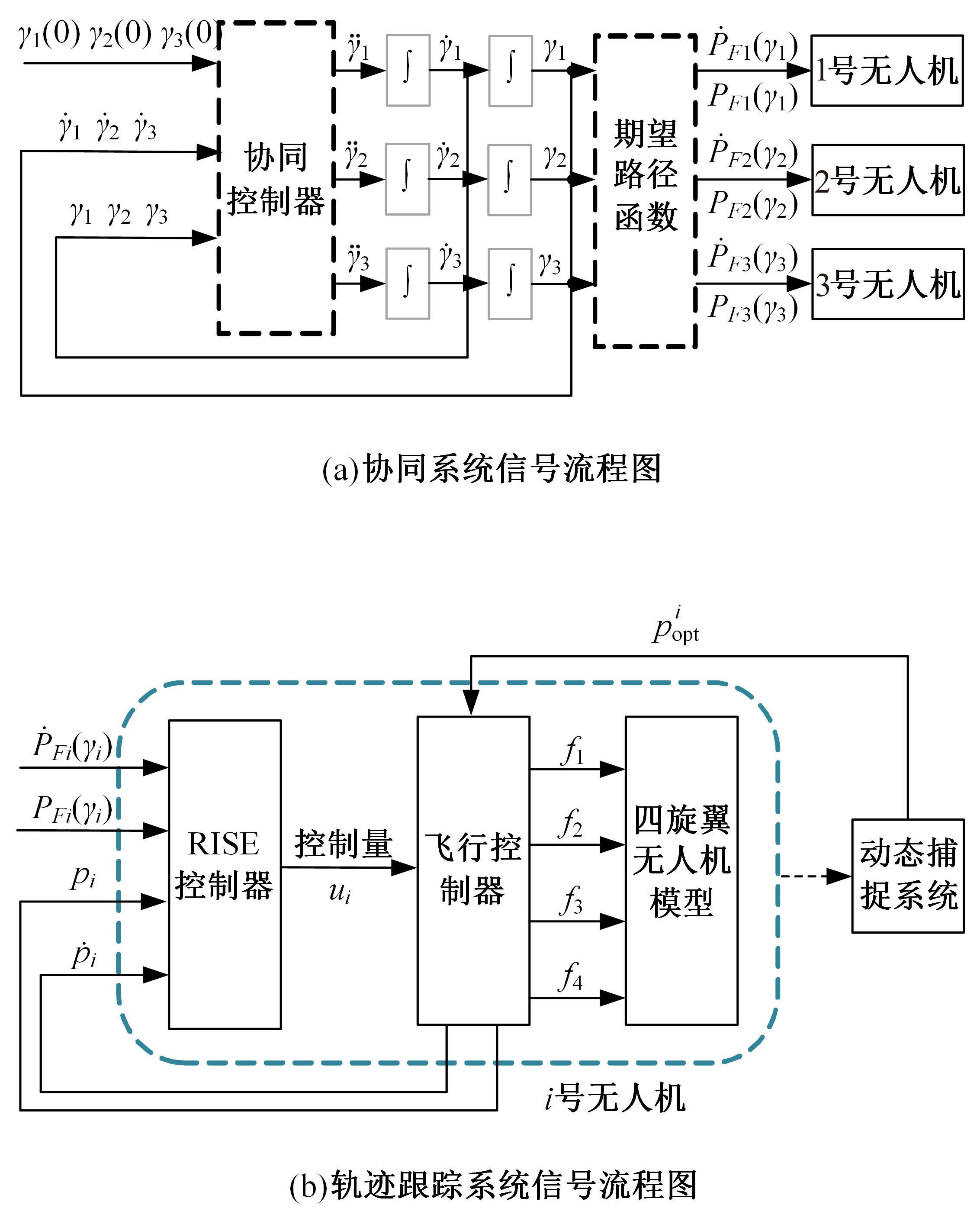
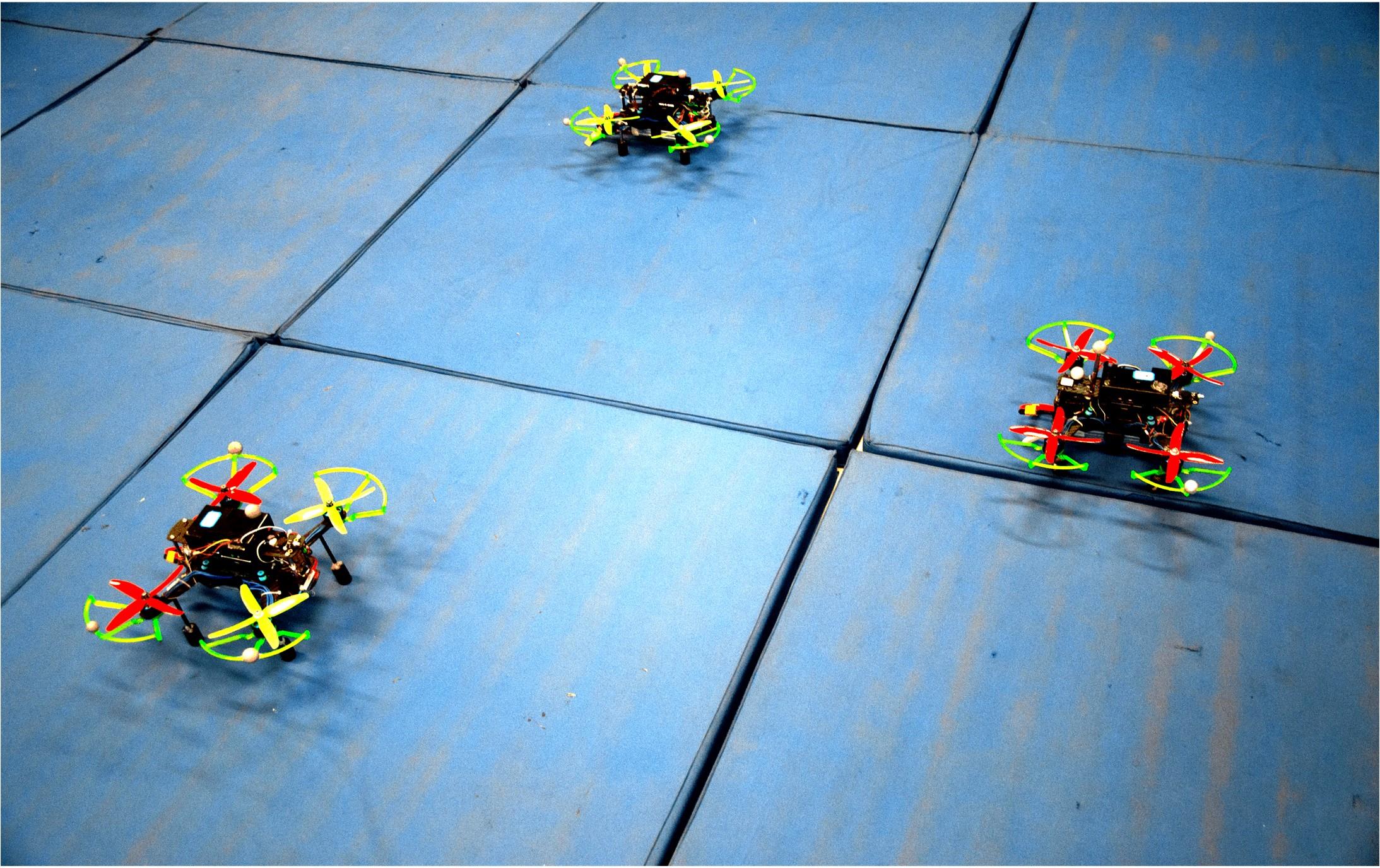
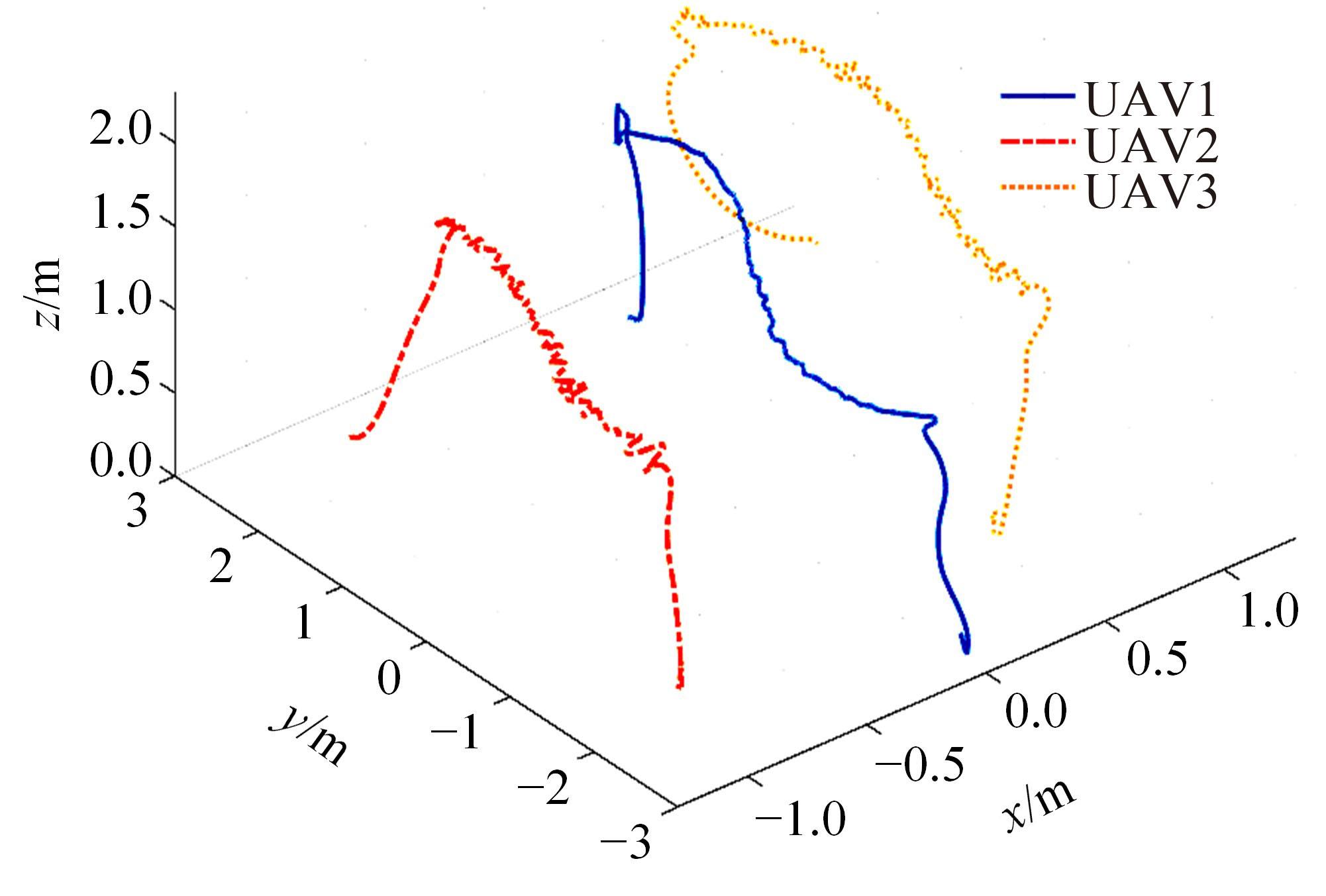
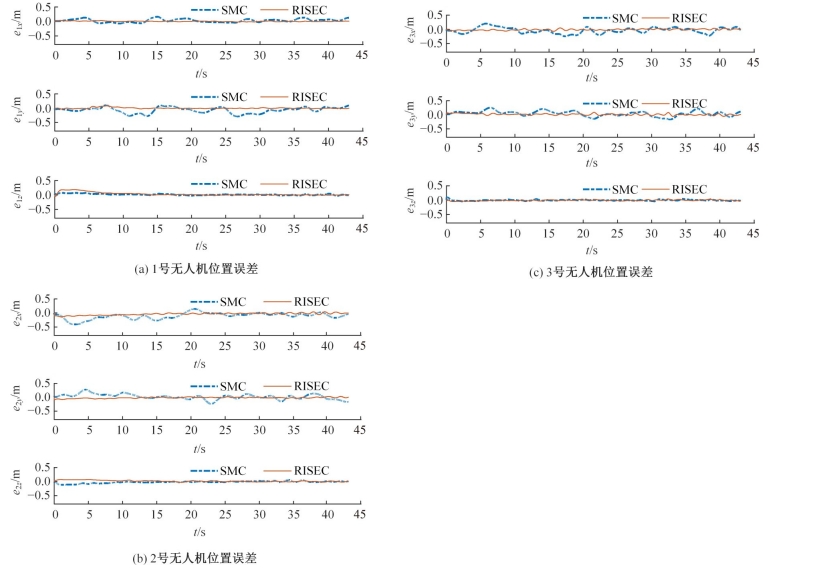
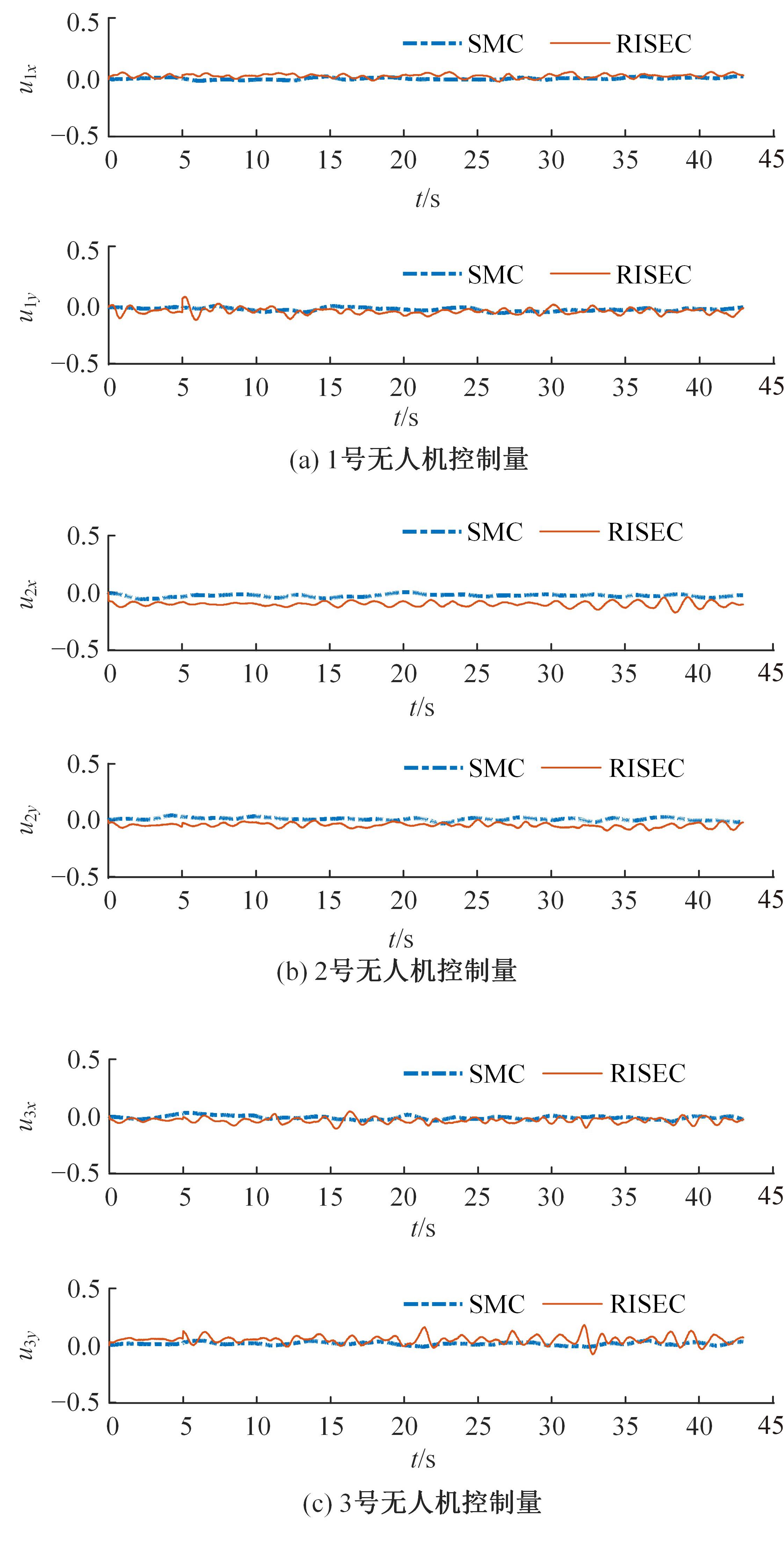
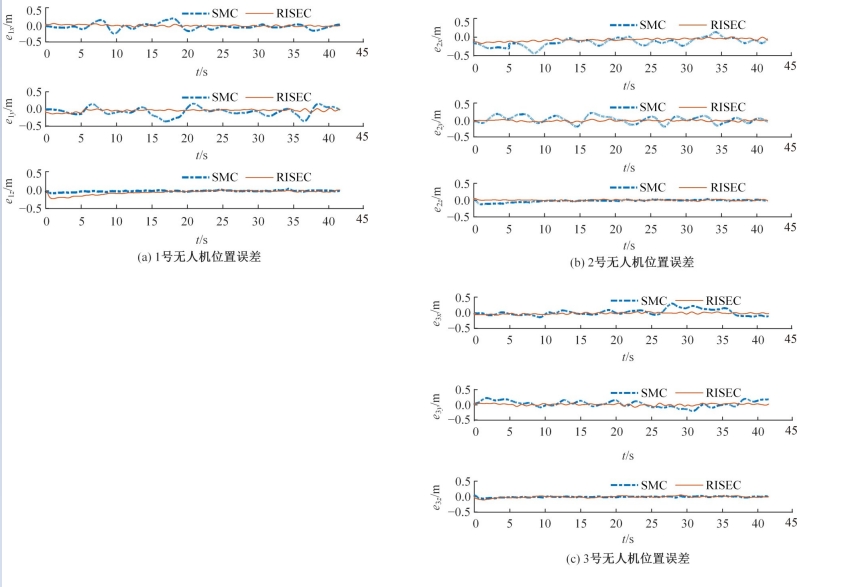
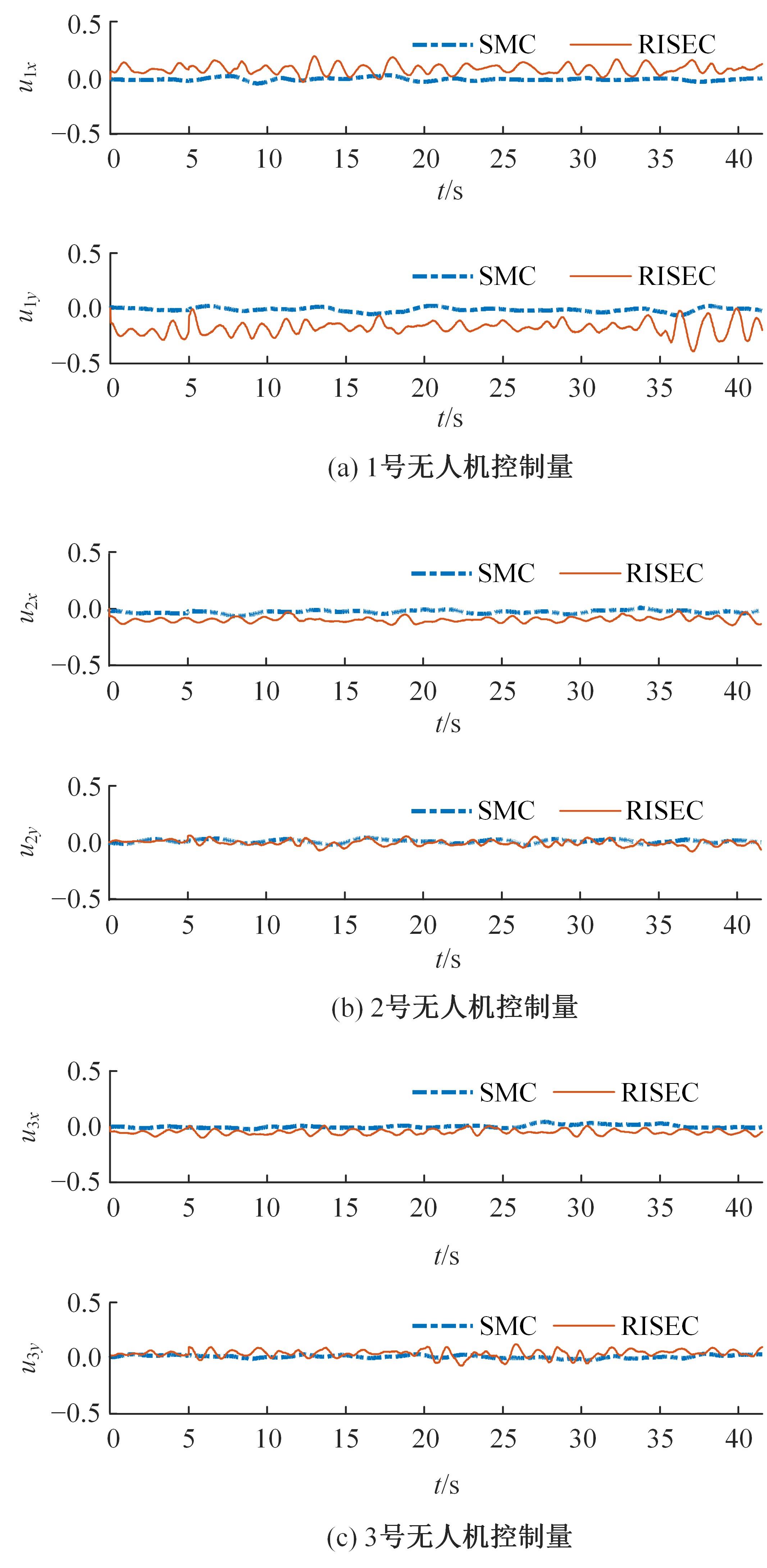
研究了存在外界未知扰动下分布式无人机集群轨迹跟踪问题,设计了一种新的无人机集群非线性鲁棒轨迹跟踪策略。首先,基于切向坐标系构造了无人机编队模型,并设计了协同控制律;其次,针对轨迹跟踪问题设计了一种基于误差符号函数积分(RISE)的鲁棒控制算法,用于补偿未知外界扰动的影响,提高了无人机编队系统的鲁棒性;然后,基于Lyapunov分析的方法,证明了无人机编队系统协同误差全局渐近收敛,以及位置跟踪误差半全局渐近收敛;最后,在四旋翼无人机编队实验平台上进行了无风扰和有风扰条件下无人机集群轨迹跟踪实验,并与常规滑模控制算法进行了性能对比实验。实验结果表明,所设计的控制律可以实现多无人机的协同轨迹跟踪,且具有较强的抗外界干扰能力。
中图分类号:
- TP273









| 1 | Elmokadem T. Distributed coverage control of quadrotor multi-UAV systems for precision agriculture[J]. IFAC-Papers Online, 2019, 52(30): 251-256. |
| 2 | 鲜斌,许鸣镝,王岭. 分布式无人机队列控制与动态障碍规避设计[J]. 控制与决策, 2022, 37(9): 2226-2234. |
| Xian Bin, Xu Ming-di, Wang Ling. Distributed unmanned aerial vehicle platoon control with dynamic obstacle avoidance[J]. Control and Decision, 2022, 37(9): 2226-2234. | |
| 3 | Lagkas T, Argyriou V, Bibi S, et al. UAV IoT framework views and challenges: towards protecting drones as "Things"[J]. Sensors, 2018, 18(11):No. 4015. |
| 4 | Videras Rodríguez M, Melgar S G, Cordero A S, et al. A critical review of unmanned aerial vehicles (UAVs) use in architecture and urbanism: scientometric and bibliometric analysis[J]. Applied Sciences, 2021, 11(21): No.9966. |
| 5 | Ali Z A, Israr A, Alkhammash E H, et al. A leader-follower formation control of multi-UAVs via an adaptive hybrid controller[J]. Complexity, 2021, 2021:No. 9231636. |
| 6 | Turpin M, Michael N, Kumar V. Trajectory design and control for aggressive formation flight with quadrotors[J]. Autonomous Robots, 2012, 33(1): 143-156. |
| 7 | Zhou D, Wang Z, Schwager M. Agile coordination and assistive collision avoidance for quadrotor swarms using virtual structures[J]. IEEE Transactions on Robotics, 2018, 34(4): 916-923. |
| 8 | Dong X W, Yu B C, Shi Z Y, et al. Time-varying formation control for unmanned aerial vehicles: theories and applications[J]. IEEE Transactions on Control Systems Technology, 2015, 23(1): 340-348. |
| 9 | Xie W, Cabecinhas D, Cunha R, et al. Cooperative path following control of multiple quadcopters with unknown external disturbances[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(1): 667-679. |
| 10 | 王丹丹, 宗群, 张博渊, 等. 多无人机完全分布式有限时间编队控制[J]. 控制与决策, 2019, 34(12): 2656-2660. |
| Wang Dan-dan, Zong Qun, Zhang Bo-yuan, et al. Fully distributed finite-time formation control for multiple UAVs[J]. Control and Decision, 2019, 34(12): 2656-2660. | |
| 11 | Aggarwal S, Kumar N. Path planning techniques for unmanned aerial vehicles: a review, solutions, and challenges[J]. Computer Communications, 2020, 149: 270-299. |
| 12 | Zhang D, Duan H. Social-class pigeon-inspired optimization and time stamp segmentation for multi-UAV cooperative path planning[J]. Neurocomputing, 2018, 313: 229-246. |
| 13 | 蒋婉玥,王道波,王寅,等. 基于时变向量场的多无人机编队集结控制方法[J]. 控制理论与应用, 2018, 35(9): 1215-1228. |
| Jiang Wan-yue, Wang Dao-bo, Wang Yin, et al. A vector field based method for multi-UAV simultaneous arrival[J]. Control Theory & Applications, 2018, 35(9): 1215-1228. | |
| 14 | 张佳龙,闫建国,张普. 基于自适应方法的多无人机编队队形控制[J]. 航空学报, 2020, 41(1): 234-247. |
| Zhang Jia-long, Yan Jian-guo, Zhang Pu. Multi-UAV formation forming control based on adaptive method under wind field disturbances[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 234-247. | |
| 15 | Liao F, Teo R, Wang J L, et al. Distributed formation and reconfiguration control of VTOL UAVs[J]. IEEE Transactions on Control Systems Technology, 2017, 25(1): 270-277. |
| 16 | Hua Y Z, Dong X W, Han L, et al. Finite-time time-varying formation tracking for high-order multiagent systems with mismatched disturbances[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(10): 3795-3803. |
| 17 | 李正平, 鲜斌. 基于虚拟结构法的分布式多无人机鲁棒编队控制[J]. 控制理论与应用, 2020, 37(11): 2423-2431. |
| Li Zheng-ping, Xian Bin. Robust distributed formation control of multiple unmanned aerial vehicles based on virtual structure[J]. Control Theory & Applications, 2020, 37(11): 2423-2431. | |
| 18 | 鲜斌,李杰奇,古训. 基于非线性扰动观测器的无人机地面效应补偿[J]. 吉林大学学报:工学版, 2022, 52(8): 1926-1933. |
| Xian Bin, Li Jie-qi, Gu Xun. Ground effects compensation for an unmanned aerial vehicle via nonlinear disturbance observer[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(8): 1926-1933. | |
| 19 | Cunha R, Antunes D, Gomes P, et al. A path-following preview controller for autonomous air vehicles[C]∥AIAA Guidance, Navigation, and Control Conference and Exhibit,Keystone, USA,2006: 6715. |
| 20 | Xian B, Dawson D M, de Queiroz M S, et al. A continuous asymptotic tracking control strategy for uncertain nonlinear systems[J]. IEEE Transactions on Automatic Control, 2004, 49(7): 1206-1211. |
| 21 | 温家鑫,赵国荣,张超,等. 无人机三维编队保持滑模控制器设计[J]. 电光与控制, 2020,27(5): 14-18. |
| Wen Jia-xin, Zhao Guo-rong, Zhang Chao, et al. Design of a sliding mode controller for three-dimensional formation keeping of UAVs[J]. Electronics Optics&Control, 2020, 27(5): 14-18. |
| [1] | 李寿涛,李嘉霖,孟庆瑜,郭洪艳. 基于点云直方图的回环检测算法和车辆定位方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2395-2403. |
| [2] | 苑磊,何仁. 基于防抱死制动系统制动器带宽参数整定的自抗扰控制器滑移率控制[J]. 吉林大学学报(工学版), 2023, 53(12): 3335-3341. |
| [3] | 张冲,胡云峰,宫洵,孙耀. 燃料电池阴极流量无模型自适应滑模控制器设计[J]. 吉林大学学报(工学版), 2022, 52(9): 2085-2095. |
| [4] | 胡云峰,于彤,杨惠策,孙耀. 低温环境下燃料电池启动优化控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 2034-2043. |
| [5] | 刘远红,郭攀攀,张彦生,李鑫. 基于黎曼流形的稀疏图保持投影的特征提取[J]. 吉林大学学报(工学版), 2021, 51(6): 2268-2279. |
| [6] | 何德峰,罗捷,舒晓翔. 自主网联车辆时滞反馈预测巡航控制[J]. 吉林大学学报(工学版), 2021, 51(1): 349-357. |
| [7] | 吴文静,陈润超,贾洪飞,罗清玉,孙迪. 车路协同环境下路段掉头区域车辆协同控制[J]. 吉林大学学报(工学版), 2019, 49(4): 1100-1106. |
| [8] | 李静, 韩佐悦, 杨威, 邢国成, 周瑜. 基于非线性模型的磁流变半主动悬架驱动系统[J]. 吉林大学学报(工学版), 2018, 48(3): 645-651. |
| [9] | 王春阳, 辛瑞昊, 史红伟. 针对大滞后系统的滞后时间削弱自抗扰控制方法[J]. 吉林大学学报(工学版), 2017, 47(4): 1231-1237. |
| [10] | 魏伟, 戴明, 李嘉全, 毛大鹏, 王昊. 基于重复-自抗扰控制的航空光电稳定平台控制系统设计[J]. 吉林大学学报(工学版), 2015, 45(6): 1924-1932. |
| [11] | 李贤涛,张葆,赵春蕾,孙敬辉,毛大鹏,沈宏海. 基于自适应的自抗扰控制技术提高扰动隔离度[J]. 吉林大学学报(工学版), 2015, 45(1): 202-208. |
| [12] | 毕永涛, 贺风华, 姚郁. 敏捷导弹直接侧向力与气动力复合控制策略[J]. 吉林大学学报(工学版), 2011, 41(02): 590-0596. |
|
||