吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (4): 1107-1113.doi: 10.13229/j.cnki.jdxbgxb20180189
• • 上一篇
电动两轮车风险驾驶行为及事故影响因素分析
江亮1,2( ),贺宜1,2()
),贺宜1,2()
- 1. 武汉理工大学 智能交通系统研究中心,武汉 430063
2. 武汉理工大学 水路公路交通安全控制与装备教育部工程研究中心,武汉 430063
Risky driving behavior and influencing factors analysis for electric two⁃wheeler
Liang JIANG1,2(),Yi HE1,2()
- 1. Intelligent Transportation Systems Research Center, Wuhan University of Technology, Wuhan 430063, China
2. Engineering Research Center for Transportation Safety, Ministry of Education, Wuhan University of Technology, Wuhan 430063, China
摘要:
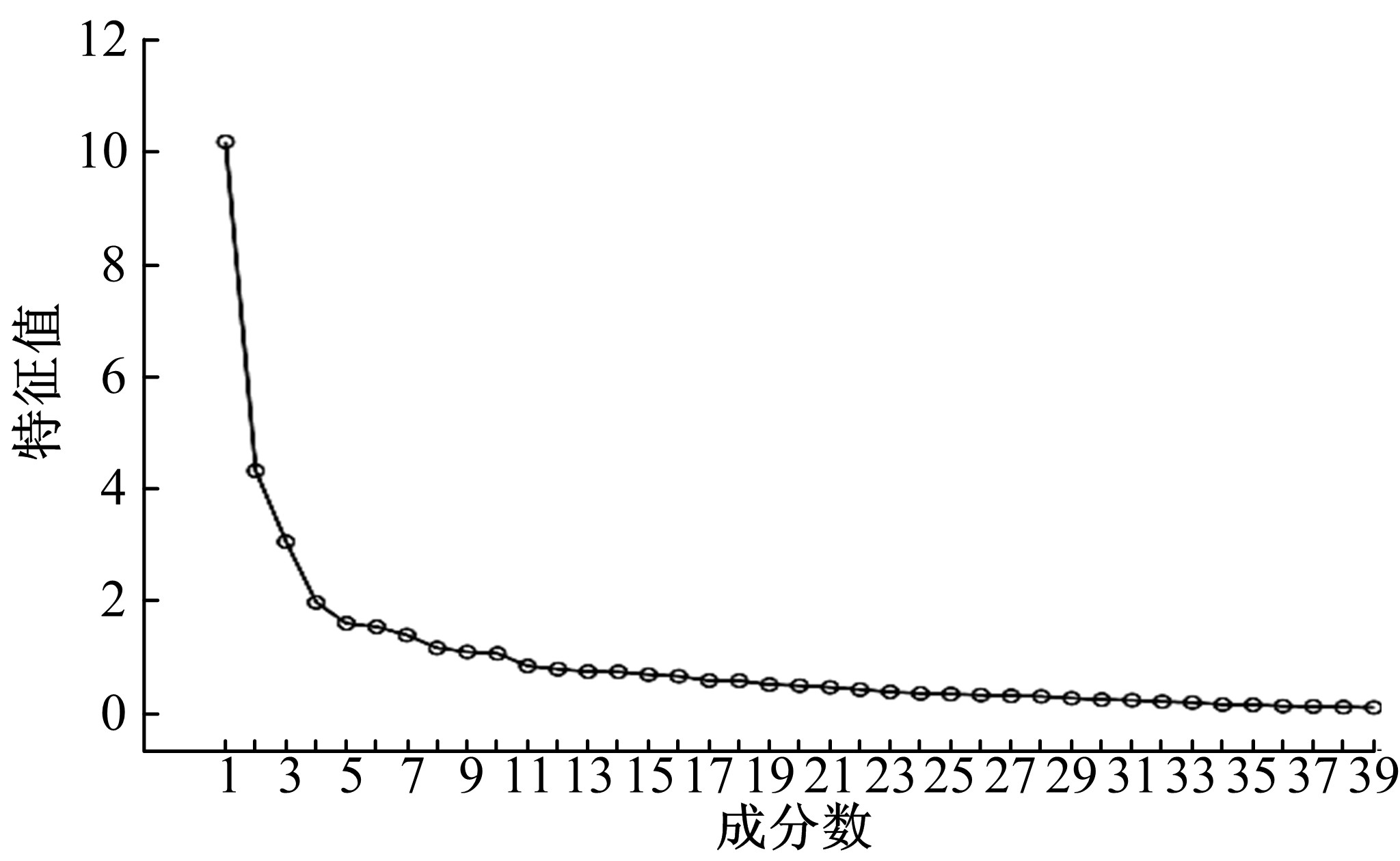
为探究电动两轮车风险驾驶行为产生的原因及其影响因素,通过问卷调查方式对183位电动两轮车骑行者进行问卷调查,经过探索性因素分析(EFA)得到了包括风险驾驶行为、情绪状态、利他主义、风险感知能力、驾驶自信和冒险意识的6因子结构模型。研究了统计学信息、6因子与交通事故之间的相互关系,构建了基于Logistic回归的交通事故预测模型,利用验证性因素分析(CFA)对该模型进行了验证。研究表明:日均里程、风险驾驶行为、工作时长、冒险意识是影响交通事故的重要参数。
中图分类号:
- U121

| 1 | 全球电动车网. 2016年电动三轮产业发展大数据[EB/OL]. [2017⁃02⁃13]. http:∥. |
| 2 | YuS, YangZ, YuB. Air express network design based on express path choices–Chinese case study[J]. Journal of Air Transport Management, 2017, 61: 73⁃80. |
| 3 | 高继东, 曾必强, 彭伟. 电动自行车与轿车碰撞中骑车人的伤害特征[J]. 吉林大学学报: 工学版, 2016, 46(6): 1786⁃1791. |
| GaoJi⁃dong, ZengBi⁃qiang, PengWei. Cyclist injury in collision between car and electric bicycle[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(6): 1786⁃1791. | |
| 4 | 刘东, 韩凤春, 陈永胜. 灯控路口非机动车交通流运行特性研究[J]. 中国人民公安大学学报: 自然科学版 2004, 10(2): 89⁃92. |
| LiuDong, HanFeng⁃chun, ChenYong⁃sheng. Study on traffic flow characteristics of non⁃motorized vehicle at light control intersection[J]. Journal of Chinese People’s Public Security University(Science and Technology), 2004, 10(2): 89⁃92. | |
| 5 | XuJ, ChenL, WangD, et al. The backbone transportation network optimization problem of air express based on scale economies[J]. Advances in Transportation Studies, 2016, 3:61⁃74. |
| 6 | WaltonD, BuchananJ. Motorcycle and scooter speeds approaching urban intersections[J]. Accident Analysis and Prevention, 2012, 48: 335⁃340. |
| 7 | 北京青年报. 去年北京电动二轮车共发生交通事故31404起[EB/OL]. [2016⁃04⁃05]. http:∥news.sohu.com/20160405/n443301797.shtml. |
| 8 | 重庆日报. 重庆电动两轮车使用管理的调查该当如何管住?[EB/OL]. [2017⁃06⁃30]. http:∥cq.qq.com/a/20170630/015918. |
| htm. | |
| 9 | ReasonJ, MansteadA, StranlingS, et al. Errors and violations on the roads: a real distinction?[J]. Ergonomics, 1990, 33(10/11): 1315⁃1332. |
| 10 | AbergL, RimmoP A. Dimensions of aberrant driver behavior[J]. Ergonomics, 1998, 41(1): 39⁃56. |
| 11 | XieCheng⁃qiu, ParkerD. A social psychological approach to driving violations in two Chinese cities[J]. Transportation Research Part F: Psychology and Behaviour, 2002, 5(4): 293⁃308. |
| 12 | 白云,石京. 北京市驾驶行为与影响因素分析[J]. 交通信息与安全, 2010, 28(2): 114⁃119. |
| BaiYun, ShiJing. Driving behavior and influential factors study in Beijing[J]. Journal of Transportation Information and Safety, 2010, 28(2): 114⁃119. | |
| 13 | 刘霞. 驾驶人驾龄与交通事故相关性研究[D]. 西安:长安大学汽车学院, 2016. |
| LiuXia. Study on correlation between driving experience and traffic accidents[D]. Xi’an: School of Automobile, Chang'an University, 2016. | |
| 14 | TsengC M. Social⁃demographics, driving experience and yearly driving distance in relation to a tour bus driver's at⁃fault accident risk[J]. Tourism Management, 2012, 33(4): 910⁃915. |
| 15 | NohK H, RahC K, YoonY S, et al. Experimental approach to developing human driver models considering driver’s human factors[J]. International Journal of Automotive Technology, 2014, 15(4): 655⁃666. |
| 16 | LiXiao⁃ping, XieLi⁃juan, XuLan. Research on classification and restruction of express service quality elements based on Kano model[C]∥The 13th International Conference on Service Systems and Service Management (ICSSSM), Kunming, China,2016: 1⁃6. |
| 17 | MuhammadAlam,JoaquimFerreira,JoséFonseca. Intelligent Transportation Systems: Dependable Vehicular Communications for Improved Road Safety[M]. Berlin: Springer, 2016. |
| [1] | 吴文静,陈润超,贾洪飞,罗清玉,孙迪. 车路协同环境下路段掉头区域车辆协同控制[J]. 吉林大学学报(工学版), 2019, 49(4): 1100-1106. |
| [2] | 曲昭伟,潘昭天,陈永恒,陶鹏飞,孙迪. 基于最优速度模型的改进安全距离跟驰模型[J]. 吉林大学学报(工学版), 2019, 49(4): 1092-1099. |
| [3] | 白乔文,曲昭伟,陈永恒,熊帅,陶楚青. 非严格优先权下无左转专用相位直行车辆轨迹模型建立[J]. 吉林大学学报(工学版), 2019, 49(3): 673-679. |
| [4] | 李志慧,钟涛,赵永华,胡永利,李海涛,赵景伟. 面向车辆自主驾驶的行人跟踪算法[J]. 吉林大学学报(工学版), 2019, 49(3): 680-687. |
| [5] | 曹宁博,赵利英,曲昭伟,陈永恒,白乔文,邓晓磊. 考虑双向行人跟随行为的社会力模型[J]. 吉林大学学报(工学版), 2019, 49(3): 688-694. |
| [6] | 罗小芹,王殿海,金盛. 面向混合交通的感应式交通信号控制方法[J]. 吉林大学学报(工学版), 2019, 49(3): 695-704. |
| [7] | 陈磊,王江锋,谷远利,闫学东. 基于思维进化优化的多源交通数据融合算法[J]. 吉林大学学报(工学版), 2019, 49(3): 705-713. |
| [8] | 凃强,程琳,林芬,孙超. 考虑出行者风险态度的最优路径搜索[J]. 吉林大学学报(工学版), 2019, 49(3): 720-726. |
| [9] | 尹超英,邵春福,王晓全. 考虑停车可用性的建成环境对小汽车通勤出行的影响[J]. 吉林大学学报(工学版), 2019, 49(3): 714-719. |
| [10] | 陈永恒,刘芳宏,曹宁博. 信控交叉口行人与提前右转机动车冲突影响因素[J]. 吉林大学学报(工学版), 2018, 48(6): 1669-1676. |
| [11] | 常山,宋瑞,何世伟,黎浩东,殷玮川. 共享单车故障车辆回收模型[J]. 吉林大学学报(工学版), 2018, 48(6): 1677-1684. |
| [12] | 曲大义,杨晶茹,邴其春,王五林,周警春. 基于干线车流排队特性的相位差优化模型[J]. 吉林大学学报(工学版), 2018, 48(6): 1685-1693. |
| [13] | 刘兆惠, 王超, 吕文红, 管欣. 基于非线性动力学分析的车辆运行状态参数数据特征辨识[J]. 吉林大学学报(工学版), 2018, 48(5): 1405-1410. |
| [14] | 宗芳, 齐厚成, 唐明, 吕建宇, 于萍. 基于GPS数据的日出行模式-出行目的识别[J]. 吉林大学学报(工学版), 2018, 48(5): 1374-1379. |
| [15] | 刘翔宇, 杨庆芳, 隗海林. 基于随机游走算法的交通诱导小区划分方法[J]. 吉林大学学报(工学版), 2018, 48(5): 1380-1386. |
|
||