吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (3): 943-952.doi: 10.13229/j.cnki.jdxbgxb20180081
咀嚼机器人颞下颌关节仿生设计及试验测试
温海营1( ),任翔2(),徐卫良3,丛明4,秦文龙4,胡书海2
),任翔2(),徐卫良3,丛明4,秦文龙4,胡书海2
- 1. 大连理工大学 控制科学与工程学院,辽宁 大连 116024
2. 大连医科大学 口腔医学院,辽宁 大连 116044
3. 新西兰奥克兰大学 机械工程系,奥克兰 1142
4. 大连理工大学 机械工程学院,辽宁 大连 116024
Bionic design and experimental test of temporomandibular joint for masticatory robot
Hai⁃ying WEN1(),Xiang REN2(),Wei⁃liang XU3,Ming CONG4,Wen⁃long QIN4,Shu⁃hai HU2
- 1. School of Control Science and Engineering, Dalian University of Technology, Dalian 116024, China
2. College of Stomatology, Dalian Medical University, Dalian 116044, China
3. Department of Mechanical Engineering, The University of Auckland, Auckland 1142, New Zealand
4. School of Mechanical Engineering, Dalian University of Technology, Dalian 116024, China
摘要:
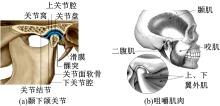
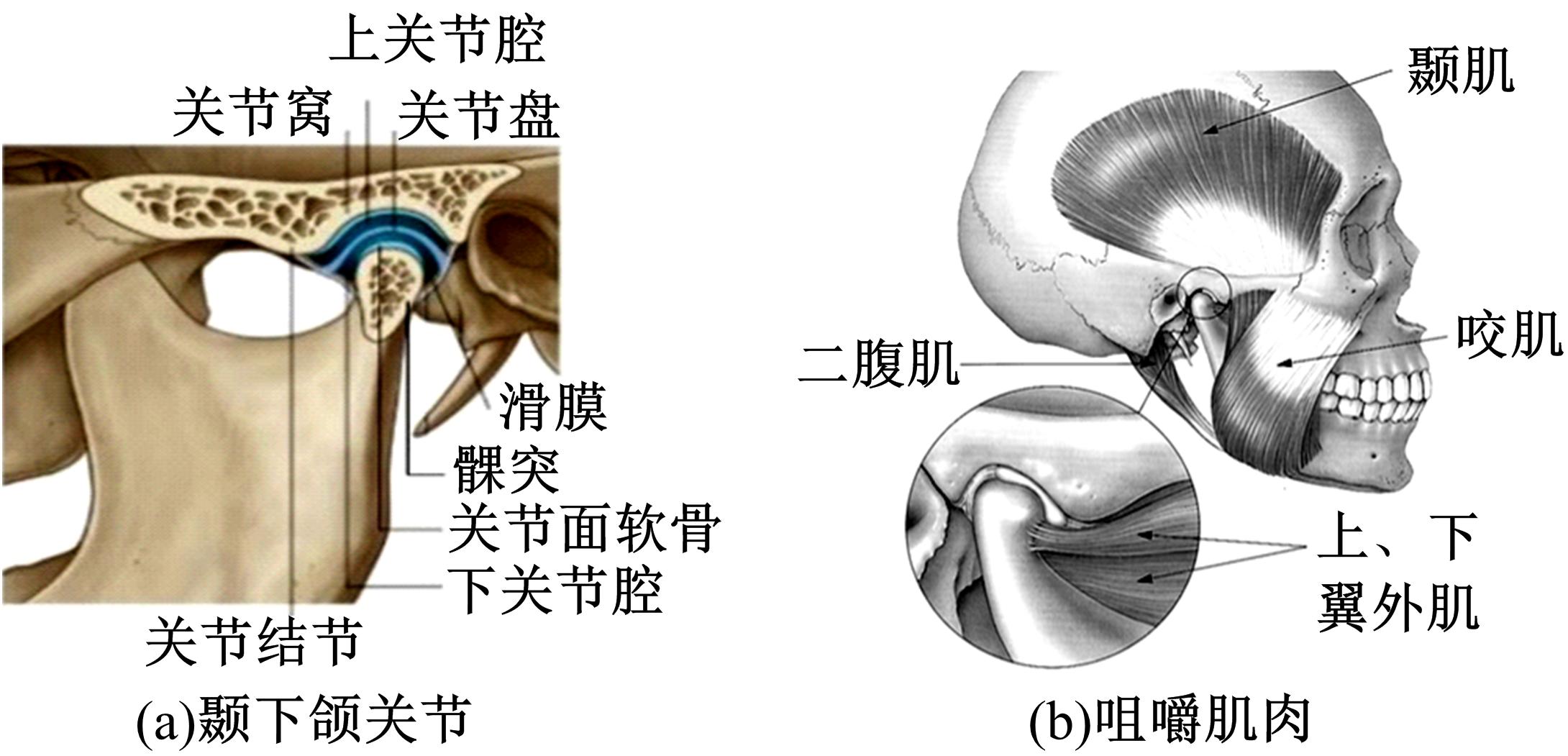
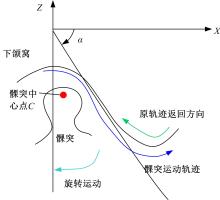
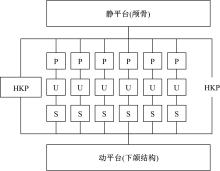
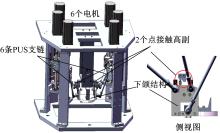
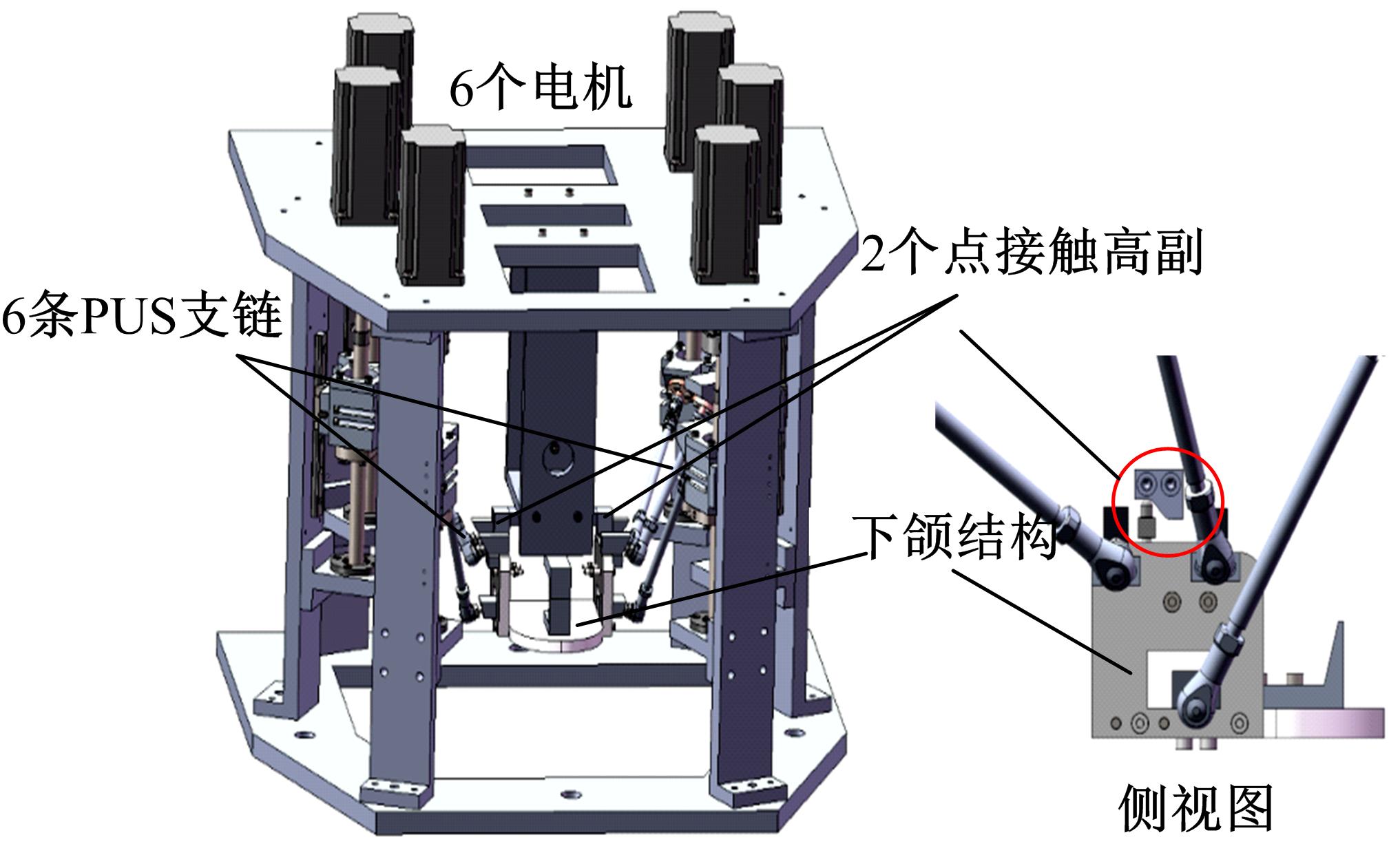
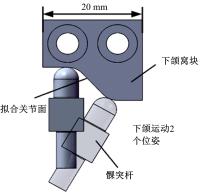
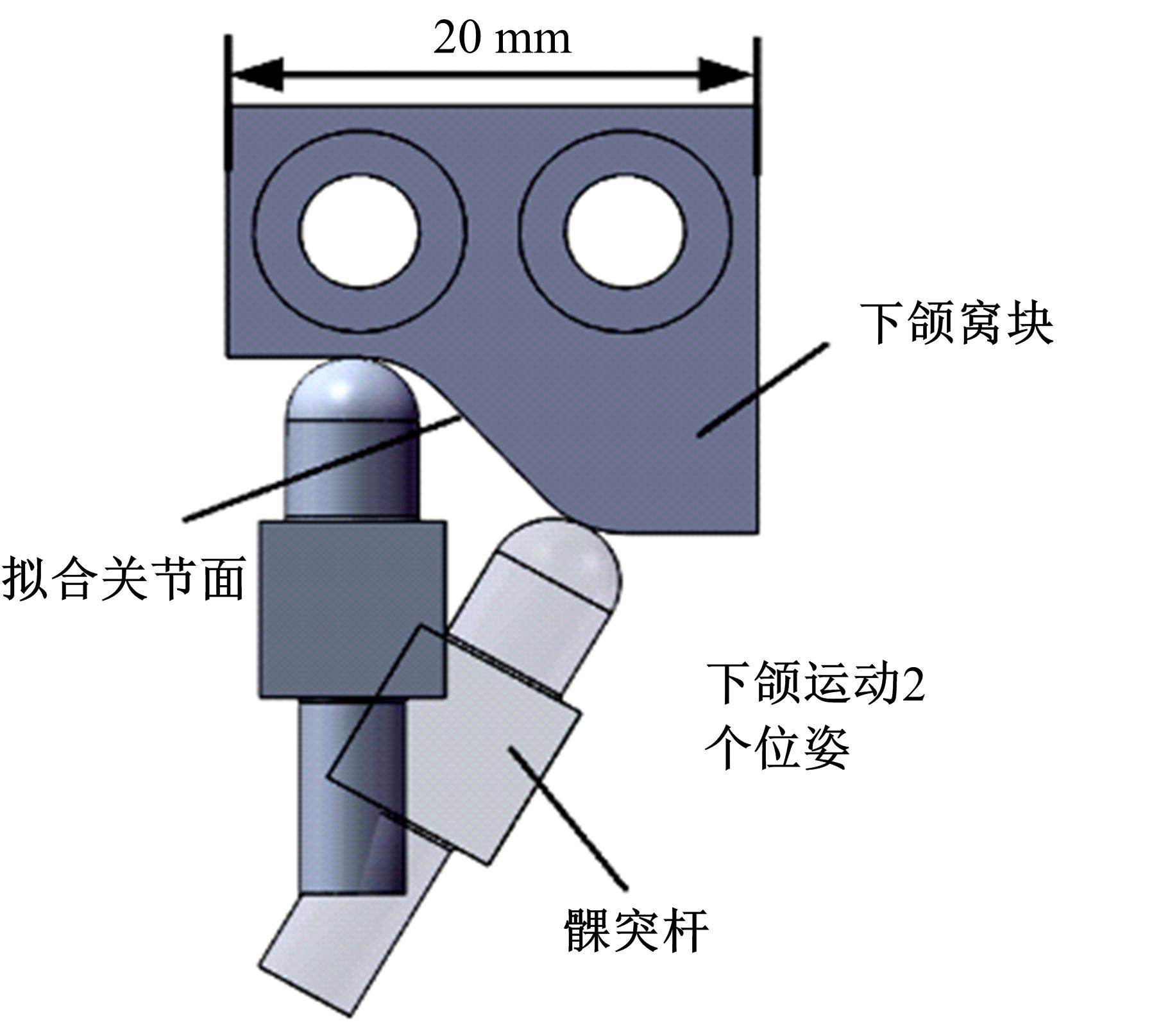
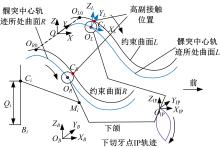
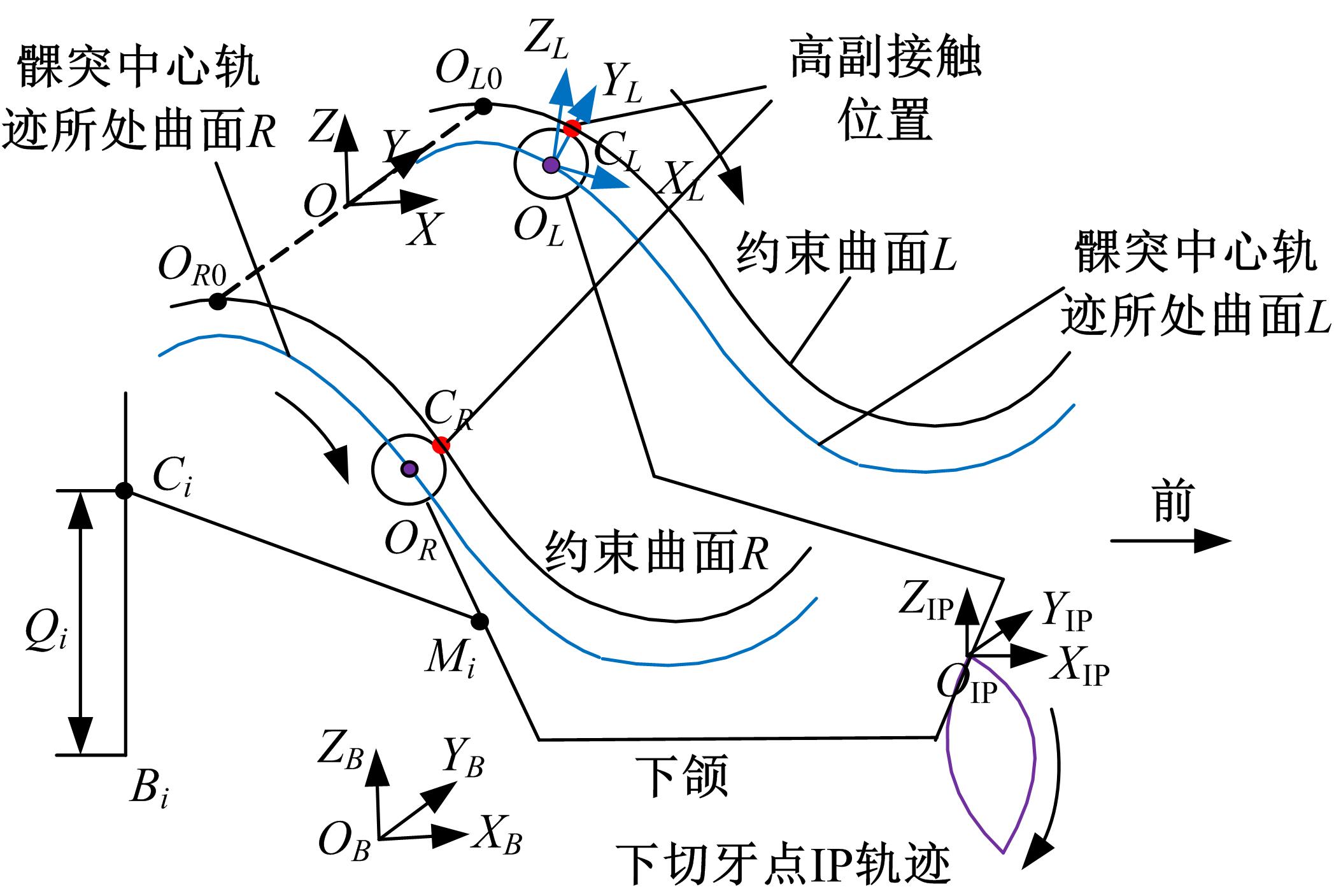
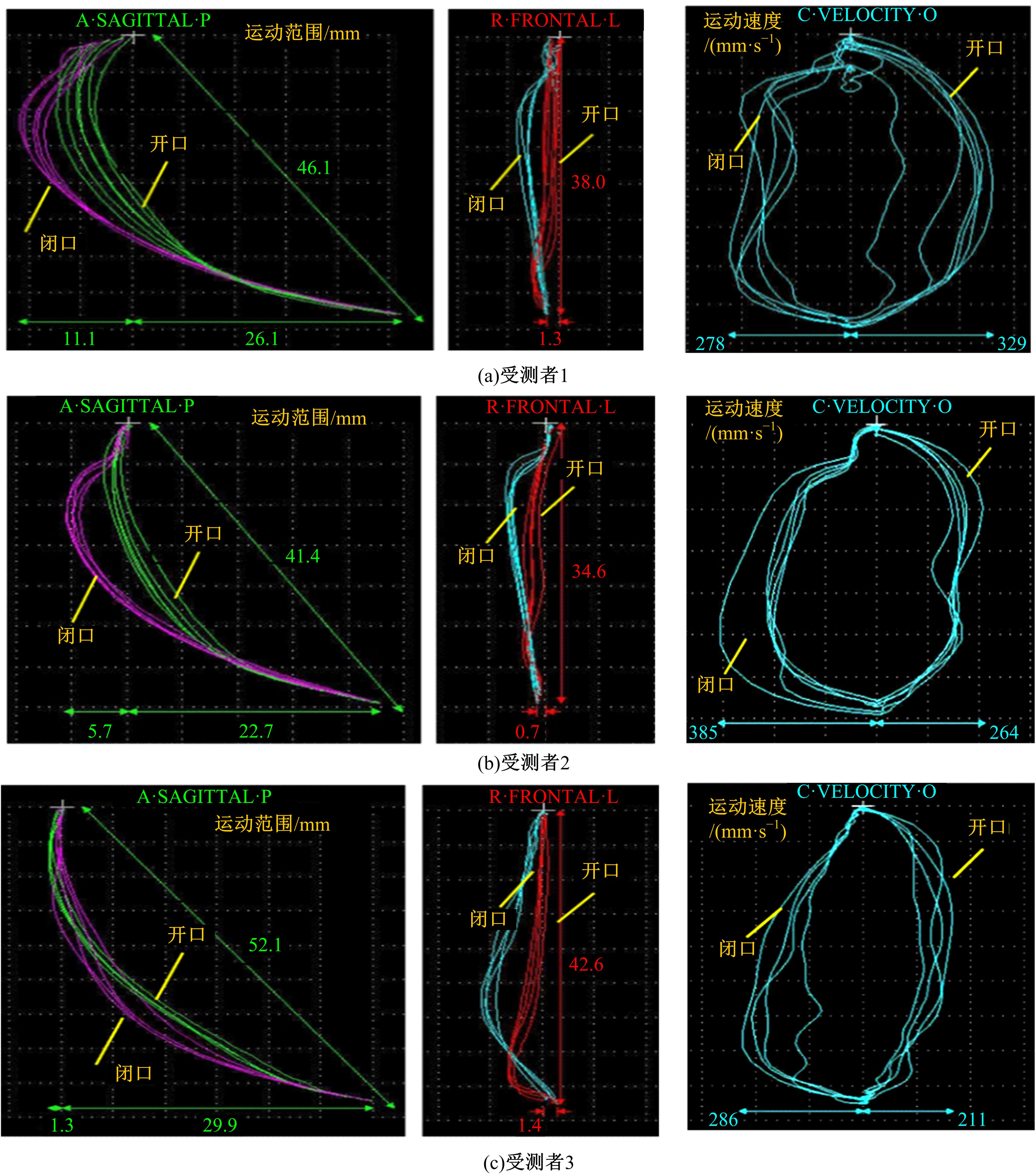
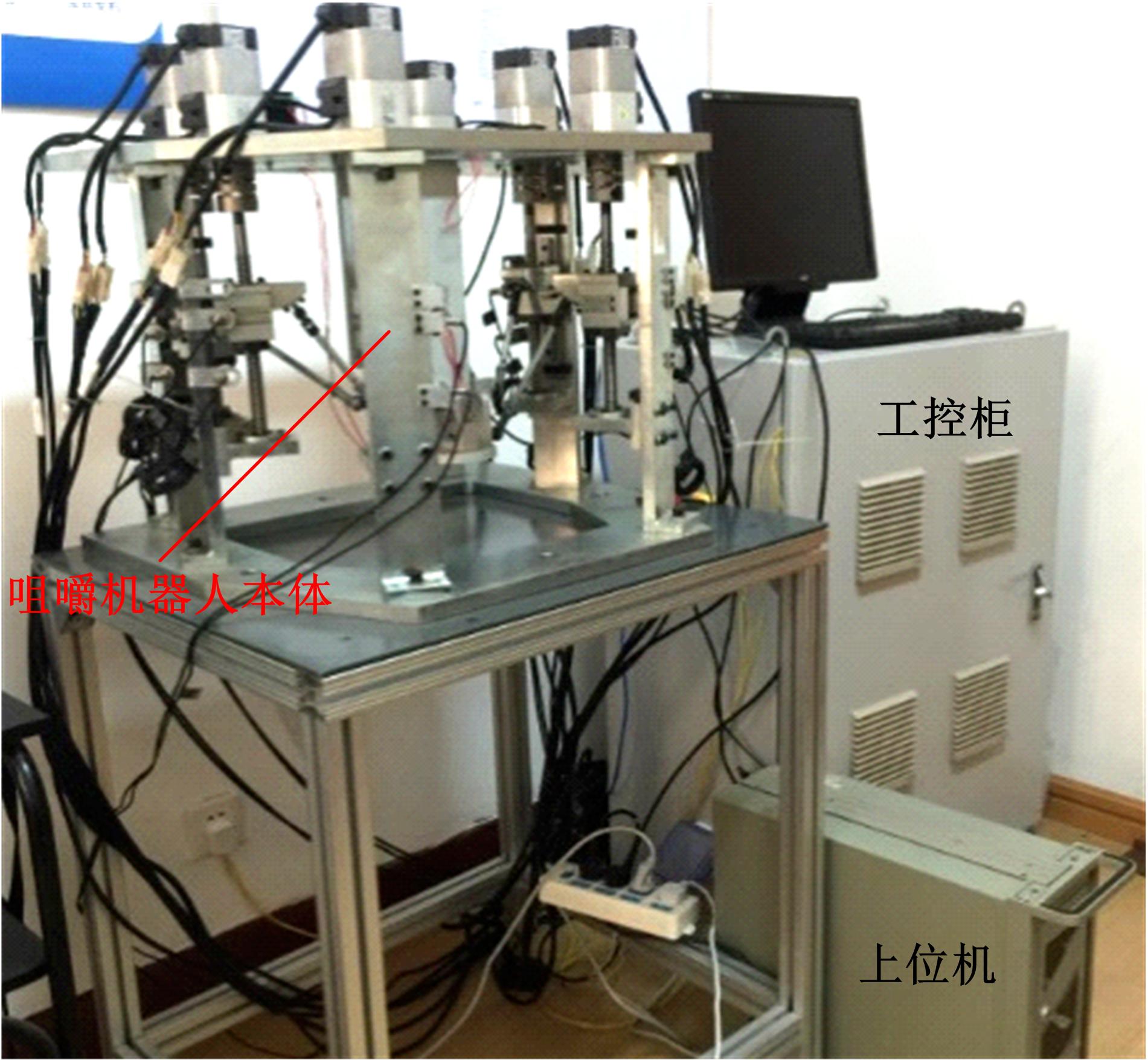
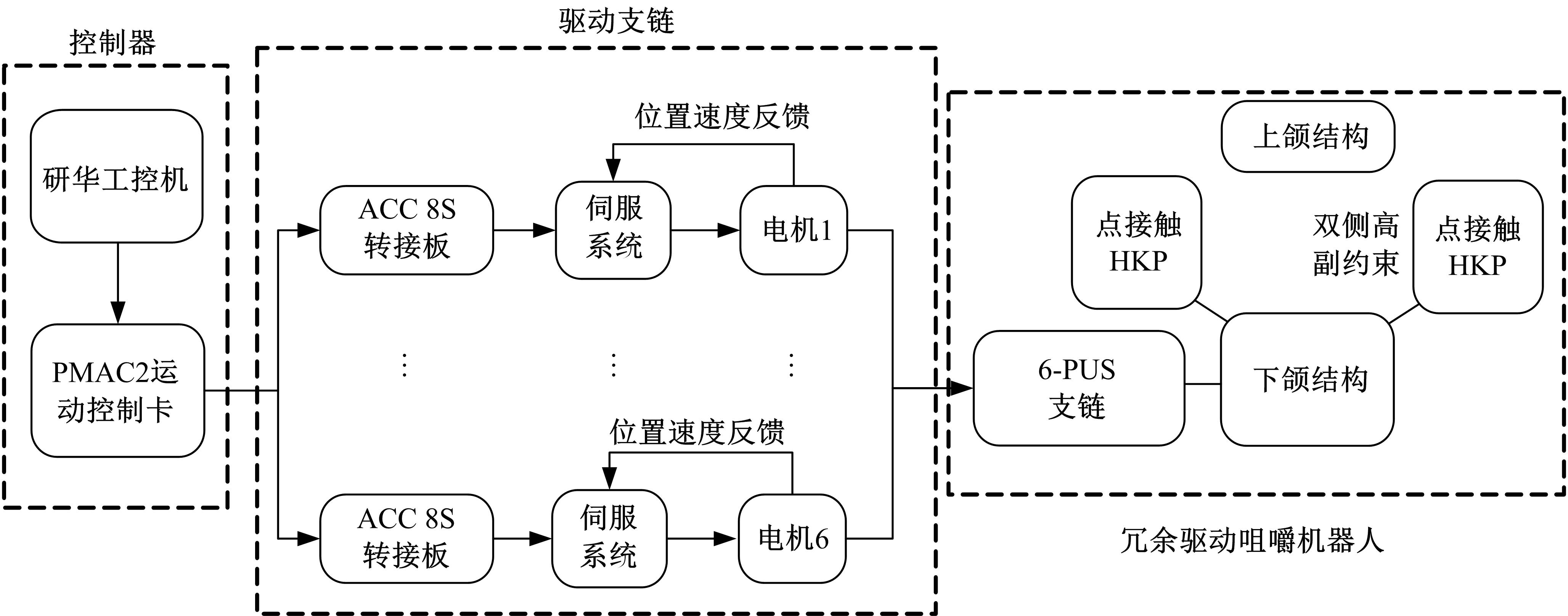
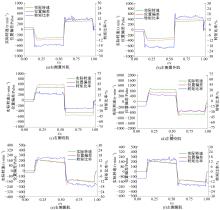
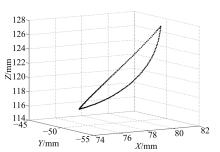
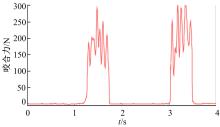
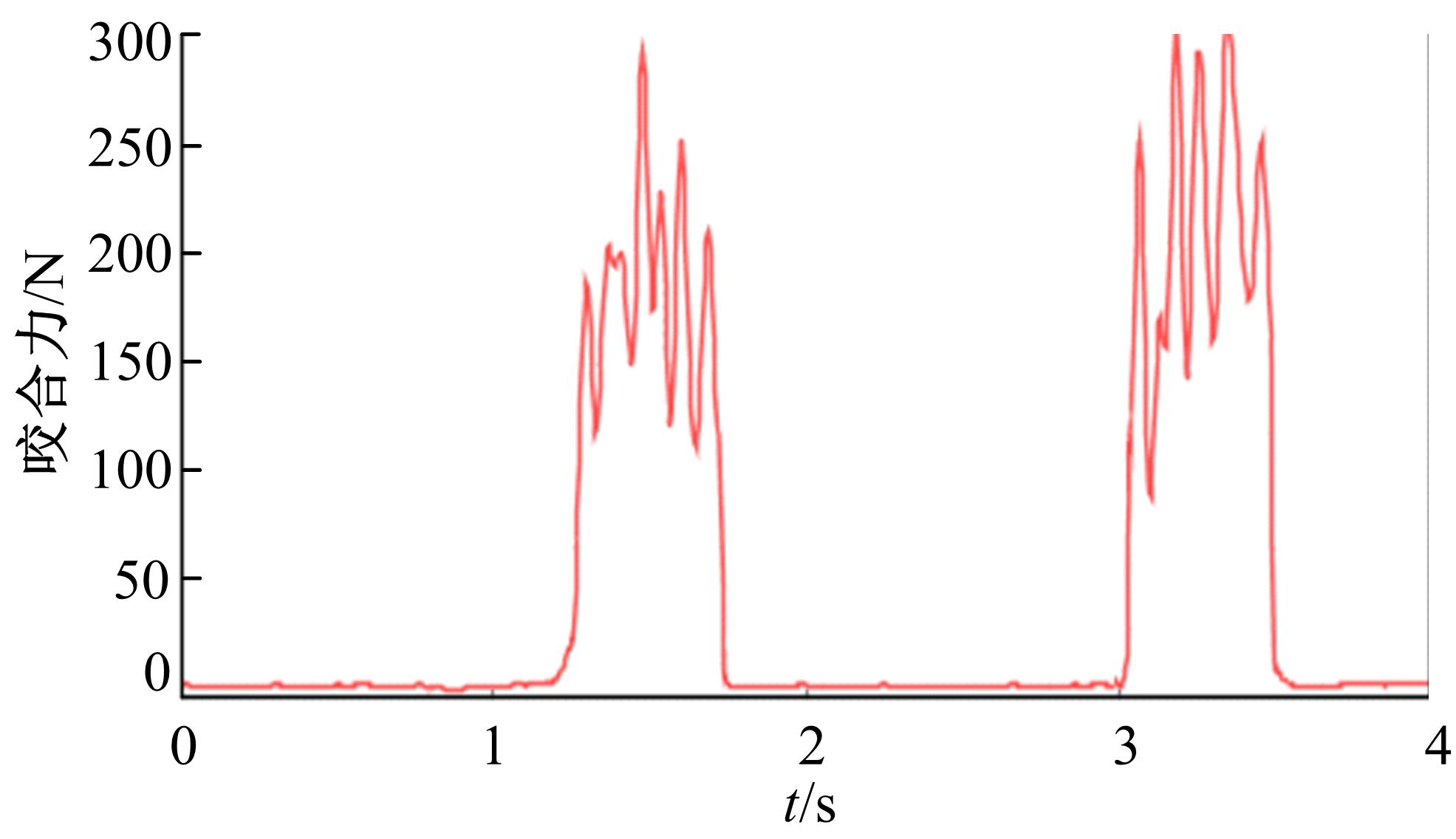
为再现口颌系统的下颌运动,并提高咀嚼机器人的仿生度,引入了一种含有点接触高副的冗余驱动并联咀嚼机器人。采用医学测量的方法进行颞下颌关节结构的分析,完成咀嚼机器人点接触高副结构的仿生设计。基于双侧联动高副的约束关系,完成了颞下颌关节运动关系分析及运动学建模。对多位受测者下颌运动进行测量,获得人类开闭口运动的轨迹、最大速度和频率等参数。对咀嚼机器人开闭口运动和下颌受力进行了试验测试,验证了咀嚼机器人性能可以满足义齿磨损疲劳性能测试所需要的下颌运动和咀嚼力。
中图分类号:
- TP29












| 1 | 谭民,王硕. 机器人技术研究进展[J]. 自动化学报,2013,39(7):963⁃972. |
| TanMin, WangShuo. Research progress on robotics[J]. Acta Automatica Sinica,2013,39(7):963⁃972. | |
| 2 | 祁若龙,张伟,王铁军,等. 仿人头颈部机器人跟踪运动控制[J]. 吉林大学学报:工学版,2016,46(5):1595⁃1601. |
| QiRuo⁃long, ZhangWei, WangTie⁃jun, et al. Tracking motion control method of humanoid head and neck robot[J]. Journal of Jilin University(Engineering and Technology Edition),2016,46(5):1595⁃1601. | |
| 3 | 曹福成,邢笑雪,李元春,等. 下肢康复机器人轨迹自适应滑模阻抗控制[J]. 吉林大学学报:工学版,2016,46(5):1602⁃1608. |
| CaoFu⁃cheng, XingXiao⁃xue, LiYuan⁃chun, et al. Adaptive trajectory sliding mode impedance control for lower limb rehabilitation robot[J]. Journal of Jilin University(Engineering and Technology Edition),2016,46(5):1602⁃1608. | |
| 4 | 刘少刚,郭云龙,贾鹤鸣. 基于直线特征提取匹配搜救机器人的同步定位与地图构建[J]. 吉林大学学报:工学版,2013,43(4):1035⁃1044. |
| LiuShao⁃gang, GuoYun⁃long, JiaHe⁃ming. Rescue robot simultaneous localization and mapping based on extraction and matching of line features[J]. Journal of Jilin University(Engineering and Technology Edition),2013,43(4):1035⁃1044. | |
| 5 | XuW, BronlundJ E. Mastication Robots[M]. Berlin:Springer,2010. |
| 6 | WenH Y, XuW L, CongM. Kinematic model and analysis of an actuation redundant parallel robot with higher kinematic pairs for jaw movement[J]. IEEE Transactions on Industrial Electronics,2015,62(3):1590⁃1598. |
| 7 | WangL, SadlerJ, BreedingL, et al. An in vitro study of implant⁃tooth⁃supported connections using a robot test system[J]. Journal of Biomechanical Engineering,1999,121(3):290⁃297. |
| 8 | 温海营,丛明,王贵飞,等. 冗余驱动仿下颌运动机器人工作空间分析及试验验证[J]. 机器人,2015,37(3):286⁃297. |
| WenHai⁃ying,CongMing,WangGui⁃fei, et al. Workspace analysis and experimental verification of a redundantly actuated jaw movement robot[J]. Robot,2015,37(3):286⁃297. | |
| 9 | CelebiN, RohnerE C, GatenoJ, et al. Development of a mandibular motion simulator for total joint replacement[J]. Journal of Oral and Maxillofacial Surgery,2011,69(1):66⁃79. |
| 10 | WangG, CongM, XuW, et al. A biomimetic chewing robot of redundantly actuated parallel mechanism[J]. Industrial Robot: An International Journal,2015,42(2):103⁃109. |
| 11 | WenH Y, CongM, WangG F. Experimental verification of workspace and mouth⁃opening movement of a redundantly actuated humanoid chewing robot[J]. Industrial Robot: An International Journal,2015,42(5):406⁃415. |
| 12 | XuW L, LewisD, BronlundJ E, et al. Mechanism, design and motion control of a linkage chewing device for food evaluation[J]. Mechanism and Machine Theory,2008,43(3):376⁃389. |
| 13 | XuW L, PapJ S, BronlundJ. Design of a biologically inspired parallel robot for foods chewing[J]. IEEE Transactions on Industrial Electronics,2008,55(2):832⁃841. |
| 14 | 孙钟雷,孙永海,万鹏,等. 仿生咀嚼装置设计与试验[J]. 农业机械学报,2011,42(8):214⁃218. |
| SunZhong⁃lei, SunYong⁃hai, WanPeng, et al. Design and experiment on bionic chewing equipment[J]. Transactions of the Chinese Society for Agricultural Machinery,2011,42(8):214⁃218. | |
| 15 | YuJ H, LiX F, ZhouH, et al. Research on workspace of masticatory bionic robot based on the 3/3⁃RRRS parallel manipulator[J]. Advanced Materials Research,2013,655:1092⁃1095. |
| 16 | 王倩竹. 咀嚼模拟机器人设计与分析[D]. 长春:吉林大学生物与农业工程学院,2014. |
| WangQian⁃zhu. Design and analysis of a food mastication robot[D]. Changchun: College of Biological and Agricultural Engineering,Jilin University,2014. | |
| 17 | AlemzadehK, RaabeD. Prototyping artificial jaws for the Bristol Dento⁃Munch Robo⁃Simulator ‘a parallel robot to test dental components and materials’[C]∥Proceedings of 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France,2007:1453⁃1456. |
| 18 | OkinoA, InoueT, TakanobuH, et al. A clinical jaw movement training robot for lateral movement training. In Robotics and Automation[C]∥Proceedings of 20th IEEE International Conference on Robotics and Automation, Taipei, China, 2003:244⁃249. |
| 19 | TakanobuH, TakanishiA, OzawaD, et al. Integrated dental robot system for mouth opening and closing training[C]∥Proceedings of 19th IEEE International Conference on Robotics and Automation, Washington, USA, 2002:1428⁃1433. |
| 20 | BoweyC, BurgessD. Robotic temporomandibular joint[R]. Australia:University of Adelaide,2005. |
| 21 | HayashiT, TanakaS, NakajimaS, et al. Control mechanism of an autonomous jaw⁃movement simulator, JSN/1C, during open⁃close movement[C]∥Proceedings of the 18th Annual International Conference of the IEEE Engineering in Medicine and Biology Society,Amsterdam,Holland, 1996:613⁃614. |
| 22 | AndersonD J. Measurements of stress in mastication[J]. Journal of Dental Research, 1956,41:175⁃189. |
| 23 | GibbsC H, MahanP E, LundeenH E. Occlusal forces during chewing⁃influences of biting strength and food consistency[J]. Journal of Prosthetic Dentistry,1981,46:561⁃567. |
| [1] | 于树友,谭雷,王伍洋,陈虹. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报(工学版), 2019, 49(3): 934-942. |
| [2] | 顾万里,王萍,胡云峰,蔡硕,陈虹. 具有H∞性能的轮式移动机器人非线性控制器设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1811-1819. |
| [3] | 李战东,陶建国,罗阳,孙浩,丁亮,邓宗全. 核电水池推力附着机器人系统设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1820-1826. |
| [4] | 赵爽,沈继红,张刘,赵晗,陈柯帆. 微细电火花加工表面粗糙度快速高斯评定[J]. 吉林大学学报(工学版), 2018, 48(6): 1838-1843. |
| [5] | 王德军, 魏薇郦, 鲍亚新. 考虑侧风干扰的电子稳定控制系统执行器故障诊断[J]. 吉林大学学报(工学版), 2018, 48(5): 1548-1555. |
| [6] | 闫冬梅, 钟辉, 任丽莉, 王若琳, 李红梅. 具有区间时变时滞的线性系统稳定性分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1556-1562. |
| [7] | 张茹斌, 占礼葵, 彭伟, 孙少明, 刘骏富, 任雷. 心肺功能评估训练系统的恒功率控制[J]. 吉林大学学报(工学版), 2018, 48(4): 1184-1190. |
| [8] | 董惠娟, 于震, 樊继壮. 基于激光测振仪的非轴对称超声驻波声场的识别[J]. 吉林大学学报(工学版), 2018, 48(4): 1191-1198. |
| [9] | 张士涛, 张葆, 李贤涛, 王正玺, 田大鹏. 基于零相差轨迹控制方法提升快速反射镜性能[J]. 吉林大学学报(工学版), 2018, 48(3): 853-858. |
| [10] | 田彦涛, 张宇, 王晓玉, 陈华. 基于平方根无迹卡尔曼滤波算法的电动汽车质心侧偏角估计[J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
| [11] | 王林, 王洪光, 宋屹峰, 潘新安, 张宏志. 输电线路悬垂绝缘子清扫机器人行为规划[J]. 吉林大学学报(工学版), 2018, 48(2): 518-525. |
| [12] | 胡云峰, 王长勇, 于树友, 孙鹏远, 陈虹. 缸内直喷汽油机共轨系统结构参数优化[J]. 吉林大学学报(工学版), 2018, 48(1): 236-244. |
| [13] | 朱枫, 张葆, 李贤涛, 王正玺, 张士涛. 基于强跟踪卡尔曼滤波的陀螺信号处理[J]. 吉林大学学报(工学版), 2017, 47(6): 1868-1875. |
| [14] | 晋超琼, 张葆, 李贤涛, 申帅, 朱枫. 基于扰动观测器的光电稳定平台摩擦补偿策略[J]. 吉林大学学报(工学版), 2017, 47(6): 1876-1885. |
| [15] | 冯建鑫. 具有测量时滞的不确定系统的递推鲁棒滤波[J]. 吉林大学学报(工学版), 2017, 47(5): 1561-1567. |
|
||