吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (7): 2099-2108.doi: 10.13229/j.cnki.jdxbgxb.20210981
• 计算机科学与技术 • 上一篇
基于姿态估计的物体3D运动参数测量方法
王连明1( ),吴鑫2
),吴鑫2
- 1.海南热带海洋学院 海洋信息工程学院,海南 三亚 572022
2.东北师范大学 物理学院,长春 130024
Method for 3D motion parameter measurement based on pose estimation
Lian-ming WANG1(),Xin WU2
- 1.School of Marine Information Engineering,Hainan Tropical Ocean University,Sanya 572022,China
2.School of Physics,Northeast Normal University,Changchun 130024,China
摘要:
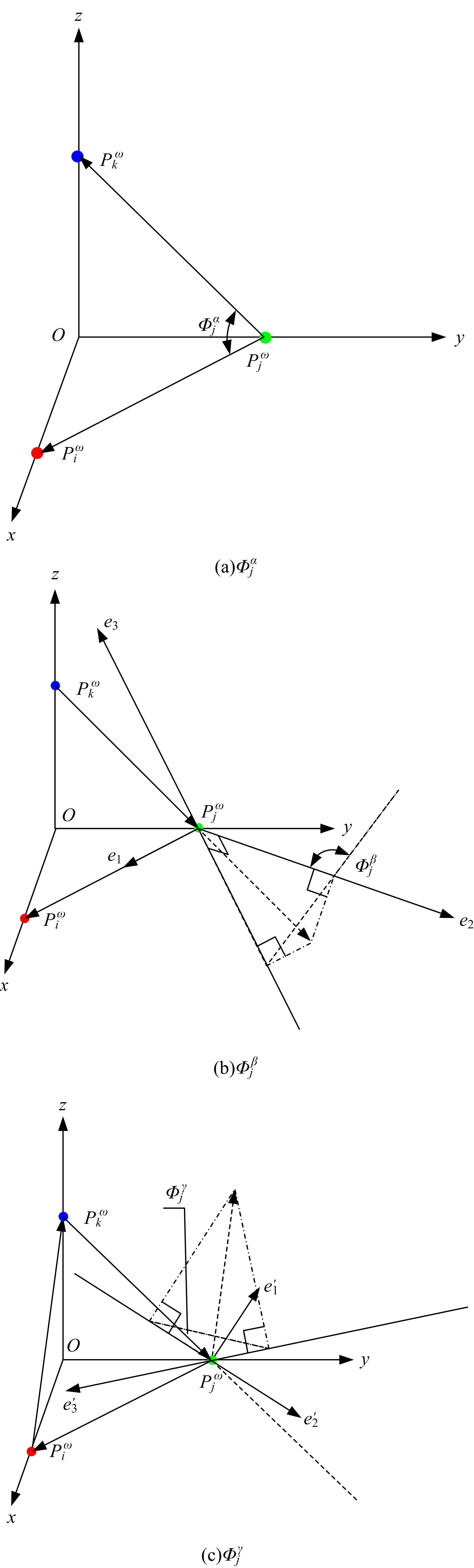
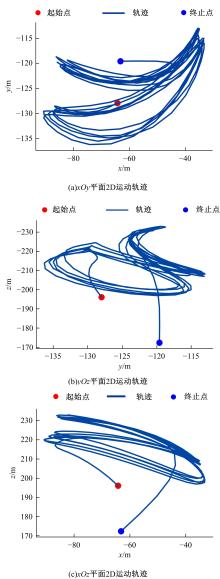
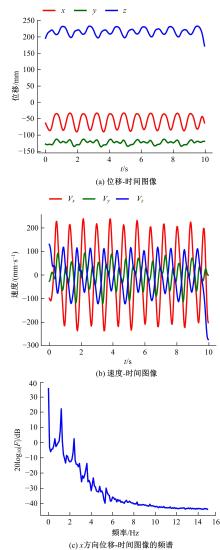
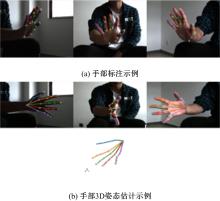
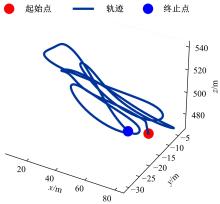
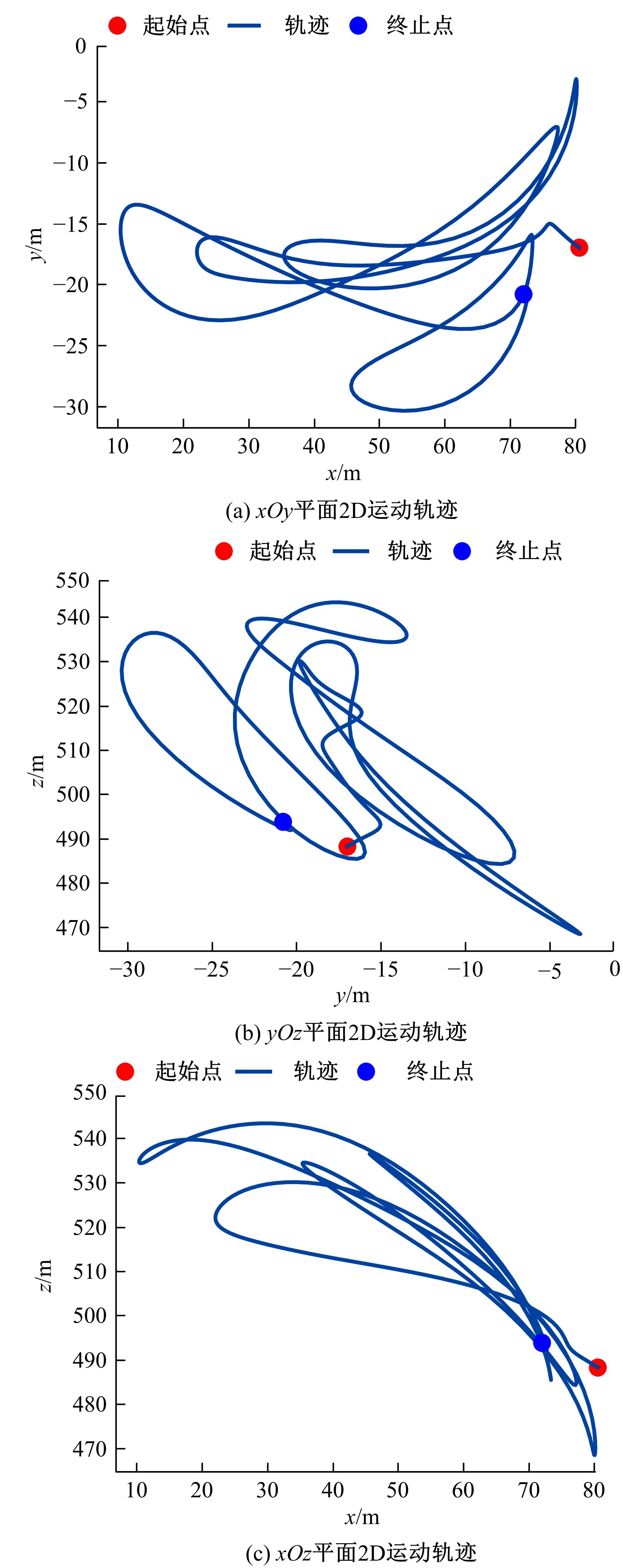
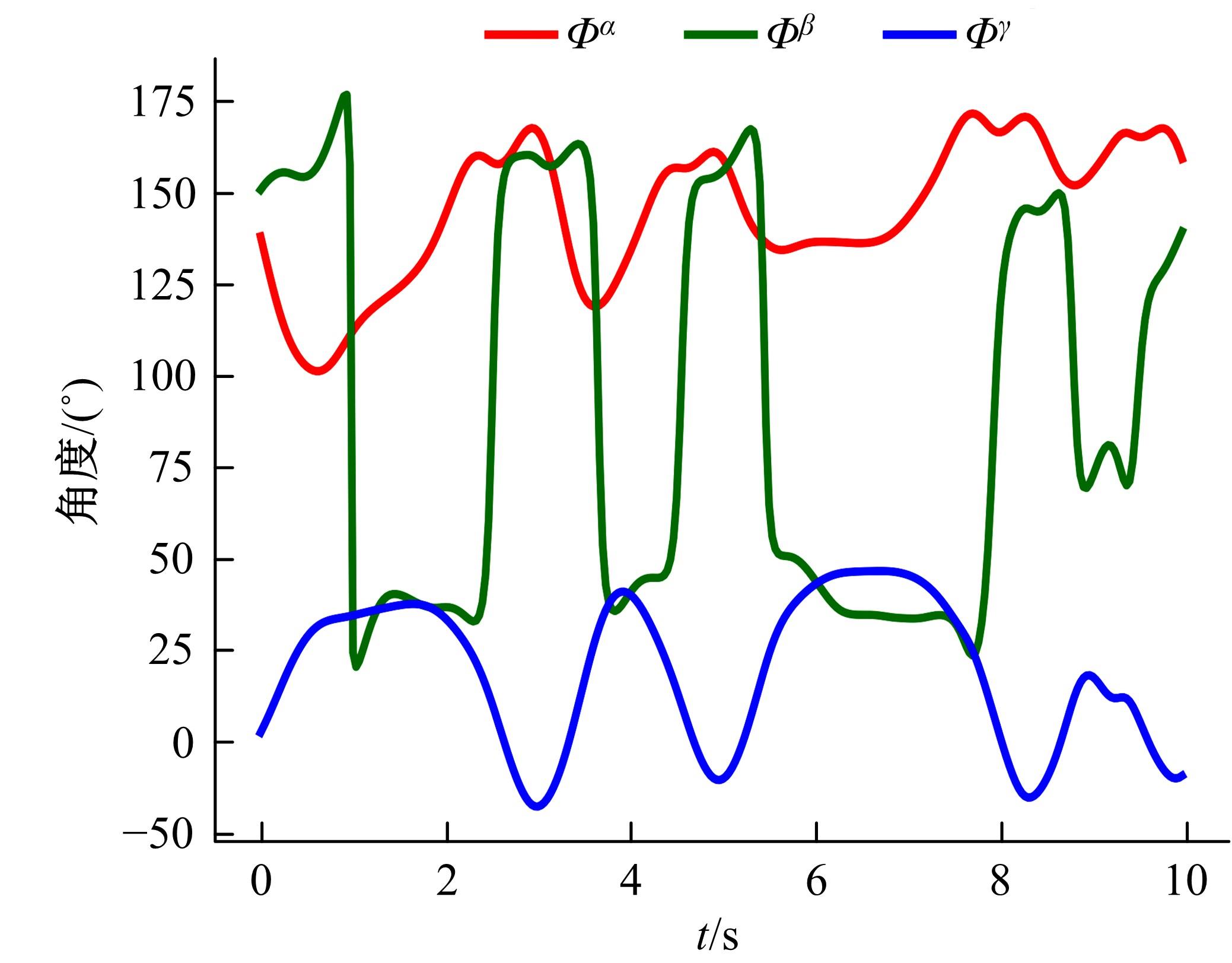
针对传统的物体3D运动参数测量方法存在测量成本高昂、数据融合复杂、提取特征少等问题,提出了一种基于姿态估计的物体3D运动参数非接触式测量方法。首先,使用高帧率同步采集设备从不同视角捕获物体运动视频,弥补了单视角捕获目标容易出现盲区的缺点。其次,使用基于深度迁移学习的2D姿态估计框架DeepLabCut训练目标的2D姿态估计模型,利用模型估计物体不同视角的2D姿态,弥补了传统视觉方法提取特征少的缺点。再次,基于三角测量原理融合不同方向物体的2D姿态估计为3D姿态估计。最后,根据测量需要,利用3D姿态估计的结果可以计算物体指定关键点的位移、速度、姿态角、频率等3D运动参数。以行星摆和人手的运动测量为例,测量了二者的3D运动参数并分析了误差来源以及本研究的优缺点。实验结果表明,系统测量准确,可视化结果正确反映了实验对象的运动情况。该方法为非接触式测量物体3D运动参数提供了新的思路。
中图分类号:
- TP183















| 1 | Haydari A, Yilmaz Y. Deep reinforcement learning for intelligent transportation systems: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2020. |
| 2 | Ju F, Zhu J, Shao B, et al. CopulaNet: learning residue co-evolution directly from multiple sequence alignment for protein structure prediction[J]. Nature Communications, 2021, 12(1): 1-9. |
| 3 | Hermann J, Schätzle Z, Noé F. Deep-neural-network solution of the electronic Schrödinger equation[J]. Nature Chemistry, 2020, 12(10): 891-897. |
| 4 | Wang T M, Tao Y, Liu H. Current researches and future development trend of intelligent robot: a review[J]. International Journal of Automation and Computing, 2018, 15(5): 525-546. |
| 5 | Zhao H, Wang Z. Motion measurement using inertial sensors, ultrasonic sensors, and magnetometers with extended Kalman filter for data fusion[J]. IEEE Sensors Journal, 2011, 12(5): 943-953. |
| 6 | Zeng H, Zhao Y. Sensing movement: Microsensors for body motion measurement[J]. Sensors, 2011, 11(1): 638-660. |
| 7 | Meinhart C D, Wereley S T, Santiago J G. PIV measurements of a microchannel flow[J]. Experiments in Fluids, 1999, 27(5): 414-419. |
| 8 | Sabel J C. Optical 3D motion measurement[C]∥IEEE Instrumentation and Measurement Technology Conference and IMEKO Tec, Brussels, Belgium, 1996: 367-370. |
| 9 | Eltanany A S, Elwan M S, Amein A S. Key Point Detection Techniques[M]. Cham: Springer International Publishing, 2020: 901-911. |
| 10 | Shapiro L, Stockman G. Computer Vision[M]. Upper Saddle River: Prentice Hall, 2001. |
| 11 | Needham L, Evans M, Cosker D P. The accuracy of several pose estimation methods for 3D joint centre localisation[J]. Scientific Reports, 11(1):No.20673. |
| 12 | Nath T, Mathis A, Chen A C, et al. Using DeepLabCut for 3D markerless pose estimation across species and behaviors[J]. Nature Protocols, 2019, 14(7): 2152-2176. |
| 13 | He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 770-778. |
| 14 | Howard A, Sandler M, Chu G, et al. Searching for mobilenetv3[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 2019: 1314-1324. |
| 15 | Tan M, Le Q. Efficientnet: rethinking model scaling for convolutional neural networks[C]∥International Conference on Machine Learning, New York, USA 2019: 6105-6114. |
| 16 | Mathis A, Biasi T, Schneider S, et al. Pretraining boosts out-of-domain robustness for pose estimation[C]∥Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Online, 2021: 1859-1868. |
| 17 | Szeliski R. Computer Vision: Algorithms and Applications[M]. Berlin: Springer Science & Business Media, 2010. |
| 18 | Zhang Z. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. |
| 19 | Karashchuk P, Rupp K L, Dickinson E S, et al. Anipose: a toolkit for robust markerless 3D pose estimation[J]. Cell Reports, 2021, 36(13):No.109730. |
| 20 | Xu Z, Chang X, Xu F, et al. L 1 / 2 regularization: A thresholding representation theory and a fast solver[J]. IEEE Transactions on Neural Networks and Learning Systems, 2012, 23(7): 1013-1027. |
| 21 | Triggs B, McLauchlan P F, Hartley R I, et al. Bundle adjustment—a modern synthesis[C]//International Workshop on Vision Algorithms, Berlin, Germany, 1999: 298-372. |
| 22 | Roithmayr C M, Hodges D H. Dynamics: theory and application of Kane's method[J]. Journal of Computational and Nonlinear Dynamics, 2016, 11(6):No. 066501. |
| [1] | 张振海,季坤,党建武. 基于桥梁裂缝识别模型的桥梁裂缝病害识别方法[J]. 吉林大学学报(工学版), 2023, 53(5): 1418-1426. |
| [2] | 刘培勇,董洁,谢罗峰,朱杨洋,殷国富. 基于多支路卷积神经网络的磁瓦表面缺陷检测算法[J]. 吉林大学学报(工学版), 2023, 53(5): 1449-1457. |
| [3] | 张则强,梁巍,谢梦柯,郑红斌. 混流双边拆卸线平衡问题的精英差分进化算法[J]. 吉林大学学报(工学版), 2023, 53(5): 1297-1304. |
| [4] | 于鹏,朴燕. 基于多尺度特征的行人重识别属性提取新方法[J]. 吉林大学学报(工学版), 2023, 53(4): 1155-1162. |
| [5] | 姜宇,潘家铮,陈何淮,符凌智,齐红. 基于分割方法的繁体中文报纸文本检测[J]. 吉林大学学报(工学版), 2023, 53(4): 1146-1154. |
| [6] | 吴振宇,刘小飞,王义普. 基于DKRRT*-APF算法的无人系统轨迹规划[J]. 吉林大学学报(工学版), 2023, 53(3): 781-791. |
| [7] | 陶博,颜伏伍,尹智帅,武冬梅. 基于高精度地图增强的三维目标检测算法[J]. 吉林大学学报(工学版), 2023, 53(3): 802-809. |
| [8] | 薛珊,张亚亮,吕琼莹,曹国华. 复杂背景下的反无人机系统目标检测算法[J]. 吉林大学学报(工学版), 2023, 53(3): 891-901. |
| [9] | 潘弘洋,刘昭,杨波,孙庚,刘衍珩. 基于新一代通信技术的无人机系统群体智能方法综述[J]. 吉林大学学报(工学版), 2023, 53(3): 629-642. |
| [10] | 何颖,樊俊松,王巍,孙庚,刘衍珩. 无人机空地安全通信与航迹规划的多目标联合优化方法[J]. 吉林大学学报(工学版), 2023, 53(3): 913-922. |
| [11] | 郭鹏,赵文超,雷坤. 基于改进Jaya算法的双资源约束柔性作业车间调度[J]. 吉林大学学报(工学版), 2023, 53(2): 480-487. |
| [12] | 刘近贞,高国辉,熊慧. 用于脑组织分割的多尺度注意网络[J]. 吉林大学学报(工学版), 2023, 53(2): 576-583. |
| [13] | 祁贤雨,王巍,王琳,赵玉飞,董彦鹏. 基于物体语义栅格地图的语义拓扑地图构建方法[J]. 吉林大学学报(工学版), 2023, 53(2): 569-575. |
| [14] | 时小虎,吴佳琦,吴春国,程石,翁小辉,常志勇. 基于残差网络的弯道增强车道线检测方法[J]. 吉林大学学报(工学版), 2023, 53(2): 584-592. |
| [15] | 曲福恒,丁天雨,陆洋,杨勇,胡雅婷. 基于邻域相似性的图像码字快速搜索算法[J]. 吉林大学学报(工学版), 2022, 52(8): 1865-1871. |
|
||