Journal of Jilin University(Engineering and Technology Edition) ›› 2020, Vol. 50 ›› Issue (1): 53-65.doi: 10.13229/j.cnki.jdxbgxb20181272
Previous Articles Next Articles
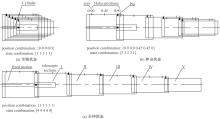
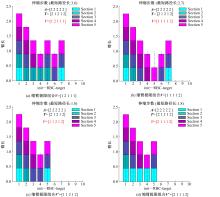
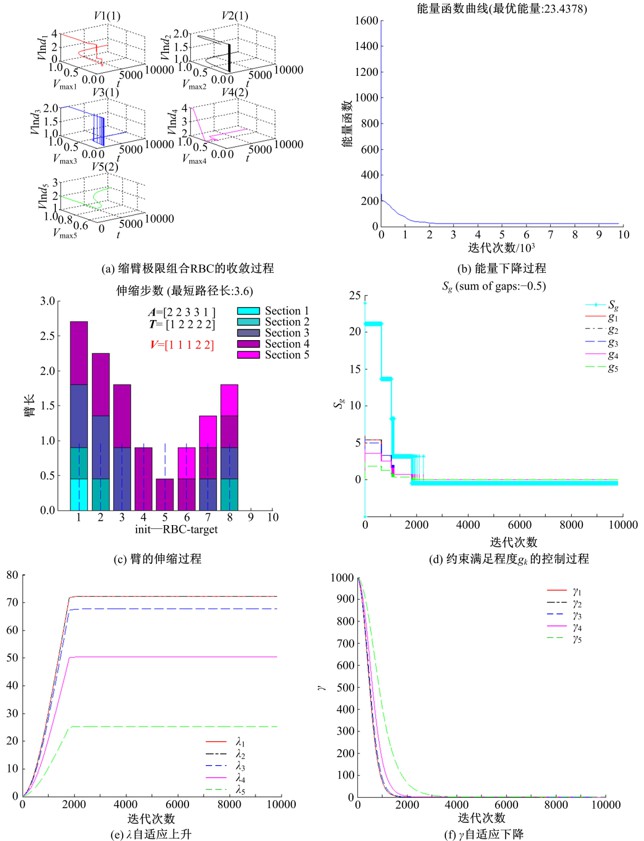
Telescoping path optimization of a single-cylinder pin⁃type multi⁃section boom based on Hopfield neural network
Yan MAO( ),Kai CHENG()
),Kai CHENG()
- College of Mechanical and Aerospace Engineering, Jilin University, Changchun 130022, China
CLC Number:
- TH213



| 1 | Zhan Chun-xin , Liu Quan , Guo Ji-mei , et al . Single-cylinder pin-type telescopic boom track optimized control method and control system[P]. WO/ 2011/038633, 2011-07-04. |
| 2 | 毛艳, 成凯 . 一种高效的单缸插销式多级顺序伸缩路径优化方法[P]. 中国:CN 106744389B, 2018-07-17. |
| 3 | 毛艳, 成凯 . 单缸插销式多级顺序伸缩路径优化方法 [P].中国:CN 106744386B, 2018-04-10. |
| 4 | 郑飞 . 动态规划法在服装运输车辆路径优化中的应用 研究[J]. 物流科技, 2016, 39(2): 78-82. |
| Zheng Fei . Research on the application of dynamic programming method in the optimization of apparel vehicle routing[J]. Logistics Sci-Tech, 2016, 39(2): 78-82. | |
| 5 | Wen U P , Lan K M , Shih H S . A review of hopfield neural networks for solving mathematical programming problems[J]. European Journal of Operational Research, 2009, 198(3): 675-687. |
| 6 | Hopfield J J . Neural networks and physical systems with emergent collective computational abilities[J]. Proceedings of the National Academy of Sciences, 1982, 79(8): 2554-2558. |
| 7 | Hopfield J J , Tank D W . ‘Neural’ computation of decisions in optimization problems[J]. Biological Cybernetics, 1985, 52(3): 141-152. |
| 8 | Wilson G V , Pawley G S . On the stability of the travelling salesman problem algorithm of Hopfield and tank[J]. Biological Cybernetics, 1988, 58(1): 63-70. |
| 9 | Kennedy M P , Chua L O . Neural networks for nonlinear programming[J]. IEEE Transactions on Circuits & Systems, 1988, 35(5): 554-562. |
| 10 | Rodriguez-Vazquez A , Rueda A , Huertas J L , et al . Switched-capacitor neural networks for linear programming[J]. Electronics Letters, 2002, 24(8): 496-498. |
| 11 | Brandt R D , Yao W , Laub A J , et al . Alternative networks for solving the traveling salesman problem and the list-matching problem[C]∥International Conference on Neural Networks, San Diego, CA, USA, 1988: 333-340. |
| 12 | Protzel P W , Palumbo D L , Arras M K . Performance and fault-tolerance of neural networks for optimization[J]. IEEE Transactions on Neural Networks, 1993, 4(4): 600-614. |
| 13 | Shirazi B , Yih S . Critical analysis of applying hopfield neural net model to optimization problems[C]∥IEEE International Conference on Systems, Man and Cybernetics, Cambridge,MA,USA, 1989: 210-215. |
| 14 | Aiyer S V B , Niranjan M , Fallside F . A theoretical investigation into the performance of the Hopfield model[J]. IEEE Transactions on Neural Networks, 1990, 1(2): 204-215. |
| 15 | 孙守宇, 郑君里 . Hopfield 网络求解 TSP的一种改进 算法和理论证明[J]. 电子学报, 1995, 23(1): 73-78. |
| Sun Shou-yu , Zheng Jun-li . A modified algorithm and theoretical analysis for hopfield network solving TSP[J]. Acta Electronica Sinica, 1995, 23(1): 73-78. | |
| 16 | 张军英, 许进, 保铮 . 神经网络求解TSP问题的理论分析及其改进[J]. 西安电子科技大学学报, 1996, (增刊1): 88-98. |
| Zhang Jun-ying , Xu Jin , Bao Zheng . Theoretical analysis and improvement of the neural network to solve the TSP problem[J]. Journal of Xidian University, 1996(Sup.1): 88-98. | |
| 17 | Effati S , Jafarzadeh M . A new nonlinear neural network for solving a class of constrained parametric optimization problems[J]. Applied Mathematics & Computation, 2007, 186(1): 814-819. |
| 18 | Lemonge A C C , Barbosa H J C , Bernardino H S . Variants of an adaptive penalty scheme for steady-state genetic algorithms in engineering optimization[J]. Engineering Computations, 2015, 32(8): 2182-2215. |
| 19 | Schoenauer M , Michalewicz Z . Boundary operators for constrained optimization problems[C]∥Baeck T, ed. Proceedings of the 7th International Conference on Genetic Algorithms. San Mateo, CA: Morgan Kaufmann Publishers, 1997. 322-329. |
| 20 | Wang Y , Cai Z , Guo G , et al . Multiobjective optimization and hybrid evolutionary algorithm to solve constrained optimization problems[J]. IEEE Transactions on Systems, Man, and Cybernetics, 2007: 37(3): 560-575. |
| [1] | Fu-chun JIA,Xian-jie MENG,Yu-long LEI. Optimal design of two degrees of freedom dynamic vibration absorber based on multi-objective genetic algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 1969-1976. |
| [2] | Zhi-jiang XIE,Kun WANG,Yang-jun PI,Xiao-yong WU,Ying-wei GUO. Novel method for forward kinematics of 6⁃PSSparallel manipulator [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 1977-1985. |
| [3] | Chang-you MA, Hai-bo GAO, Liang DING, Hai-tao YU, Hong-jun XING, Zong-quan DENG. Mechanism design and docking strategy forend⁃effectors exchange of robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 2027-2037. |
| [4] | Jun-ye LI,Yang LIU,Hui LU,Wen-qing MENG,Zhao-jun YANG,Xin-ming ZHANG. Numerical analysis of single crystal Fe with abrasive grain micro-cutting based on molecular dynamics [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1567-1574. |
| [5] | En-guo CAO,Kun LIU,Shuo JI,Zhen-yuan SUN,Hong-wei XU,Xing-ji LUO. Mechanical structure design and optimization of weight-support STS rehabilitation training system [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1558-1566. |
| [6] | Cheng YANG,Yong⁃sheng ZHAO,Zhi⁃feng LIU,Li⁃gang CAI. Stiffness model of bolted joint based on multi⁃scale theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1212-1220. |
| [7] | Jia⁃xu WANG,Xiao⁃kang NI,Yan⁃feng HAN,Guo XIANG,Ke XIAO. Numerical model of mixed lubrication for microgroove bearing considering axial reciprocating motion [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 888-896. |
| [8] | Xing⁃ye WANG,Jin⁃qiu ZHANG,Guo⁃qiang LI,Zhi⁃zhao PENG. Influence of inertial mass on rack and pinion actuator′s damping characteristic [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 881-887. |
| [9] | Kun LIU,Shuo JI,Zhen⁃yuan SUN,Hong⁃wei XU,Yong LIU,Jing⁃xia ZHAO. Mechanical structure design and optimization of multifunctional auxiliary toilet wheelchair [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 872-880. |
| [10] | BI Qiu-shi,WANG Guo-qiang,HUANG Ting-ting,MAO Rui,LU Yan-peng. Tooth strength analysis of mineral sizer by coupling discrete element method and finite element method [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1770-1776. |
| [11] | ZHU Wei,WANG Chuan-wei,GU Kai-rong,SHEN Hui-ping,XU Ke,WANG Yuan. Stiffness and dynamics analysis of a new type of tensegrity parallel mechanism [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1777-1786. |
| [12] | LIU Jian-fang, WANG Ji-bo, LIU Guo-jun, LI Xin-bo, LIANG Shi-hai, YANG Zhi-gang. PMMA micromixer embedded with 3D channel based on piezoelectric actuation [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1500-1507. |
| [13] | XIE Chuan-liu, TANG Fang-ping, SUN Dan-dan, ZHANG Wen-peng, XIA Ye, DUAN Xiao-hui. Model experimental analysis of pressure pulsation in vertical mixed-flow pump system [J]. 吉林大学学报(工学版), 2018, 48(4): 1114-1123. |
| [14] | WANG Tao, SAN Xiao-gang, GAO Shi-jie, WANG Hui-xian, WANG Jing, NI Ying-xue. Dynamic characteristics of vertical shaft system of photoelectric turntable [J]. 吉林大学学报(工学版), 2018, 48(4): 1099-1105. |
| [15] | HE Ji-lin, CHEN Yi-long, WU Kang, ZHAO Yu-ming, WANG Zhi-jie, CHEN Zhi-wei. Energy flow analysis of crane hoisting system and experiment of potential energy recovery system [J]. 吉林大学学报(工学版), 2018, 48(4): 1106-1113. |
|
||