吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (2): 569-575.doi: 10.13229/j.cnki.jdxbgxb20210623
基于物体语义栅格地图的语义拓扑地图构建方法
祁贤雨1( ),王巍2,王琳1,赵玉飞1,董彦鹏1
),王巍2,王琳1,赵玉飞1,董彦鹏1
- 1.北京机械设备研究所,北京 100854
2.北京航空航天大学 机械工程及自动化学院,北京 100191
Semantic topological map building with object semantic grid map
Xian-yu QI1(),Wei WANG2,Lin WANG1,Yu-fei ZHAO1,Yan-peng DONG1
- 1.Beijing Institute of Mechanical Equipment,Beijing 100854,China
2.School of Mechanical Engineering and Automation,Beijing University of Aeronautics and Astronautics,Beijing 100191,China
摘要:
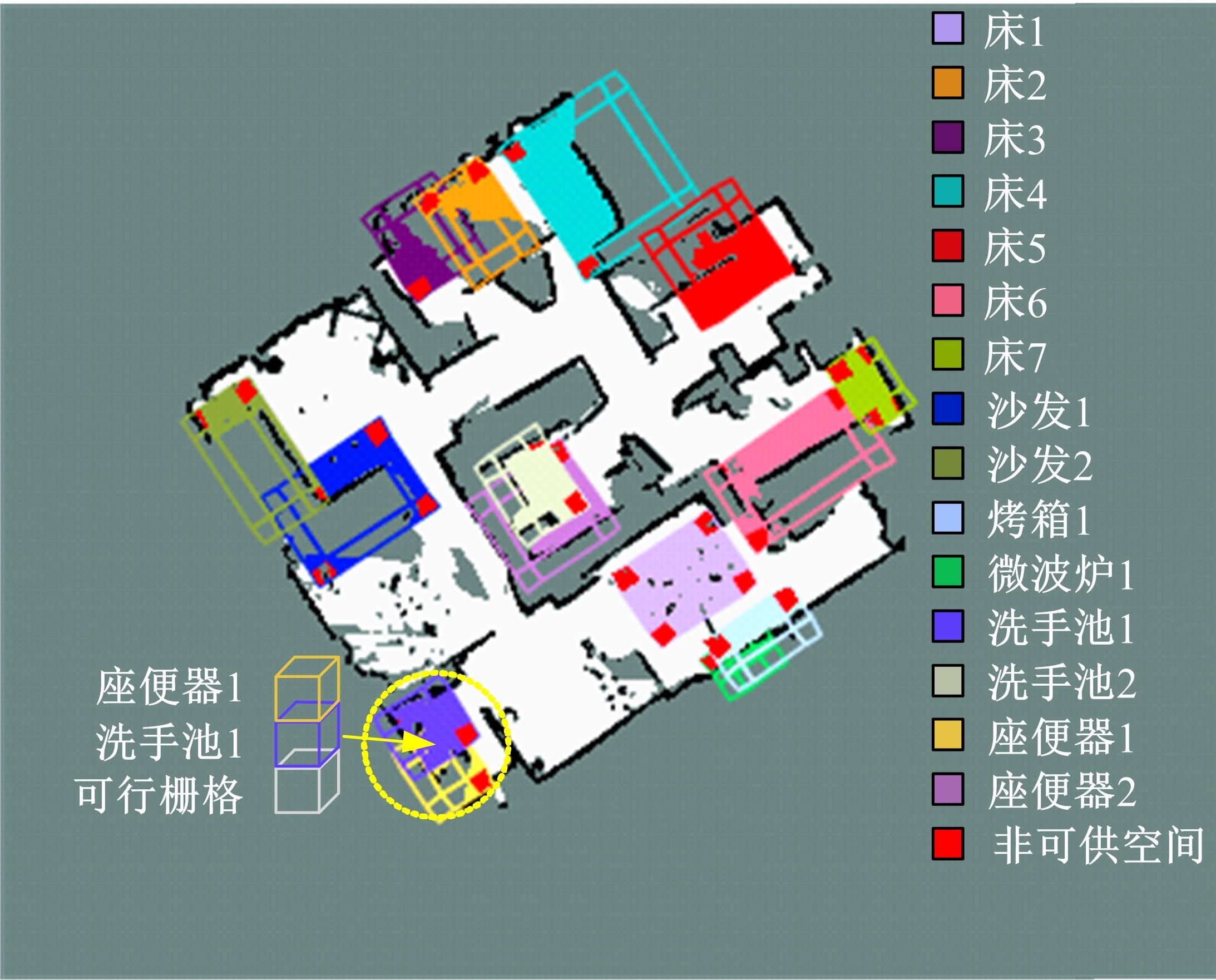
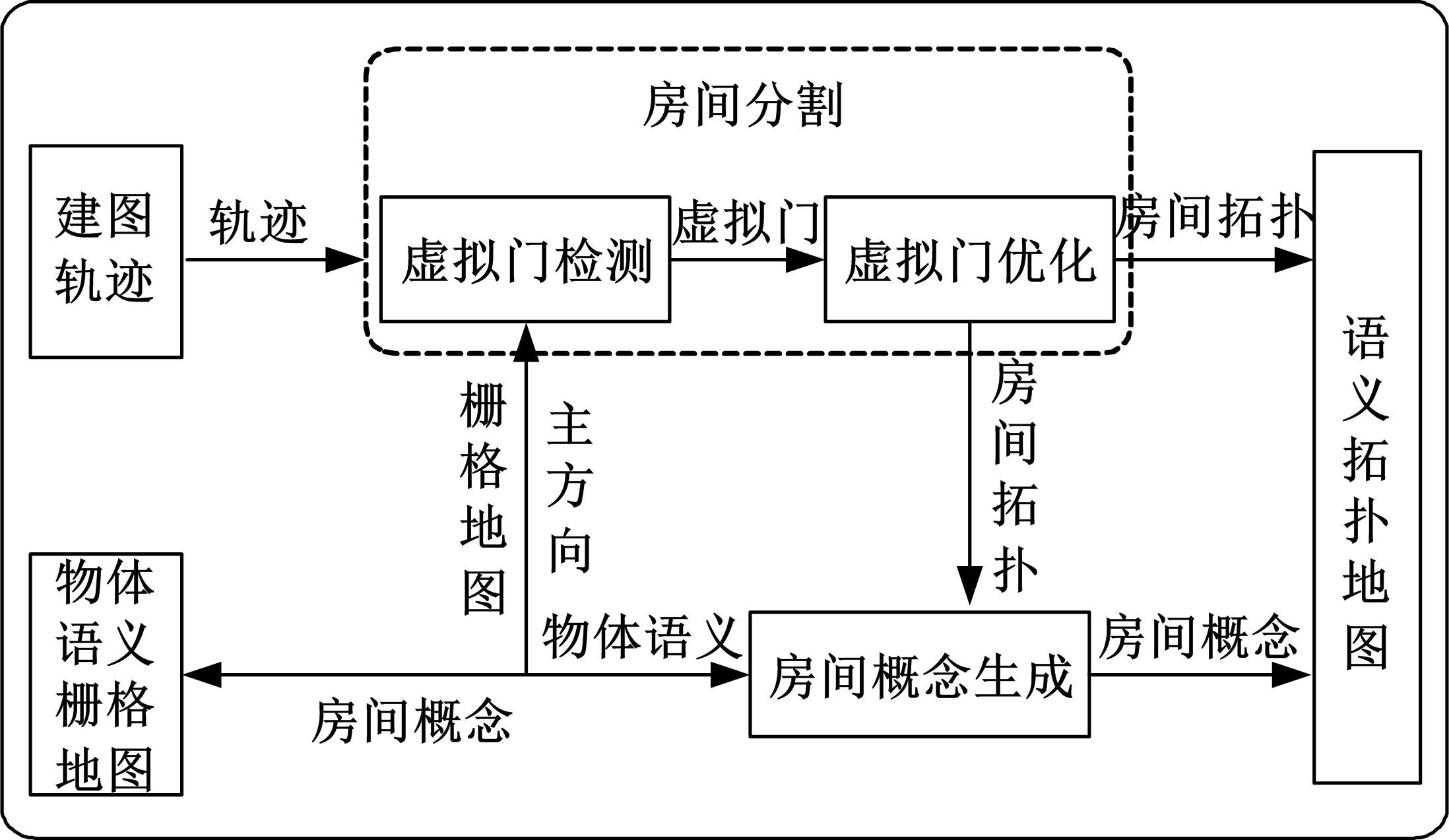
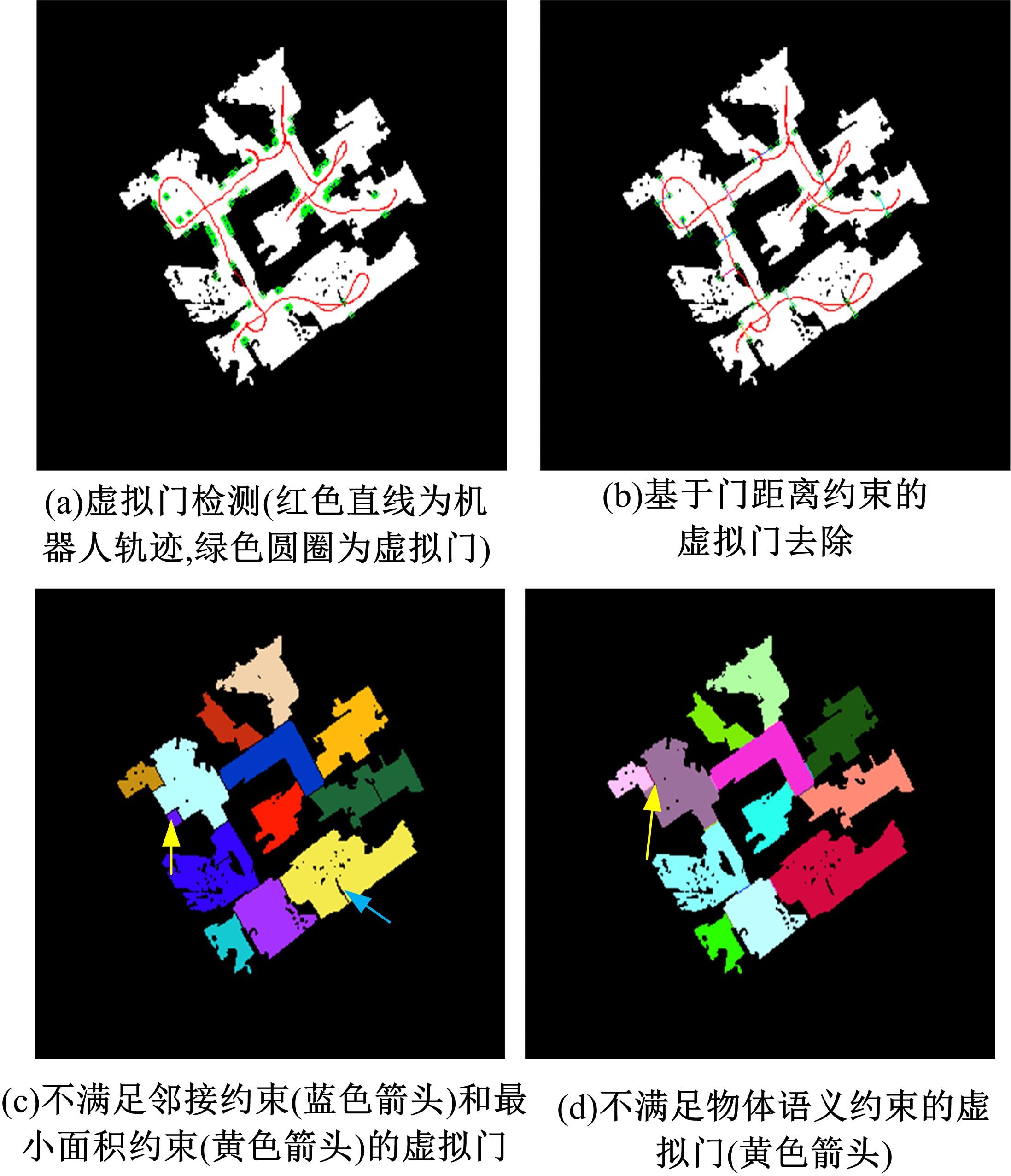
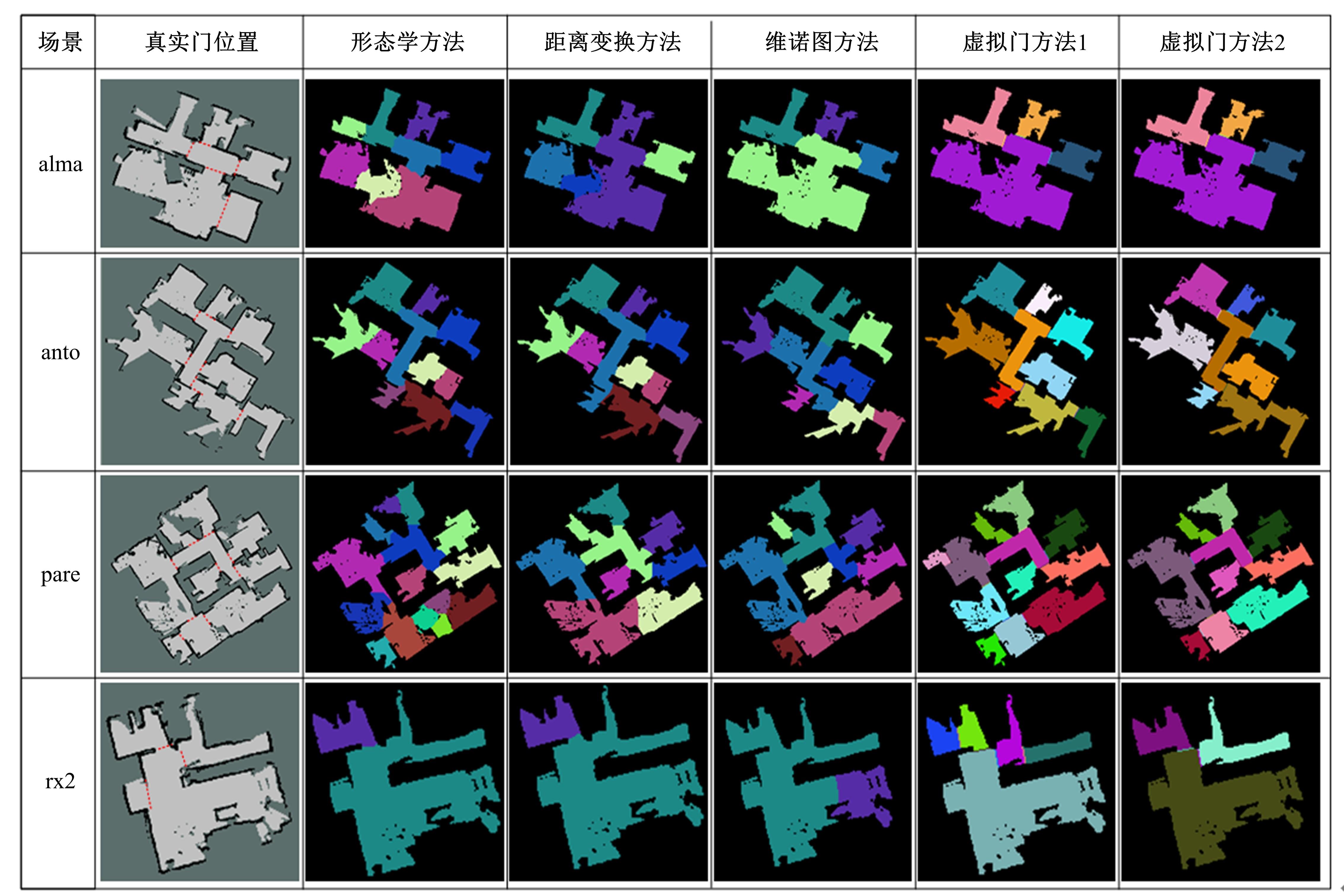
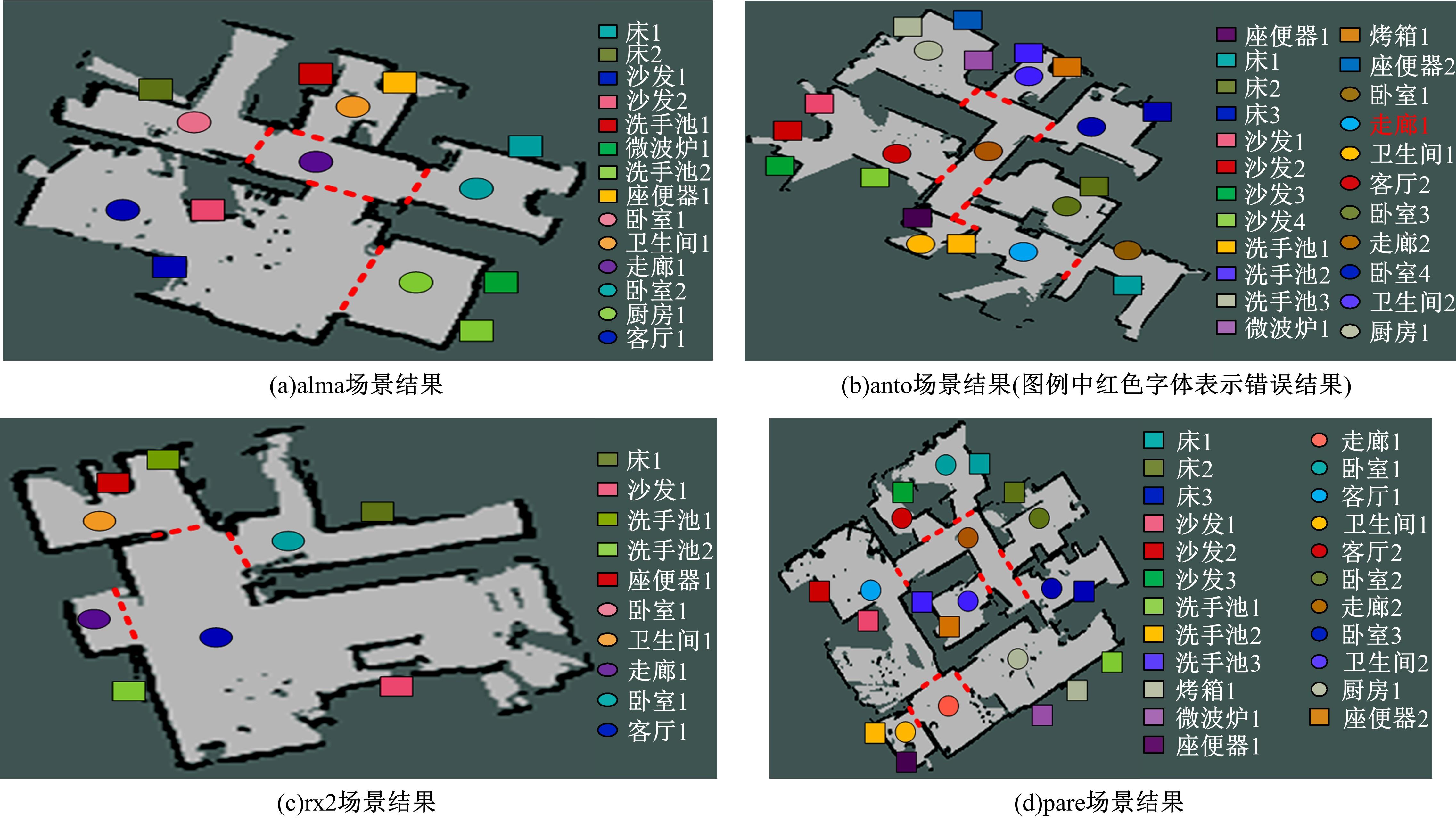
为构建以房间为节点的语义拓扑地图,基于物体语义栅格地图,提出了一种利用虚拟门检测和房间物体包含关系的拓扑分割及房间概念生成方法。首先,依据机器人轨迹和房间主方向,检测满足真实门宽度的占据栅格;然后,采用几何和物体语义约束优化检测结果;最后,利用每个拓扑区域包含的物体语义生成房间概念。通过在多个场景测试,验证了算法的有效性。
中图分类号:
- TP242.6




| 1 | Qi X, Wang W, Guo L, et al. Building a Plutchik's wheel inspired affective model for social robots[J]. Journal of Bionic Engineering, 2019, 16(2): 209-221. |
| 2 | 李嘉菲, 孙小玉.基于谱分解的不确定数据聚类方法[J].吉林大学学报:工学版, 2017, 47(5): 1604-1611. |
| Li Jia-fei, Sun Xiao-yu. Clustering method for uncertain data based on spectral decomposition[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(5): 1604-1611. | |
| 3 | Bormann R, Jordan F, Li W, et al. Room segmentation: survey, implementation, and analysis[C]∥IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 2016: 1019-1026. |
| 4 | Pronobis A, Jensfelt P. Large-scale semantic mapping and reasoning with heterogeneous modalities[C]∥IEEE International Conference on Robotics and Automation, Saint Paul, USA, 2012: 3515-3522. |
| 5 | Zender H, Martínez M O, Jensfelt P, et al. Conceptual spatial representations for indoor mobile robots[J]. Robotics and Autonomous Systems, 2008, 56(6): 493-502. |
| 6 | Joo K, Lee T K, Baek S, et al. Generating topological map from occupancy grid-map using virtual door detection[C]∥IEEE Congress on Evolutionary Computation, Barcelona, Spain, 2010: 1-6. |
| 7 | 祁贤雨, 王巍, 张啸宇, 等. 基于虚拟门检测的室内拓扑地图构建[J]. 吉林大学学报: 工学版, 2020, 50(3): 258-264. |
| Qi Xi-yu, Wang Wei, Zhang Xiao-yu, et al. Indoor topological map building with virtual door detection[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(3): 258-264. | |
| 8 | Gemignani G, Capobianco R, Bastianelli E,et al.Living with robots: interactive environmental knowledge acquisition[J]. Robotics and Autonomous Systems, 2016, 78: 1-16. |
| 9 | Espinace P, Kollar T F, Soto A, et al. Indoor scene recognition through object detection[C]∥IEEE International Conference on Robotics and Automation, Alaska, USA, 2010: 1406-1413. |
| 10 | Fernandez-Chaves D, Ruiz-Sarmiento J R, Petkov N, et al. From object detection to room categorization in robotics[C]∥Proceedings of the 3rd International Conference on Applications of Intelligent Systems, Las Palmas de Gran Canaria, Spain, 2020: 1-6. |
| 11 | Hiller M, Chen Q, Particke F, et al. Learning topometric semantic maps from occupancy grids[C]∥2019 IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, China, 2019: 4190-4197. |
| 12 | Zheng K, Pronobis A. From pixels to buildings: end-to-end probabilistic deep networks for large-scale semantic mapping[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, China, 2019: 3511-3518. |
| 13 | Qi X, Wang W, Liao Z, et al. Object semantic grid mapping with 2D LiDAR and RGB-D camera for domestic robot navigation[J]. Applied Sciences, 2020,10(17): 10175782. |
| 14 | Ruiz-Sarmiento J R, Galindo C, Gonzalez-Jimenez J. Robot@Home, a robotic dataset for semantic mapping of home environments[J]. The International Journal of Robotics Research, 2017, 36(2): 131-141. |
| [1] | 时小虎,吴佳琦,吴春国,程石,翁小辉,常志勇. 基于残差网络的弯道增强车道线检测方法[J]. 吉林大学学报(工学版), 2023, 53(2): 584-592. |
| [2] | 郭鹏,赵文超,雷坤. 基于改进Jaya算法的双资源约束柔性作业车间调度[J]. 吉林大学学报(工学版), 2023, 53(2): 480-487. |
| [3] | 刘近贞,高国辉,熊慧. 用于脑组织分割的多尺度注意网络[J]. 吉林大学学报(工学版), 2023, 53(2): 576-583. |
| [4] | 赵宏伟,张健荣,朱隽平,李海. 基于对比自监督学习的图像分类框架[J]. 吉林大学学报(工学版), 2022, 52(8): 1850-1856. |
| [5] | 秦贵和,黄俊锋,孙铭会. 基于双手键盘的虚拟现实文本输入[J]. 吉林大学学报(工学版), 2022, 52(8): 1881-1888. |
| [6] | 胡丹,孟新. 基于时变网格的对地观测卫星搜索海上船舶方法[J]. 吉林大学学报(工学版), 2022, 52(8): 1896-1903. |
| [7] | 曲福恒,丁天雨,陆洋,杨勇,胡雅婷. 基于邻域相似性的图像码字快速搜索算法[J]. 吉林大学学报(工学版), 2022, 52(8): 1865-1871. |
| [8] | 白天,徐明蔚,刘思铭,张佶安,王喆. 基于深度神经网络的诉辩文本争议焦点识别[J]. 吉林大学学报(工学版), 2022, 52(8): 1872-1880. |
| [9] | 周丰丰,朱海洋. 基于三段式特征选择策略的脑电情感识别算法SEE[J]. 吉林大学学报(工学版), 2022, 52(8): 1834-1841. |
| [10] | 周丰丰,张亦弛. 基于稀疏自编码器的无监督特征工程算法BioSAE[J]. 吉林大学学报(工学版), 2022, 52(7): 1645-1656. |
| [11] | 王军,徐彦惠,李莉. 低能耗支持完整性验证的数据融合隐私保护方法[J]. 吉林大学学报(工学版), 2022, 52(7): 1657-1665. |
| [12] | 康耀龙,冯丽露,张景安,陈富. 基于谱聚类的高维类别属性数据流离群点挖掘算法[J]. 吉林大学学报(工学版), 2022, 52(6): 1422-1427. |
| [13] | 王文军,余银峰. 考虑数据稀疏的知识图谱缺失连接自动补全算法[J]. 吉林大学学报(工学版), 2022, 52(6): 1428-1433. |
| [14] | 陈雪云,贝学宇,姚渠,金鑫. 基于G⁃UNet的多场景行人精确分割与检测[J]. 吉林大学学报(工学版), 2022, 52(4): 925-933. |
| [15] | 方世敏. 基于频繁模式树的多来源数据选择性集成算法[J]. 吉林大学学报(工学版), 2022, 52(4): 885-890. |
|