吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (5): 1257-1263.doi: 10.13229/j.cnki.jdxbgxb.20210886
• 车辆工程·机械工程 •
一种基于转向意图的车辆敏捷性控制策略
陈磊1( ),王杨2(),董志圣2,宋亚奇1,2
),王杨2(),董志圣2,宋亚奇1,2
- 1.汽车振动噪声与安全控制综合技术国家重点实验室,长春 130011
2.浙江孔辉汽车科技有限公司,浙江 湖州 313002
A vehicle agility control strategy based on steering intent
Lei CHEN1(),Yang WANG2(),Zhi-sheng DONG2,Ya-qi SONG1,2
- 1.State Key Laboratory of Integrated Technology of Automotive Vibration and Noise and Safety Control,Changchun 130011,China
2.KH Automotive Technologies (Huzhou) Co. ,Ltd. ,Huzhou 313002,China
摘要:
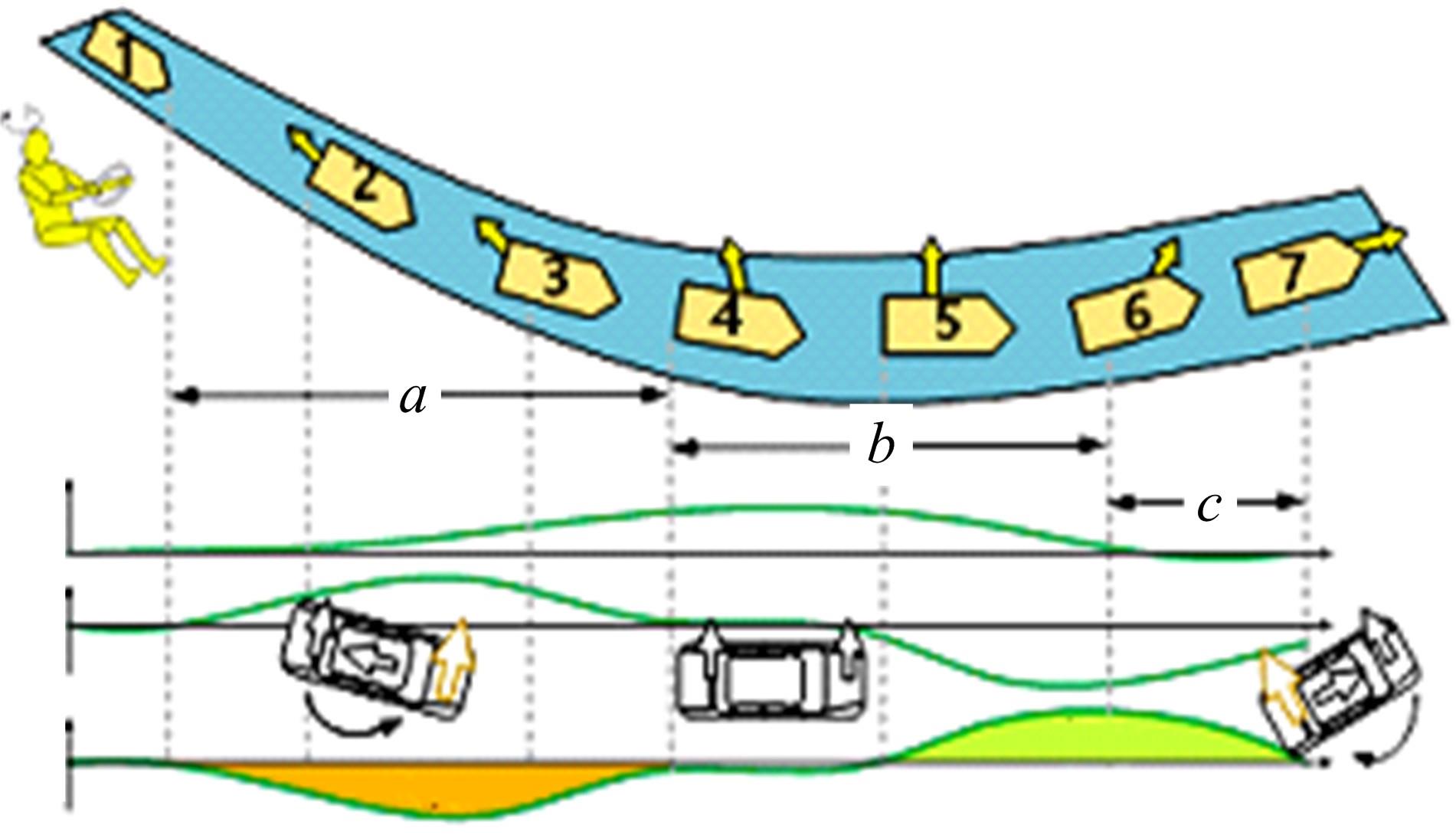
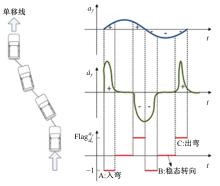
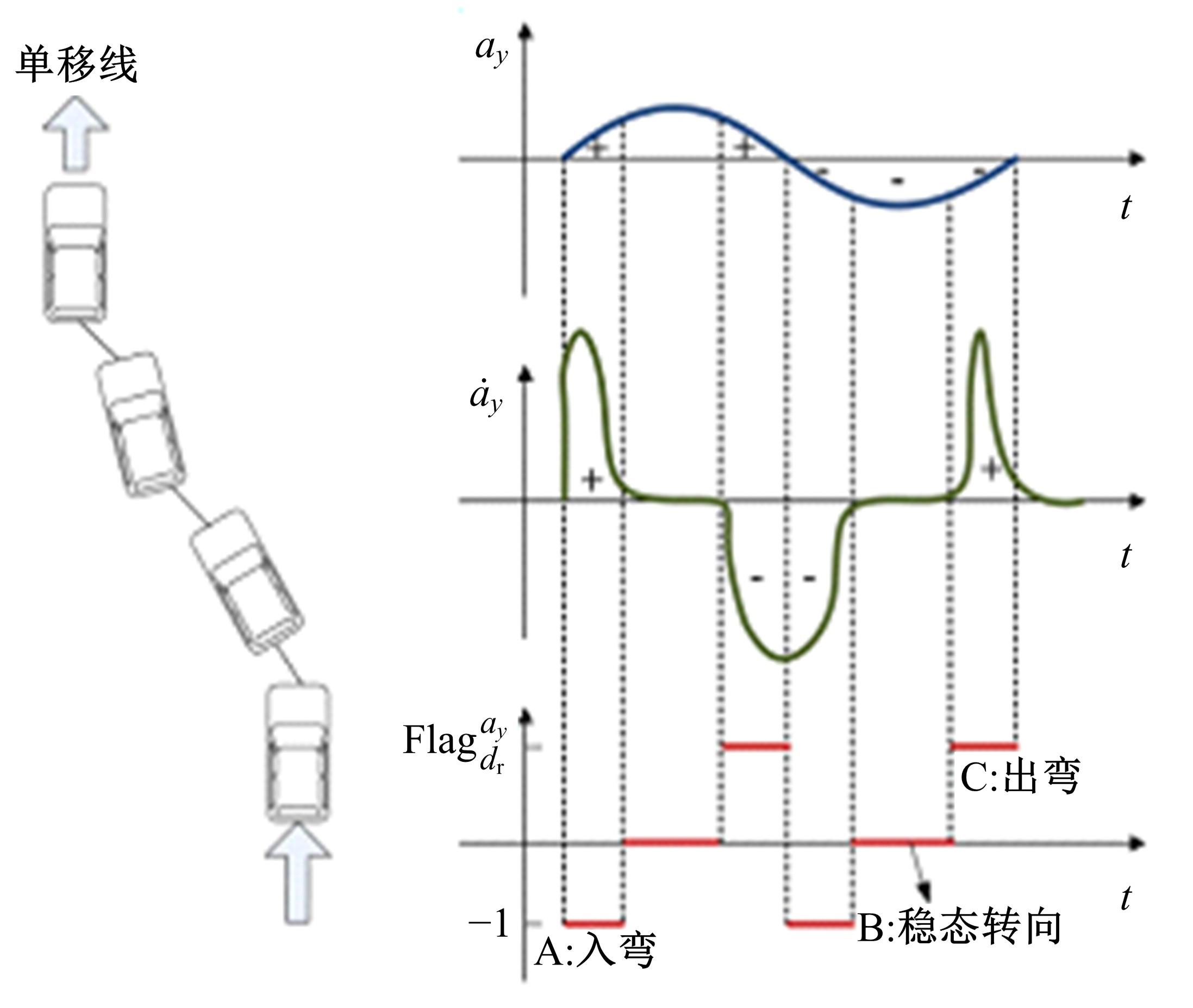
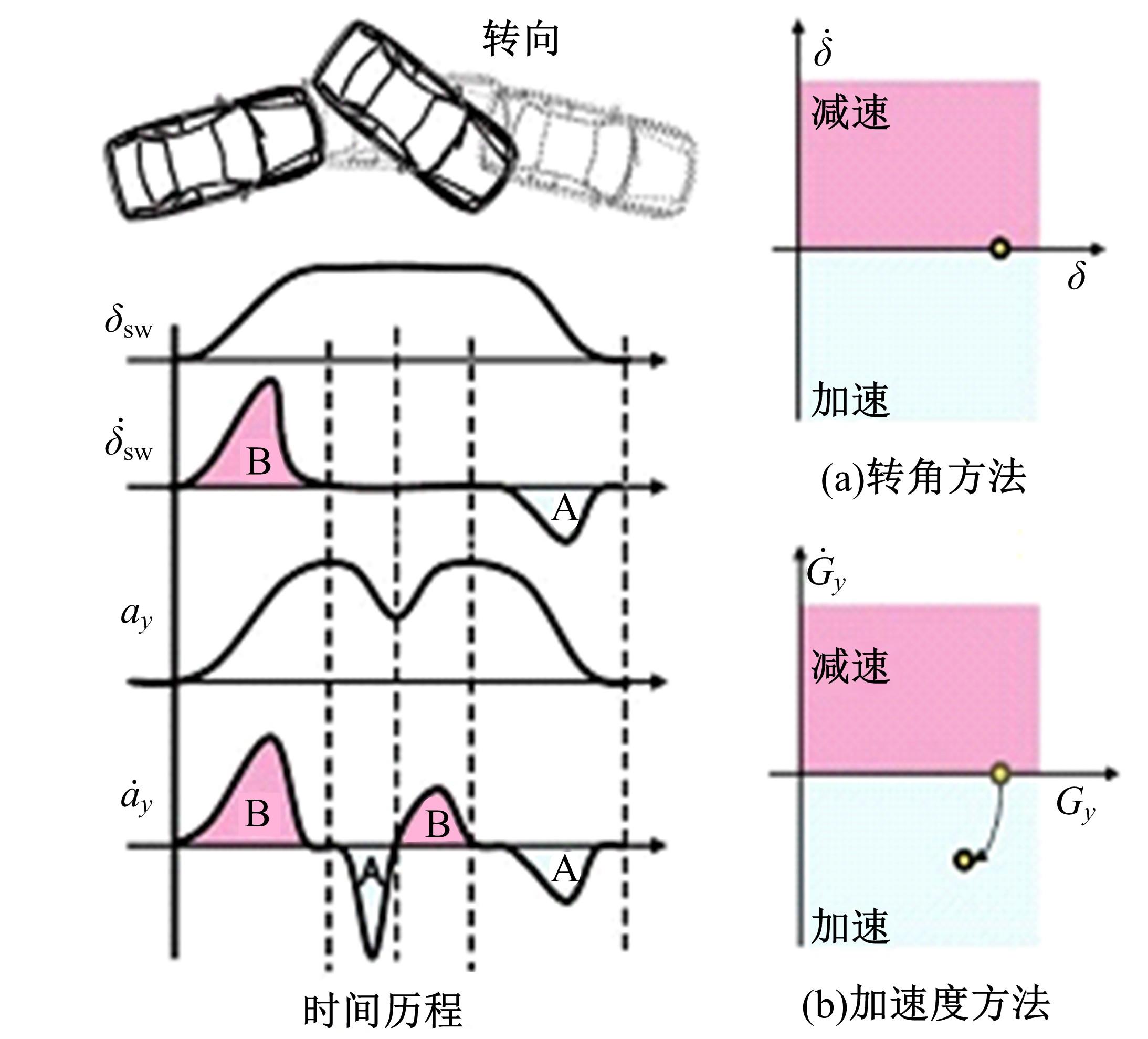
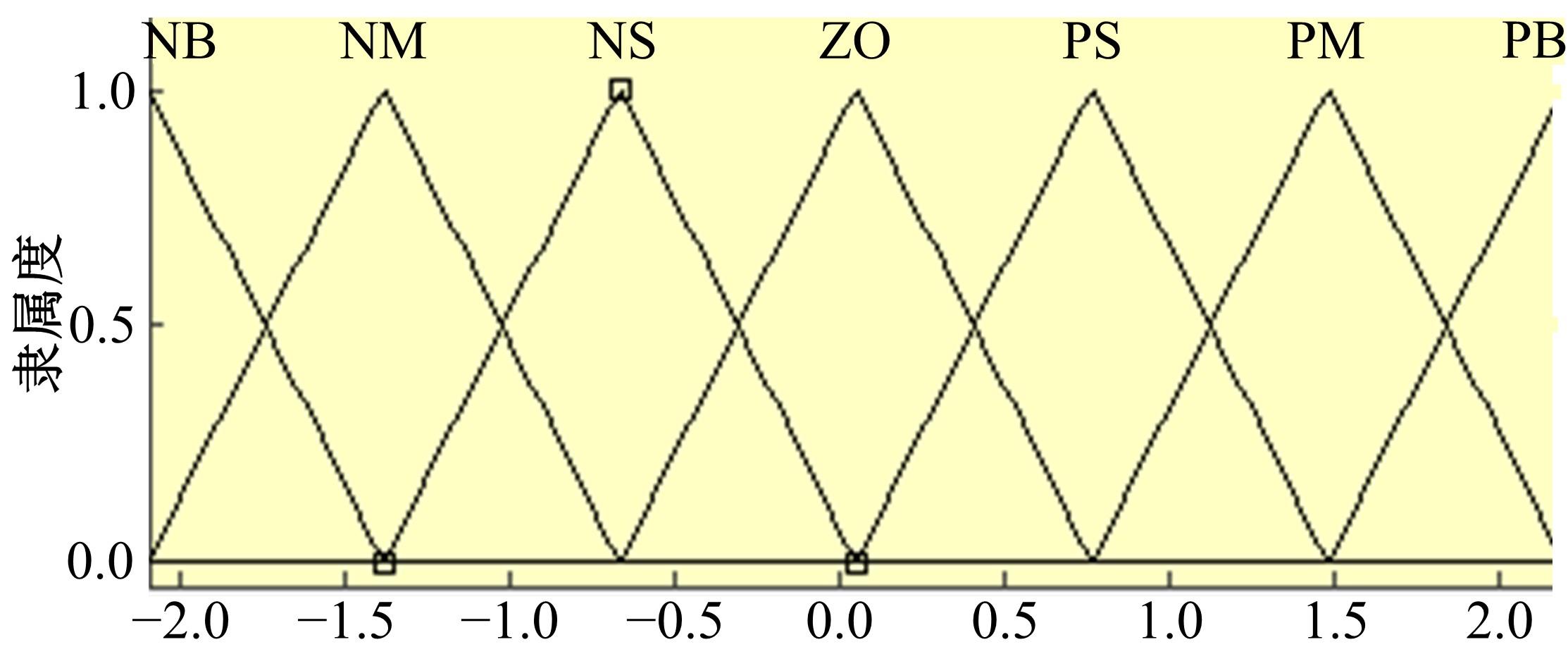
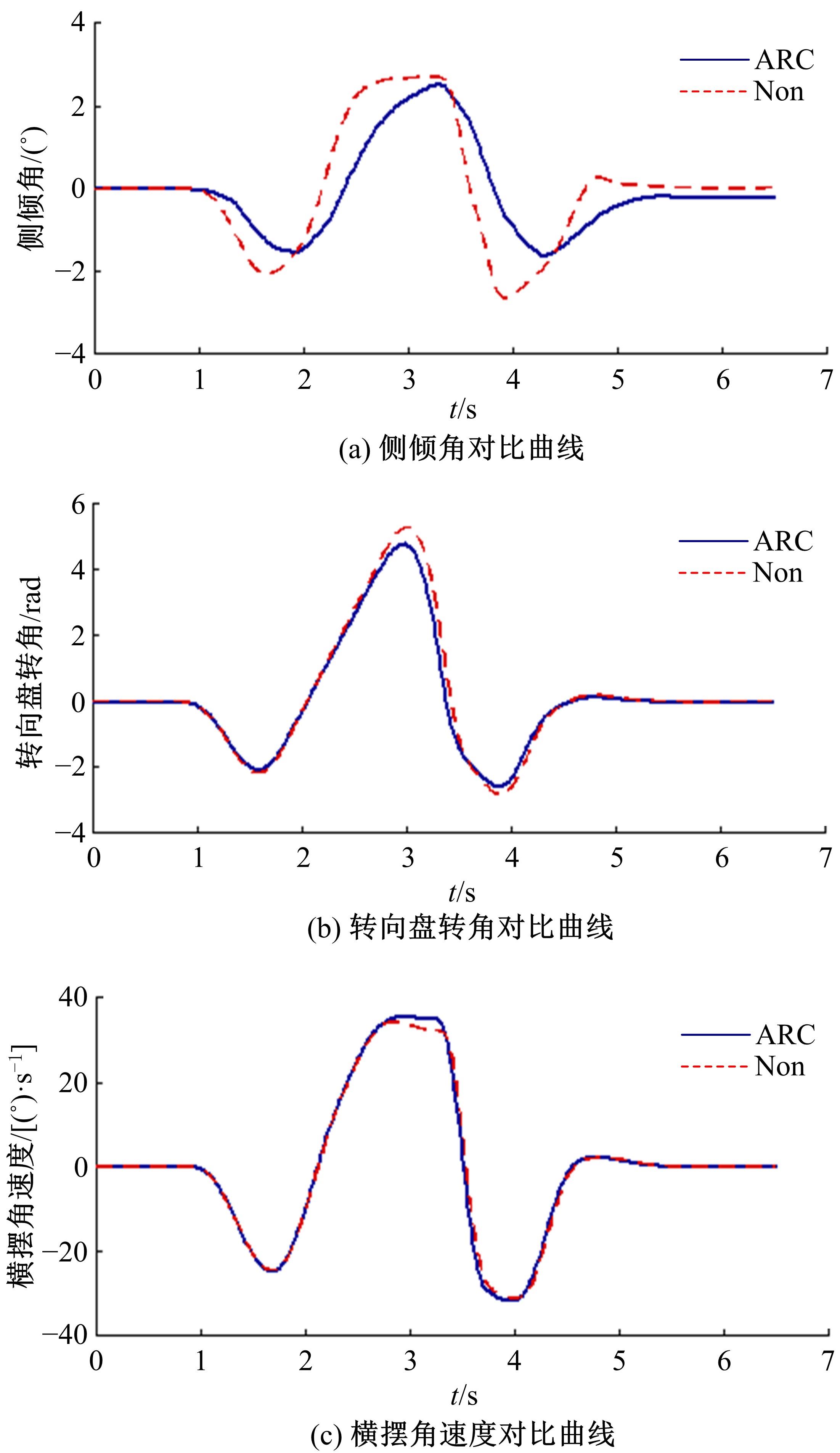
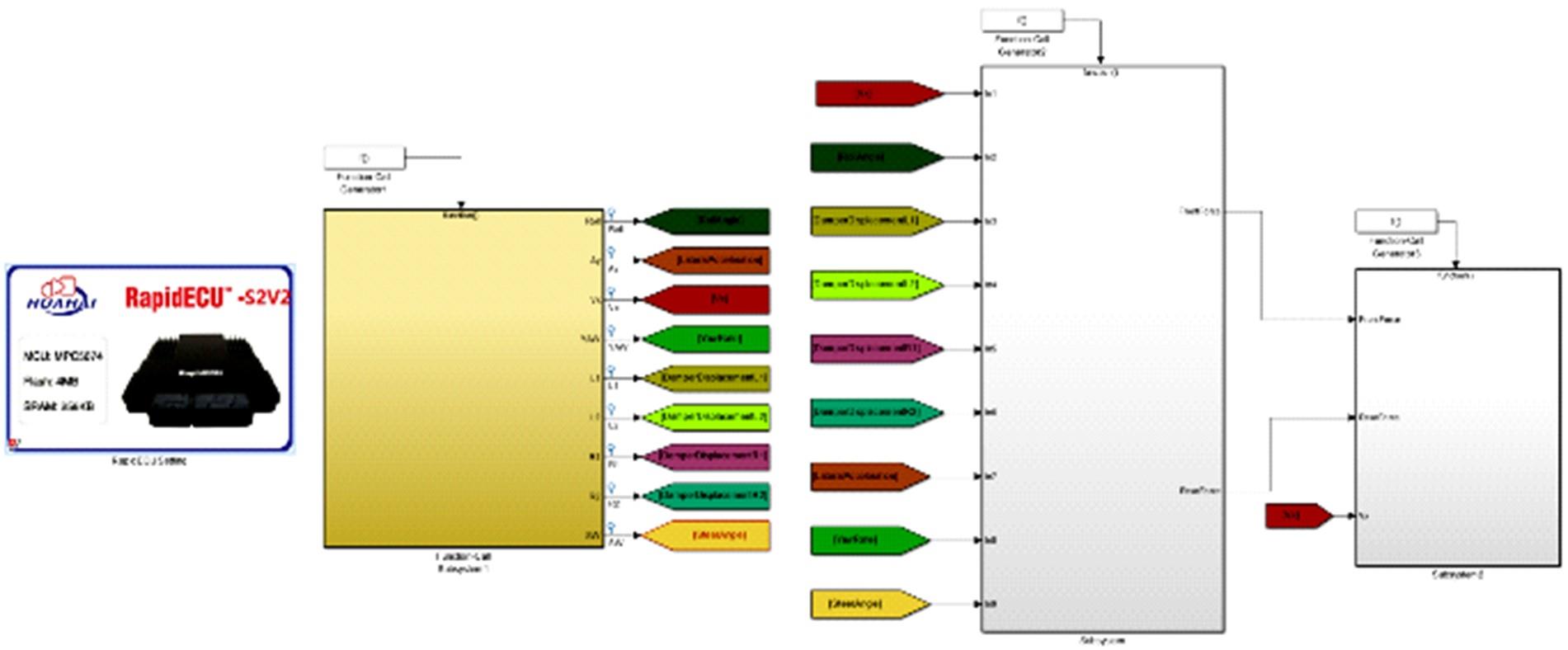
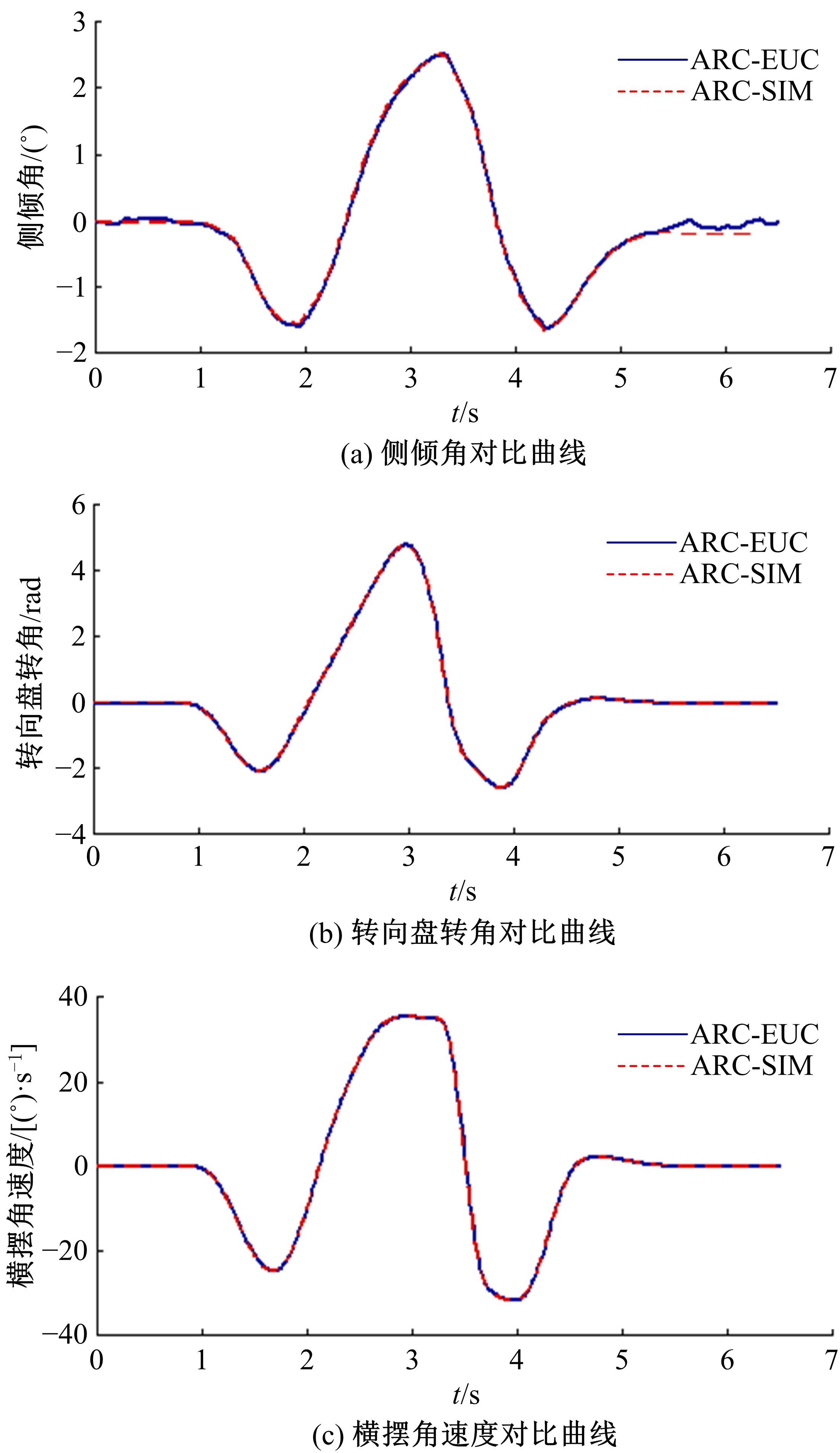
为提高车辆紧急转向时的敏捷性和安全性,提出了一种以主动横向稳定杆系统为执行部件的基于转向意图的车辆敏捷性控制策略。对车辆转向时轮荷转移的侧倾动力学机理进行分析,开发了一种改进的驾驶员转向意图识别方法。根据转向意图和车辆侧倾动力学机理动态分配前后轴上左右车轮载荷,引入稳定性控制方法,进而提升车辆行驶过程中的敏捷性控制策略。搭建Simulink-CarSim整车模型进行仿真验证。仿真结果表明,相对于传统车辆,有主动稳定杆控制的车辆转向盘转角使用量减小约9%,质心侧倾角峰值减小约22%,同时横摆角速度提高4%,使用较小的转向盘转角实现紧急转向控制,提高横摆转向响应,提升车辆的敏捷性和稳定性。最后,搭建ECU在环试验台验证了仿真算法,可为后续的稳定杆样车开发提供参考。
中图分类号:
- U461.6





| 1 | 王伟达, 武燕杰, 史家磊, 等.基于驾驶员意图识别的电子液压制动助力系统控制策略[J].吉林大学学报: 工学版, 2021, 51(2): 406-413. |
| Wang Wei-da, Wu Yan-jie, Shi Jia-lei, et al. Electronic hydraulic brake power system control strategy based on driver intention recognition[J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 406-413. | |
| 2 | Vu V T, Sename O, Dugard L, et al. Enhancing roll stability of heavy vehicle by LQR active anti-roll bar control using electronic servo-valve hydraulic actuators[J]. Vehicle System Dynamics, 2017, 55(9): 1744-5159. |
| 3 | Muniandy V, Samin P, Jamaluddin M. Application of a self-tuning fuzzy PI-PD controller in an active anti-roll bar system for a passenger car[J]. Vehicle System Dynamics, 2015, 53(11): 1641-1666. |
| 4 | Danesin D, Krief P, Sorniotti A, et al. Active roll control to increase handing and comfort[C]//. SAE Technical Paper, 2003-01-0962. |
| 5 | Mizuta Y, Suzumura M, Matsumoto S. Ride comfort enhancement and energy efficiency using electric active stabilizer system[J]. Vehicle System Dynamics, 2010, 48(11): 1305-1323. |
| 6 | Fujii F, Yabumoto H, Koumura S. Ride comfort enhancement using active stabilizer[C]//. SAE Technical Paper, 2018-01-0563. |
| 7 | Cronje P H, Els P S. Improving off-road vehicle handing using an active anti-roll bar[J]. Journal of Terramechanics, 2010, 47: 179-189. |
| 8 | Kim C, Huh K. Active roll control system design with considering actuator constraints for passenger car[J]. Journal of Dynamic Systems, Measurement, and Control, 2019, 141(12): 4044461. |
| 9 | 郭健, 高振海, 管欣, 等.考虑驾驶员紧急转向意图的ESP系统理想橫摆角速度确定方法[J].吉林大学学报: 工学版, 2011, 41(): 74-77. |
| Guo Jian, Gao Zhen-hai, Guan Xin, et al. Method for determining ESP reference yaw rate consideringhe driver's steering desire in extreme situation[J]. Journal of Jilin University(Engineering and Technology Edition), 2011, 41(Sup.2): 74-77. | |
| 10 | 安部正人. 车辆操纵动力学理论与应用[M]. 北京: 机械工业出版社, 2016. |
| 11 | 张琳.分布式驱动电动汽车状态估计与力矩矢量控制研究[D].长春: 吉林大学汽车工程学院, 2019. |
| Zhang Lin. Research on state estimation and torque vector control of distributed drive electric vehicle[D]. Changchun: College of Automotive Engineering, Jilin University, 2019. | |
| 12 | Yang K M, Liu Y H, Na X X, et al. Preview-scheduled steering assistance control for co-piloting vehicle: a human-like methodology[J]. Vehicle System Dynamics, 2020, 58(4): 518-544. |
| [1] | 陈小波,陈玲. 定位噪声统计特性未知的变分贝叶斯协同目标跟踪[J]. 吉林大学学报(工学版), 2023, 53(4): 1030-1039. |
| [2] | 赵睿,李云,胡宏宇,高镇海. 基于V2I通信的交叉口车辆碰撞预警方法[J]. 吉林大学学报(工学版), 2023, 53(4): 1019-1029. |
| [3] | 杨红波,史文库,陈志勇,郭年程,赵燕燕. 基于NSGA⁃II的斜齿轮宏观参数多目标优化[J]. 吉林大学学报(工学版), 2023, 53(4): 1007-1018. |
| [4] | 何科,丁海涛,许男,郭孔辉. 基于摄像头和车道线的增强定位系统[J]. 吉林大学学报(工学版), 2023, 53(3): 663-673. |
| [5] | 朱冰,范天昕,赵健,张培兴,孙宇航. 基于危险边界搜索的自动驾驶系统加速测试方法[J]. 吉林大学学报(工学版), 2023, 53(3): 704-712. |
| [6] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [7] | 张建,刘金波,高原,刘梦可,高振海,杨彬. 基于多模交互的车载传感器定位算法[J]. 吉林大学学报(工学版), 2023, 53(3): 772-780. |
| [8] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [9] | 刘嫣然,孟庆瑜,郭洪艳,李嘉霖. 图注意力模式下融合高精地图的周车轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 792-801. |
| [10] | 田彦涛,许富强,王凯歌,郝子绪. 考虑周车信息的自车期望轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 674-681. |
| [11] | 高松,王玉琼,王玉海,徐艺,周英超,王鹏伟. 智能汽车纵横向整体反馈线性化控制[J]. 吉林大学学报(工学版), 2023, 53(3): 735-745. |
| [12] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [13] | 王登峰,陈宏利,那景新,陈鑫. 单双搭接接头经高温老化后的失效对比[J]. 吉林大学学报(工学版), 2023, 53(2): 346-354. |
| [14] | 张佩,王志伟,杜常清,颜伏伍,卢炽华. 车用质子交换膜燃料电池空气系统过氧比控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 1996-2003. |
| [15] | 隗海林,王泽钊,张家祯,刘洋. 基于Avl-Cruise的燃料电池汽车传动比及能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2119-2129. |
|
||