吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (8): 2185-2192.doi: 10.13229/j.cnki.jdxbgxb.20211137
• 车辆工程·机械工程 • 上一篇
车辆侧倾驱动机构设计与试验
刘平义1( ),李晓婷1,高偌霖1,李海涛1,魏文军1,2,王亚2
),李晓婷1,高偌霖1,李海涛1,魏文军1,2,王亚2
- 1.中国农业大学 工学院,北京 100083
2.河南坐骑科技有限公司,郑州 450016
Design and experiment of tilt-driving mechanism for the vehicle
Ping-yi LIU1(),Xiao-ting LI1,Ruo-lin GAO1,Hai-tao LI1,Wen-jun WEI1,2,Ya WANG2
- 1.College of Engineering,China Agricultural University,Beijing 100083,China
2.Henan AllinRide Technology Co. ,Ltd. ,Zhengzhou 450016,China
摘要:
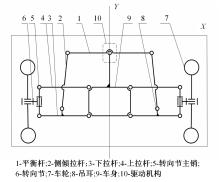
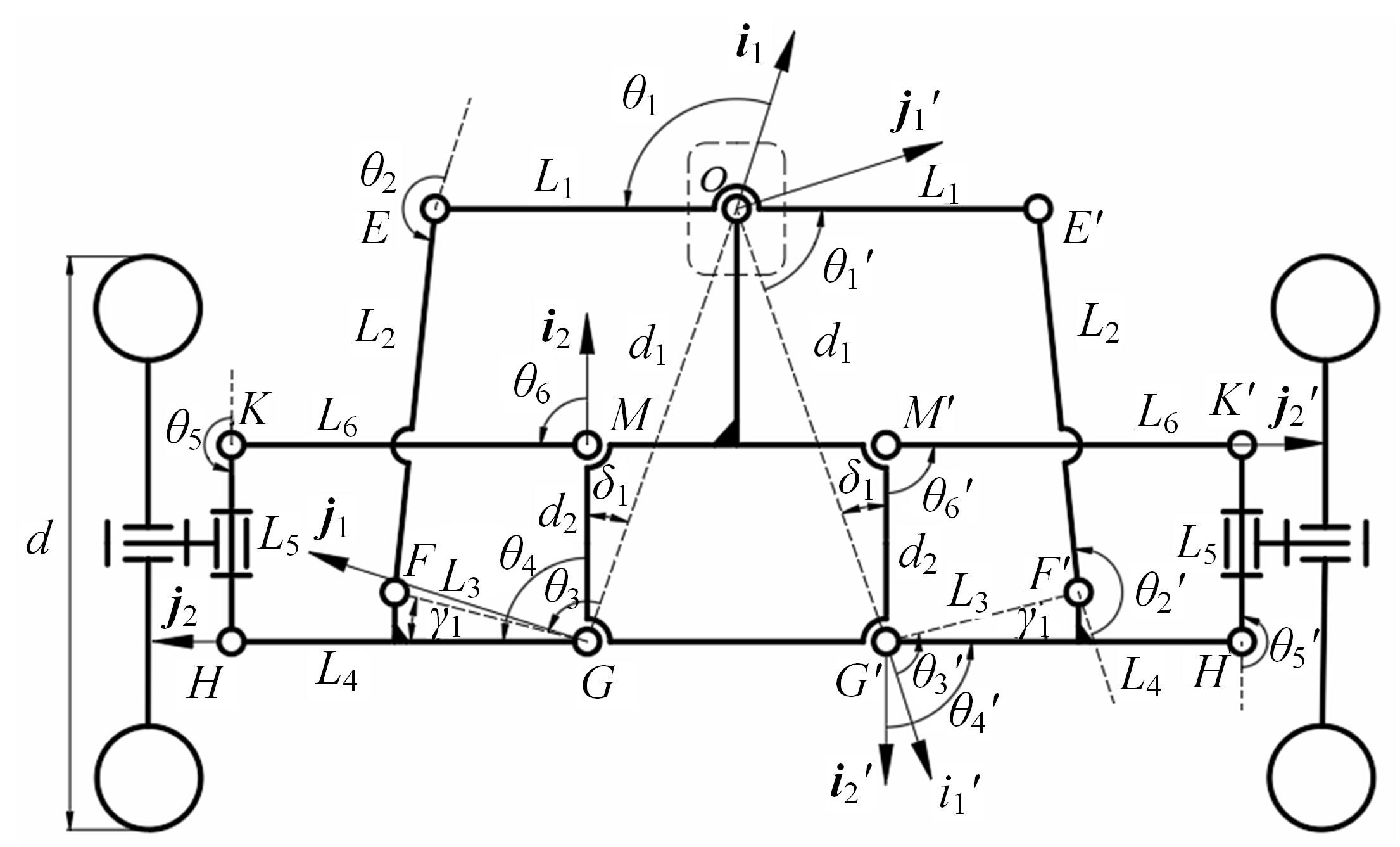
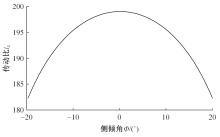
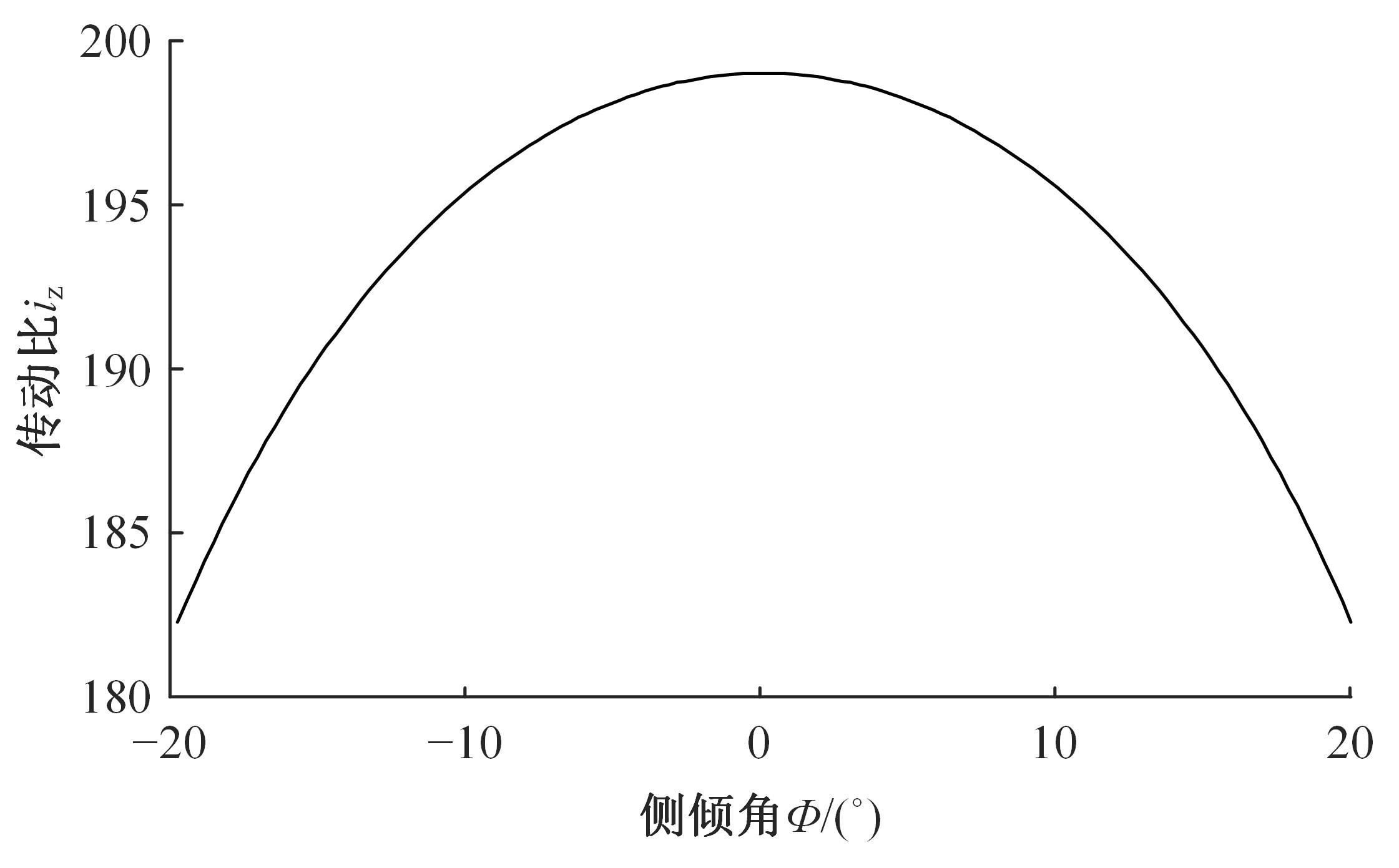
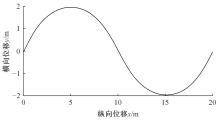
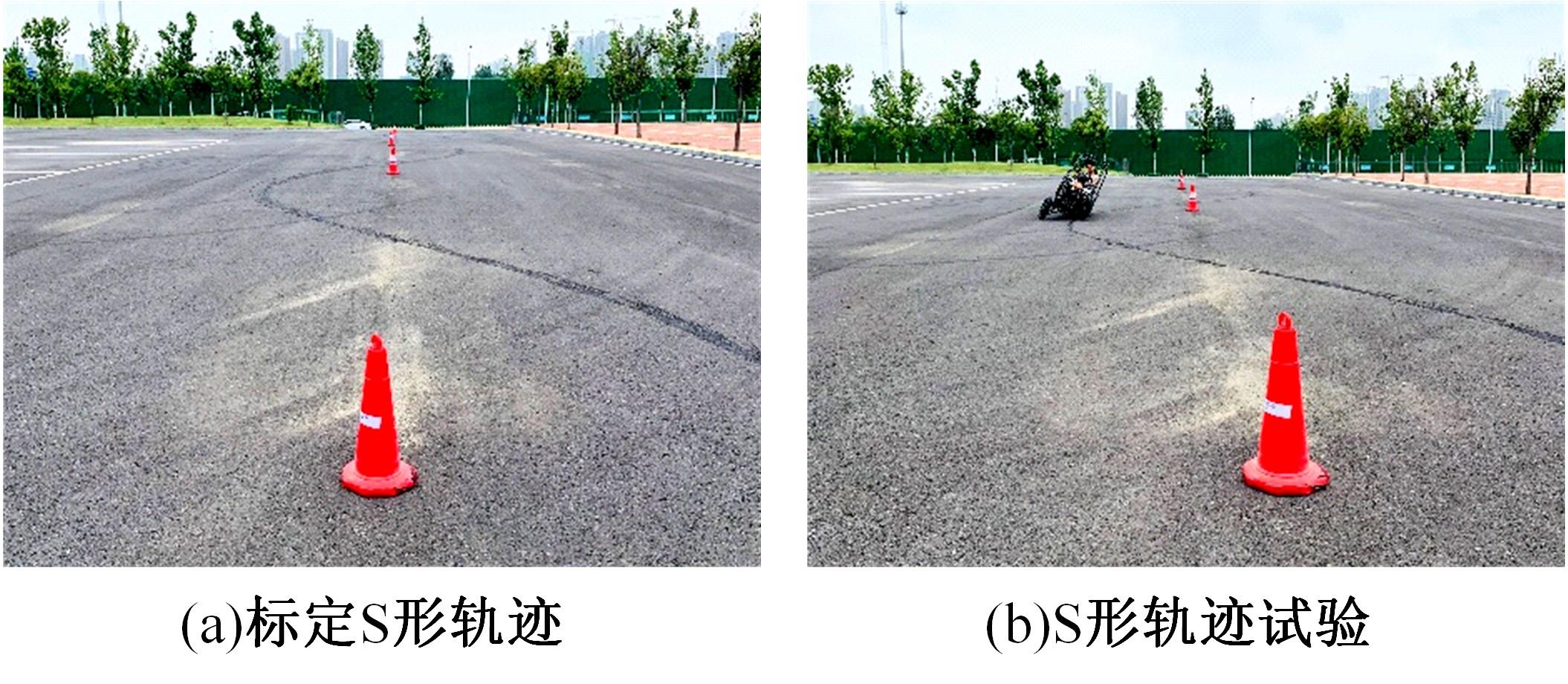
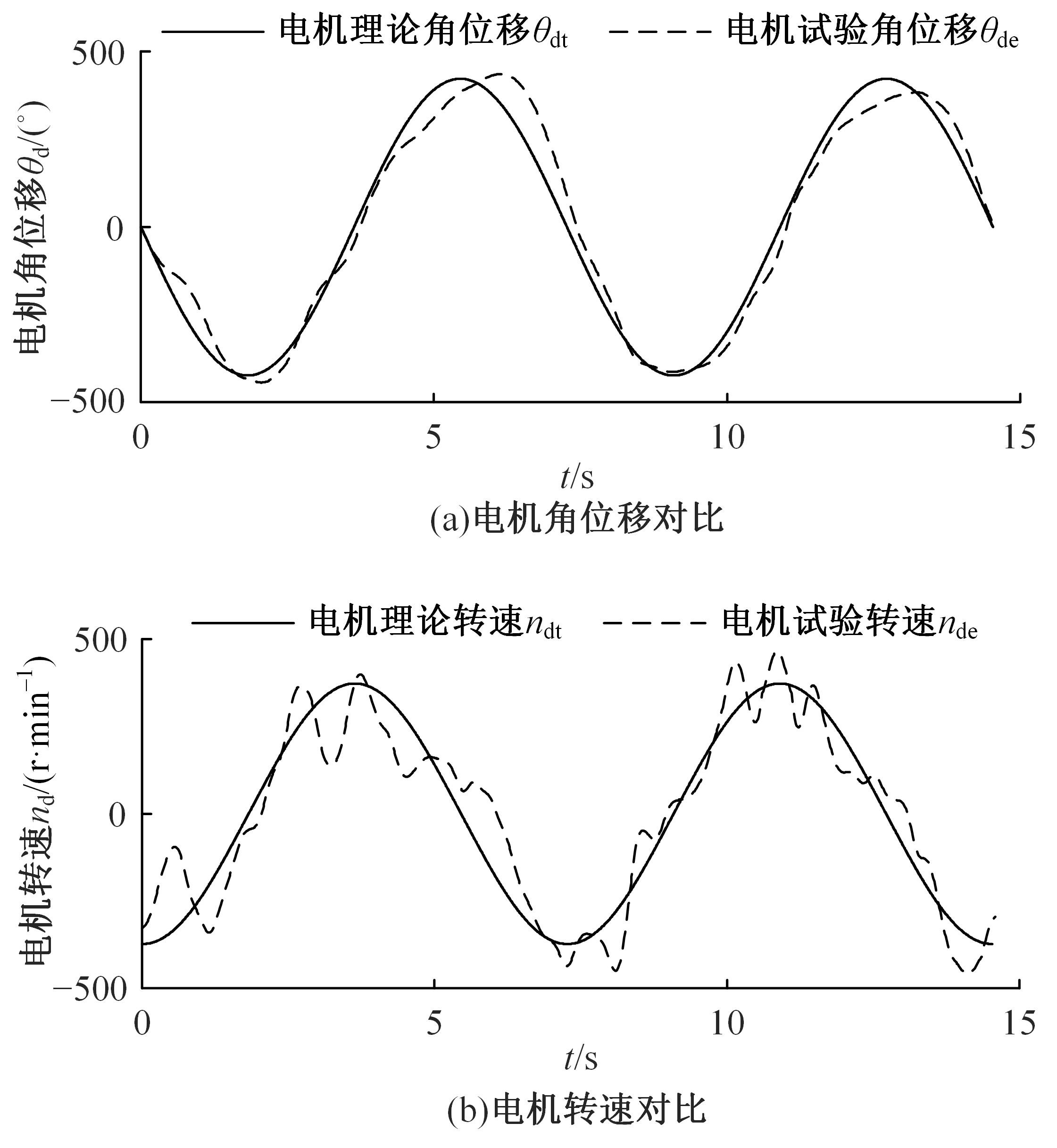
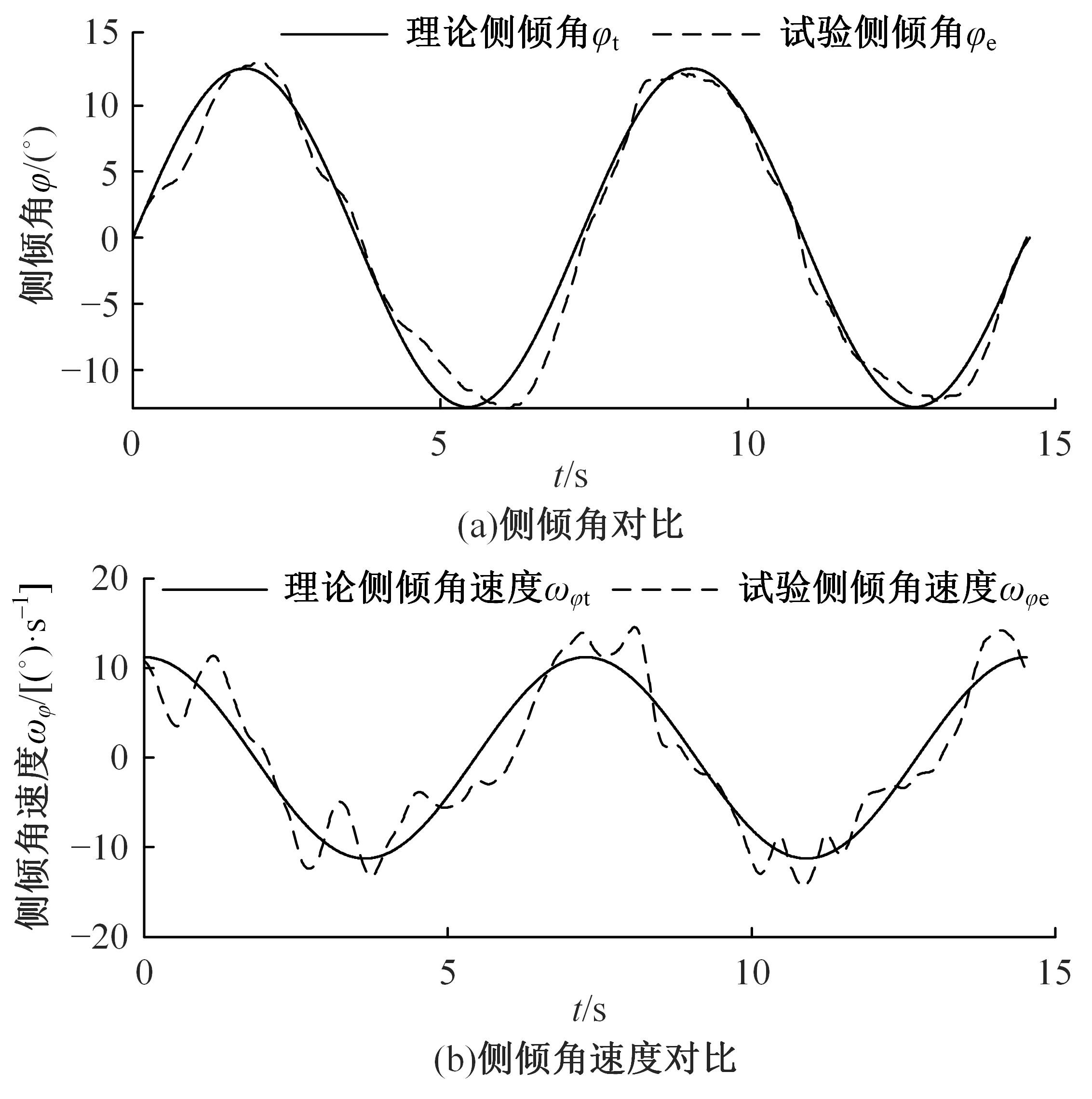
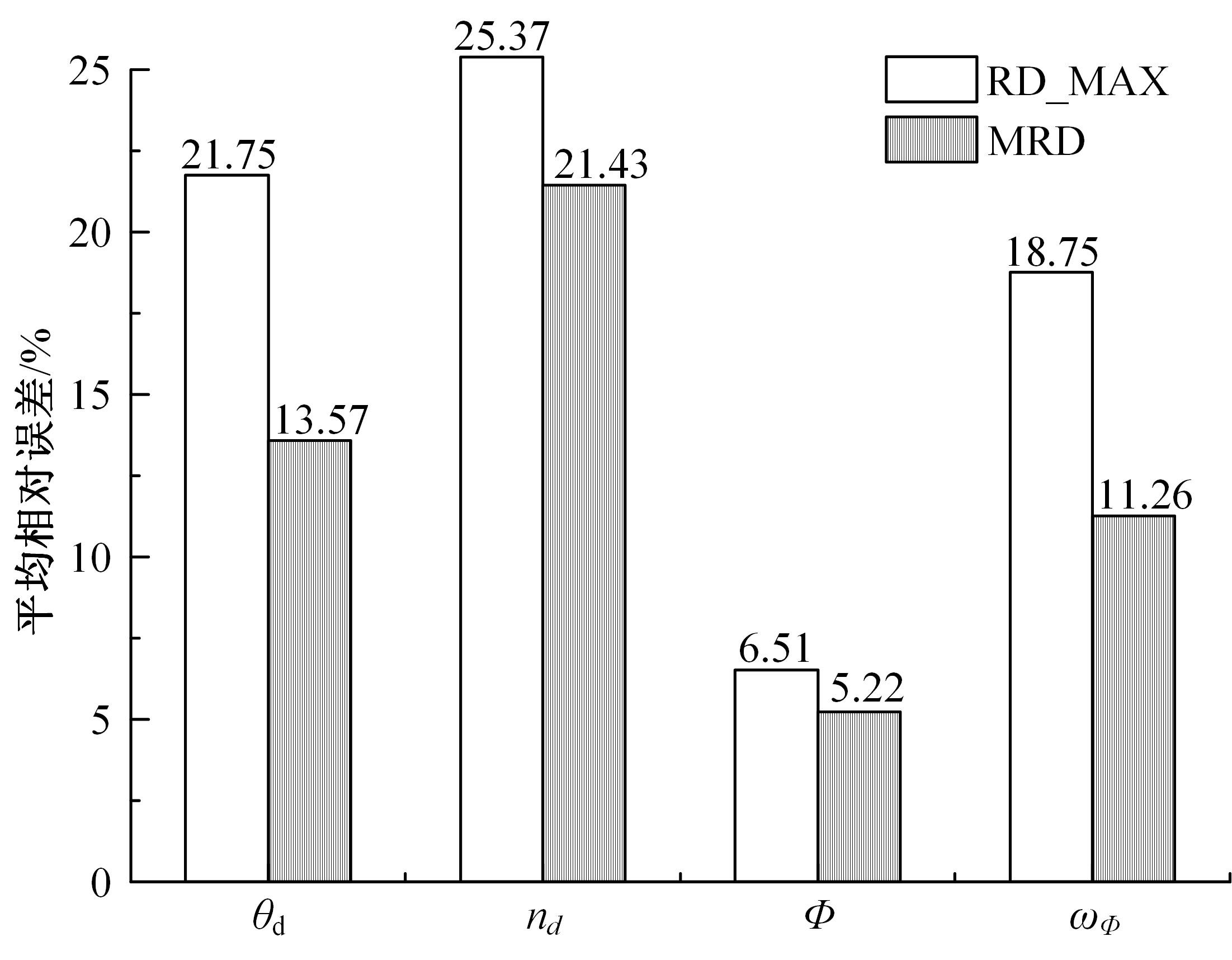
为提高重心较高的车辆弯道行驶稳定性,根据车辆侧倾产生的重力矩与离心力矩平衡避免车辆转弯侧翻的技术方案,设计了一种车辆侧倾驱动机构,采用矢量多边形法建立侧倾驱动机构运动学模型,并分析侧倾驱动与侧倾执行参数之间的关系。研制了应用侧倾驱动机构的主动侧倾倒三轮样车并进行S形轨迹转弯侧倾试验研究,以理论侧倾执行参数为目标参数,求解电机工作的理论值并作为输入条件,对比分析了电机与车辆侧倾参数的理论与试验数据,试验结果表明:试验数据与理论分析数据具有一致性,侧倾角均方根误差为0.89°,能防止车辆转弯侧翻,验证了侧倾驱动机构设计方案可行、运动学分析计算正确及车辆侧倾驱动控制可靠。
中图分类号:
- U463.2


















| 1 | Hall Max. TTW-tilting three wheelers motorized TTWs[DB/OL].[2006-11-04]. |
| 2 | Amati N, Festini A, Pelizza L, et al. Dynamic modelling and experimental validation of three wheeled tilting vehicles[J]. Vehicle System Dynamics, 2011, 49(6): 889-914. |
| 3 | Hibbard R, Karnopp D. Twenty first century transportation system solutions a new type of small, relatively tall and narrow active tilting commuter vehicle[J]. Vehicle System Dynamics, 1996, 25(5): 321-347. |
| 4 | Gohl J, Rajamani R, Alexander L, et al. Active roll mode control implementation on a narrow tilting vehicle[J]. Vehicle System Dynamics, 2004, 42(5): 347-372. |
| 5 | Kidane S, Rajamani R, Alexander L, et al. Development and experimental evaluation of a tilt stability control system for narrow commuter vehicles[J]. IEEE Transactions on Control Systems Technology, 2010, 18(6): 1266-1279. |
| 6 | Wang J, Shen S W. Integrated vehicle ride and roll control via active suspensions[J]. Vehicle System Dynamics, 2008, 46(Sup.1): 495-508. |
| 7 | Robertson J. Active control of narrow tilting vehicle dynamics[D]. Bath:Engineering & Design, University of Bath Faculty, 2014. |
| 8 | Karnopp D. Tilt control for gyro-stabilized two-wheeled vehicles[J]. Vehicle System Dynamics, 2002, 37(2): 145-156. |
| 9 | 伊藤公一, 山崎一平, 门崎司朗, 等. 车身倾斜装置[P]. 日本: CN103124671A. [2013-05-29]. |
| 10 | Tan J T C, Huang Y, Suda Y, et al. Cornering stability improvement by gyro moment for narrow tilting vehicle[J]. Journal of Mechanical Science and Technology, 2015, 29(7): 2705-2711. |
| 11 | Rajamani R, Gohl J, Alexander L, et al. Dynamics of narrow tilting vehicles[J]. Mathematical and Computer Modelling of Dynamical Systems, 2003, 9(2): 209-231. |
| 12 | 刘平义, 柯呈鹏, 高偌霖, 等. 主动侧倾车辆设计与试验[J]. 汽车工程, 2020, 42(11): 1552-1557. |
| Liu Ping-yi, Ke Cheng-peng, Gao Ruo-lin, et al. Design and test of active roll vehicle[J]. Automotive Engineering, 2020, 42(11): 1552-1557. | |
| 13 | 孙桓, 陈作模, 葛文杰. 机械原理[M]. 北京: 高等教育出版社, 2006. |
| 14 | 吴立成, 孔岩萱, 李霞丽. 全转动关节欠驱动手指机构及其运动学分析[J]. 机械工程学报, 2017, 53(1): 47-54. |
| Wu Li-cheng, Kong Yan-xuan, Li Xia-li. Fully rotational joint underactuated finger mechanism and its kinematics analysis[J]. Journal of Mechanical Engineering, 2017, 53(1): 47-54. | |
| 15 | 王亚,魏文军,李海涛. 车辆转向侧倾组合机构及应用该机构的主动侧倾车辆[P]. 中国: CN110509994A. [2019-11-29]. |
| 16 | 余志生. 汽车理论[M].5版.北京:机械工业出版社, 2009. |
| 17 | Piyabongkarn D, Keviczky T, Rajamani R. Active direct tilt control for stability enhancement of a narrow commuter vehicle[J]. International Journal of Automotive Technology, 2004, 5(2): 77-88. |
| 18 | Chiou J C, Chen C L. Modeling and verification of a diamond-shape narrow-tilting vehicle[J]. IEEE/ASME Transactions on Mechatronics, 2009, 13(6): 678-691. |
| [1] | 陈磊,王杨,董志圣,宋亚奇. 一种基于转向意图的车辆敏捷性控制策略[J]. 吉林大学学报(工学版), 2023, 53(5): 1257-1263. |
| [2] | 陈鑫,张冠宸,赵康明,王佳宁,杨立飞,司徒德蓉. 搭接焊缝对铝合金焊接结构轻量化设计的影响[J]. 吉林大学学报(工学版), 2023, 53(5): 1282-1288. |
| [3] | 张勇,毛凤朝,刘水长,王青妤,潘神功,曾广胜. 基于Laplacian算法的汽车外流场畸变网格优化[J]. 吉林大学学报(工学版), 2023, 53(5): 1289-1296. |
| [4] | 汪少华,储堃,施德华,殷春芳,李春. 基于有限时间扩张状态观测的HEV鲁棒复合协调控制[J]. 吉林大学学报(工学版), 2023, 53(5): 1272-1281. |
| [5] | 尹燕莉,黄学江,潘小亮,王利团,詹森,张鑫新. 基于PID与Q⁃Learning的混合动力汽车队列分层控制[J]. 吉林大学学报(工学版), 2023, 53(5): 1481-1489. |
| [6] | 于贵申,陈鑫,武子涛,陈轶雄,张冠宸. AA6061⁃T6铝薄板无针搅拌摩擦点焊接头结构及性能分析[J]. 吉林大学学报(工学版), 2023, 53(5): 1338-1344. |
| [7] | 田彦涛,黄兴,卢辉遒,王凯歌,许富强. 基于注意力与深度交互的周车多模态行为轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(5): 1474-1480. |
| [8] | 杨红波,史文库,陈志勇,郭年程,赵燕燕. 基于NSGA⁃II的斜齿轮宏观参数多目标优化[J]. 吉林大学学报(工学版), 2023, 53(4): 1007-1018. |
| [9] | 赵睿,李云,胡宏宇,高镇海. 基于V2I通信的交叉口车辆碰撞预警方法[J]. 吉林大学学报(工学版), 2023, 53(4): 1019-1029. |
| [10] | 陈小波,陈玲. 定位噪声统计特性未知的变分贝叶斯协同目标跟踪[J]. 吉林大学学报(工学版), 2023, 53(4): 1030-1039. |
| [11] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [12] | 张建,刘金波,高原,刘梦可,高振海,杨彬. 基于多模交互的车载传感器定位算法[J]. 吉林大学学报(工学版), 2023, 53(3): 772-780. |
| [13] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [14] | 刘嫣然,孟庆瑜,郭洪艳,李嘉霖. 图注意力模式下融合高精地图的周车轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 792-801. |
| [15] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
|
||