吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (12): 2816-2826.doi: 10.13229/j.cnki.jdxbgxb20211448
基于集合卡尔曼滤波的高机动救援车辆主动悬挂控制方法
李文航1( ),倪涛2,赵丁选2(),张泮虹2,师小波2
),倪涛2,赵丁选2(),张泮虹2,师小波2
- 1.吉林大学 机械与航空航天工程学院,长春 130022
2.燕山大学 车辆与能源学院,河北 秦皇岛 066004
Active suspension control method of high mobility rescue vehicle based on ensemble Kalman filter
Wen-hang LI1(),Tao NI2,Ding-xuan ZHAO2(),Pan-hong ZHANG2,Xiao-bo SHI2
- 1.College of Mechanical and Aerospace Engineering,Jilin University,Changchun 130022,China
2.School of Vehicle and Energy,Yanshan University,Qinhuangdao 066004,China
摘要:
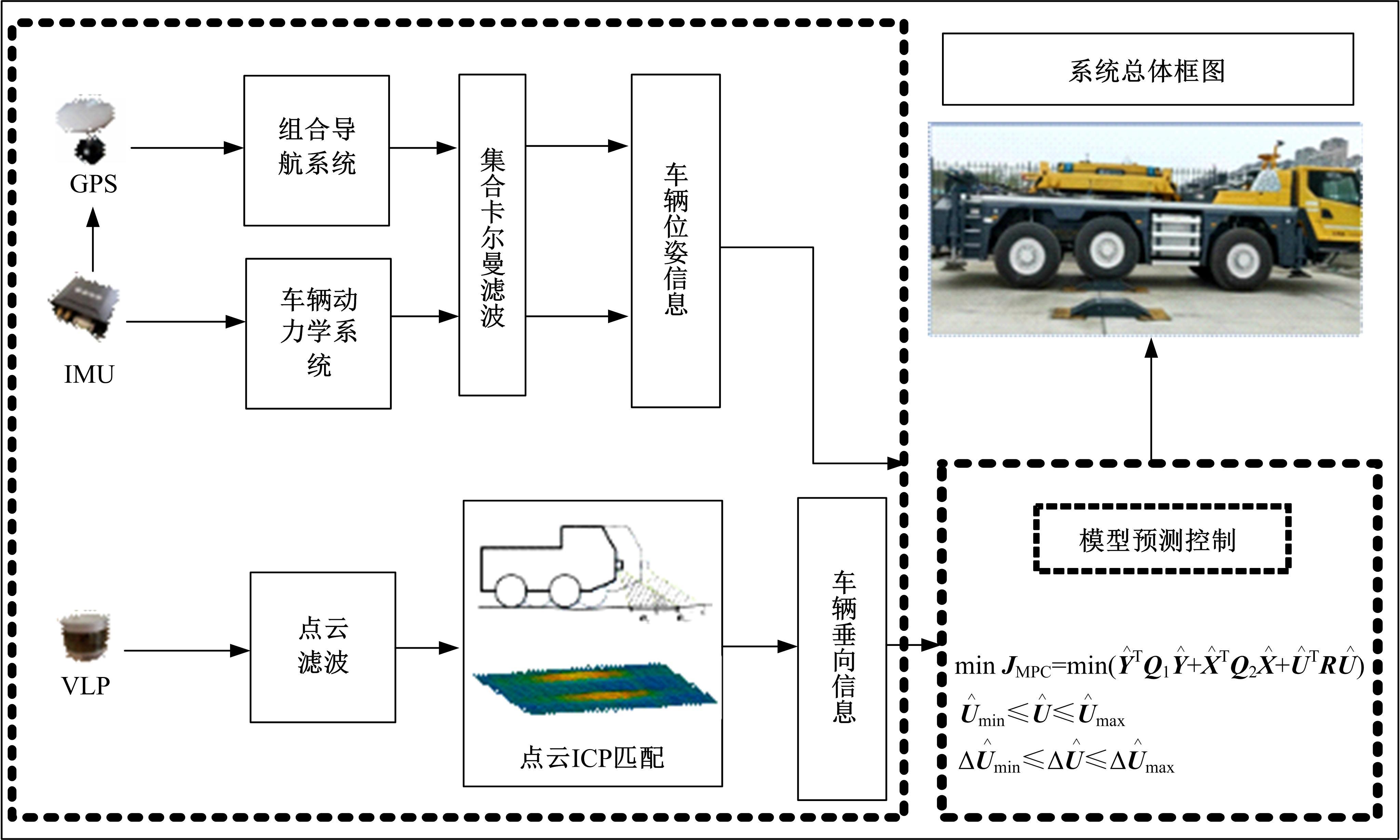
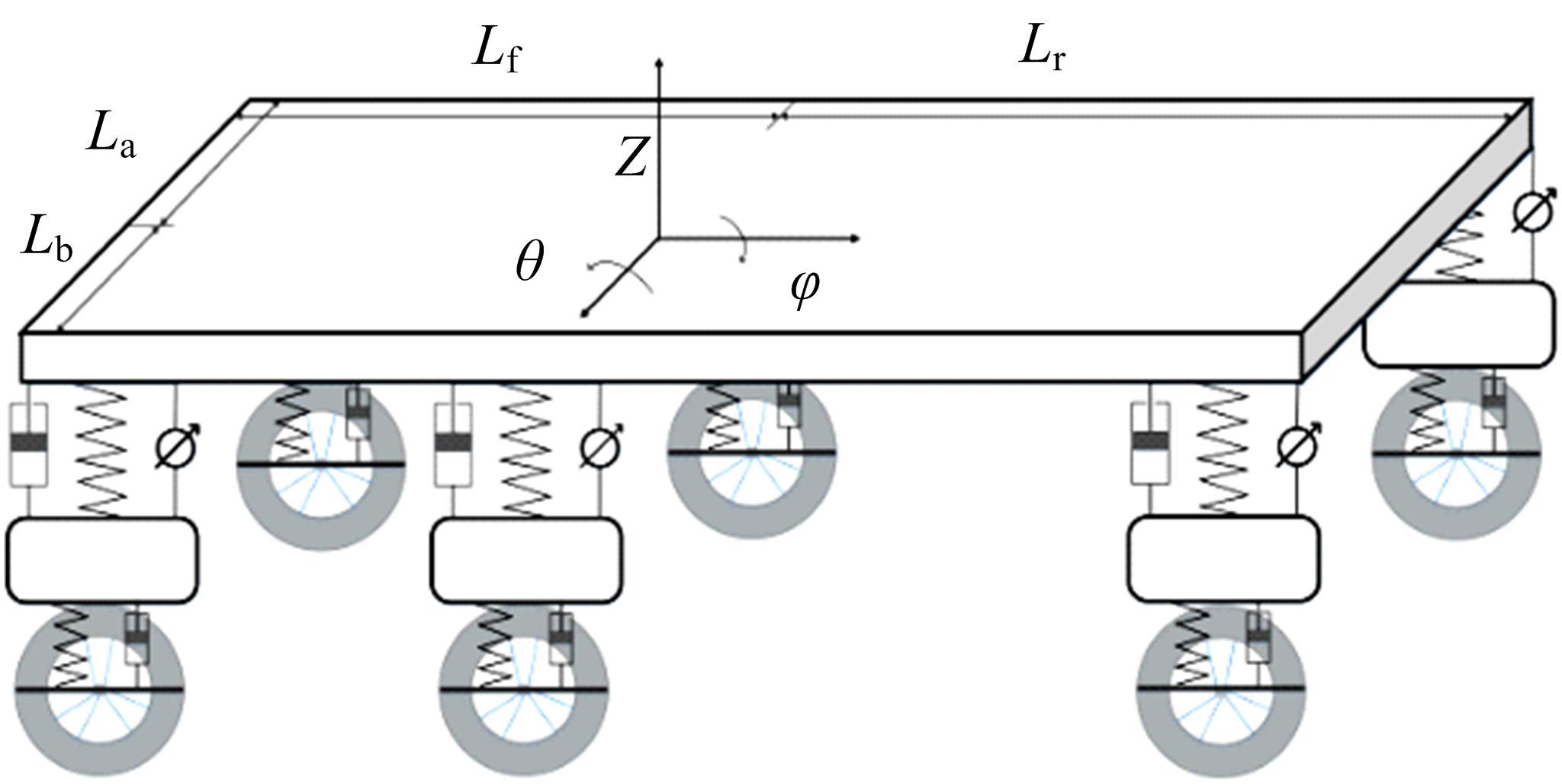
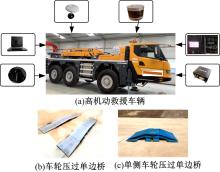
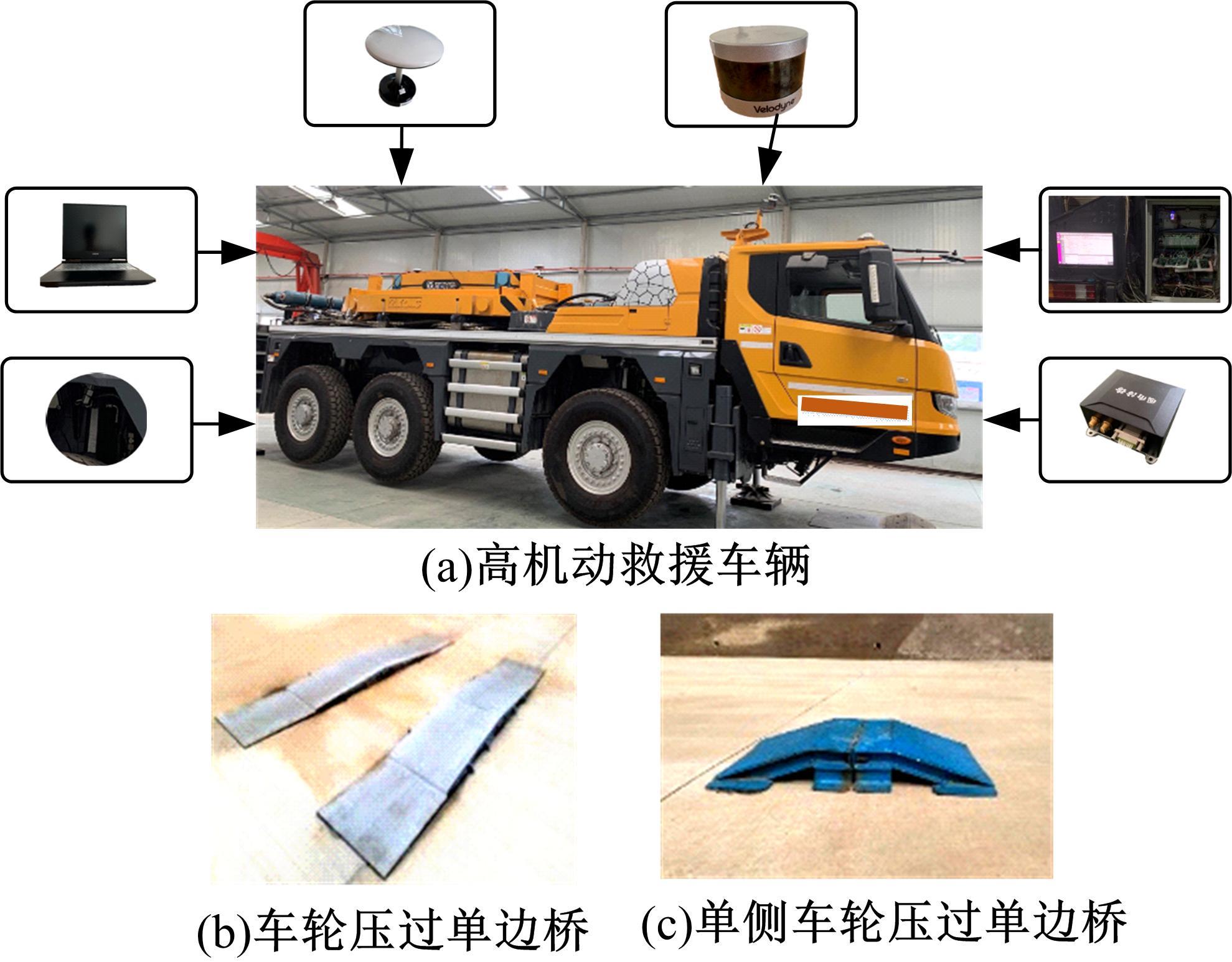
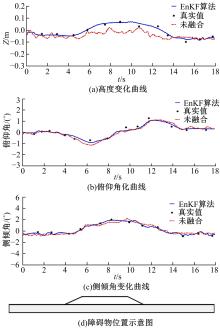
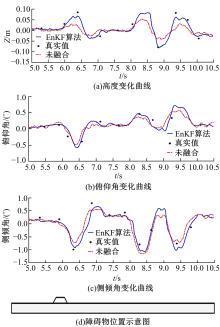
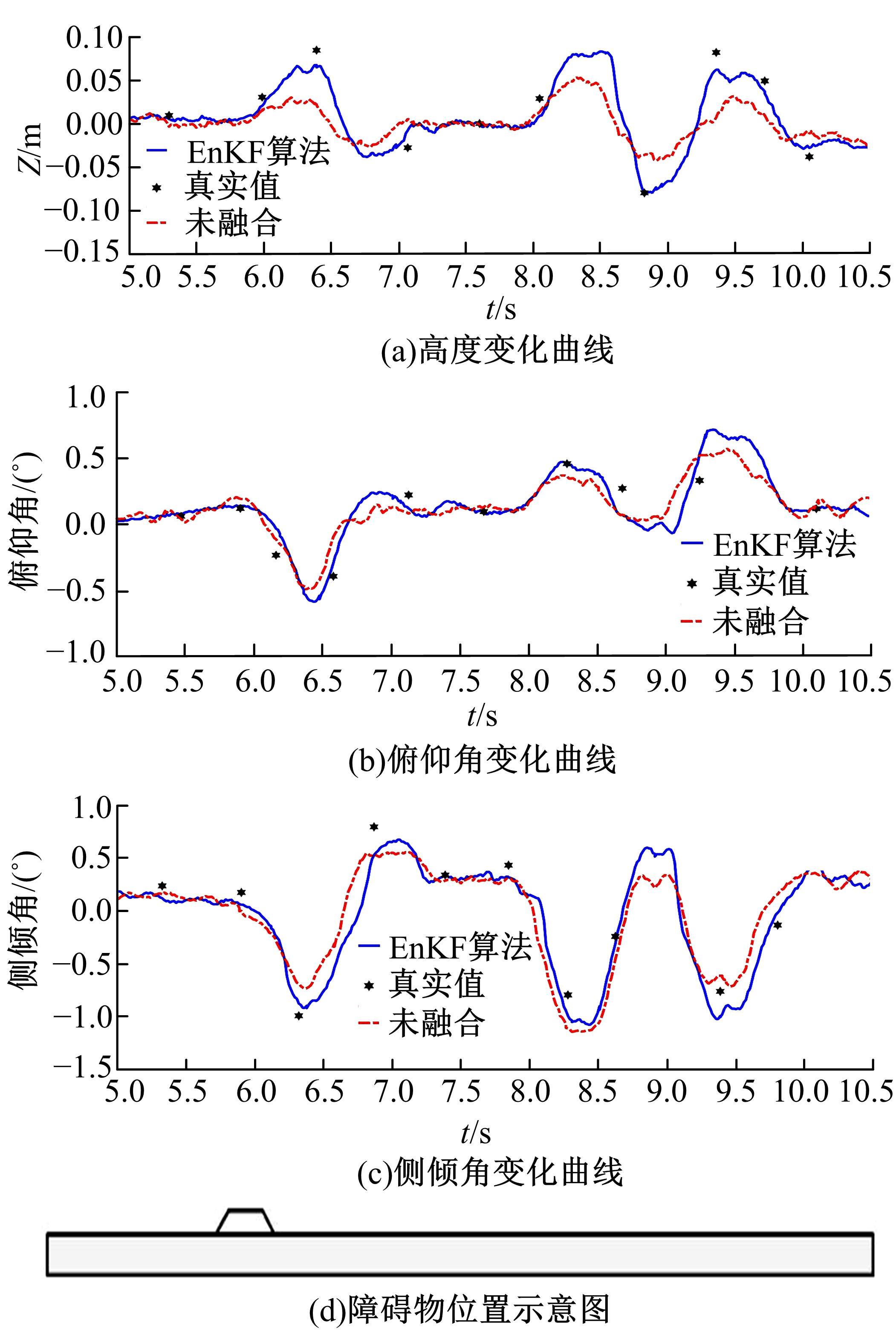
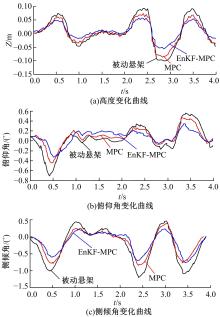
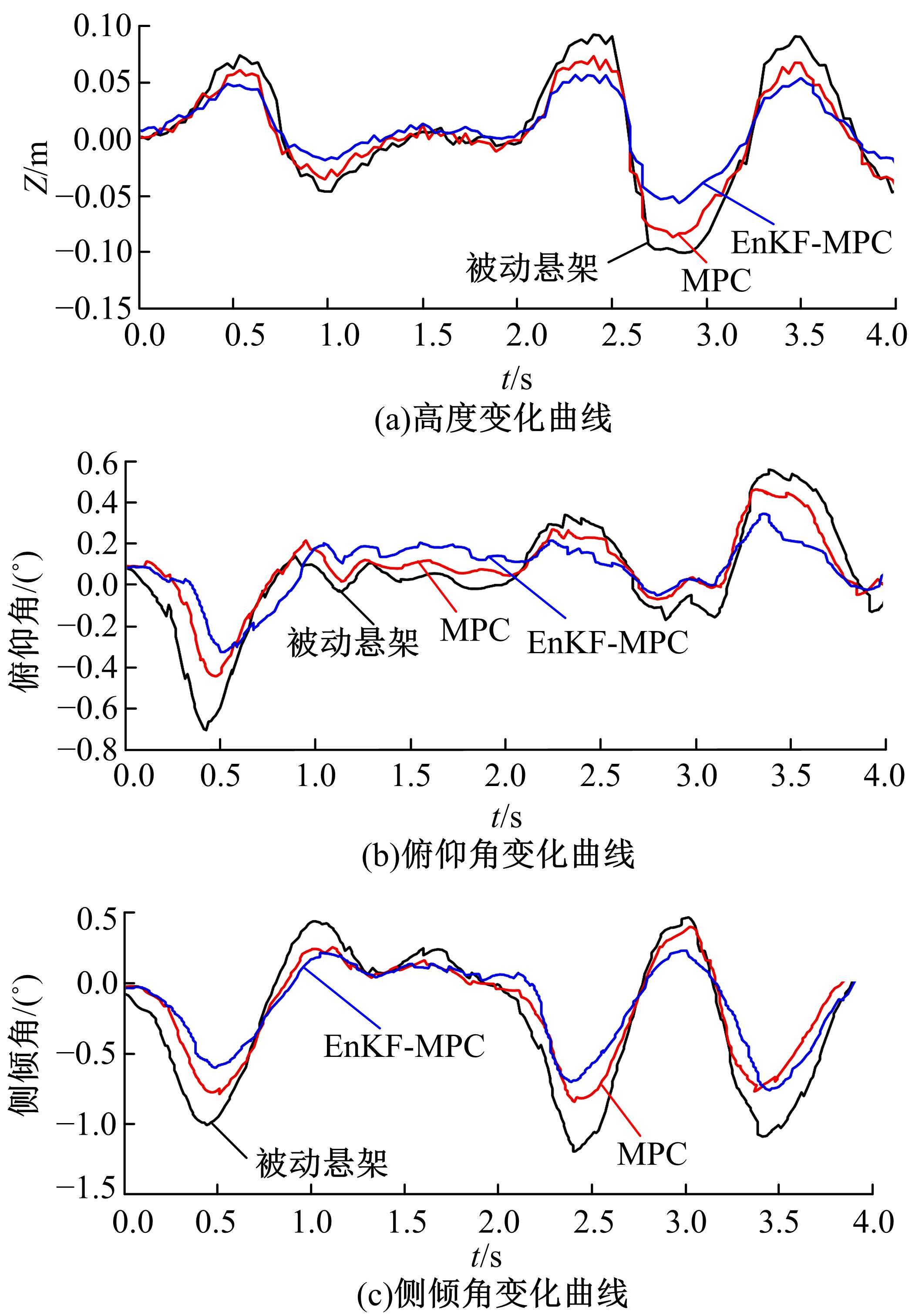
针对高机动救援车辆提出一种主动悬挂系统控制策略——基于集合卡尔曼滤波技术的模型预测控制策略(EnKF-MPC)。首先,对高机动救援车辆主动悬挂系统进行动力学建模,通过集合卡尔曼滤波技术完成车辆动力学系统和车载组合导航系统的数据融合,实现车辆位姿信息的精确估计;针对组合导航系统垂向位移误差较大的问题,设计了点云匹配算法,完成车辆垂向位移信息的精确评估。其次,提出了模型预测控制策略,将集合卡尔曼滤波算法得到的车辆位姿信息和车载雷达系统获取的道路信息作为系统输入对车辆主动悬挂系统进行实时控制。最后,进行了实车验证,结果表明,提出的车辆位姿估计算法垂向位移误差为±3.100 cm,俯仰角误差为±0.175°,侧倾角误差为±0.210°。相比于被动悬挂,提出的主动悬挂控制方法垂向位移均方根平均值降低37%,俯仰角度均方根平均值降低35%,侧倾角度均方根平均值降低35%,显著提升了车辆的行驶平顺性和操纵稳定性。
中图分类号:
- TP273


| 1 | 高路路, 马飞, 周志鸿, 等. 应急救援车辆产品概况[J]. 凿岩机械气动工具, 2017(1):52-61. |
| Gao Lu-lu, Ma Fei, Zhou Zhi-hong, et al. Products overview of emergency rescue vehicle[J]. Rock Drilling Machinery & Pneumatic Tools, 2017(1): 52-61. | |
| 2 | 刘清河,和题,刘燕宁. 抢险救援车技术现状分析及展望[J]. 中国应急救援,2010(5):16-17. |
| Liu Qin-he, He Ti, Liu Yan-ning. Analysis and prospect of rescue vehicle technology[J]. China Emergency Rescue, 2010(5):16-17. | |
| 3 | Xia Yuan-qing, Xu Ying-wei, Pu Fan, et al. Active disturbance rejection control for active suspension system of tracked vehicles[C]∥2016 IEEE International Conference on Industrial Technology, Taipei, C h i n a , 2016:No.16035629. |
| 4 | Waghmare D B, Asutkar V G, Patre B M. Extended disturbance observer based robust sliding mode control for active suspension system[J]. International Journal of Dynamics and Control, 2021, 9:1681-1694. |
| 5 | Pan Hui-hui, Sun Wei-chao, Gao Hui-jun, et al. Nonlinear tracking control based on extended state observer for vehicle active suspensions with performance constraints[J]. Mechatronics, 2015, 30: 363-370. |
| 6 | Sun W C, Gao H J, Kaynak O. Finite frequency H∞ control for vehicle active suspension systems[J]. IEEE Transactions on Control Systems Technology, 2011, 19(2): 416-422. |
| 7 | Yamashita M, Fujimori K, Hayakawa K, et al. Application of H∞ control to active suspension systems[J]. IFAC Proceedings Volumes, 1993, 26(2): 87-90. |
| 8 | Liu Lei, Li Xiang-sheng, Liu Yan-jun, et al. Neural network based adaptive event trigger control for a class of electromagnetic suspension systems[J]. Control Engineering Practice, 2021, 106: No.104675. |
| 9 | Ding Fei, Li Qian-long, Jiang Chao, et al. Event-triggered control for nonlinear leaf spring hydraulic actuator suspension system with valve predictive management[J]. Information Sciences, 2021, 551: 184-204. |
| 10 | Zhao F, Ge S, Tu F W, et al. Adaptive neural network control for active suspension system with actuator saturation[J]. IET Control Theory & Applications, 2016, 10(14): 1696-1705. |
| 11 | Huang Ying-bo, Na Jing, Wu Xing, et al. Adaptive control of nonlinear uncertain active suspension systems with prescribed performance[J]. ISA Transactions, 2015, 54:145-155. |
| 12 | Maleki N, Sedigh A K, Labibi B. Robust model reference adaptive control of active suspension system[C]∥2006 14th Mediterranean Conference on Control and Automation, Ancona, Italy, 2006: No.9189170. |
| 13 | 李宇昊,赵又群. 基于双层控制策略的四轮独立转向无人驾驶汽车路径跟踪[J]. 江苏大学学报:自然科学版, 2022,43(4): 386-393. |
| Li Yu-hao, Zhao You-qun. Path tracking of 4WIS autonomous vehicle based on double layer control strategy[J]. Journal of Jiangsu University(Natural Science Edition), 2022,43(4): 386-393. | |
| 14 | 姚雪莲,丁东东,杨艺,等. 汽车驾驶机器人的自适应执行器故障补偿控制设计[J]. 江苏大学学报:自然科学版,2021, 42(6): 642-647. |
| Yao Xue-lian, Ding Dong-dong, Yang Yi, et al. Failure compensation control design of adaptive actuator for vehicle robot driver[J]. Journal of Jiangsu University(Natural Science Edition), 2021, 42(6): 642-647. | |
| 15 | Bender E K. Optimum linear preview control with application to vehicle suspension[J]. J Basic Eng, 1968,90(2):213-221. |
| 16 | Iwata Y, Nakano M. Optimum preview control of vehicle air suspension[J]. Bull Jpn Soc Mech Eng, 1976,19(138):1485-1489. |
| 17 | Iwata Y, Nakano M. Optimal preview control of vehicle suspension[J]. Bull Jpn Soc Mech Eng, 1976, 19(129): 265-273. |
| 18 | Oraby W A H, Aly M A, El-Demerdash S M, et al. Influence of active suspension preview control on the vehicle lateral dynamics[C]∥SAE Technology Paper, 2007-01-2347. |
| 19 | Youn I, Tchamna R, Lee S H, et al. Preview suspension control for a full tracked vehicle[J]. International Journal of Automotive Technology, 2014, 15: 399-410. |
| 20 | Göhrle C, Schindler A. Road profile estimation and preview control for low band width active suspension systems[J]. IEEE/ASME Trans on Mechatronics, 2015, 20: 2299-2310. |
| 21 | Theunissen J, Sorniotti A, Gruber P. Regionless explicit model predictive control of active suspension systems with preview[J]. IEEE Transaction on Industrial Electronics, 2020, 67, 4877-4888. |
| 22 | Lee K T, Dai M J, Chuang C C. Temperature-compensated model for lithium-ion polymer batteries with extended Kalman filter state-of-charge estimation for an implantable charger[J]. IEEE Trans Ind Electron, 65(1): 589-596. |
| 23 | Fan R, Liu Y, Huang R, et al. Precise fault location on transmission lines using ensemble Kalman filter[J]. IEEE Trans Power Deliv, 33(6): 3252-3255. |
| 24 | Jiaolong Y, Hongdon L, Dylan C, et al. Go-ICP: a globally optimal solution to 3D ICP point-set registration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(11): 2241-2254. |
| 25 | 姜晓通,戴宁,张长东,等. 基于“滑移”主方向自适应采样的ICP 算法优化研究[J]. 中国机械工程, 2014, 25(4): 497-502. |
| Jiang Xiao-tong, Dai Ning, Zhang Chang-dong, et al. Research on ICP algorithm optimization based on "slap" principal direction adaptive sampling[J]. China Mechanical Engineering, 2014, 25(4): 497-502. |
| [1] | 胡云峰,于彤,杨惠策,孙耀. 低温环境下燃料电池启动优化控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 2034-2043. |
| [2] | 吴文静,战勇斌,杨丽丽,陈润超. 考虑安全间距的合流区可变限速协调控制方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1315-1323. |
| [3] | 彭浩楠,唐明环,查奇文,王伟忠,王伟达,项昌乐,刘玉龙. 自动驾驶汽车双车道换道最优轨迹规划方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2852-2863. |
| [4] | 杨志军,高忠义,王丽君,黄观新,危宇泰. 面向刚柔耦合定位平台的模型预测控制算法[J]. 吉林大学学报(工学版), 2022, 52(12): 2806-2815. |
| [5] | 成耀荣,杨谦,郑国华. 考虑碳排放的大型制造企业甩挂运输牵引车调度优化[J]. 吉林大学学报(工学版), 2021, 51(3): 893-899. |
| [6] | 滕志军,张宇,李昊天,孙铭阳. 复杂路网的自适应D⁃S证据理论地图匹配算法[J]. 吉林大学学报(工学版), 2021, 51(2): 524-530. |
| [7] | 贾超,徐洪泽,王龙生. 基于多质点模型的列车自动驾驶非线性模型预测控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1913-1922. |
| [8] | 张云龙,郭阳阳,王静,梁东. 钢-混凝土组合梁的固有频率及其振型[J]. 吉林大学学报(工学版), 2020, 50(2): 581-588. |
| [9] | 马苗苗,潘军军,刘向杰. 含电动汽车的微电网模型预测负荷频率控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1644-1652. |
| [10] | 唐晓峰, 高峰, 徐国艳, 丁能根, 蔡尧, 刘建行. 基于智能空间-车框架理论的车辆行驶运动学状态的预测[J]. 吉林大学学报(工学版), 2015, 45(5): 1395-1401. |
| [11] | 许芳1, 2, 靳伟伟2, 陈虹1, 2, 张振威2. 一种模型预测控制器的FPGA硬件实现[J]. 吉林大学学报(工学版), 2014, 44(4): 1042-1050. |
| [12] | 石屹然, 田彦涛, 史红伟, 张立. 基于Modified Volterra模型的SI发动机空燃比非线性模型预测控制[J]. 吉林大学学报(工学版), 2014, 44(2): 538-547. |
| [13] | 王国林, 傅乃霁, 张建, 裴紫嵘. 基于K-R动力学模型的子午线轮胎硫化过程仿真[J]. 吉林大学学报(工学版), 2013, 43(03): 659-664. |
| [14] | 李刚, 宗长富, 陈国迎, 洪伟, 何磊. 线控四轮独立驱动轮毂电机电动车集成控制[J]. , 2012, 42(04): 796-802. |
| [15] | 王晶, 张成春, 张春艳, 任露泉. 客车侧围格栅对发动机舱内热环境的影响 [J]. , 2012, (03): 563-568. |
|