吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (5): 1474-1480.doi: 10.13229/j.cnki.jdxbgxb.20210904
• 通信与控制工程 • 上一篇
基于注意力与深度交互的周车多模态行为轨迹预测
田彦涛1,2( ),黄兴1,卢辉遒1,王凯歌1,许富强1
),黄兴1,卢辉遒1,王凯歌1,许富强1
- 1.吉林大学 通信工程学院,长春 130022
2.吉林大学 工程仿生教育部重点实验室,长春 130022
Multi⁃mode behavior trajectory prediction of surrounding vehicle based on attention and depth interaction
Yan-tao TIAN1,2(),Xing HUANG1,Hui-qiu LU1,Kai-ge WANG1,Fu-qiang XU1
- 1.College of Communication Engineering,Jilin University,Changchun 130022,China
2.Key Laboratory of Bionic Engineering,Ministry of Education,Jilin University,Changchun 130022,China
摘要:
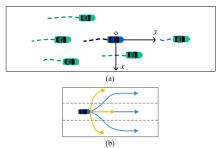
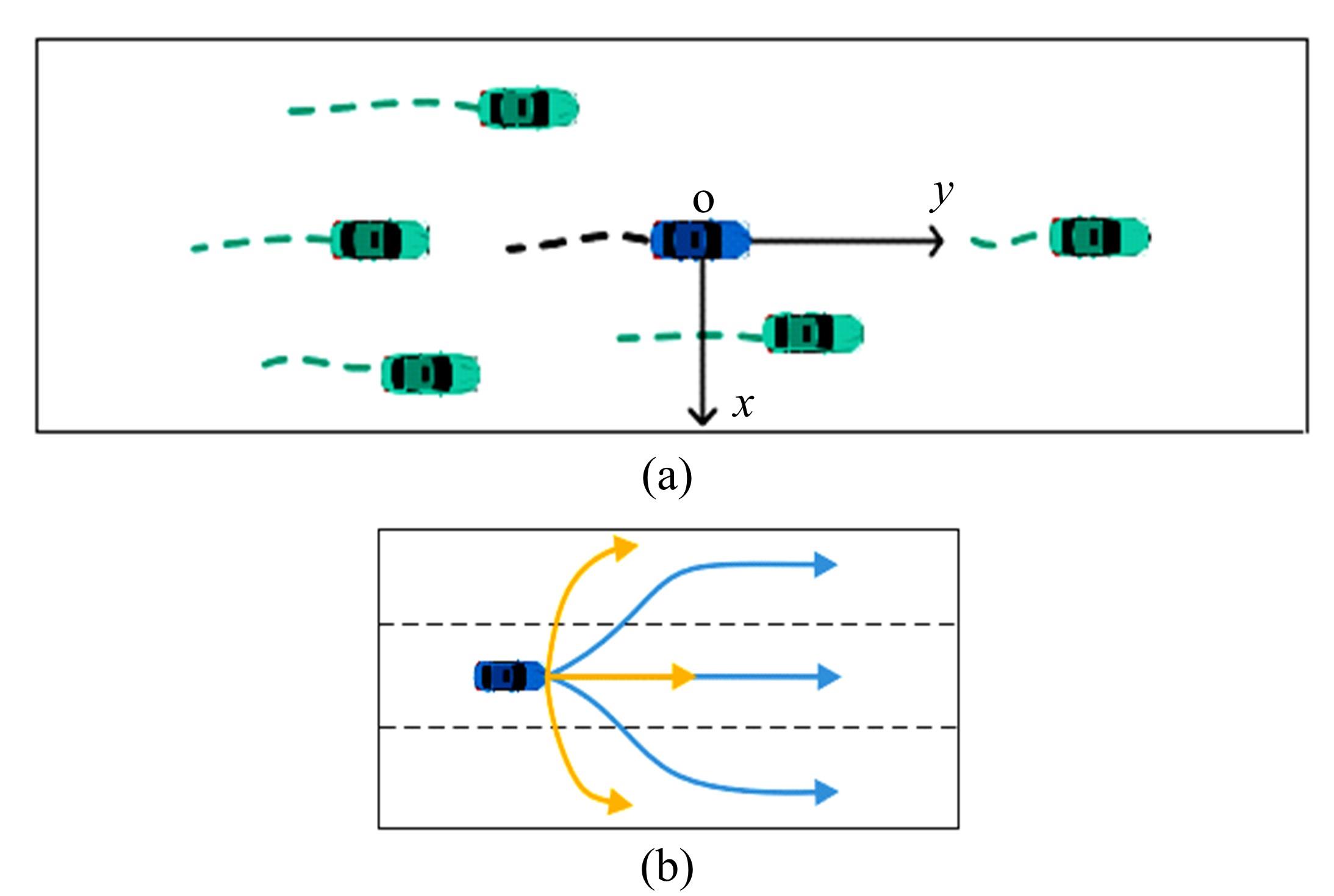
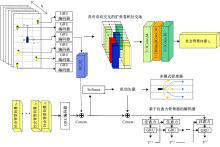
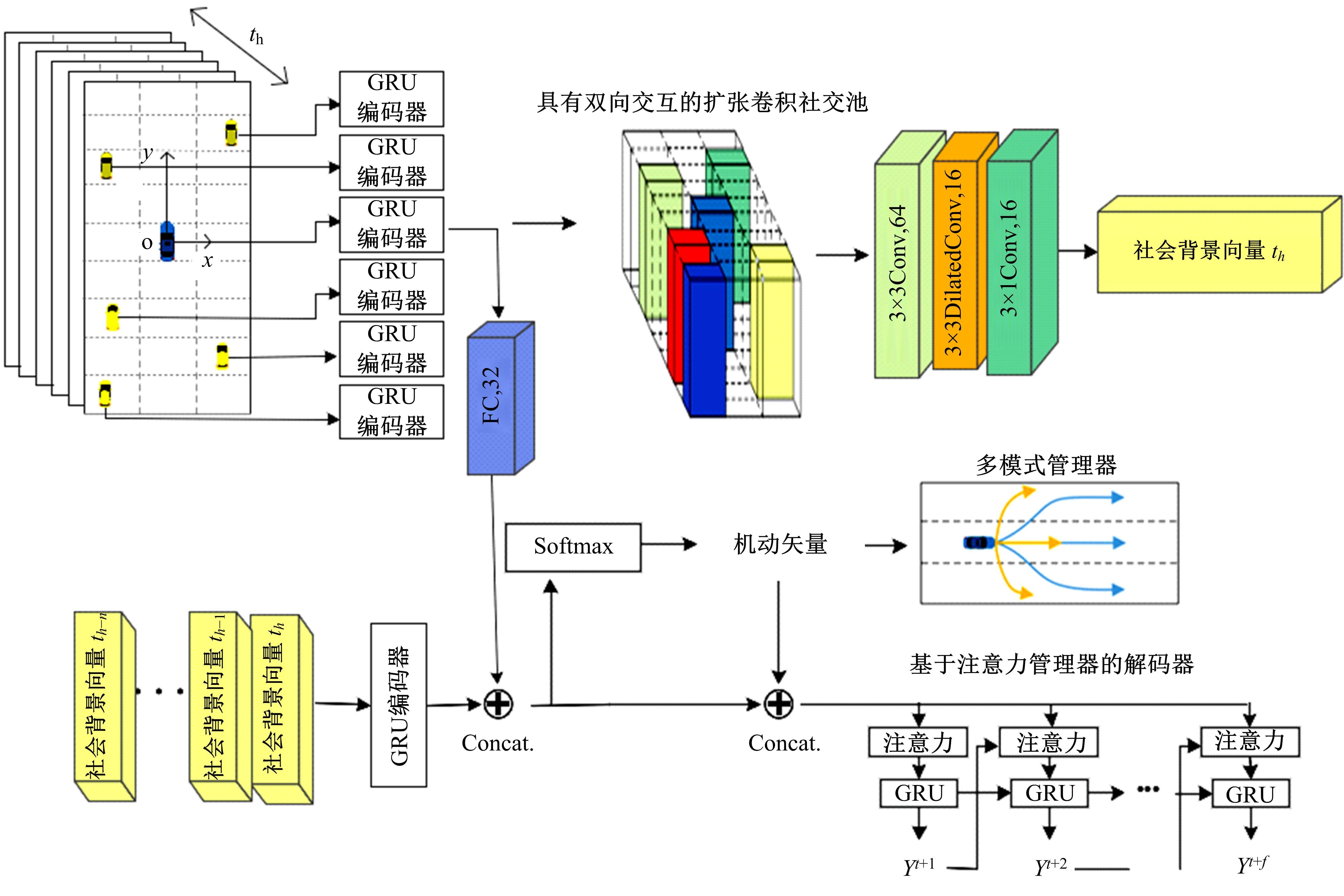
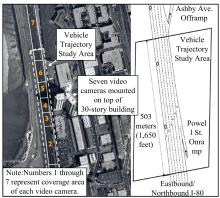
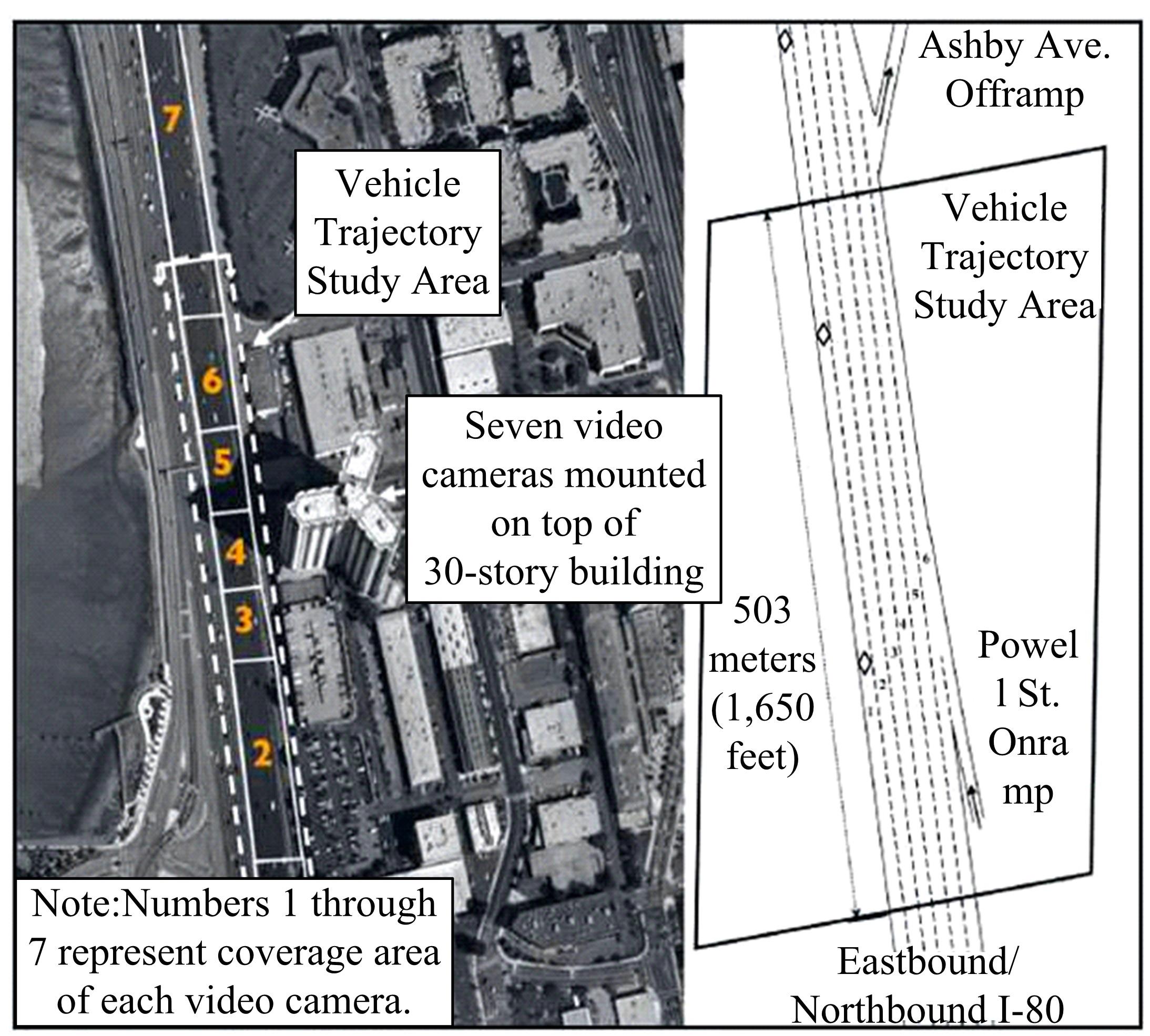
设计了一种车辆深度交互编码并结合基于注意力机制的解码器模型,该模型同时输出车辆多模态行为预测结果和未来轨迹预测分布。使用公开的NGSIM US-101和I-80数据集评估所提出的模型,并且对模型多模态行为机动预测进行了定性分析。结果表明:该模型具有较好的均方根误差值(RMSE),在提升了计算效率的基础上获得了更高的轨迹预测精度。
中图分类号:
- U495

| 1 | Lefèvre S, Vasquez D, Laugier C. A survey on motion prediction and risk assessment for intelligent vehicles [J]. Robomech Journal, 2014, 1(1): 1-14. |
| 2 | Ammous S, Nashashibi F. Real time trajectory prediction for collision risk estimation between vehicles [C]∥IEEE 5th Internationgal Conference on Intelligent Computer Communication and Proceding, Cluj-Napoca, Romania, 2009: 417-422. |
| 3 | Broadhurst A, Baker S, Kanade T. Monte carlo road safety reasoning[C]∥IEEE Intelligent Vehicles Symposium Proceedings,Las Vegas,USA,2005: 319-324. |
| 4 | Schreier M, Willert V, Adamy J. An integrated approach to maneuver-based trajectory prediction and criticality assessment in arbitrary road environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10): 2751-2766. |
| 5 | Zhang H, Geiger A, Urtasun R. Understanding high-level semantics by modeling traffic patterns[C]∥IEEE International Conference on Computer Vision, Sydney, Australia, 2013: 3056-3063. |
| 6 | Lefèvre S, Laugier C, Ibaez-Guzmàn J. Intention-aware risk estimation for general traffic situations, and application to intersection safety[J]. Hal Inria, 2013, 8379: 1-23. |
| 7 | Deo N, Rangesh A, Trivedi M M. How would surround vehicles move? a unified framework for maneuver classification and motion prediction[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(2): 129-140. |
| 8 | Lee D, Kwon Y P, Mcmains S. Convolution neural network-based lane change intention prediction of surrounding vehicles for ACC[C]∥IEEE 20th International Conference on Intelligent Transportation Systems, Yokohama, Japan, 2017: 1-6. |
| 9 | Khosroshahi A, Ohn-Bar E, Trivedi M M. Surround vehicles trajectory analysis with recurrent neural networks[C]∥IEEE International Conference on Intelligent Transportation Systems, Rio de Janeiro, Cluj-Napoca, Romania, 2016: 2267-2272. |
| 10 | Phillps D J, Wheeler T A, Kochenderfer M J. Generalizable intention prediction of human drivers at intersections [C]∥IEEE Intelligent Vehicles Symposium (IV), Redondo Beach, USA, 2017: 1665-1670. |
| 11 | Kim B, Kang C M, Kim J. Probabilistic vehicle trajectory prediction over occupancy grid map via recurrent neural network [C]∥IEEE 20th International Conference on Intelligent Transportation Systems, Yokohama, Japan, 2017: 399-404. |
| 12 | Lee N, Choi W, Vernaza P. DESIRE: distant future prediction in dynamic scenes with interacting agents[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 2165-2174. |
| 13 | Deo N, Trivedi M M. Convolutional social pooling for vehicle trajectory prediction[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, USA, 2018: 1549-1557. |
| 14 | Deo N, Trivedi M M. Multi-modal trajectory prediction of surrounding vehicles with maneuver based LSTMs[C]∥IEEE Intelligent Vehicles Symposium, Changshu, China, 2018: 1179-1184. |
| 15 | Zhang H, Wang Y, Liu J. A multi-modal states based vehicle descriptor and dilated convolutional social pooling for vehicle trajectory prediction[J]. SAE Technical Papers, arXiv: . |
| 16 | Alexiadis V, Colyar J, Halkias J. The next generation simulation program[J]. ITE Journal, 2004, 74(8): 22-26. |
| 17 | Thiemann C, Treiber M, Kesting A. Estimating acceleration and lane-changing dynamics based on NGSIM trajectory data[J]. Transportation Research Record Journal of the Transportation Research Board, 2008(2088): 90-101. |
| [1] | 陈磊,王杨,董志圣,宋亚奇. 一种基于转向意图的车辆敏捷性控制策略[J]. 吉林大学学报(工学版), 2023, 53(5): 1257-1263. |
| [2] | 陈鑫,张冠宸,赵康明,王佳宁,杨立飞,司徒德蓉. 搭接焊缝对铝合金焊接结构轻量化设计的影响[J]. 吉林大学学报(工学版), 2023, 53(5): 1282-1288. |
| [3] | 张勇,毛凤朝,刘水长,王青妤,潘神功,曾广胜. 基于Laplacian算法的汽车外流场畸变网格优化[J]. 吉林大学学报(工学版), 2023, 53(5): 1289-1296. |
| [4] | 汪少华,储堃,施德华,殷春芳,李春. 基于有限时间扩张状态观测的HEV鲁棒复合协调控制[J]. 吉林大学学报(工学版), 2023, 53(5): 1272-1281. |
| [5] | 于贵申,陈鑫,武子涛,陈轶雄,张冠宸. AA6061⁃T6铝薄板无针搅拌摩擦点焊接头结构及性能分析[J]. 吉林大学学报(工学版), 2023, 53(5): 1338-1344. |
| [6] | 杨红波,史文库,陈志勇,郭年程,赵燕燕. 基于NSGA⁃II的斜齿轮宏观参数多目标优化[J]. 吉林大学学报(工学版), 2023, 53(4): 1007-1018. |
| [7] | 赵睿,李云,胡宏宇,高镇海. 基于V2I通信的交叉口车辆碰撞预警方法[J]. 吉林大学学报(工学版), 2023, 53(4): 1019-1029. |
| [8] | 陈小波,陈玲. 定位噪声统计特性未知的变分贝叶斯协同目标跟踪[J]. 吉林大学学报(工学版), 2023, 53(4): 1030-1039. |
| [9] | 吕卫,韩镓泽,褚晶辉,井佩光. 基于多模态自注意力网络的视频记忆度预测[J]. 吉林大学学报(工学版), 2023, 53(4): 1211-1219. |
| [10] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [11] | 刘嫣然,孟庆瑜,郭洪艳,李嘉霖. 图注意力模式下融合高精地图的周车轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 792-801. |
| [12] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [13] | 张建,刘金波,高原,刘梦可,高振海,杨彬. 基于多模交互的车载传感器定位算法[J]. 吉林大学学报(工学版), 2023, 53(3): 772-780. |
| [14] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [15] | 田彦涛,许富强,王凯歌,郝子绪. 考虑周车信息的自车期望轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 674-681. |
|
||