吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 746-757.doi: 10.13229/j.cnki.jdxbgxb20220560
• 通信与控制工程 • 上一篇
基于决策-规划迭代框架的智驾车换道行为建模
肖雪1( ),李克平1,彭博2,昌满玮1
),李克平1,彭博2,昌满玮1
- 1.同济大学 道路与交通工程教育部重点实验室,上海 201804
2.吉林大学 交通学院,长春 130012
Integrated lane⁃changing model of decision making and motion planning for autonomous vehicles
Xue XIAO1(),Ke-ping LI1,Bo PENG2,Man-wei CHANG1
- 1.Key Laboratory of Road and Traffic Engineering,Ministry of Education,Tongji University,Shanghai 201804,China
2.College of Transportation,Jilin University,Changchun 130012,China
摘要:
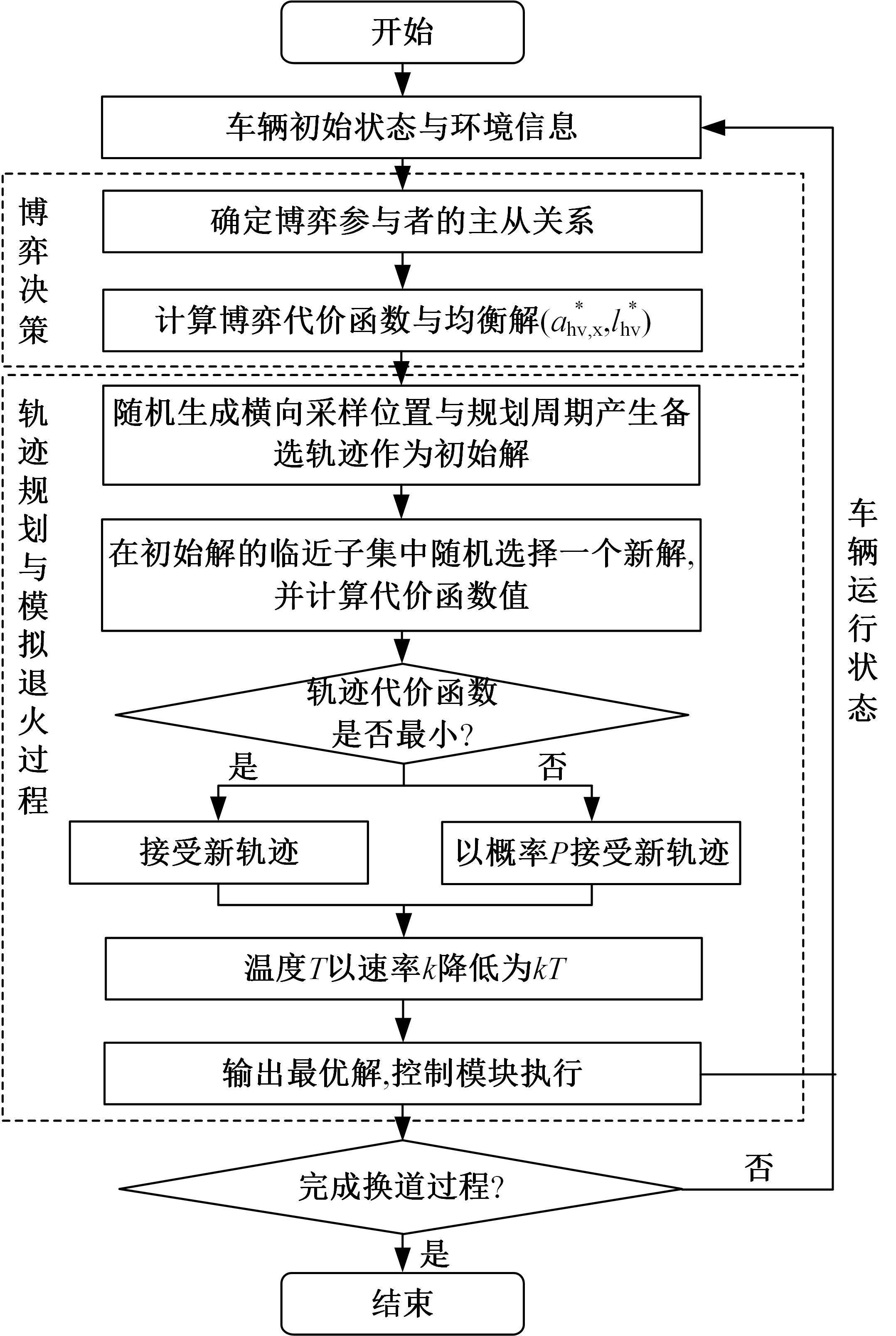
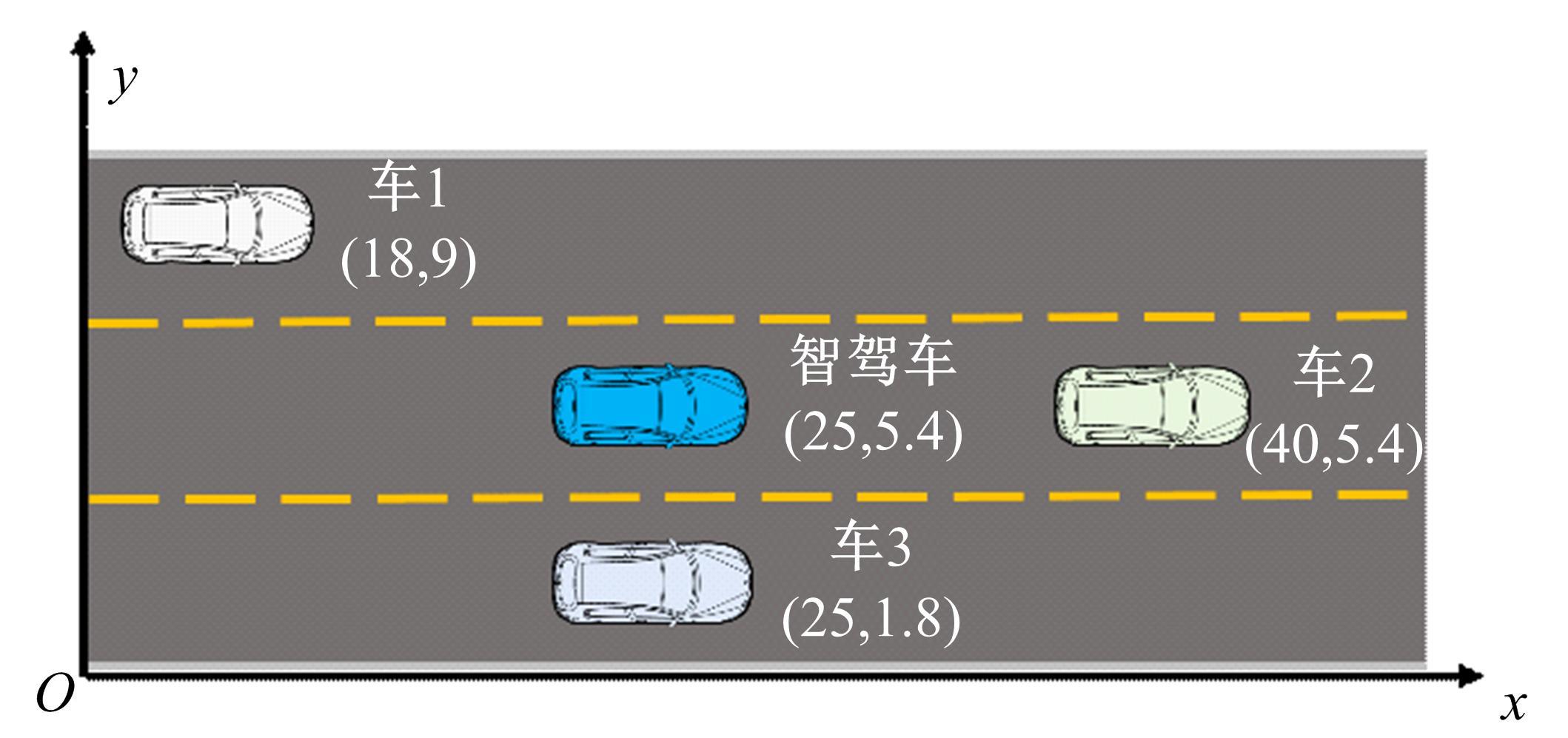
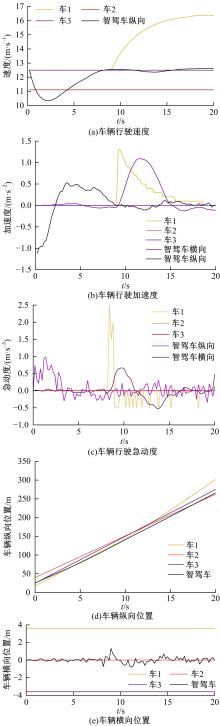
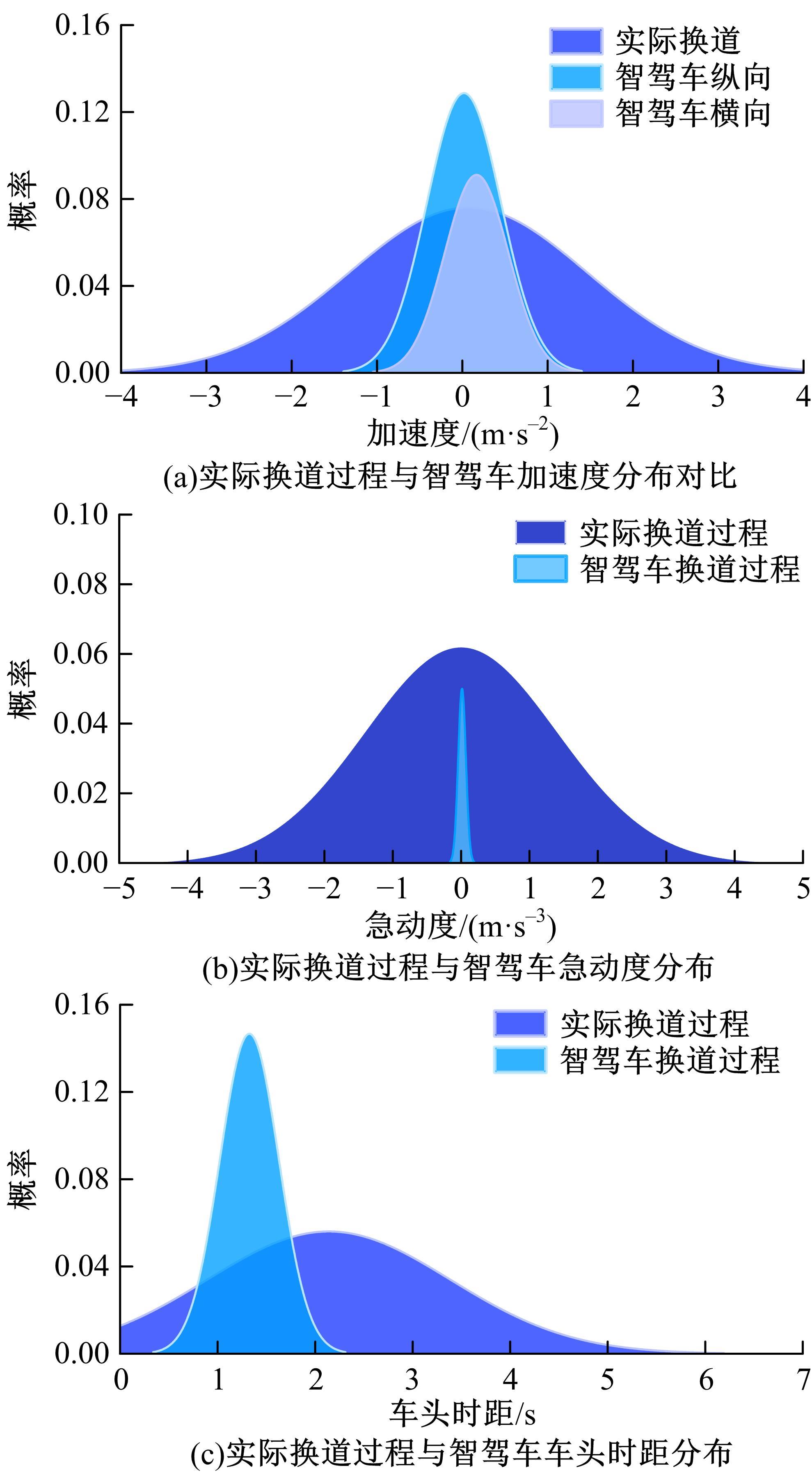
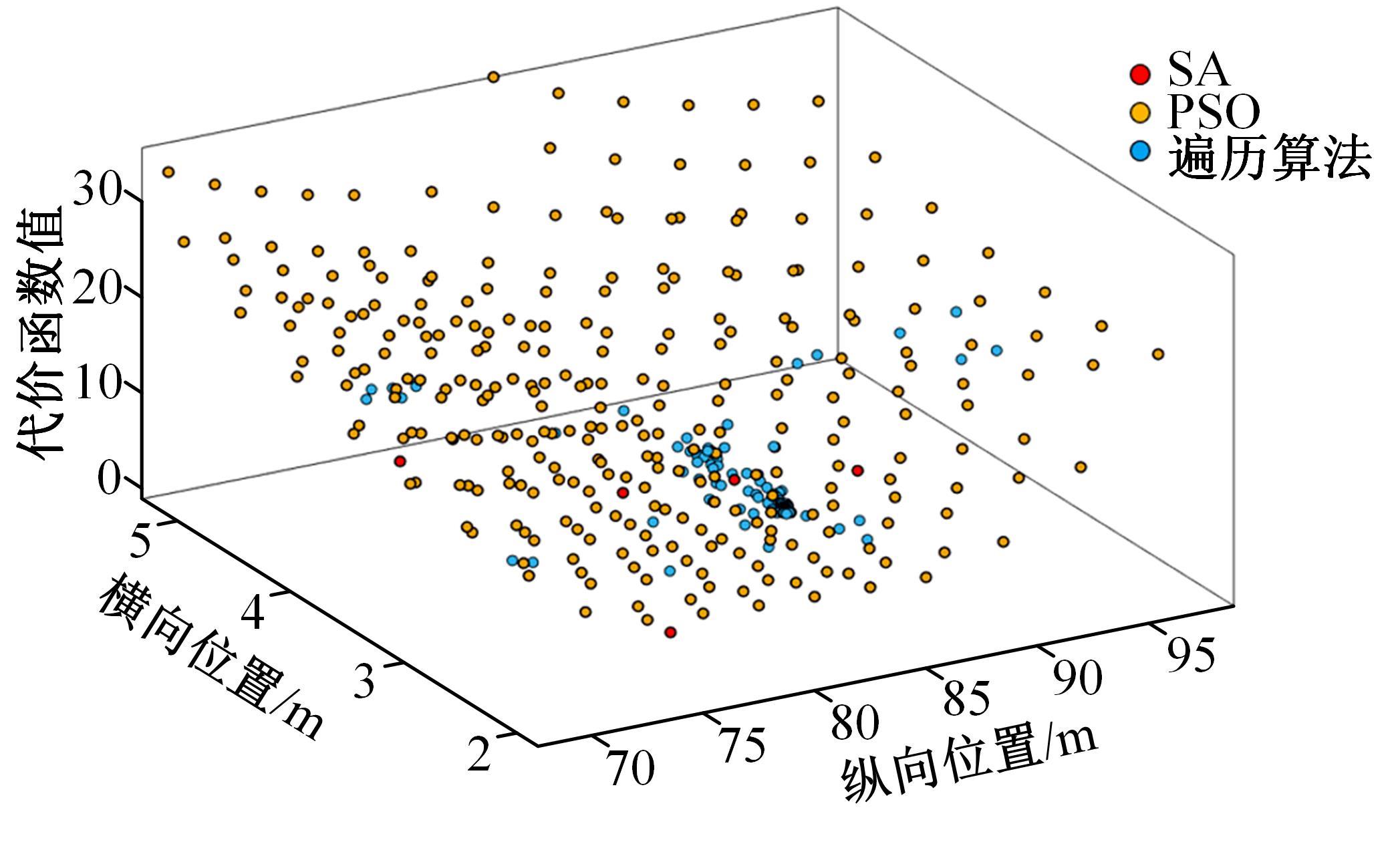
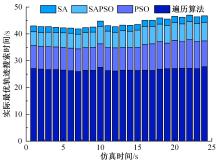
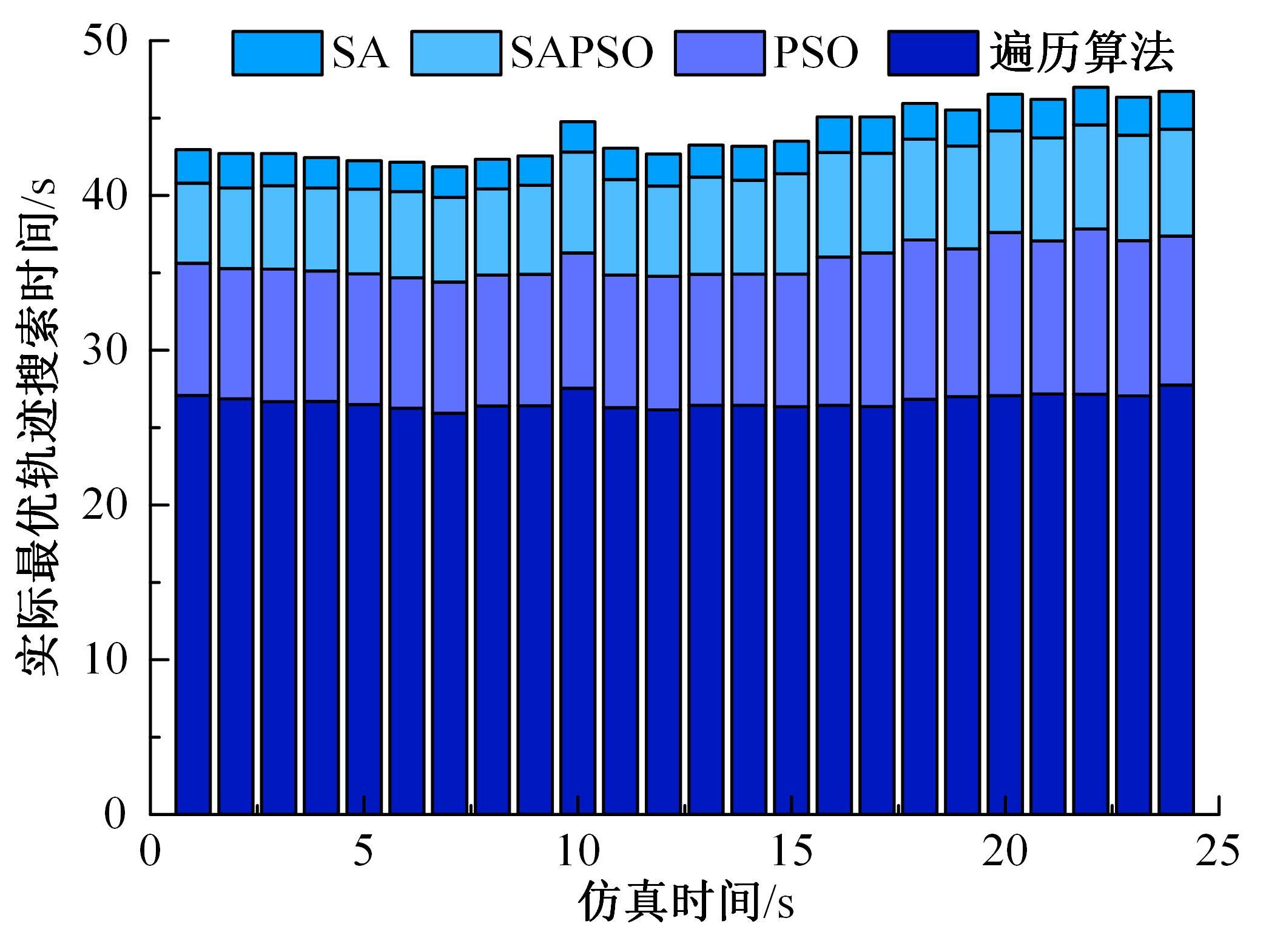
行为决策和轨迹规划是智驾车完成驾驶任务的关键环节,着眼于二者之间的参数传递关系和新型混合交通流的动态特征,建立了智驾车换道模型。采用主从博弈思想描述智驾车换道决策过程,采用负指数函数量化博弈代价函数。将博弈决策结果作为轨迹规划模型输入之一,采用多项式分别描述车辆的横向及纵向运动,利用模拟退火算法寻找最优轨迹。设置了不同驾驶特性的环境车辆,并对决策规划过程进行了仿真验证,结果表明,决策规划模型能够快速生成安全、舒适的可行轨迹。
中图分类号:
- U491.2









| 1 | Hang P, Lv C, Huang C, et al. An integrated framework of decision making and motion planning for autonomous vehicles considering social behaviors[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14458-14469. |
| 2 | Lu Y, Xu X, Zhang X, et al. Hierarchical reinforcement learning for autonomous decision making and motion planning of intelligent vehicles[J]. IEEE Access, 2020, 8: 209776-209789. |
| 3 | Lee N, Choi W, Vernaza P, et al. Desire: distant future prediction in dynamic scenes with interacting agents[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, America, 2017: 2156-2174. |
| 4 | Xu W, Pan J, Wei J, et al. Motion planning under uncertainty for on-road autonomous driving[C]∥2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 2014: 2507-2512. |
| 5 | Schmerling E, Leung K, Vollprecht W, et al. Multimodal probabilistic model-based planning for human-robot interaction[C]∥2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 2018: 1-9. |
| 6 | Gindele T, Brechtel S, Dillmann R. Learning driver behavior models from traffic observations for decision making and planning[J]. IEEE Intelligent Transportation Systems Magazine, 2015, 7(1): 69-79. |
| 7 | Schulz J, Hubmann C, Löchner J, et al. Interaction-aware probabilistic behavior prediction in urban environments[C]∥2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018: 3999-4006. |
| 8 | Althoff M, Mergel A. Comparison of markov chain abstraction and monte carlo simulation for the safety assessment of autonomous cars[J]. IEEE Transaction on Intelligent Transportation System, 2011, 12(4): 1237-1247. |
| 9 | Kamrani M, Srinivasan A R, Chakraborty S, et al. Applying markov decision process to understand driving decisions using basic safety messages data[J]. Transportation Research Part C: Emerging Technologies, 2020, 115: 1-16. |
| 10 | Vallon C, Ercan Z, Carvalho A, et al. A machine learning approach for personalized autonomous lane change initiation and control[C]∥2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, America, 2017: 1590-1595. |
| 11 | Lenz D, Diehl F, Le M T, et al. Deep neural networks for Markovian interactive scene prediction in highway scenarios[C]∥Intelligent Vehicles Symposium, Los Angeles, America, 2017: 685-692. |
| 12 | Xie D F, Fang Z, Jia B, et al. A data-driven lane-changing model based on deep learning[J]. Transportation Research Part C: Emerging Technologies, 2019, 106(2019): 41-60. |
| 13 | Morton J, Wheeler T A, Kochenderfer M J. Analysis of recurrent neural networks for probabilistic modeling of driver behavior[J]. IEEE Transaction on Intelligent Transportation System, 2017, 18(5): 1289-1298. |
| 14 | Yu H T, Tseng H E, Langari R, et al. A human-like game theory-based controller for automatic lane changing[J]. Transportation Research Part C: Emerging Technologies, 2018, 88(5): 140-158. |
| 15 | 胡益恺, 庄瀚洋, 王春香, 等. 基于主从博弈的智能车汇流场景决策方法[J]. 上海交通大学学报, 2021, 55(8): 1027-1034. |
| Hu Yi-kai, Zhuang Han-yang, Wang Chun-xiang, et al. Stackelberg-game-based intelligent vehicle decision method for merging scenarios[J]. Journal of Shanghai Jiaotong University, 2021, 55(8):1027-1034. | |
| 16 | Kang K, Rakha H A. A repeated game freeway lane changing model[J]. Sensors, 2020, 20(6):1554-1588. |
| 17 | Hang P, Lv C, Huang C, et al. An integrated framework of decision making and motion planning for autonomous vehicles considering social behaviors[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14458-14469. |
| 18 | Katrakazas C, Quddus M, Chen W H, et al. Real-time motion planning methods for autonomous on-road driving: state-of-the-art and future research directions[J]. Transportation Research Part C: Emerging Technologies, 2015, 60: 416-442. |
| 19 | Gonzalez D, Pérez J, Milanes V, et al. A review of motion planning techniques for automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4): 1135-1145. |
| 20 | Lim W, Lee S, Sunwoo M, et al. Hybrid trajectory planning for autonomous driving in on-road dynamic scenarios[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 22(1): 341-355. |
| 21 | Xu W D, Wei J Q, Dolan J M, et al. A real-time motion planner with trajectory optimization for autonomous vehicles[C]∥2012 IEEE International Conference on Robotics and Automation, St Paul, America, 2012: 2061-2067. |
| 22 | Ziegler J, Bender P, Dang T, et al. Trajectory planning for Bertha-A local continuous method[C]∥Intelligent Vehicles Symposium, Michigan, America, 2014: 450-457. |
| 23 | Jiang Y, Jin X, Xiong Y, et al. A dynamic motion planning framework for autonomous driving in urban environments[C]∥In Proceedings of the 2020 39th Chinese Control Conference, Shenyang, China, 2020: 5429-5435. |
| 24 | Liao X, Zhao X, Wu G, et al. A game theory based ramp merging strategy for connected and automated vehicles in the mixed traffic: a Unity-SUMO integrated platform[DB/OL]. [2022-01-27]. |
| 25 | Zhou D, Ma Z, Sun J. Autonomous vehicles turning motion planning in multi-interaction area of mixed-flow intersections[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5(2): 204-216. |
| 26 | Chu K, Lee M, Sunwoo M. Local path planning for off-road autonomous driving with avoidance of static obstacles[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4): 1599-1616. |
| 27 | Werling M, Kammel S, Ziegler J, et al. Optimal trajectories for time-critical street scenarios using discretized terminal manifolds[J]. International Journal of Robotics Research, 2012, 31(3): 346-359. |
| 28 | 陈华根, 吴健生, 王家林,等. 模拟退火算法机理研究[J]. 同济大学学报:自然科学版, 2004, 32(6): 802-805. |
| Chen Hua-gen, Wu Jian-sheng, Wang Jia-lin, et al. Mechanism study of simulated annealing algorithm[J]. Journal of Tongji University (Natural Science), 2004, 32(6): 802-805. | |
| 29 | Kirkpatrick S, Gelatt C D, Vecchi M P. Optimization by simulated annealing[J]. Science, 1983, 220(4598): 671-680. |
| 30 | 唐俊. PSO算法原理及应用[J]. 计算机技术与发展, 2010, 20(2): 213-216. |
| Tang Jun. Principle and application of PSO algorithm[J]. Computer Technology and Development, 2010, 20(2): 213-216. | |
| 31 | Qiao F, Rahman R, Li Q, et al. Safe and environment-friendly forward collision warning messages in the advance warning area of a construction zone[J]. International Journal of Intelligent Transportation Systems Research, 2017, 15: 166-179. |
| 32 | Vishal M, Christos K, Constantinos A. Prediction of lane-changing maneuvers with automatic labeling and deep learning[J]. Transportation Research Record, 2020, 2674(7): 336-347. |
| [1] | 潘弘洋,刘昭,杨波,孙庚,刘衍珩. 基于新一代通信技术的无人机系统群体智能方法综述[J]. 吉林大学学报(工学版), 2023, 53(3): 629-642. |
| [2] | 马敏,胡大伟,舒兰,马壮林. 城市轨道交通网络韧性评估及恢复策略[J]. 吉林大学学报(工学版), 2023, 53(2): 396-404. |
| [3] | 王菁,万峰,董春娇,邵春福. 城市轨道交通站点吸引范围及强度建模[J]. 吉林大学学报(工学版), 2023, 53(2): 439-447. |
| [4] | 方松,马健霄,李根,沈玲宏,徐楚博. 城市快速路右侧车道移动作业区行车风险分析[J]. 吉林大学学报(工学版), 2022, 52(8): 1786-1791. |
| [5] | 宋现敏,杨舒天,刘明鑫,李志慧. 站点间公交行程时间波动特性及预测方法[J]. 吉林大学学报(工学版), 2022, 52(8): 1792-1799. |
| [6] | 张玮,张树培,罗崇恩,张生,王国林. 智能汽车紧急工况避撞轨迹规划[J]. 吉林大学学报(工学版), 2022, 52(7): 1515-1523. |
| [7] | 郑植,耿波,王福敏,董俊宏,魏思斯. 既有低等级混凝土护栏防护能力提升[J]. 吉林大学学报(工学版), 2022, 52(6): 1362-1374. |
| [8] | 吴文静,战勇斌,杨丽丽,陈润超. 考虑安全间距的合流区可变限速协调控制方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1315-1323. |
| [9] | 徐洪峰,陈虹瑾,张栋,陆千惠,安娜,耿现彩. 面向网联汽车环境的单点全感应式信号配时技术[J]. 吉林大学学报(工学版), 2022, 52(6): 1324-1336. |
| [10] | 盖松雪,曾小清,岳晓园,袁子豪. 基于用户-系统双层优化算法的车位引导模型[J]. 吉林大学学报(工学版), 2022, 52(6): 1344-1352. |
| [11] | 李先通,全威,王华,孙鹏程,安鹏进,满永兴. 基于时空特征深度学习模型的路径行程时间预测[J]. 吉林大学学报(工学版), 2022, 52(3): 557-563. |
| [12] | 冯天军,孙学路,黄家盛,田秀娟,宋现敏. 基于三种过街方式的两相位信号交叉口延误[J]. 吉林大学学报(工学版), 2022, 52(3): 550-556. |
| [13] | 李兴华,冯飞宇,成诚,王洧,唐鹏程. 网约拼车服务选择偏好分析及建模[J]. 吉林大学学报(工学版), 2022, 52(3): 578-584. |
| [14] | 尹超英,邵春福,黄兆国,王晓全,王晟由. 基于梯度提升决策树的多尺度建成环境对小汽车拥有的影响[J]. 吉林大学学报(工学版), 2022, 52(3): 572-577. |
| [15] | 贾洪飞,邵子函,杨丽丽. 终点不确定条件下网约车合乘匹配模型及算法[J]. 吉林大学学报(工学版), 2022, 52(3): 564-571. |
|
||