吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (12): 3335-3341.doi: 10.13229/j.cnki.jdxbgxb.20220046
• 车辆工程·机械工程 • 上一篇
基于防抱死制动系统制动器带宽参数整定的自抗扰控制器滑移率控制
苑磊( ),何仁()
),何仁()
- 江苏大学 汽车与交通工程学院,江苏 镇江 212013
Active disturbance rejection control of slip ratio based on antilock brake system brake bandwidth parameter tuning
Lei YUAN(),Ren HE()
- School of Automobile and Traffic Engineering,Jiangsu University,Zhenjiang 212013,China
摘要:
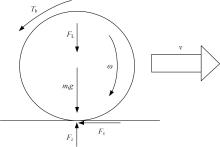
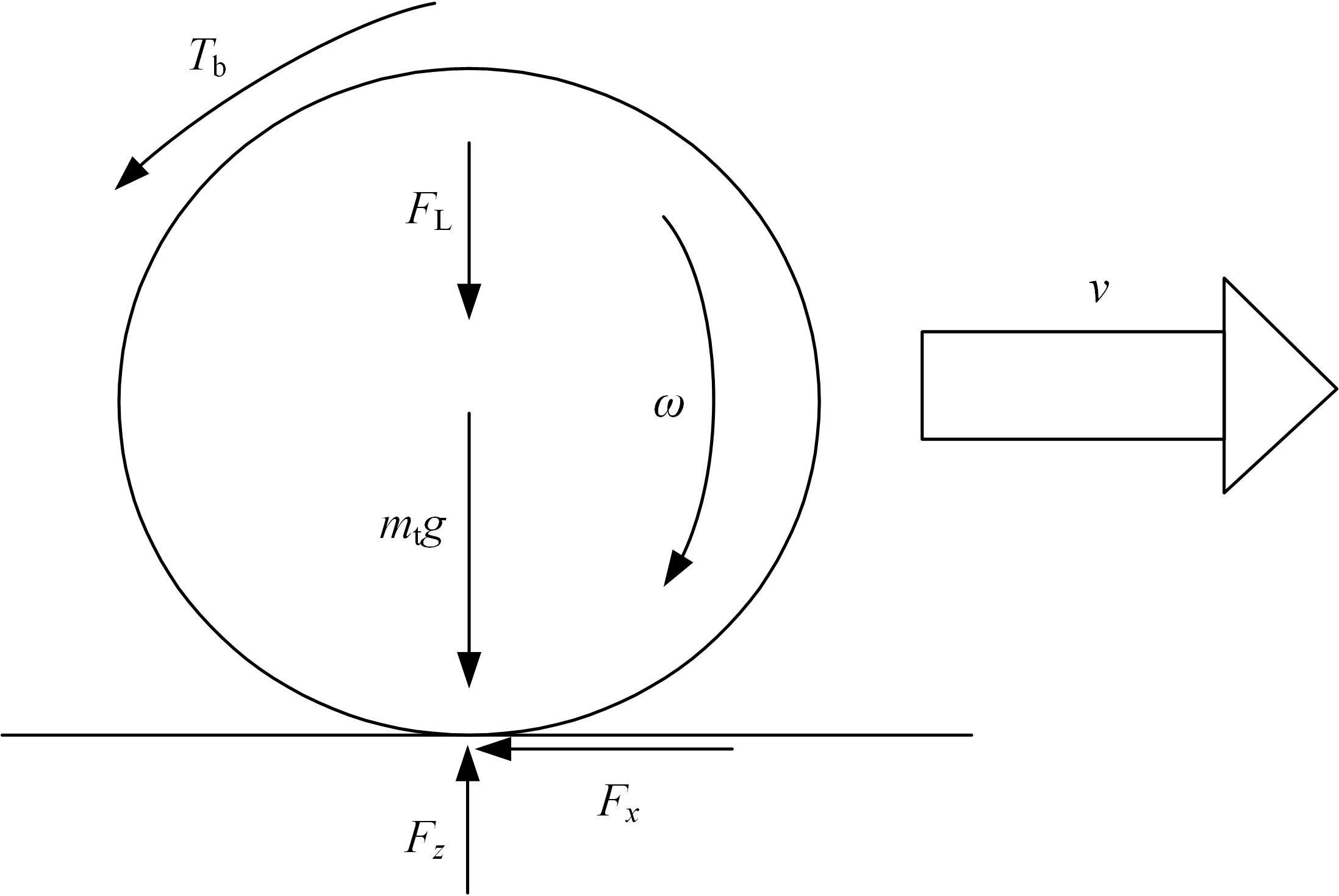
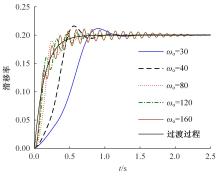
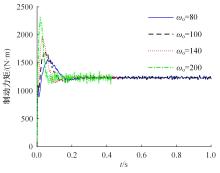
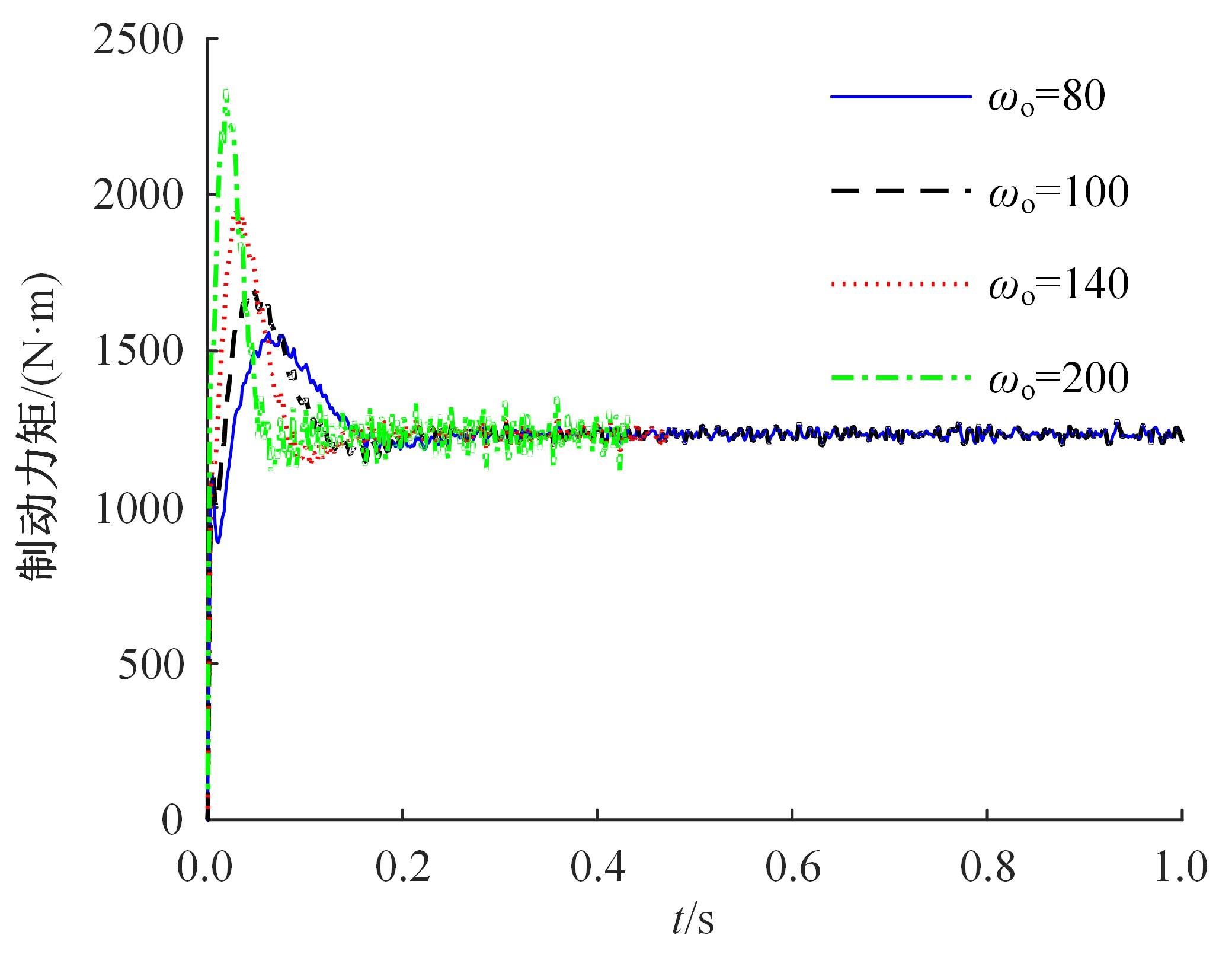
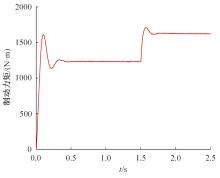
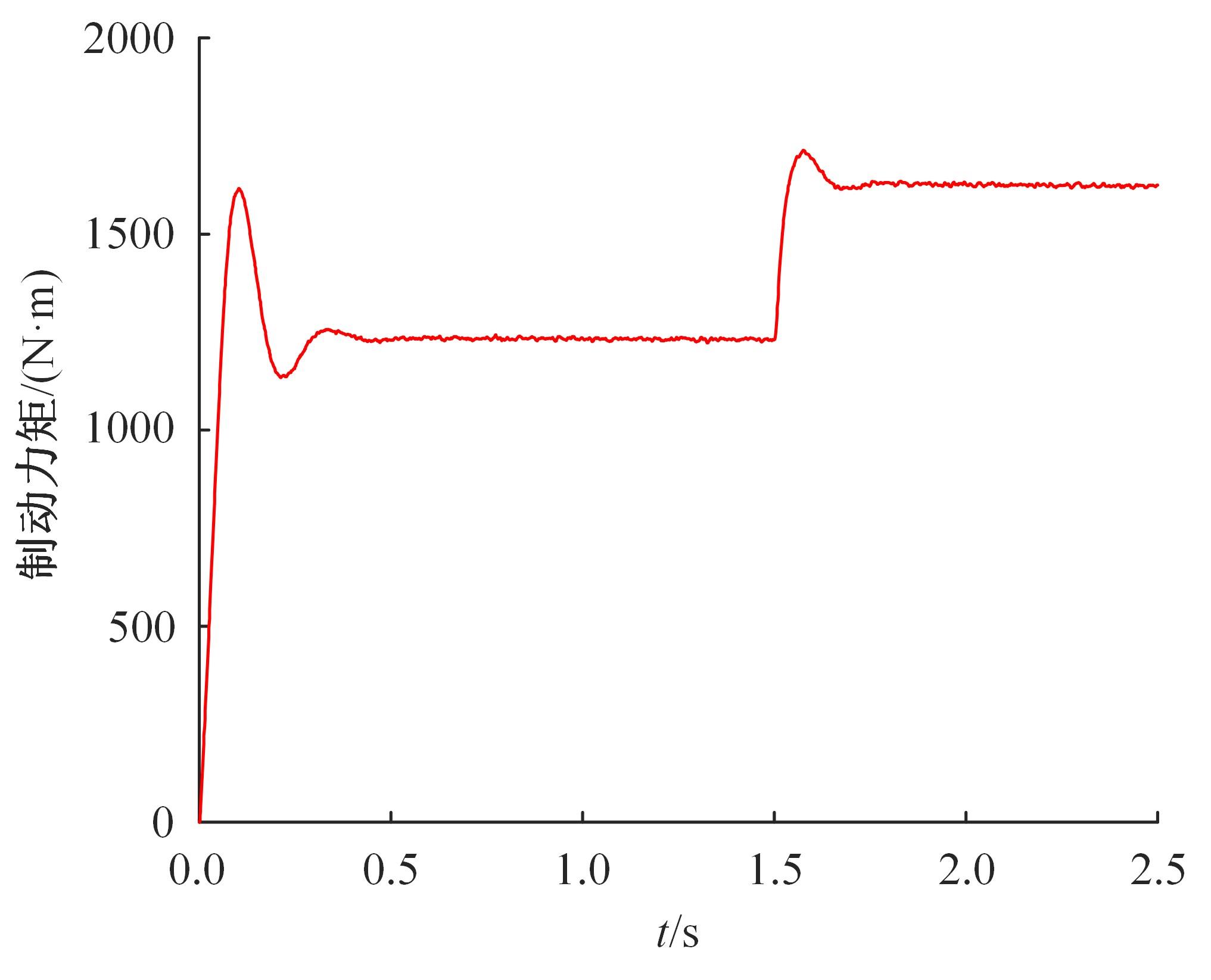
针对汽车紧急制动过程滑移率控制存在的非线性和不确定性扰动的问题以及制动系统带宽特性的差异导致滑移率控制器无法有效移植到实际车辆应用的问题,提出了基于执行器带宽参数整定的自抗扰控制方法。首先,建立了车辆模型和ABS模型。其次,设计了以微分跟踪器、扩展状态观测器和误差反馈控制器为核心的自抗扰控制。接着,基于ABS制动带宽参数,对自抗扰控制进行参数整定。最后,进行了滑移率控制仿真分析,验证了ABS滑移率自抗扰控制方法的可行性和有效性。结果表明,本文方法物理意义明确、参数整定简单、可移植性强,能够实现滑移率的精确控制。
中图分类号:
- U461.3


| 1 | Li W, Du H, Li W. Four-wheel electric braking system configuration with new braking torque distribution strategy for improving energy recovery efficiency[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 87-103. |
| 2 | 王骏骋, 何仁. 面向全制动工况的液压制动双环预测控制策略[J]. 吉林大学学报: 工学版, 2020, 50(3): 820-833. |
| Wang Jun-cheng, HE Ren. Double-loop predictive control scheme of hydraulic braking system for all braking conditions[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(3): 820-833. | |
| 3 | 余卓平, 韩伟, 徐松云, 等. 电子液压制动系统液压力控制发展现状综述[J]. 机械工程学报. 2017, 53(14): 1-15. |
| Yu Zhuo-ping, Han Wei, Xu Song-yun, et al. Review on hydraulic pressure control of electro-hydraulic brake system[J]. Journal of Mechanical Engineering, 2017, 53(14): 1-15. | |
| 4 | 张家旭, 周时莹, 周洪亮, 等. 未知时变扰动下的车轮滑移率鲁棒非线性跟踪控制[J]. 东南大学学报: 自然科学版, 2020, 50(6): 1128-1133. |
| Zhang Jia-xu, Zhou Shi-ying, Zhou Hong-liang, et al. Robust nonlinear tracking control of wheel slip with unknown time-varying disturbance[J]. Journal of Southeast University(Philosophy and Social Science), 2020, 50(6): 1128-1133. | |
| 5 | Mirzaei M, Mirzaeinejad H. Fuzzy scheduled optimal control of integrated vehicle braking and steering systems[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(5): 2369-2379. |
| 6 | Li S S, Guo L P, Zhang B C, et al. MPC-based slip control system for in-wheel-motor drive EV[J]. IFAC-PapersOnLine, 2018, 51(31): 578-582. |
| 7 | Sun J H, Xue X D, Cheng K W E. Fuzzy sliding mode wheel slip ratio control for smart vehicle anti-lock braking system[J]. Energies, 2019, 12(13): No. 22. |
| 8 | Han J. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics. 2009, 56(3): 900-906. |
| 9 | 李向阳, 高志强. 抗扰控制中的不变性原理[J]. 控制理论与应用, 2020, 37(2): 236-244. |
| Li Xiang-yang, Gao Zhi-qiang. The invariance principle in disturbance rejection control[J]. Control Theory & Applications, 2020, 37(2): 236-244. | |
| 10 | Gao Zhi-qiang. On the centrality of disturbance rejection in automatic control[J]. ISA Transactions, 2014, 53(4): 850-857. |
| 11 | 李杰, 齐晓慧, 夏元清, 等. 线性/非线性自抗扰切换控制方法研究[J]. 自动化学报, 2016, 42(2): 202-212. |
| Li Jie, Qi Xiao-hui, Xia Yuan-qing, et al. On linear/nonlinear active disturbance rejection switching control[J]. Acta Automatica Sinica, 2016, 42(2): 202-212. | |
| 12 | 韩京清. 自抗扰控制技术:估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008. |
| 13 | Guo B Z, Zhao Z L. On the convergence of an extended state observer for nonlinear systems with uncertainty[J]. Systems & Control Letters, 2011, 60(6): 420-430. |
| [1] | 陈兆玮,蒲前华. 弹性车轮对大跨斜拉桥车桥耦合振动的抑制特性[J]. 吉林大学学报(工学版), 2023, 53(9): 2519-2532. |
| [2] | 刘平义,李晓婷,高偌霖,李海涛,魏文军,王亚. 车辆侧倾驱动机构设计与试验[J]. 吉林大学学报(工学版), 2023, 53(8): 2185-2192. |
| [3] | 黄学劲,钟锦星,路京雨,赵霁,肖伟,袁新枚. 基于用户画像的电动汽车充电负荷预测方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2193-2200. |
| [4] | 张树培,夏明悦,张玮,陈钊,陈义祥. 考虑非线性刚度的间隙球铰碰撞动力学建模与仿真[J]. 吉林大学学报(工学版), 2023, 53(8): 2227-2235. |
| [5] | 陈辉,邵亚军. 基于惯性基准多传感器耦合的路面谱测量方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2254-2262. |
| [6] | 陈磊,王杨,董志圣,宋亚奇. 一种基于转向意图的车辆敏捷性控制策略[J]. 吉林大学学报(工学版), 2023, 53(5): 1257-1263. |
| [7] | 陈鑫,张冠宸,赵康明,王佳宁,杨立飞,司徒德蓉. 搭接焊缝对铝合金焊接结构轻量化设计的影响[J]. 吉林大学学报(工学版), 2023, 53(5): 1282-1288. |
| [8] | 张勇,毛凤朝,刘水长,王青妤,潘神功,曾广胜. 基于Laplacian算法的汽车外流场畸变网格优化[J]. 吉林大学学报(工学版), 2023, 53(5): 1289-1296. |
| [9] | 汪少华,储堃,施德华,殷春芳,李春. 基于有限时间扩张状态观测的HEV鲁棒复合协调控制[J]. 吉林大学学报(工学版), 2023, 53(5): 1272-1281. |
| [10] | 尹燕莉,黄学江,潘小亮,王利团,詹森,张鑫新. 基于PID与Q⁃Learning的混合动力汽车队列分层控制[J]. 吉林大学学报(工学版), 2023, 53(5): 1481-1489. |
| [11] | 于贵申,陈鑫,武子涛,陈轶雄,张冠宸. AA6061⁃T6铝薄板无针搅拌摩擦点焊接头结构及性能分析[J]. 吉林大学学报(工学版), 2023, 53(5): 1338-1344. |
| [12] | 田彦涛,黄兴,卢辉遒,王凯歌,许富强. 基于注意力与深度交互的周车多模态行为轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(5): 1474-1480. |
| [13] | 杨红波,史文库,陈志勇,郭年程,赵燕燕. 基于NSGA⁃II的斜齿轮宏观参数多目标优化[J]. 吉林大学学报(工学版), 2023, 53(4): 1007-1018. |
| [14] | 赵睿,李云,胡宏宇,高镇海. 基于V2I通信的交叉口车辆碰撞预警方法[J]. 吉林大学学报(工学版), 2023, 53(4): 1019-1029. |
| [15] | 陈小波,陈玲. 定位噪声统计特性未知的变分贝叶斯协同目标跟踪[J]. 吉林大学学报(工学版), 2023, 53(4): 1030-1039. |
|
||