吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 792-801.doi: 10.13229/j.cnki.jdxbgxb20221259
• 通信与控制工程 • 上一篇
图注意力模式下融合高精地图的周车轨迹预测
刘嫣然1,2( ),孟庆瑜1,2,郭洪艳1,2(),李嘉霖1,2
),孟庆瑜1,2,郭洪艳1,2(),李嘉霖1,2
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.吉林大学 通信工程学院,长春 130022
Vehicle trajectory prediction combined with high definition map in graph attention mode
Yan-ran LIU1,2(),Qing-yu MENG1,2,Hong-yan GUO1,2(),Jia-lin LI1,2
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
摘要:
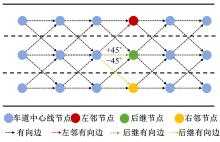
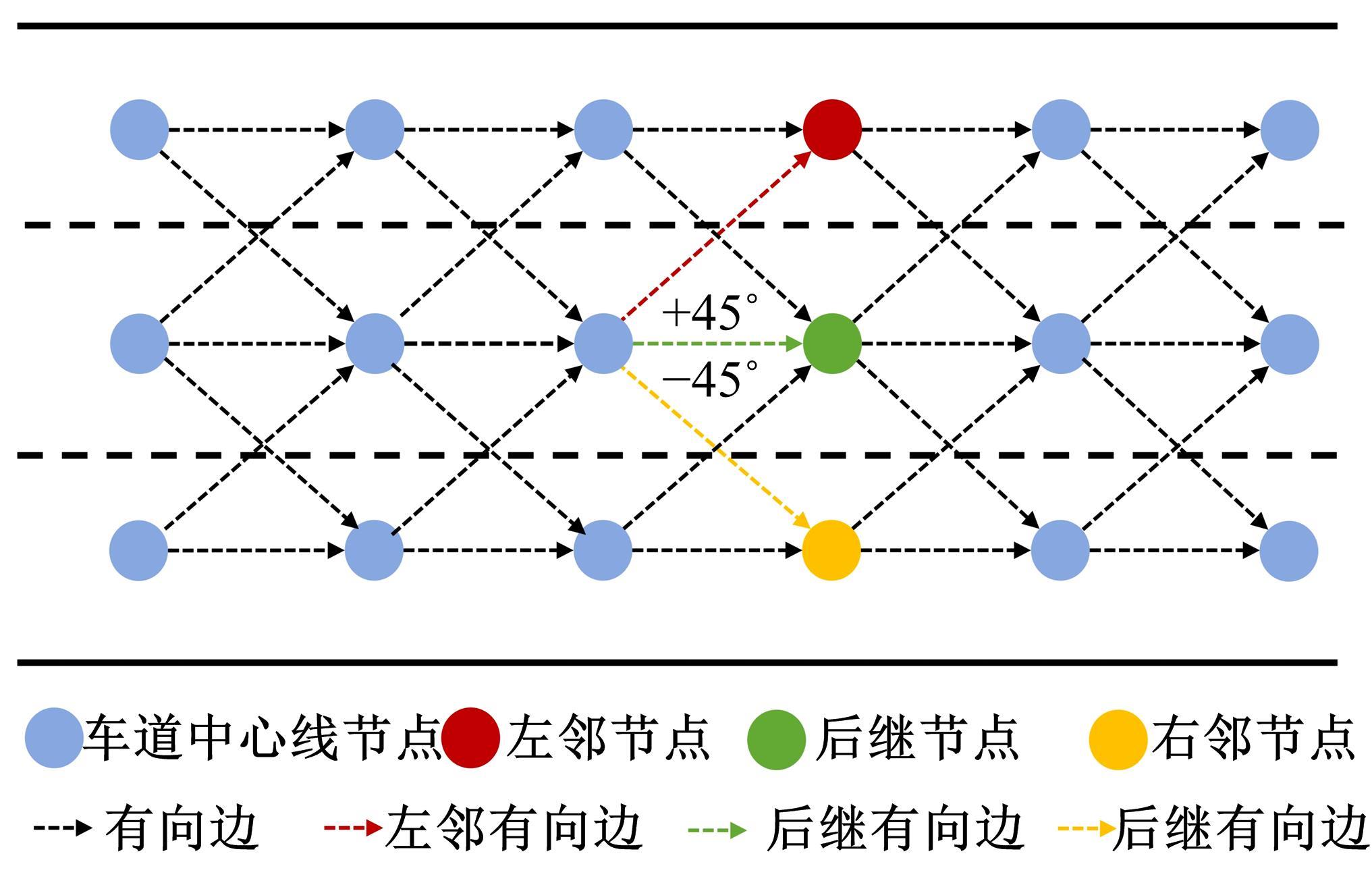
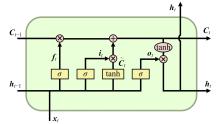
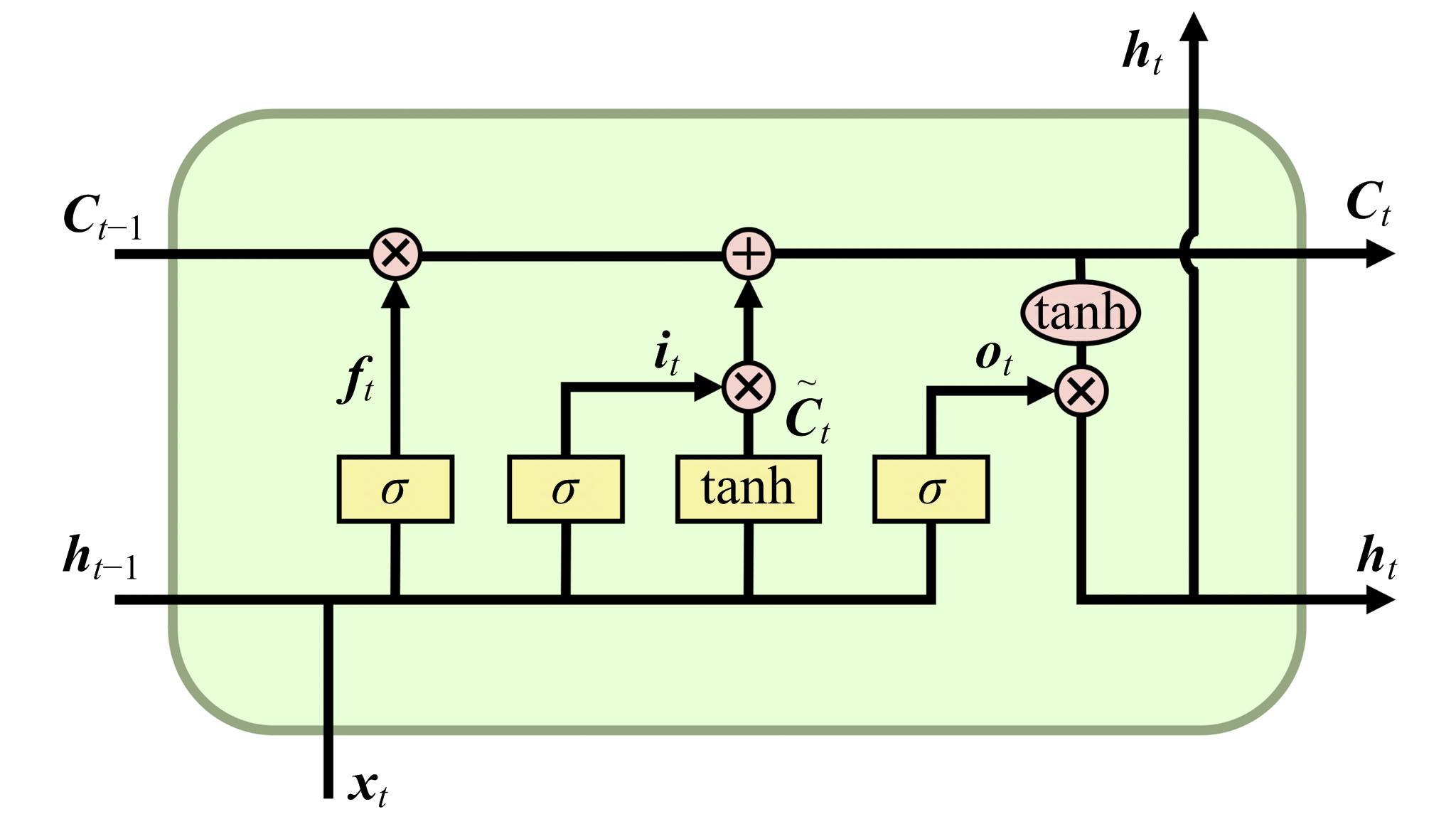
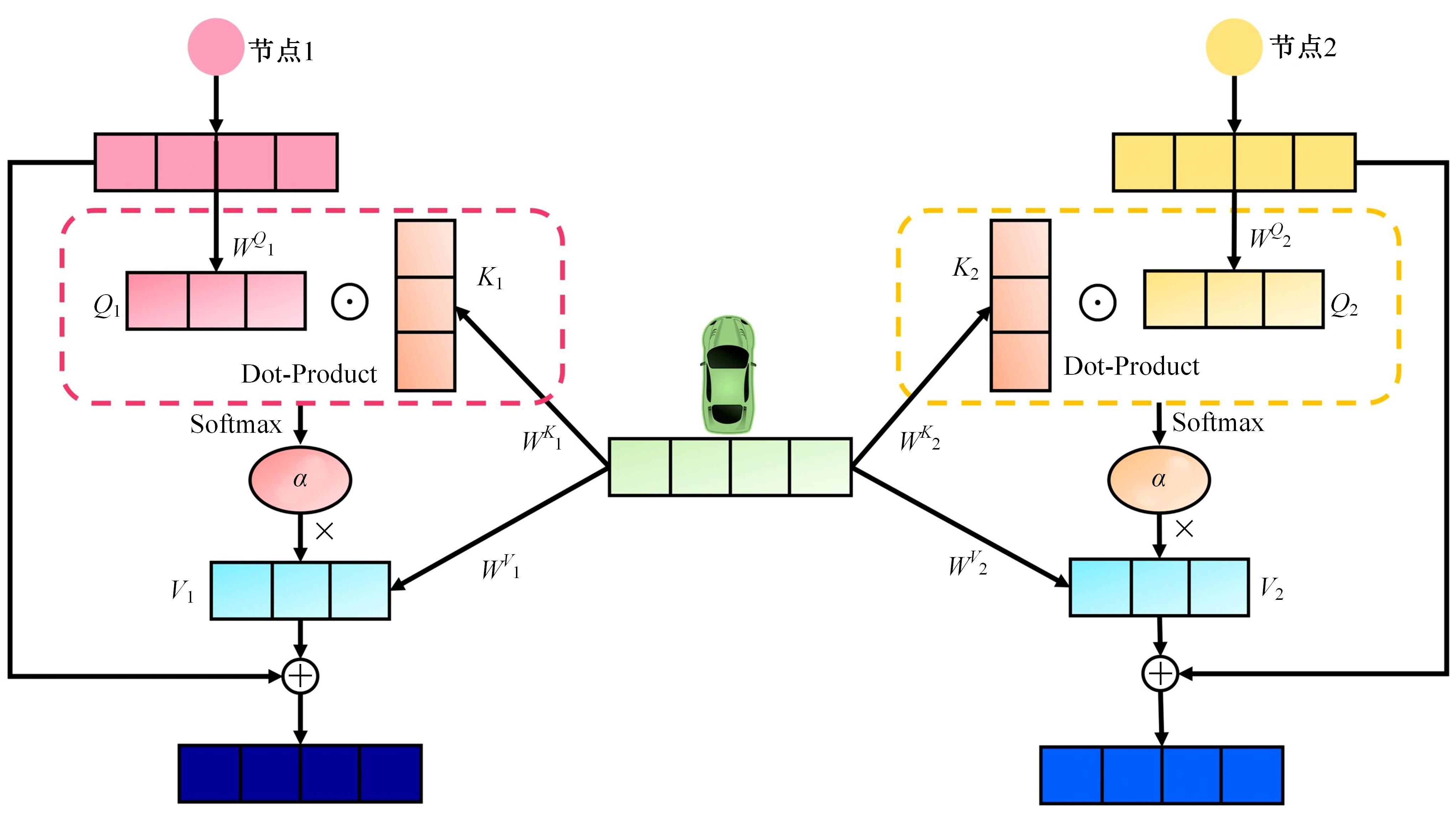
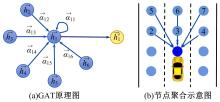
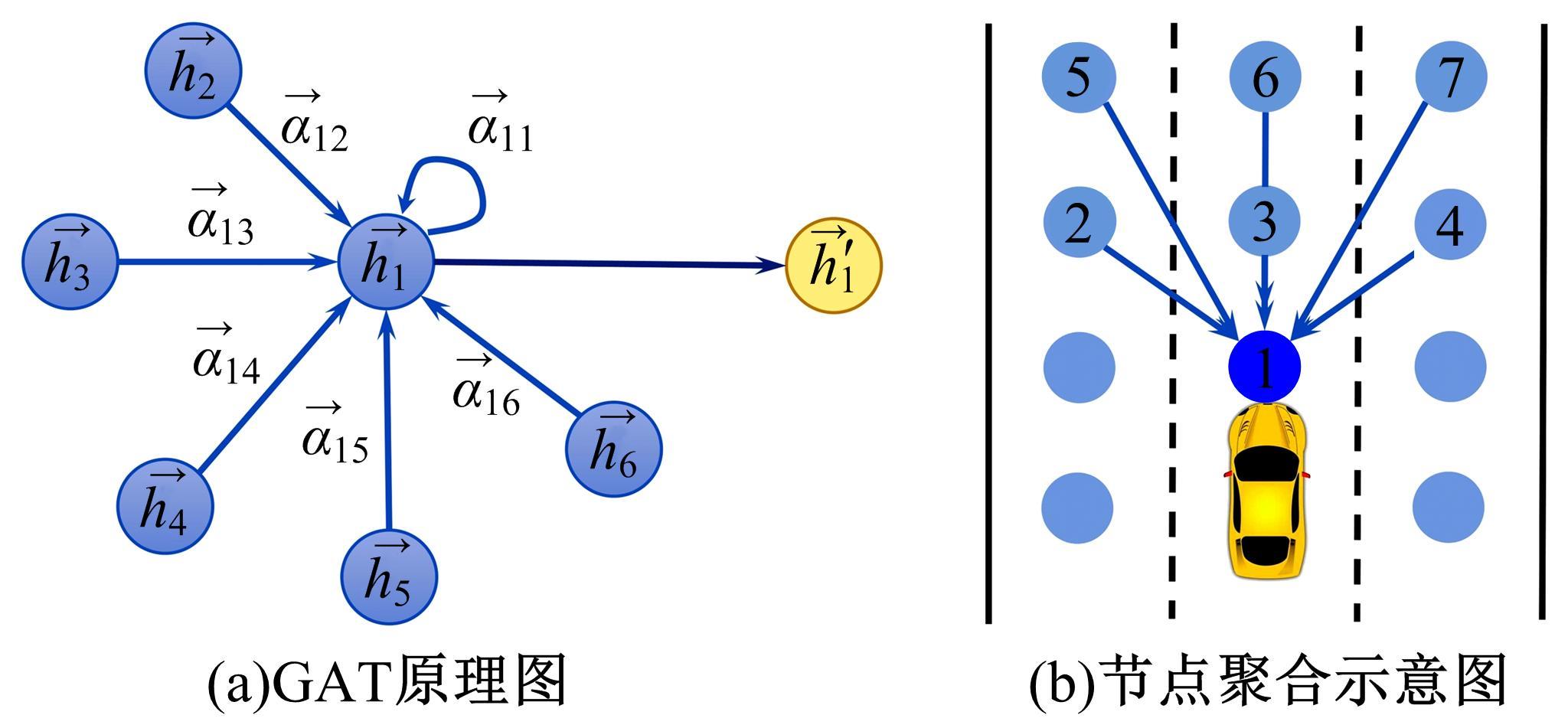
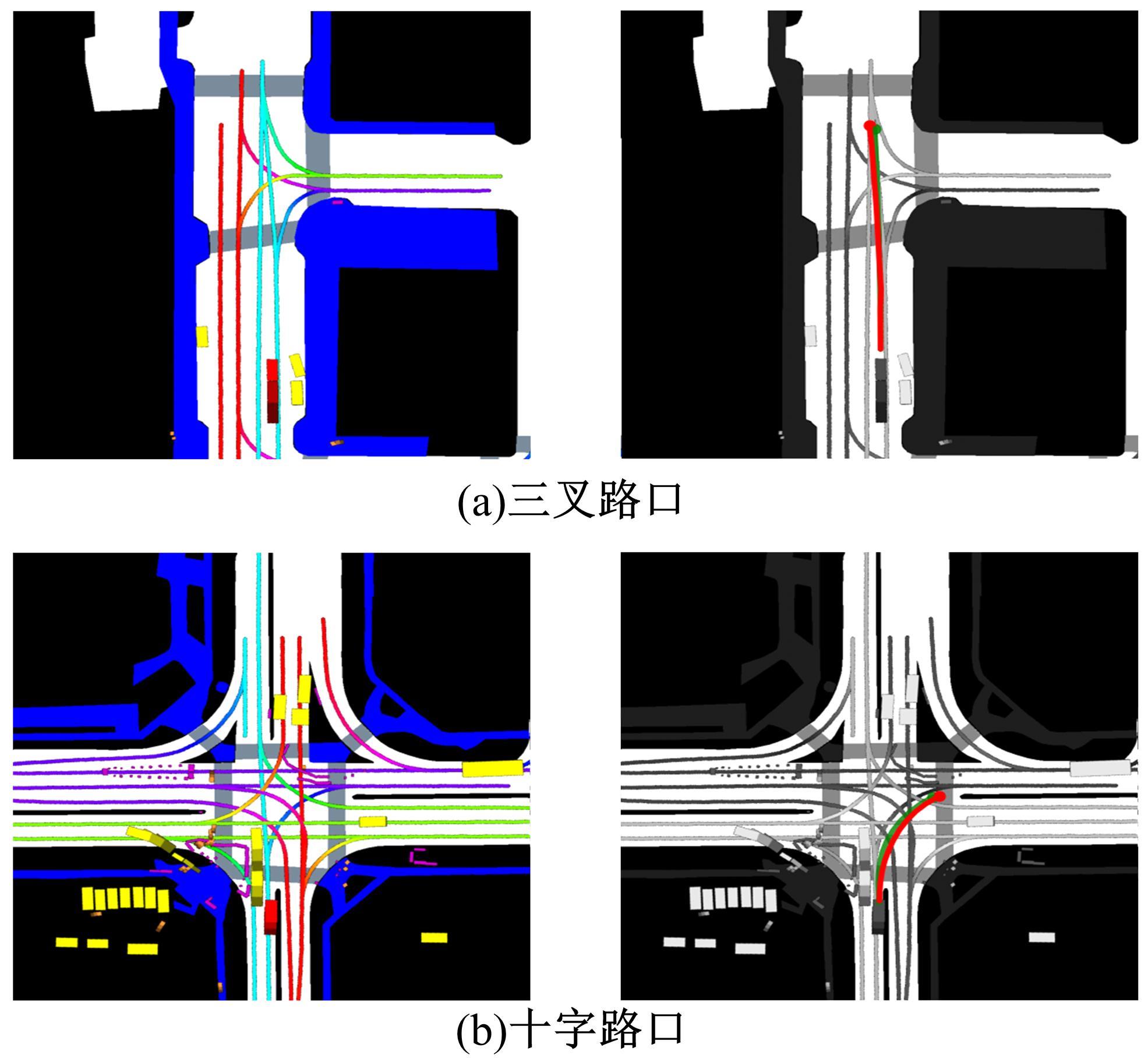
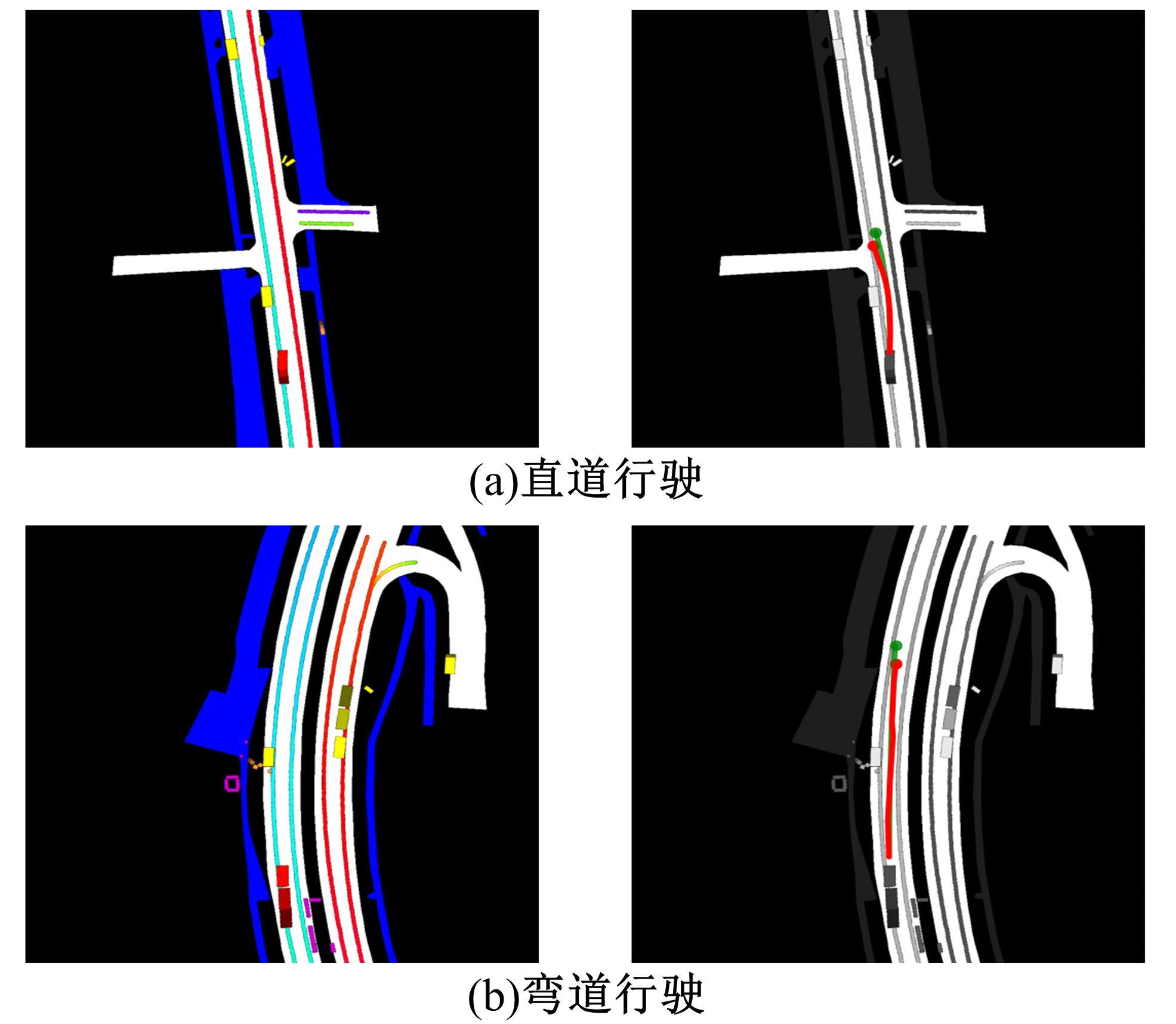
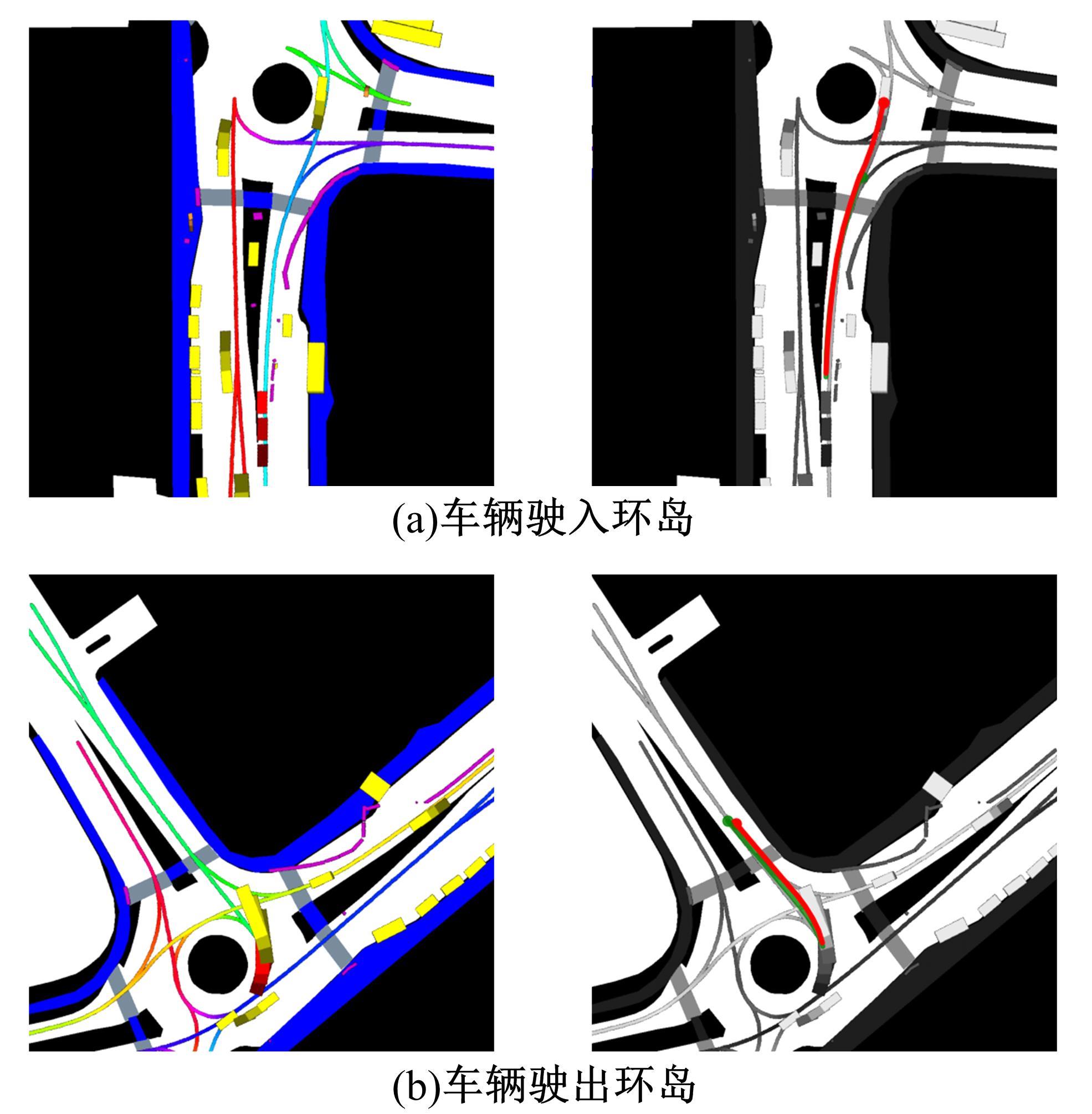
为了准确、合理地预测车辆未来轨迹并且理解周围交通流的变化,提出了一种图注意力模式下融合高精地图的轨迹预测方法。设计了基于长短期记忆(LSTM)网络的编码-解码框架,建立了以车辆历史状态和高精地图信息为输入的模型结构,提出了结合车辆局部特征和全局特征的图查询机制输出车辆预测轨迹。在公开数据集nuScenes上的实验结果表明,该模型的综合预测性能优于Traj++、CoverNet等其他先进方法,且具有良好的抗干扰性。
中图分类号:
- U495

| 1 | Hou Lian, Xin Long, Li Sheng-bo, et al. Interactive trajectory prediction of surrounding road users for autonomous driving using structural-LSTM network[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(11): 4615-4625. |
| 2 | Ess A, Schindler K, Leibe B, et al. Object detection and tracking for autonomous navigation in dynamic environments[J]. The International Journal of Robotics Research, 2010, 29(14): 1707-1725. |
| 3 | 李建平. 面向智能驾驶的交通车辆运动预测方法研究[D]. 长春: 吉林大学汽车工程学院, 2018. |
| Li Jian-ping. Study on motion prediction of traffic vehicles for intelligent driving[D]. Changchun: College of Automotive Engineering, Jilin University, 2018. | |
| 4 | Luber M, Stork J A, Tipaldi G D, et al. People tracking with human motion predictions from social forces[C]∥2010 IEEE International Conference on Robotics and Automation, Anchorage, USA, 2010: 464-469. |
| 5 | Alahi A, Goel K, Ramanathan V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 961-971. |
| 6 | 季学武, 费聪, 何祥坤, 等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6): 34-42. |
| Ji Xue-wu, Fei Cong, He Xiang-kun, et al. Intention recognition and trajectory prediction for vehicles using LSTM network[J]. China Journal of Highway and Transport, 2019, 32(6): 34-42. | |
| 7 | Kim B, Kang C, Kim J, et al. Probabilistic vehicle trajectory prediction over occupancy grid map via recurrent neural network[C]∥2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 2017: 399-404. |
| 8 | Pan Jia-cheng, Sun Hong-yi, Xu Ke-cheng, et al. Lane-attention: predicting vehicles' moving trajectories by learning their attention over lanes[C]∥2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, USA, 2020: 7949-7956. |
| 9 | Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[J/OL]. [2022-09-20]. |
| 10 | 田彦涛, 黄兴, 卢辉遒, 等. 基于注意力与深度交互的周车多模态行为轨迹预测[J/OL]. [2022-09-20]. |
| 11 | Guo Hong-yan, Meng Qing-yu, Cao Dong-pu, et al. Vehicle trajectory prediction method coupled with ego vehicle motion trend under dual attention mechanism[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-16. |
| 12 | Deo N, Trivedi M M. Convolutional social pooling for vehicle trajectory prediction[C]∥Proceedings of the IEEE conference on computer vision and pattern recognition, Salt Lake City, USA, 2018: 1468-1476. |
| 13 | Li Zi-rui, Gong Jian-wei, Lu Chao, et al. Interactive behavior prediction for heterogeneous traffic participants in the urban road: a graph-neural-network-based multitask learning framework[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(3): 1339-1349. |
| 14 | Agrim G, Justin J, Li F F, et al. Social GAN: socially acceptable trajectories with generative adversarial networks[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 2255-2264. |
| 15 | Caesar H, Bankiti V, Lang A H, et al. Nuscenes: a multi-modal dataset for autonomous driving[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 11621-11631. |
| 16 | Salzmann T, Ivanovic B, Chakravarty P, et al. Trajectron++: dynamically-feasible trajectory forecasting with heterogeneous data[C]∥European Conference on Computer Vision, Glasgow, UK, 2020: 683-700. |
| 17 | Phan-minh T, Grigore E C, Boulton F A, et al. Covernet: multimodal behavior prediction using trajectory sets[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 14074-14083. |
| 18 | Wang Chu-hua, Wang Yu-chen, Xu Ming-ze, et al. Stepwise goal-driven networks for trajectory prediction[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2716-2723. |
| 19 | Messaoud K, Deo N, Trivedi M M, et al. Multi-head attention with joint agent-map representation for trajectory prediction in autonomous driving[J/OL]. [2022-09-25]. |
| 20 | Gilles T, Sabatini S, Tsishkou D, et al. Gohome: graph-oriented heatmap output for future motion estimation[C]∥2022 International Conference on Robotics and Automation (ICRA), Philadelphia, USA, 2022: 9107-9114. |
| 21 | Luo C X, Sun L, Dabiri D, et al. Probabilistic multi-modal trajectory prediction with lane attention for autonomous vehicles[C]∥2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, USA, 2020: 2370-2376. |
| [1] | 田彦涛,许富强,王凯歌,郝子绪. 考虑周车信息的自车期望轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 674-681. |
| [2] | 高松,王玉琼,王玉海,徐艺,周英超,王鹏伟. 智能汽车纵横向整体反馈线性化控制[J]. 吉林大学学报(工学版), 2023, 53(3): 735-745. |
| [3] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [4] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [5] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [6] | 张建,刘金波,高原,刘梦可,高振海,杨彬. 基于多模交互的车载传感器定位算法[J]. 吉林大学学报(工学版), 2023, 53(3): 772-780. |
| [7] | 何科,丁海涛,许男,郭孔辉. 基于摄像头和车道线的增强定位系统[J]. 吉林大学学报(工学版), 2023, 53(3): 663-673. |
| [8] | 朱冰,范天昕,赵健,张培兴,孙宇航. 基于危险边界搜索的自动驾驶系统加速测试方法[J]. 吉林大学学报(工学版), 2023, 53(3): 704-712. |
| [9] | 王登峰,陈宏利,那景新,陈鑫. 单双搭接接头经高温老化后的失效对比[J]. 吉林大学学报(工学版), 2023, 53(2): 346-354. |
| [10] | 张佩,王志伟,杜常清,颜伏伍,卢炽华. 车用质子交换膜燃料电池空气系统过氧比控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 1996-2003. |
| [11] | 隗海林,王泽钊,张家祯,刘洋. 基于Avl-Cruise的燃料电池汽车传动比及能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2119-2129. |
| [12] | 刘岩,丁天威,王宇鹏,都京,赵洪辉. 基于自适应控制的燃料电池发动机热管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2168-2174. |
| [13] | 李丞,景浩,胡广地,刘晓东,冯彪. 适用于质子交换膜燃料电池系统的高阶滑模观测器[J]. 吉林大学学报(工学版), 2022, 52(9): 2203-2212. |
| [14] | 王克勇,鲍大同,周苏. 基于数据驱动的车用燃料电池故障在线自适应诊断算法[J]. 吉林大学学报(工学版), 2022, 52(9): 2107-2118. |
| [15] | 曹起铭,闵海涛,孙维毅,于远彬,蒋俊宇. 质子交换膜燃料电池低温启动水热平衡特性[J]. 吉林大学学报(工学版), 2022, 52(9): 2139-2146. |
|
||