吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (8): 2597-2610.doi: 10.13229/j.cnki.jdxbgxb.20231290
• 交通运输工程·土木工程 • 上一篇
考虑双重不确定性的智能车辆碰撞风险评估
赵睿1( ),袁其瑞1,连家俊1,高菲2(),胡宏宇2,高镇海2
),袁其瑞1,连家俊1,高菲2(),胡宏宇2,高镇海2
- 1.吉林大学 汽车工程学院,长春 130022
2.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
Intelligent vehicle collision risk assessment considering dual uncertainties
Rui ZHAO1(),Qi-rui YUAN1,Jia-jun LIAN1,Fei GAO2(),Hong-yu HU2,Zhen-hai GAO2
- 1.College of Automotive Engineering,Jilin University,Changchun 130022,China
2.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
摘要:
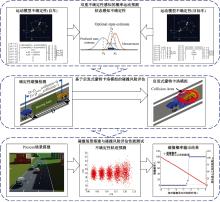
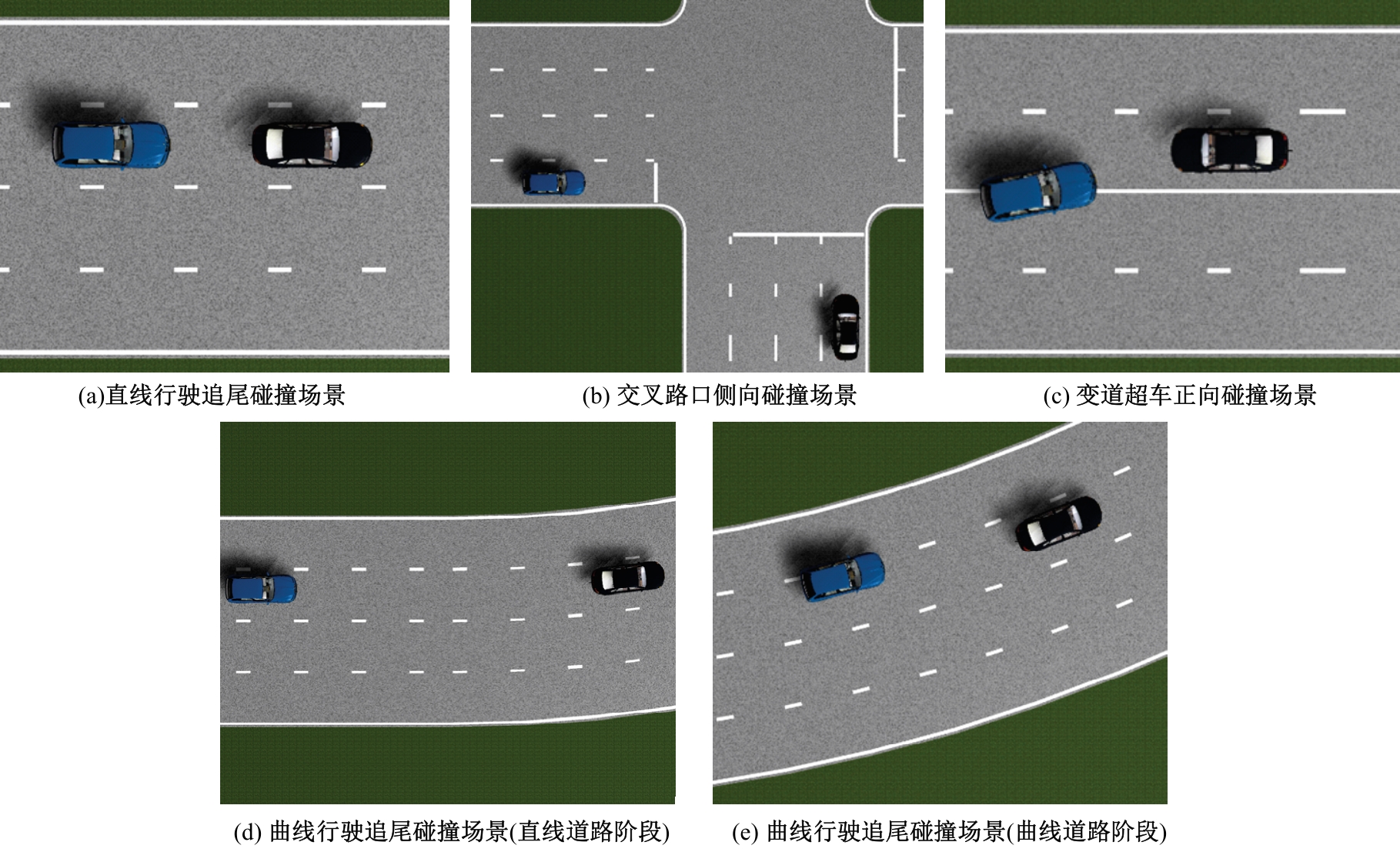
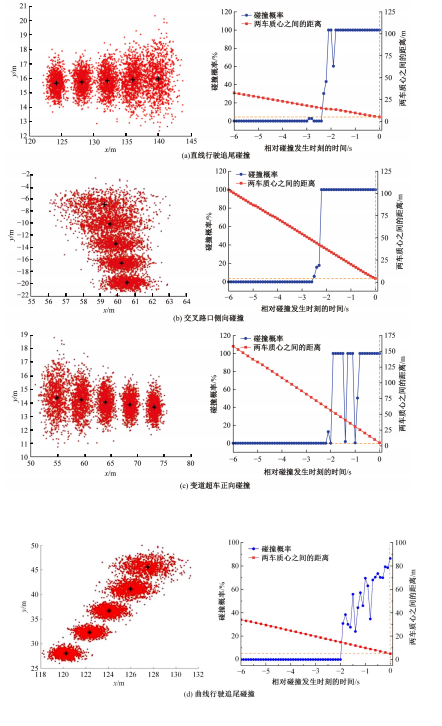
为了提高智能车辆的安全性,智能驾驶系统必须能够精准预测交通场景的演变以及准确评估潜在碰撞的风险,尤其是考虑到未来车辆状态和运动不确定性。针对这一问题,本文提出了一种考虑双重不确定性的碰撞风险评估方法,涵盖车辆多状态感知不确定性以及考虑驾驶员控制输入与道路几何因素的车辆运动模型不确定性。首先,采用扩展卡尔曼滤波器完成车辆状态估计,结合道路几何与驾驶员行为优化匹配运动模型,通过模型切换阈值确定以及横摆角速度权重分配实现了不同运动学模型切换,以使得模型更适配当前驾驶场景,进行更精准的不确定性车辆轨迹预测。其次,通过启发式蒙特卡洛模拟对采样轨迹点进行潜在碰撞的检验,并将碰撞风险量化为未来碰撞概率,其中确定性检测作为启发式信息以显著提高估计效率。最后,依据中国新车评价规程,在Prescan中搭建了4种典型碰撞场景,包括直线行驶追尾碰撞、交叉路口侧向碰撞、变道超车正向碰撞和曲线行驶追尾碰撞,用于验证和评估本文所提方法。结果表明,在多种碰撞场景中,本文提出的方法能够在车辆发生碰撞前2 s准确感知风险,并提供100%的碰撞概率预警,有效避免或减轻碰撞。
中图分类号:
- U491


| [1] | Huang C, Hang P, Hu Z, et al. Collision-probability-aware human-machine cooperative planning for safe automated driving[J]. IEEE Transactions on Vehicular Technology, 2021, 70(10): 9752-9763. |
| [2] | Katrakazas C, Quddus M, Chen W H. A new integrated collision risk assessment methodology for autonomous vehicles[J]. Accident Analysis & Prevention, 2019, 127: 61-79. |
| [3] | Tan H S, Huang J. DGPS-based vehicle-to-vehicle cooperative collision warning: Engineering feasibility viewpoints[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(4): 415-428. |
| [4] | Hillenbrand J, Spieker A M, Kroschel K. A multilevel collision mitigation approach—Its situation assessment, decision making, and performance tradeoffs[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(4): 528-540. |
| [5] | Noh S, An K. Decision-making framework for automated driving in highway environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 19(1): 58-71. |
| [6] | Chu K, Lee M, Sunwoo M. Local path planning for off-road autonomous driving with avoidance of static obstacles[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4): 1599-1616. |
| [7] | Kaempchen N, Schiele B, Dietmayer K. Situation assessment of an autonomous emergency brake for arbitrary vehicle-to-vehicle collision scenarios[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(4): 678-687. |
| [8] | Ferguson D, Darms M, Urmson C, et al. Detection, prediction, and avoidance of dynamic obstacles in urban environments[C]∥Proceedings of the 2008 IEEE Intelligent Vehicles Symposium. Eindhoven: IEEE, 2008: 1149-1154. |
| [9] | Yang Z, Shi C, Zheng Y, et al. A study on a vehicle semi-active suspension control system based on road elevation identification[J]. Plos One, 2022, 17(6):No. e0269406. |
| [10] | Greene D, Liu J, Reich J, et al. An efficient computational architecture for a collision early-warning system for vehicles, pedestrians, and bicyclists[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 942-953. |
| [11] | Kim J H, Kum D S. Threat prediction algorithm based on local path candidates and surrounding vehicle trajectory predictions for automated driving vehicles[C]∥Proceedings of the 2015 IEEE Intelligent Vehicles Symposium. Seoul: IEEE, 2015: 1220-1225. |
| [12] | Kim J, Kum D. Collision risk assessment algorithm via lane-based probabilistic motion prediction of surrounding vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 19(9): 2965-2976. |
| [13] | Toledo M R, Zamora I M A. IMM-based lane-change prediction in highways with low-cost GPS/INS[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(1): 180-185. |
| [14] | Kasper D, Weidl G, Dang T, et al. Object-oriented bayesian networks for detection of lane change maneuvers[J]. IEEE Intelligent Transportation Systems Magazine, 2012, 4(3): 19-31. |
| [15] | Schreier M, Willert V, Adamy J. An integrated approach to maneuver-based trajectory prediction and criticality assessment in arbitrary road environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10): 2751-2766. |
| [16] | Kim I H, Bong J H, Park J, et al. Prediction of driver's intention of lane change by augmenting sensor information using machine learning techniques[J]. Sensors, 2017, 17(6): No.17061350. |
| [17] | Bahram M, Hubmann C, Lawitzky A, et al. A combined model-and learning-based framework for interaction-aware maneuver prediction[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(6): 1538-1550. |
| [18] | Bahram M, Lawitzky A, Friedrichs J, et al. A game-theoretic approach to replanning-aware interactive scene prediction and planning[J]. IEEE Transactions on Vehicular Technology, 2015, 65(6): 3981-3992. |
| [19] | Li Y, Yu R, Shahabi C, et al. Diffusion convolutional recurrent neural network: Data-driven traffic forecasting[J]. Arxiv Preprint, 2017, 7: No.170701926. |
| [20] | Gao H, Su H, Cai Y, et al. Trajectory prediction of cyclist based on dynamic Bayesian network and long short-term memory model at unsignalized intersections[J]. Science China Information Sciences, 2021, 64(7): No.172207. |
| [21] | Wang H, Lu B, Li J, et al. Risk assessment and mitigation in local path planning for autonomous vehicles with LSTM based predictive model[J]. IEEE Transactions on Automation Science and Engineering, 2021, 19(4): 2738-2749. |
| [22] | Deo N, Trivedi M M. Multi-modal trajectory prediction of surrounding vehicles with maneuver based lstms[C]∥Proceedings of the 2018 IEEE Intelligent Vehicles Symposium. Changshu: IEEE, 2018: 1179-1184. |
| [23] | Gao Z, Bao M, Gao F, et al. Probabilistic multi-modal expected trajectory prediction based on LSTM for autonomous driving[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023, 238: No. 09544070 231167906. |
| [24] | Sheng Z, Xu Y, Xue S, et al. Graph-based spatial-temporal convolutional network for vehicle trajectory prediction in autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 17654-17665. |
| [25] | Sui Z, Zhou Y, Zhao X, et al. Joint intention and trajectory prediction based on transformer[C]∥Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Prague:IEEE, 2021: 7082-7088. |
| [26] | Chen X, Zhang H, Zhao F, et al. Vehicle trajectory prediction based on intention-aware non-autoregressive transformer with multi-attention learning for Internet of Vehicles[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-12. |
| [27] | Huang Y, Du J, Yang Z, et al. A survey on trajectory-prediction methods for autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(3): 652-674. |
| [28] | Joerer S, Segata M, Bloessl B, et al. A vehicular networking perspective on estimating vehicle collision probability at intersections[J]. IEEE Transactions on Vehicular Technology, 2013, 63(4): 1802-1812. |
| [29] | Campos G R, Runarsson A H, Granum F, et al. Collision avoidance at intersections: A probabilistic threat-assessment and decision-making system for safety interventions[C]∥Proceedings of the 2014 IEEE 17th International IEEE Conference on Intelligent Transportation Systems (ITSC). Qingdao:IEEE, 2014: 649-654. |
| 30] Tan H S, Huang J. DGPS-based vehicle-to-vehicle cooperative collision warning: Engineering feasibility viewpoints[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(4): 415-428. | |
| [31] | Tao L, Watanabe Y, Li Y, et al. Collision risk assessment service for connected vehicles: Leveraging vehicular state and motion uncertainties[J]. IEEE Internet of Things Journal, 2021, 8(14): 11548-11560. |
| [32] | Lambert A, Gruyer D, Saint Pierre G. A fast monte carlo algorithm for collision probability estimation[C]∥Proceedings of the 10th International Conference on Control, Automation, Robotics and Vision. Hanoi: IEEE, 2008: 406-411. |
| [33] | Ammoun S, Nashashibi F. Real time trajectory prediction for collision risk estimation between vehicles[C]∥Proceedings of the IEEE 5Th International Conference on Intelligent Computer Communication and Processing. Cluj-Napoca: IEEE, 2009: 417-422. |
| [34] | Houénou A, Bonnifait P, Cherfaoui V. Risk assessment for collision avoidance systems[C]∥Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC). Qingdao: IEEE, 2014: 386-391. |
| [35] | Lee K, Peng H. Evaluation of automotive forward collision warning and collision avoidance algorithms[J]. Vehicle System Dynamics, 2005, 43(10): 735-751. |
| [36] | Lambert A, Gruyer D, Saint P G. A fast monte carlo algorithm for collision probability estimation[C]∥Proceedings of the 10th International Conference on Control, Automation, Robotics and Vision. Hanoi: IEEE, 2008: 406-411. |
| [1] | 王健,贾晨威. 面向智能网联车辆的轨迹预测模型[J]. 吉林大学学报(工学版), 2025, 55(6): 1963-1972. |
| [2] | 胡宏宇,张争光,曲优,蔡沐雨,高菲,高镇海. 基于双分支和可变形卷积网络的驾驶员行为识别方法[J]. 吉林大学学报(工学版), 2025, 55(1): 93-104. |
| [3] | 黄玲,崔躜,游峰,洪佩鑫,钟浩川,曾译萱. 适用于多车交互场景的车辆轨迹预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1188-1195. |
| [4] | 高镇海,蔡荣贵,孙天骏,于桐,赵浩源,班浩. 人机共驾下的驾驶行为数据滤波方法[J]. 吉林大学学报(工学版), 2024, 54(3): 589-599. |
| [5] | 田彦涛,黄兴,卢辉遒,王凯歌,许富强. 基于注意力与深度交互的周车多模态行为轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(5): 1474-1480. |
| [6] | 田彦涛,许富强,王凯歌,郝子绪. 考虑周车信息的自车期望轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 674-681. |
| [7] | 刘嫣然,孟庆瑜,郭洪艳,李嘉霖. 图注意力模式下融合高精地图的周车轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 792-801. |
| [8] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [9] | 贾彦峰,曲大义,林璐,姚荣涵,马晓龙. 基于运行轨迹的网联混合车流速度协调控制[J]. 吉林大学学报(工学版), 2021, 51(6): 2051-2060. |
| [10] | 宗长富,文龙,何磊. 基于欧几里得聚类算法的三维激光雷达障碍物检测技术[J]. 吉林大学学报(工学版), 2020, 50(1): 107-113. |
| [11] | 管欣, 崔文锋, 贾鑫. 车辆纵向速度分相控制[J]. 吉林大学学报(工学版), 2013, 43(02): 273-277. |
| [12] | 赵越,刘衍珩,余雪岗,魏达,单长伟,赵洋3 . 基于模式挖掘与匹配的移动轨迹预测方法[J]. 吉林大学学报(工学版), 2008, 38(05): 1125-1130. |
|
||