吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (6): 1858-1864.doi: 10.13229/j.cnki.jdxbgxb20180928
占用车行道的路内停车泊位设置条件
程国柱1,冯思鹤1,冯天军2( )
)
- 1. 东北林业大学 交通学院,哈尔滨 150040
2. 吉林建筑大学 交通科学与工程学院,长春 130118
Setting condition of on⁃street parking space occupied vehicle lane
Guo-zhu CHENG1,Si-he FENG1,Tian-jun FENG2()
- 1. School of Traffic and Transportation, Northeast Forestry University, Harbin 150040, China
2. School of Transportation Science and Engineering, Jilin Jianzhu University, Changchun 130118, China
摘要:
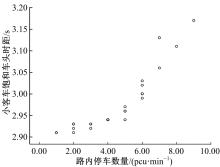
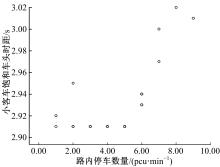
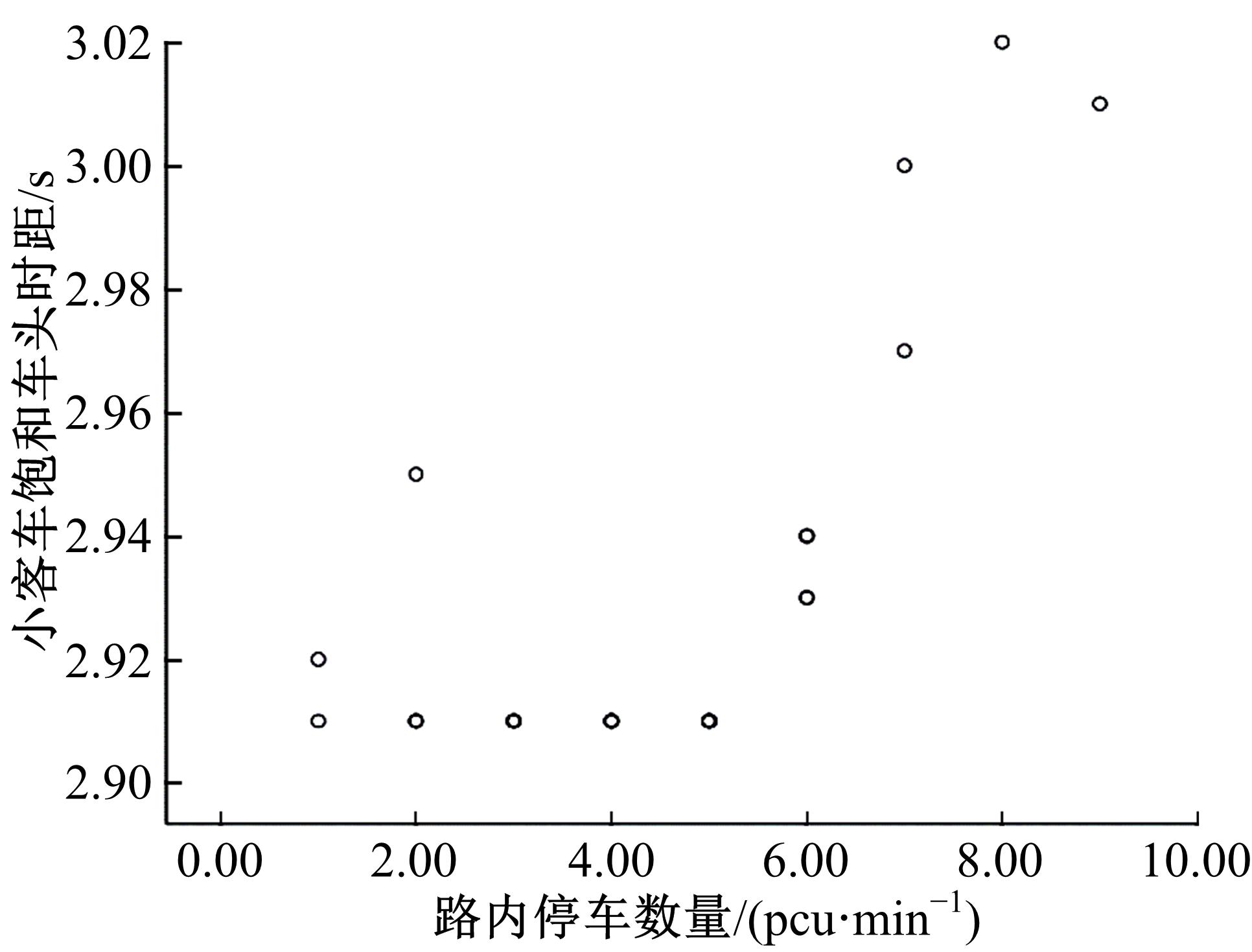
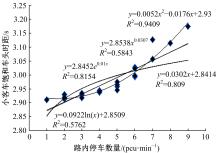
为了给占用车行道的路内停车泊位设置提供参考依据,通过开展路内停车干扰条件下城市道路路段交通流参数调查,分析给出了小客车饱和车头时距随路内停车数量变化的规律,采用SPSS统计分析软件分别构建了间隔车道、邻近车道的饱和车头时距与小客车在路内停车数量的关系模型。基于所建理论模型,给出了设置路内停车泊位的邻近车道和间隔车道机动车交通量阈值的建议,并进行了实例验证。研究结果表明:随着路内停车数量的增加,邻近车道和间隔车道的小客车饱和车头时距均增加,且满足二次函数关系;路内停车数越多且设计速度越高,该道路实际通行能力的路内停车数量的修正系数越小,说明其越不宜设置路内停车泊位;在路内停车数量相同的情况下,间隔车道的修正系数若大于邻近车道,说明路内停车对该路间隔车道的交通运行影响要小于邻近车道。
中图分类号:
- U491




|
| [1] | 别一鸣,姜凯,汤茹茹,王琳虹,熊昕宇. 考虑方案过渡影响的单点交通控制时段划分方法[J]. 吉林大学学报(工学版), 2019, 49(6): 1844-1851. |
| [2] | 谷远利, 张源, 芮小平, 陆文琦, 李萌, 王硕. 基于免疫算法优化LSSVM的短时交通流预测[J]. 吉林大学学报(工学版), 2019, 49(6): 1852-1857. |
| [3] | 别一鸣,汤茹茹,王运豪,文斌,冯天军,王琳虹. 信号交叉口进口车道饱和流率估计方法[J]. 吉林大学学报(工学版), 2019, 49(5): 1459-1464. |
| [4] | 梁泉,翁剑成,周伟,荣建. 基于关联规则的公共交通通勤稳定性人群辨识[J]. 吉林大学学报(工学版), 2019, 49(5): 1484-1491. |
| [5] | 龙海波,杨家其,赵学彧. 基于转运延误风险的多方式协同货运载运工具配置优化[J]. 吉林大学学报(工学版), 2019, 49(5): 1492-1499. |
| [6] | 曲昭伟,潘昭天,陈永恒,陶鹏飞,孙迪. 基于最优速度模型的改进安全距离跟驰模型[J]. 吉林大学学报(工学版), 2019, 49(4): 1092-1099. |
| [7] | 吴文静,陈润超,贾洪飞,罗清玉,孙迪. 车路协同环境下路段掉头区域车辆协同控制[J]. 吉林大学学报(工学版), 2019, 49(4): 1100-1106. |
| [8] | 江亮,贺宜. 电动两轮车风险驾驶行为及事故影响因素分析[J]. 吉林大学学报(工学版), 2019, 49(4): 1107-1113. |
| [9] | 白乔文,曲昭伟,陈永恒,熊帅,陶楚青. 非严格优先权下无左转专用相位直行车辆轨迹模型建立[J]. 吉林大学学报(工学版), 2019, 49(3): 673-679. |
| [10] | 李志慧,钟涛,赵永华,胡永利,李海涛,赵景伟. 面向车辆自主驾驶的行人跟踪算法[J]. 吉林大学学报(工学版), 2019, 49(3): 680-687. |
| [11] | 曹宁博,赵利英,曲昭伟,陈永恒,白乔文,邓晓磊. 考虑双向行人跟随行为的社会力模型[J]. 吉林大学学报(工学版), 2019, 49(3): 688-694. |
| [12] | 罗小芹,王殿海,金盛. 面向混合交通的感应式交通信号控制方法[J]. 吉林大学学报(工学版), 2019, 49(3): 695-704. |
| [13] | 陈磊,王江锋,谷远利,闫学东. 基于思维进化优化的多源交通数据融合算法[J]. 吉林大学学报(工学版), 2019, 49(3): 705-713. |
| [14] | 凃强,程琳,林芬,孙超. 考虑出行者风险态度的最优路径搜索[J]. 吉林大学学报(工学版), 2019, 49(3): 720-726. |
| [15] | 尹超英,邵春福,王晓全. 考虑停车可用性的建成环境对小汽车通勤出行的影响[J]. 吉林大学学报(工学版), 2019, 49(3): 714-719. |
|