吉林大学学报(工学版) ›› 2018, Vol. 48 ›› Issue (6): 1820-1826.doi: 10.13229/j.cnki.jdxbgxb20170813
核电水池推力附着机器人系统设计
李战东1( ),陶建国1(),罗阳1,孙浩2,丁亮1,邓宗全1
),陶建国1(),罗阳1,孙浩2,丁亮1,邓宗全1
- 1. 哈尔滨工业大学 机电工程学院,哈尔滨 150080
2. 福州大学 机械工程及自动化学院,福州 350001
Design of thrust attachment underwater robot system in nuclear power station pool
LI Zhan-dong1(),TAO Jian-guo1(),LUO Yang1,SUN Hao2,DING Liang1,DENG Zong-quan1
- 1. School of Mechanical and Electrical Engineering, Harbin Institute of Technology, Harbin 150080, China
2. School of Mechanical Engineering and Automation, Fuzhou University, Fuzhou 350001, China
摘要:
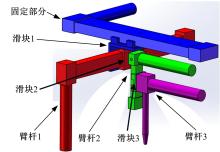
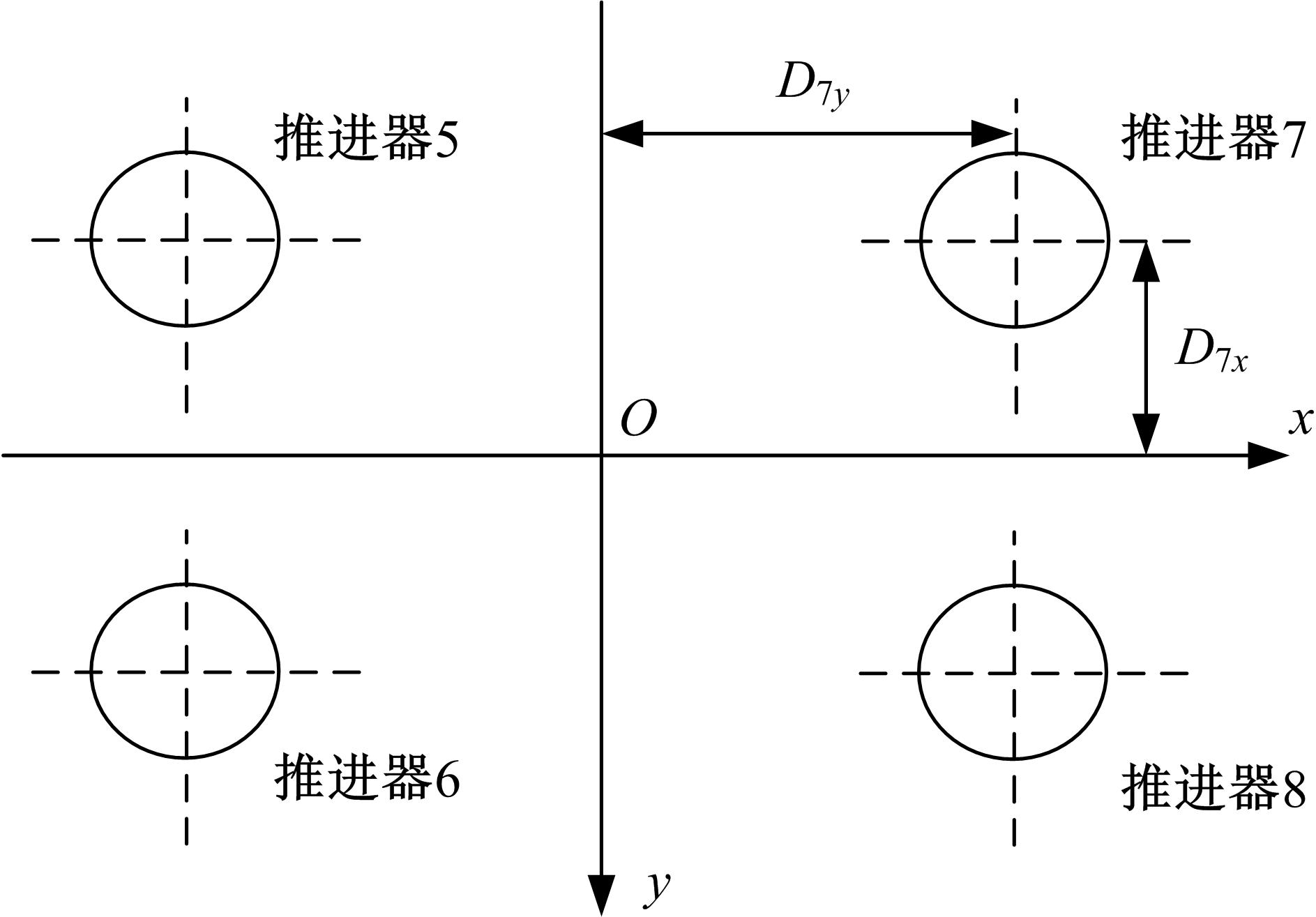
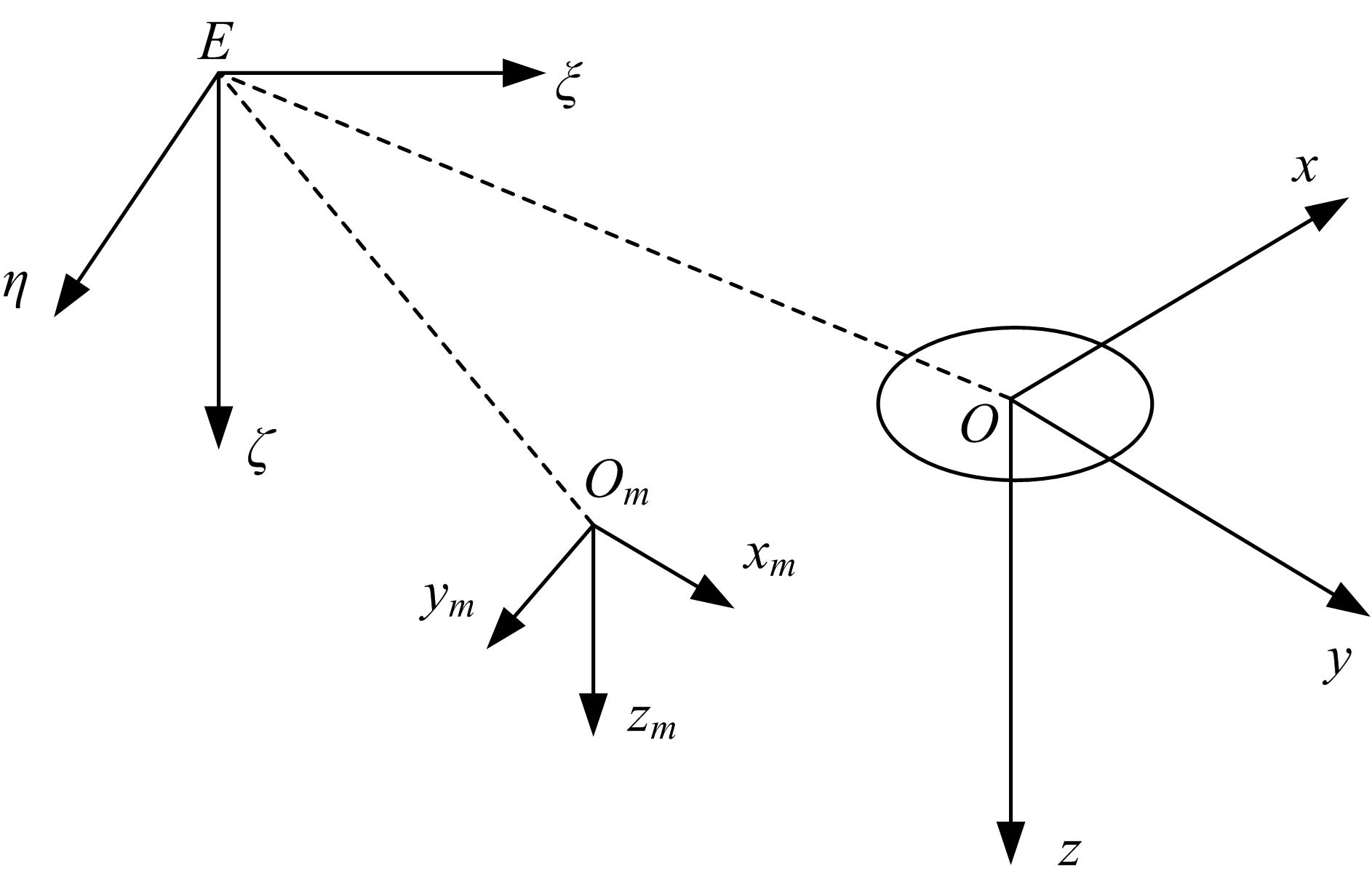
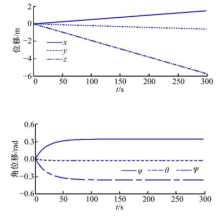
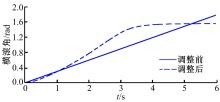
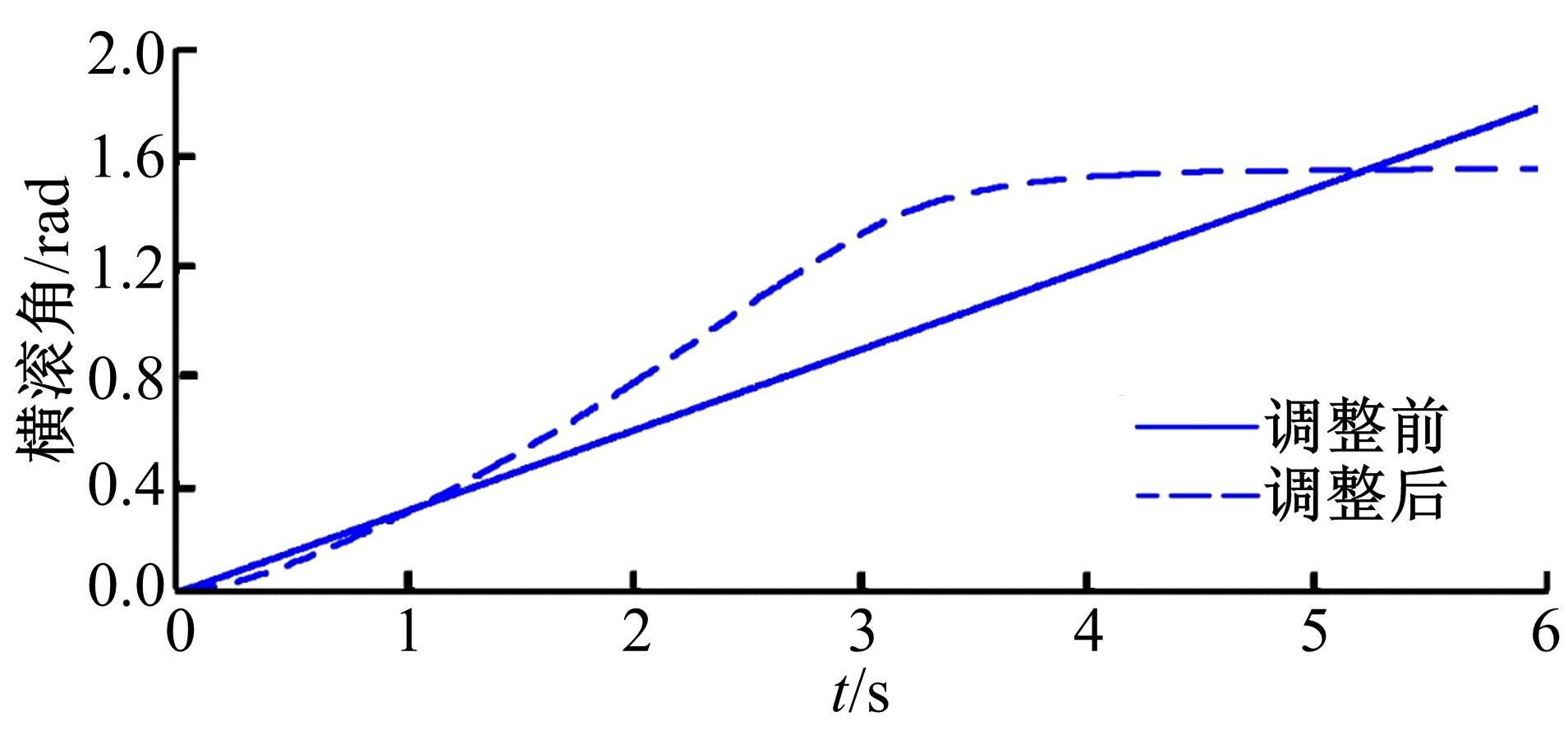
为了实现机器人对核电站水池的应急焊接修复作业和日常巡查工作,本文针对池底、池壁存在凹凸和管道等障碍的复杂环境,提出了一种具备水下全方位运动功能,并能通过推进器推力实现附着定位的有缆型水下机器人系统。分析了机器人作业装置与机器人本体配合运动时,重心、浮心和转动惯量的变化情况,建立了机器人的动力学模型;通过在Matlab/Simulink环境下仿真计算,对比分析了无推力输入时机器人重心、浮心位置调节前、后机器人位姿随时间变化情况,以及调节重心、浮心位置对于机器人翻转效率的影响。计算结果表明,通过调节重心与浮心位置,可以增强无推力输入时机器人姿态稳定性,并有效提高机器人翻转运动的效率,为实现机器人的精确控制打下良好基础。
中图分类号:
- TP242.6






| [1] |
Ongena R, Ogawa Y . Nuclear power:status report and future prospects[J]. Energy Policy, 2016,96:770-778.
doi: 10.1016/j.enpol.2016.05.037 |
| [2] |
Avila J P J, Donha D C, Adamowski J C . Experimental and model identification open-frame underwear vehicle[J]. Ocean Engineering, 2013,60(2):81-94.
doi: 10.1016/j.oceaneng.2012.10.007 |
| [3] | Aras M, Shairieel M, Ab A F, et al. A low cost 4 DOF remotely operated underwater vehicle integrated with IMU and pressure sensor [C]//4th International Conference on Underwater System Technology: Theory and Application, Shah Alam, 2012: 18-23. |
| [4] | Mu L J, Sardinha C, Chen C Y, et al. Remotely operated vehicle system implementation in open-water [C]//Proceedings of the 2nd International Conference on Intelligent Technologies and Engineering Systems, New York, 2014: 553-560. |
| [5] | Yang R, Clement B, Mansour A, et al. Modeling of a complex-shape underwater vehicle [C]//2014 IEEE International Conference on Autonomous Robot Systems and Competitions, Espinho, 2014: 36-41. |
| [6] |
Heale T, Larkum T . ARM and rovsim: extending our reach[J]. Industrial Robot: an International Journal, 1999,26(3):202-208.
doi: 10.1108/01439919910266866 |
| [7] | 俞强 . 水下磁吸附式轮履焊接水下机器人原理样机研究[D]. 南昌:南昌大学机电工程学院, 2007. |
| Yu Qiang . A study on magnetic attracting underwater wheel-tracked welding robot systems prototype [D]. Nanchang: School of Mechanical and Electronic Engineering, Nanchang University, 2007. | |
| [8] | 衣瑞文, 张宝军, 吴超 , 等. 堆内构件检测ROV设计与实现[J]. 海洋工程, 2011,29(4):125-129. |
| Yi Rui-wen, Zhang Bao-jun, Wu Chao , et al. Design and implementation of ROV for detecting components in the reactor[J]. Ocean Engineering, 2011,29(4):125-129. | |
| [9] |
Wang D, Gauld I C, Yoder G L , et al. Study of Fukushima Daiichi nuclear power station unit 4 spent-fuel pool[J]. Nuclear Technology, 2012,180(2):205-215.
doi: 10.13182/NT12-A14634 |
| [10] | 惠嘉 . 温度对聚四氟乙烯材料特性的影响研究[J]. 火工品, 2006(1):46-48. |
| Hui Jia . Effect of temperature on the properties of Teflon[J]. Initiators & Pyrotechnics, 2006(1):46-48. | |
| [11] |
Peng J F, Qiu J Y, Ni J F , et al. Radiation synjournal and characteristics of PTFE-g-PSSA ion exchange membrane applied in vanadium redox battery[J]. Nuclear Science and Techniques, 2007,18(1):50-54.
doi: 10.1016/S1001-8042(07)60018-9 |
| [12] |
韩仲武, 栾伟玲, 韩延龙 , 等. 钨、镍组合及钨镍合金的辐射屏蔽性能模拟[J]. 核技术, 2015,38(1):23-28.
doi: 10.11889/j.0253-3219.2015.hjs.38.010204 |
|
Han Zhong-wu, Luan Wei-ling, Han Yan-long , et al. Simulation of radiation shielding properties of composition of tungsten, nickel and tungsten nickel alloy[J]. Nuclear Technology, 2015,38(1):23-28.
doi: 10.11889/j.0253-3219.2015.hjs.38.010204 |
|
| [13] | Fossen T I . Guidance and Control of Ocean Vehicles[M]. New York: Wiley New York, 1994. |
| [1] | 于树友,谭雷,王伍洋,陈虹. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报(工学版), 2019, 49(3): 934-942. |
| [2] | 温海营,任翔,徐卫良,丛明,秦文龙,胡书海. 咀嚼机器人颞下颌关节仿生设计及试验测试[J]. 吉林大学学报(工学版), 2019, 49(3): 943-952. |
| [3] | 顾万里,王萍,胡云峰,蔡硕,陈虹. 具有H∞性能的轮式移动机器人非线性控制器设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1811-1819. |
| [4] | 赵爽,沈继红,张刘,赵晗,陈柯帆. 微细电火花加工表面粗糙度快速高斯评定[J]. 吉林大学学报(工学版), 2018, 48(6): 1838-1843. |
| [5] | 王德军, 魏薇郦, 鲍亚新. 考虑侧风干扰的电子稳定控制系统执行器故障诊断[J]. 吉林大学学报(工学版), 2018, 48(5): 1548-1555. |
| [6] | 闫冬梅, 钟辉, 任丽莉, 王若琳, 李红梅. 具有区间时变时滞的线性系统稳定性分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1556-1562. |
| [7] | 胡满江, 罗禹贡, 陈龙, 李克强. 基于纵向频响特性的整车质量估计[J]. 吉林大学学报(工学版), 2018, 48(4): 977-983. |
| [8] | 刘祥勇, 李万莉. 包含蓄能器的电液比例控制模型[J]. 吉林大学学报(工学版), 2018, 48(4): 1072-1084. |
| [9] | 张茹斌, 占礼葵, 彭伟, 孙少明, 刘骏富, 任雷. 心肺功能评估训练系统的恒功率控制[J]. 吉林大学学报(工学版), 2018, 48(4): 1184-1190. |
| [10] | 董惠娟, 于震, 樊继壮. 基于激光测振仪的非轴对称超声驻波声场的识别[J]. 吉林大学学报(工学版), 2018, 48(4): 1191-1198. |
| [11] | 田彦涛, 张宇, 王晓玉, 陈华. 基于平方根无迹卡尔曼滤波算法的电动汽车质心侧偏角估计[J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
| [12] | 张士涛, 张葆, 李贤涛, 王正玺, 田大鹏. 基于零相差轨迹控制方法提升快速反射镜性能[J]. 吉林大学学报(工学版), 2018, 48(3): 853-858. |
| [13] | 王林, 王洪光, 宋屹峰, 潘新安, 张宏志. 输电线路悬垂绝缘子清扫机器人行为规划[J]. 吉林大学学报(工学版), 2018, 48(2): 518-525. |
| [14] | 胡云峰, 王长勇, 于树友, 孙鹏远, 陈虹. 缸内直喷汽油机共轨系统结构参数优化[J]. 吉林大学学报(工学版), 2018, 48(1): 236-244. |
| [15] | 朱枫, 张葆, 李贤涛, 王正玺, 张士涛. 基于强跟踪卡尔曼滤波的陀螺信号处理[J]. 吉林大学学报(工学版), 2017, 47(6): 1868-1875. |
|