Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (10): 3151-3161.doi: 10.13229/j.cnki.jdxbgxb.20231335
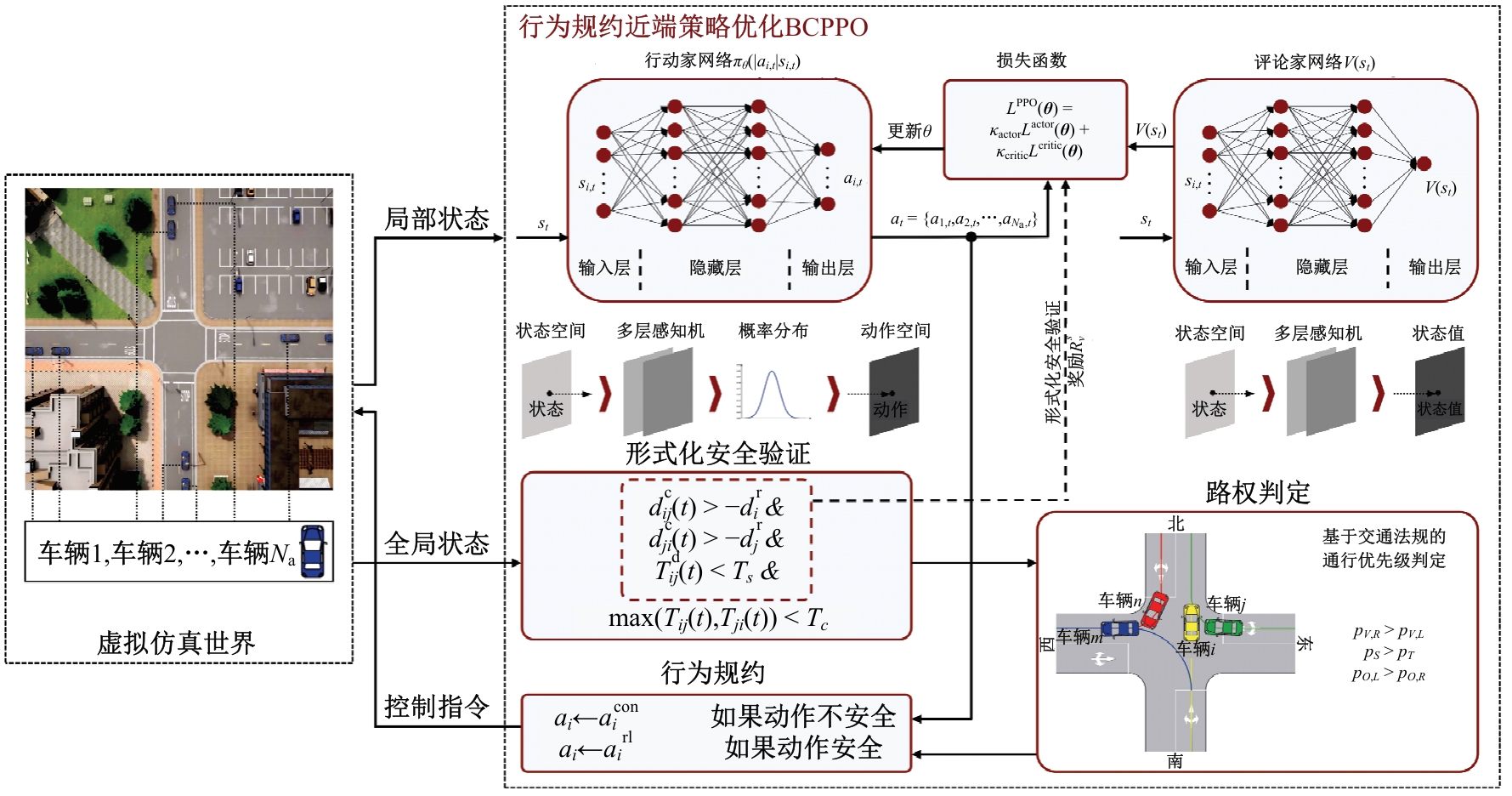
Behavior-constrained proximal policy optimization for autonomous intersection management
Zhen-hai GAO1( ),He-sheng HAO2,Fei GAO1,Rui ZHAO2()
),He-sheng HAO2,Fei GAO1,Rui ZHAO2()
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.College of Automotive Engineering,Jilin University,Changchun 130022,China
CLC Number:
- U491

| [1] | Du Y, Shang G W, Chai L G. A coupled vehicle-signal control method at signalized intersections in mixed traffic environment[J]. IEEE Transactions on Vehicular Technology, 2021, 70(3): 2089-2100. |
| [2] | 庄伟超, 丁昊楠, 董昊轩, 等. 信号交叉口网联电动汽车自适应学习生态驾驶策略[J]. 吉林大学学报:工学版, 2023, 53(1): 82-93. |
| Zhuang Wei-chao, Ding Hao-nan, Dong Hao-xuan, et al. Learning based eco⁃driving strategy of connected electric vehicle at signalized intersection[J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(1): 82-93. | |
| [3] | Khoury J, Khoury J, Zouein G, et al. A practical decentralized access protocol for autonomous vehicles at isolated under-saturated intersections[J]. Journal of Intelligent Transportation Systems, 2019, 23(5): 427-440. |
| [4] | Karthikeyan P, Chen W, Hsiung P. Autonomous intersection management by using reinforcement learning[J]. Algorithms, 2022, 15(9): No.326. |
| [5] | Chamideth S, Tarneberg W, Kihl M. A safe and robust autonomous intersection management system using a hierarchical control strategy and V2I communication[J]. IEEE Systems Journal, 2023, 17(1): 50-61. |
| [6] | Antonio G, Maria-Dolores C. Multi-agent deep reinforcement learning to manage connected autonomous vehicles at tomorrow's intersections[J]. IEEE Transactions on Vehicular Technology, 2022, 71(7): 7033-7043. |
| [7] | Fajardo D, Au T, Waller S T, et al. Automated intersection control[J]. Transportation Research Record: Journal of the Transportation Research Board, 2011, 2259(1): 223-232. |
| [8] | Dresner K, Stone P. A multiagent approach to autonomous intersection management[J]. Journal of Artificial Intelligent Research, 2008, 31(1): 591-656. |
| [9] | Gregoire J, Bonnabel S, Arnaud D. Optimal cooperative motion planning for vehicles at intersections[J/OL].[2023-11-23].. |
| [10] | Lu G, Li L, Wang Y, et al. A rule based control algorithm of connected vehicles in uncontrolled intersection[C]∥The 17th International IEEE Conference on Intelligent Transportation Systems, Qingdao, China,2014: 115-120. |
| [11] | Zhang K, Arnaud D, Zhang D, et al. Analysis and modeled design of one state-driven autonomous passing-through algorithm for driverless vehicles at intersections[C]∥The 16th International Conference on Computational Science and Engineering,Sydney, Australia,2013: 751-757. |
| [12] | Arnaud D. Analysis of reservation algorithms for cooperative planning at intersections[C]∥The 13th International IEEE Conference on Intelligent Transportation Systems,Funchal,Portugal, 2010: 445-449. |
| [13] | Li N, Kolmanovsky I, Girard A, et al. Game theoretic modeling of vehicle interactions at unsignalized intersections and application to autonomous vehicle control[C]∥Annual American Control Conference,Milwaukee, USA,2018: 3215-3220. |
| [14] | Wang H, Meng Q, Chen S. Competitive and cooperative behaviour analysis of connected and autonomous vehicles across unsignalised intersections: a game-theoretic approach[J]. Transportation Research Part B: Methodological, 2021, 149: 322-346. |
| [15] | Elhenawy M, Elbery A A, Hassan A A, et al. An intersection game-theory-based traffic control algorithm in a connected vehicle environment[C]∥IEEE 18th International Conference on Intelligent Transportation Systems,Gran Canaria,Spain,2015: 343-347. |
| [16] | Zhao W, Liu R, Ngoduy D. A bilevel programming model for autonomous intersection control and trajectory planning[J]. Transportmetrica A: Transport Science, 2021, 17(1): 34-58. |
| [17] | Nair S H, Govindarajan V, Lin T, et al. Stochastic MPC with multi-modal predictions for traffic intersections[C]∥IEEE 25th International Conference on Intelligent Transportation Systems,Macau,China, 2022: 635-640. |
| [18] | Kamal M A S, Imura J, Hayakawa T, et al. A vehicle-intersection coordination scheme for smooth flows of traffic without using traffic lights[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 16(3): 1136-1147. |
| [19] | Fink M. Implementation of linear model predictive control-tutorial[J/OL].[2023-11-06]. . |
| [20] | Zhou M, Yu U, Qu X. Development of an efficient driving strategy for connected and automated vehicles at signalized intersections: a reinforcement learning approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 20(1): 433-443. |
| [21] | Guo M, Wang P, Chan C Y, et al. A reinforcement learning approach for intelligent traffic signal control at urban intersections[C]∥IEEE Intelligent Transportation Systems Conference, Auckland, New Zealand,2019: 4242-4247. |
| [22] | Guan Y, Ren Y, Li S, et al. Centralized cooperation for connected and automated vehicles at intersections by proximal policy optimization[J]. IEEE Transactions on Vehicular Technology, 2020, 69(11): 12597-12608. |
| [23] | Wang S, Wan Q. Right-turn driving decisions of autonomous vehicles at signal-free intersections [J]. Application Research of Computers, 2023, 40(5): 1468-1472. |
| [24] | Nordfjarn T, Simseloglu, O, Rundmo T. Culture related to road traffic safety: a comparison of eight countries using two conceptualizations of culture[J]. Accident Analysis and Prevention, 2014, 62: 319-328. |
| [25] | Zheng J, Zhu K, Wang R. Deep reinforcement learning for autonomous vehicles collaboration at unsignalized intersections[C]∥IEEE Global Communications Conference, Rio de Janeiro,Brazil, 2022: 1115-1120. |
| [26] | Teh Y W, Bapst V, Czarnecki W M, et al. Distral: robust multitask reinforcement learning[C]∥Proceedings of the 31st International Conference on Neural Information Processing Systems,Long Beach,USA,2017: 4499-4509. |
| [1] | Tian-jun SUN,Hui-zhe YANG,Rong-gui CAI,Jia-yi FENG,Rui RAN,Bin LIU. Humanized stop⁃and⁃go control strategy for adaptive cruise system of pure electric vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(9): 2847-2857. |
| [2] | Wei-dong LI,Cao-yuan MA,Hao SHI,Heng CAO. An automatic driving decision control algorithm based on hierarchical reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(5): 1798-1805. |
| [3] | Zi-hao SHEN,Yong-sheng GAO,Hui WANG,Pei-qian LIU,Kun LIU. Deep deterministic policy gradient caching method for privacy protection in Internet of Vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(5): 1638-1647. |
| [4] | Zhen-hai GAO,Cheng-yuan ZHENG,Rui ZHAO. Review of active safety verification and validation for autonomous vehicles in real and virtual scenarios [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(4): 1142-1162. |
| [5] | Bing ZHU,Tian-xin FAN,Wen-bo ZHAO,Wei-nan LI,Pei-xing ZHANG. Continuous test scenario complexity evaluation method for automated driving vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(2): 456-467. |
| [6] | Ji-xuan YANG,Gui-hui ZHANG,Zhi-yong CHEN,Wen-ku SHI,Jian LIU,Ren-fei YUAN,Yan-yan ZHAO. Clearance design of taper roller bearings for reducing drive axle whine [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(10): 3141-3150. |
| [7] | Guang-he ZHU,Zhi-qiang ZHU,Yi-ping YUAN. Deep reinforcement learning optimization scheduling algorithm for continuous production line [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(7): 2086-2092. |
| [8] | Jing-peng GAO,Guo-xuan WANG,Lu GAO. LSTM⁃MADDPG multi⁃agent cooperative decision algorithm based on asynchronous collaborative update [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 797-806. |
| [9] | Xiao WU,Wen-ku SHI,Nian-cheng GUO,Yan-yan ZHAO,Zhi-yong CHEN,Xin-peng LI,Zhuo SUN,Jian LIU. Multi-objective optimization of hypoid gears based on Ease off [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(1): 76-85. |
| [10] | Jian ZHANG,Qing-yang LI,Dan LI,Xia JIANG,Yan-hong LEI,Ya-ping JI. Merging guidance of exclusive lanes for connected and autonomous vehicles based on deep reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2508-2518. |
| [11] | Yan-tao TIAN,Yan-shi JI,Huan CHANG,Bo XIE. Deep reinforcement learning augmented decision⁃making model for intelligent driving vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 682-692. |
| [12] | Bai-cang GUO,Guo-feng LUO,Li-sheng JIN,Xian-yi XIE,Dong-xian SUN. Construction method of cut-in scenario library for automatic driving virtual tests [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(11): 3130-3140. |
| [13] | Bao-gang LI,Yu WANG,Fan-wei KONG,Cheng-wei TIAN. Security status updates based on intelligent reflecting surface assistance and age of information metrics [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(10): 3014-3025. |
| [14] | Wei-chao ZHUANG,Hao-nan Ding,Hao-xuan DONG,Guo-dong YIN,Xi WANG,Chao-bin ZHOU,Li-wei XU. Learning based eco⁃driving strategy of connected electric vehicle at signalized intersection [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(1): 82-93. |
| [15] | Xing-tao LIU,Xiao-jian LIU,Ji WU,Yao HE,Xin-tian LIU. State of health estimation method for lithium⁃ion battery based on curve compression and extreme gradient boosting [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1273-1280. |
|
||